新型仿生水-空跨介質(zhì)航行器結(jié)構(gòu)設(shè)計(jì)
2023-01-27 05:45:42李宏源陳迎亮呂鵬宇段慧玲
水下無(wú)人系統(tǒng)學(xué)報(bào) 2022年6期
關(guān)鍵詞:模態(tài)設(shè)計(jì)
李宏源 ,呂 凱 ,陳迎亮 ,朱 敏 ,呂鵬宇 ,段慧玲
(1.北京大學(xué) 工學(xué)院,北京,100871;2.中國(guó)船舶集團(tuán)有限公司 第705 研究所昆明分部,云南 昆明,650101;3.北京大學(xué) 南昌創(chuàng)新研究院,江西 南昌,330096)
0 引言
水-空跨介質(zhì)航行器是一種可以自由跨越水-空界面,靈活切換工作環(huán)境的新型海洋裝備,融合了水下滑移邊界減阻[1]、超空泡水翼、仿生變體等技術(shù),具有自主性強(qiáng)、高效機(jī)動(dòng)、可適應(yīng)復(fù)雜水況等優(yōu)點(diǎn)。在軍事領(lǐng)域,跨介質(zhì)航行器的兩棲作業(yè)特性使其在眾多應(yīng)用領(lǐng)域具有其他無(wú)人系統(tǒng)無(wú)法比擬的優(yōu)勢(shì)。跨介質(zhì)飛行器可以遠(yuǎn)距離發(fā)射,自主飛行到目標(biāo)區(qū)域?qū)崿F(xiàn)潛水偵察、監(jiān)視或突襲攻擊。完成既定任務(wù)后,其可以停泊待命或搭載獲取到的數(shù)據(jù)返航,既提高了任務(wù)效率,又增加了任務(wù)的成功率。因此,開(kāi)發(fā)高性能水-空跨介質(zhì)航行器具有重要的軍事價(jià)值。
目前,國(guó)內(nèi)、外研究機(jī)構(gòu)針對(duì)跨介質(zhì)航行器的研究成果已有很多。國(guó)內(nèi)方面,北京航空航天大學(xué)研制的水空兩棲飛行器“飛魚(yú)”,可用于協(xié)助潛艇完成偵察和攻擊任務(wù)[2];西北工業(yè)大學(xué)研究了兩棲跨介質(zhì)飛行器的滑跳彈道特點(diǎn),并建立了水空滑跳動(dòng)力學(xué)模型[3-6];南昌航空大學(xué)研制了一種潛水飛機(jī),可通過(guò)2 次變體完成飛行模式和潛水模式的轉(zhuǎn)換[7-8];北京航空航天大學(xué)提出一種潛水無(wú)人機(jī)的概念結(jié)構(gòu)設(shè)計(jì)方案,所研制的潛水無(wú)人機(jī)采用中空機(jī)翼設(shè)計(jì),可通過(guò)注、排水調(diào)節(jié)其平均密度,實(shí)現(xiàn)下潛和上浮[9];中科院自動(dòng)化研究所從控制角度對(duì)無(wú)人水上飛機(jī)的自主起飛展開(kāi)了研究,考慮到直接利用非線性模型設(shè)計(jì)控制器的困難,采用T-S 模糊辨識(shí)得到的線性差分整合移動(dòng)平均自回歸(autoregressive integrated moving average,ARIMA)模型來(lái)表征無(wú)人水上飛機(jī)在不同運(yùn)動(dòng)階段的動(dòng)態(tài)特性,為了實(shí)現(xiàn)對(duì)期望俯仰角的跟蹤,提出了基于線性模型的廣義預(yù)測(cè)控制[10];上海交通大學(xué)在2019~2022 年間先后研制了4 代多旋翼水空跨介質(zhì)飛行器[11-14],該系列飛行器靠旋翼和螺旋槳提供動(dòng)力,通過(guò)調(diào)整旋翼和螺旋槳的轉(zhuǎn)速實(shí)現(xiàn)空中和水下運(yùn)動(dòng)。
國(guó)外方面,密歇根大學(xué)研制了“Flying Fish”飛行器,并對(duì)其結(jié)構(gòu)、航電和導(dǎo)航系統(tǒng)等方面進(jìn)行了研究[15-17];美國(guó)哈佛大研制了RoboBee 微型機(jī)器人,并利用電解水的方式實(shí)現(xiàn)了水空跨域[18];麻省理工學(xué)院開(kāi)發(fā)了一款仿飛魚(yú)機(jī)器人樣機(jī),對(duì)其機(jī)構(gòu)設(shè)計(jì)和控制方式進(jìn)行了研究[19];英國(guó)布里斯托大學(xué)開(kāi)發(fā)了一種以仿生撲翼為推動(dòng)工具的潛水無(wú)人機(jī),最終實(shí)現(xiàn)了水空跨域[20-21];帝國(guó)理工學(xué)院開(kāi)發(fā)了一種仿魷魚(yú)水-空跨介質(zhì)航行器模型,先后在航行器使用噴氣裝置、固體炸藥裝置完成了從水中到空中的跨躍[22-23]。
與國(guó)外相比,我國(guó)在水-空跨介質(zhì)航行器的概念設(shè)計(jì)、樣機(jī)結(jié)構(gòu)設(shè)計(jì)、結(jié)構(gòu)輕量化設(shè)計(jì)及介質(zhì)轉(zhuǎn)換方式等方面還有待進(jìn)一步強(qiáng)化。基于此,文中開(kāi)發(fā)了一種新型仿“飛魚(yú)”結(jié)構(gòu)的水-空跨介質(zhì)航行器,其仿生結(jié)構(gòu)設(shè)計(jì)見(jiàn)圖1。通過(guò)加裝變體水翼和折疊空翼2 套機(jī)構(gòu),保證該航行器實(shí)現(xiàn)水下定深潛行,水面高速航行以及空中定高飛行。
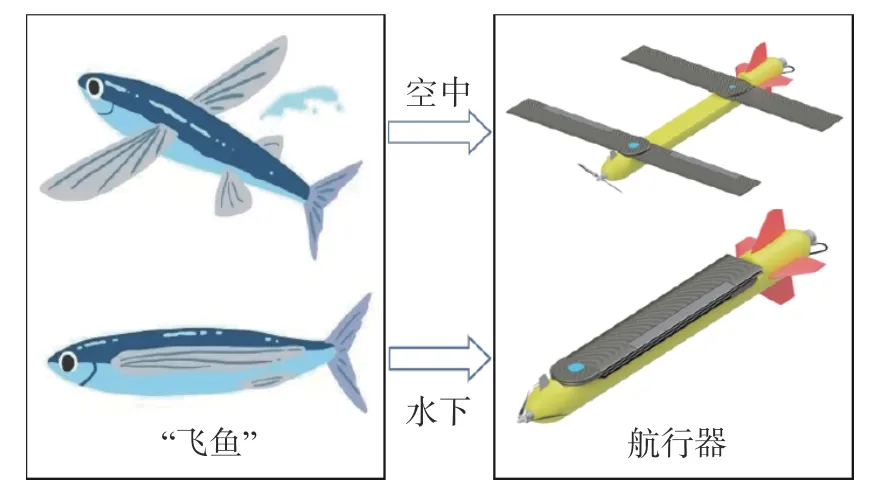
圖1 水-空跨介質(zhì)航行器仿生結(jié)構(gòu)設(shè)計(jì)圖Fig.1 Bionics design diagrams of water-air cross-domain vehicles
1 主體結(jié)構(gòu)布局
如圖2 所示,水-空跨介質(zhì)航行器整體分為艇體(艏部模塊、主控模塊、動(dòng)力能源模塊、航向操控模塊和噴水推進(jìn)模塊)、水翼和空翼。艏部模塊前方裝有可折疊的推進(jìn)螺旋槳;主控模塊由載體的艙體外殼、光纖慣導(dǎo)、主控制器深度計(jì)、入水傳感器、頻閃燈及水下天線構(gòu)成;能源模塊為整個(gè)跨介質(zhì)航行器供電,內(nèi)置電池管理單元,可實(shí)時(shí)監(jiān)測(cè)電池組狀態(tài);航向操控模塊由干艙與濕艙兩部分組成,濕艙與噴水推進(jìn)器相互連接,組成閉合實(shí)體;噴水推進(jìn)模塊選用噴水推進(jìn)器,其輸入電壓為48~56 V,當(dāng)控制油門(mén)為80%時(shí),其推力可達(dá)440~550 N;此外,在外部加裝了穩(wěn)定翼結(jié)構(gòu)。
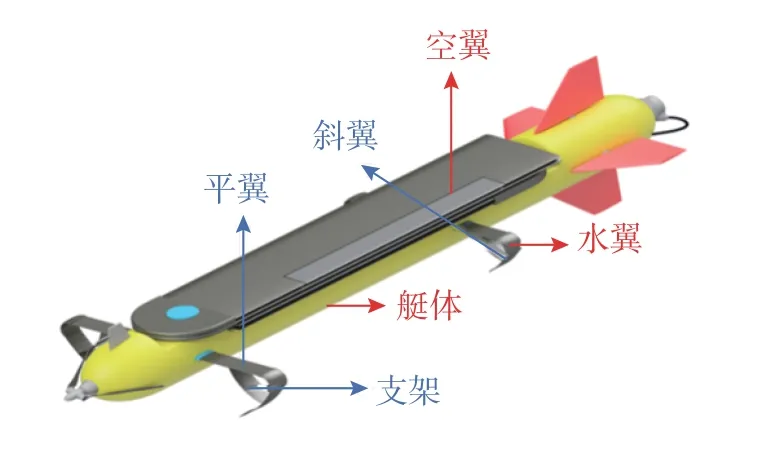
圖2 水-空跨介質(zhì)航行器整體布局Fig.2 Overall layout of a water-air cross-domain vehicle
1.1 變體水翼機(jī)構(gòu)
1.1.1 水翼設(shè)計(jì)
為保證航行器在水面模態(tài)下高速航行,擬在跨介質(zhì)航行器主體前后部?jī)蓚?cè)分別安裝2 組不同尺寸的對(duì)稱(chēng)水翼,水翼安裝部位對(duì)齊且位于航行器艇體的中邊緣,如圖2 藍(lán)色箭頭所示。前后水翼包括平翼、斜翼和支架三部分。整體方案要求水翼在2°~5°攻角范圍內(nèi)有較大的升力系數(shù)和升阻比,考慮選取AG24 翼型。對(duì)比發(fā)現(xiàn),該翼型不僅具有較高升力系數(shù)和升阻比,而且其最大相對(duì)厚度最大,可以兼顧水動(dòng)力性能和強(qiáng)度要求,如圖3 所示。

圖3 AG24 翼型曲線Fig.3 Airfoil curve of AG24
水翼弦長(zhǎng)為

式中:W為總排水量;v為目標(biāo)滑跑速度;Cl為翼型升力系數(shù);l為單個(gè)斜翼在水下的長(zhǎng)度;θ為平翼和斜翼的夾角。
根據(jù)計(jì)算流體動(dòng)力學(xué)(computational fluid dynamics,CFD)的計(jì)算結(jié)果,選取水翼弦長(zhǎng)為40 mm。航行器工作時(shí)主要由斜翼提供升力,結(jié)合航行器預(yù)估的總排水量以及目標(biāo)滑跑速度,由式(1)可以計(jì)算出水翼斜翼的展長(zhǎng)尺寸。此外,為保證噴水推進(jìn)時(shí)吸水口有足夠的水下深度,將前、后翼的斜翼設(shè)計(jì)為不同的長(zhǎng)度,使得航行器在水面巡航時(shí)保持尾傾姿態(tài)。其中,前水翼平翼長(zhǎng)度205 mm,斜翼長(zhǎng)度177 mm;后水翼平翼長(zhǎng)度115 mm,斜翼長(zhǎng)度100 m。
1.1.2 水翼變體機(jī)構(gòu)設(shè)計(jì)
水翼的收縮運(yùn)動(dòng)由2 個(gè)對(duì)稱(chēng)的曲柄滑塊機(jī)構(gòu)控制,如圖4(a)所示,可以實(shí)現(xiàn)水翼在90°內(nèi)的收縮,其收縮過(guò)程如圖4(b)、(c)所示。推桿由伺服電機(jī)驅(qū)動(dòng)蝸輪蝸桿減速器實(shí)現(xiàn)往復(fù)運(yùn)動(dòng),同時(shí)蝸輪蝸桿機(jī)構(gòu)還具備自鎖功能,實(shí)現(xiàn)水翼在收縮過(guò)程中達(dá)到指定工作位置后的固定。水翼斜翼的收縮是由曲柄滑塊機(jī)構(gòu)控制,如圖4(d)所示,當(dāng)滑塊向本體側(cè)移動(dòng)時(shí),斜翼閉合;當(dāng)滑塊向遠(yuǎn)離本體側(cè)移動(dòng)時(shí),斜翼張開(kāi)。
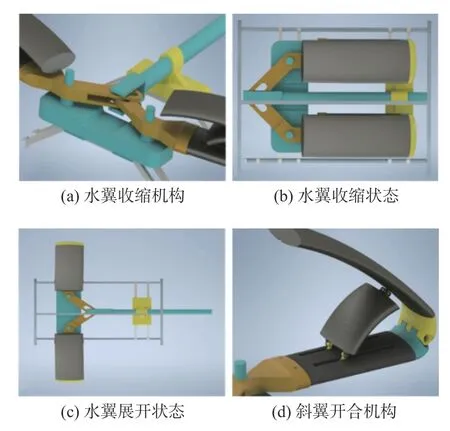
圖4 水翼變體機(jī)構(gòu)設(shè)計(jì)原理圖Fig.4 Schematic diagram of hydrofoil variant mechanism
1.2 折疊空翼機(jī)構(gòu)
1.2.1 空翼設(shè)計(jì)
為保證航行器具有定高飛行的能力,研制并安裝了2 對(duì)空翼。圖5 是空翼和螺旋槳處于展開(kāi)狀態(tài)的模型圖,此時(shí)為了減阻,將水翼收縮。
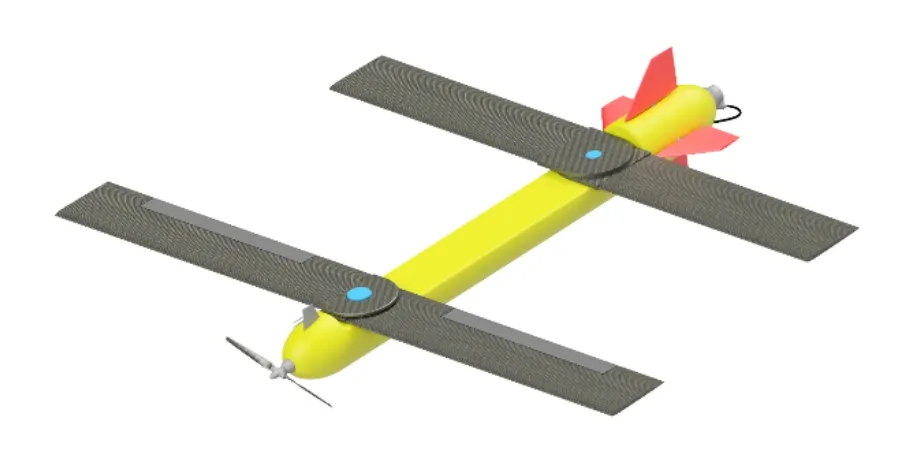
圖5 空翼及螺旋槳展開(kāi)狀態(tài)示意圖Fig.5 Expansion state of air wings and propellers
文中擬采用大展弦比的翼布局形式,初步選擇245 N/m2的翼載荷。根據(jù)翼載荷及航行器的最大起飛重量,計(jì)算需用機(jī)翼面積

式中:G為航向器的總質(zhì)量;μ為翼載荷。
航行器前飛速度為25 m/s,馬赫數(shù)為0.07,屬于典型的低速飛機(jī),因而空翼翼型應(yīng)選用低速翼型,文中項(xiàng)目選擇NACA2412 翼型。
根據(jù)空翼展弦比和空翼面積,可計(jì)算得到每一排空翼的展長(zhǎng)和翼型弦長(zhǎng)參數(shù)。結(jié)合翼折疊機(jī)構(gòu)的布局細(xì)節(jié),最終確定翼型弦長(zhǎng)0.25 m,前排翼的展長(zhǎng)2.2 m,后面翼的展長(zhǎng)1.9 m。為滿足巡航階段的升力需求,結(jié)合翼型的升力系數(shù)與其攻角的關(guān)系,對(duì)空翼選擇適當(dāng)?shù)陌惭b角為7°,此時(shí)翼型的升力系數(shù)為0.85。左右空翼后緣中部設(shè)置副翼,用于滾轉(zhuǎn)姿態(tài)控制及起飛爬升增升。
1.2.2 空翼折疊機(jī)構(gòu)設(shè)計(jì)
水-空跨介質(zhì)航行器需要同時(shí)具備空中和水下的航行特性,以實(shí)現(xiàn)高速航行。在空中飛行時(shí),機(jī)翼處于展開(kāi)狀態(tài),為航行器提供飛行升力。水下航行時(shí),機(jī)翼折疊于機(jī)身本體上部,可減小水下航行阻力,提升水下航行速度,增加航行器的水下續(xù)航能力。空翼折疊機(jī)構(gòu)設(shè)計(jì)方案如圖6 所示。
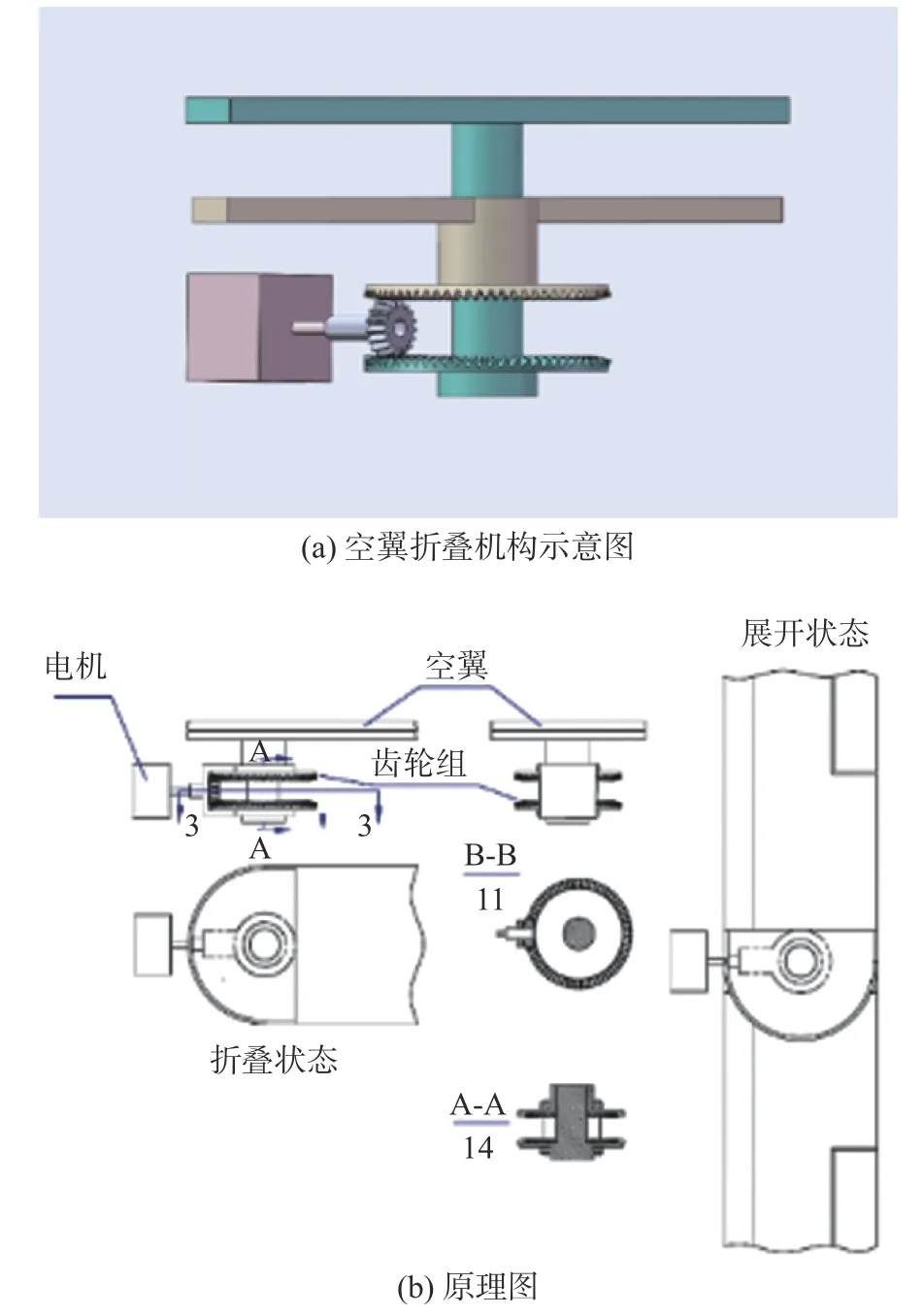
圖6 空翼折疊機(jī)構(gòu)設(shè)計(jì)方案Fig.6 Schematic diagram of air wings folding mechanism
空翼折疊機(jī)構(gòu)采用共軸反向雙齒輪盤(pán)設(shè)計(jì)方案,類(lèi)似于共軸式雙槳直升機(jī)的螺旋槳設(shè)計(jì)結(jié)構(gòu)。前后2 對(duì)機(jī)翼的折疊機(jī)構(gòu)分別由獨(dú)立的電機(jī)進(jìn)行驅(qū)動(dòng),驅(qū)動(dòng)電機(jī)驅(qū)動(dòng)錐齒輪轉(zhuǎn)動(dòng),并帶動(dòng)2 個(gè)機(jī)翼旋轉(zhuǎn)軸的齒輪盤(pán)進(jìn)行反向轉(zhuǎn)動(dòng),進(jìn)而實(shí)現(xiàn)機(jī)翼的展開(kāi)和折疊。齒輪盤(pán)上帶有限位結(jié)構(gòu),在機(jī)翼達(dá)到設(shè)定的展開(kāi)或折疊角度后,齒輪被限位,完成機(jī)翼的展開(kāi)或折疊運(yùn)動(dòng)。
2 仿真與分析
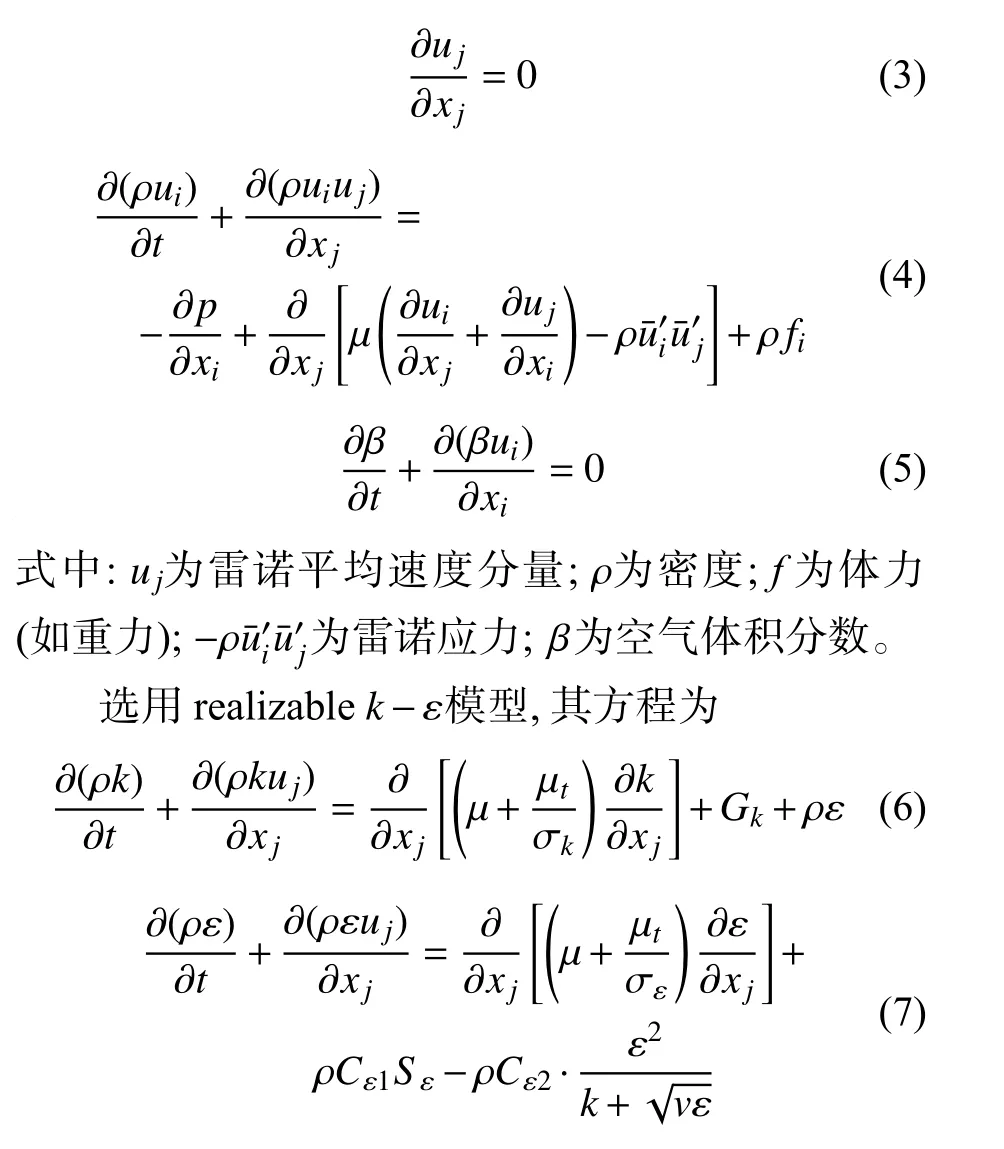
利用商業(yè)軟件Star CCM+得到水-空航行器的水動(dòng)力性能和氣動(dòng)性能,驗(yàn)證了方案的可行性。水下/水面模態(tài)進(jìn)行單相計(jì)算,水面模態(tài)進(jìn)行多相計(jì)算。計(jì)算中湍流模型采用realizablek-ε模型,壁面采用混合壁面函數(shù),壁面y+小于10。
采用不可壓縮流體的雷諾平均計(jì)算方法,水面模態(tài)多相流計(jì)算中的控制方程為
2.1 水下模態(tài)
航行器在水下時(shí)的狀態(tài)如圖7 所示,此時(shí)水翼、空翼和螺旋槳均處于收縮狀態(tài)。
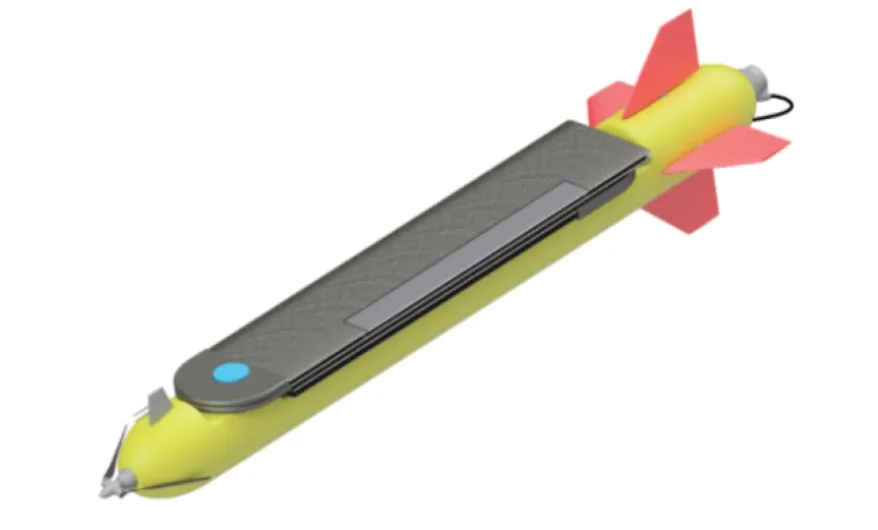
圖7 空翼及螺旋槳折疊狀態(tài)概念模型Fig.7 Conceptual model of air wings and propellers in folding state
圖8 為航行器以5 kn 速度在水下航行時(shí)的阻力曲線。可以看出,速度為5 kn 時(shí),水下航行器的總阻力約為30 N,其中壓差阻力占比較大,摩擦阻力占比較小,分別約為13 N 和17 N。水下航行阻力小于推力,滿足推進(jìn)要求。
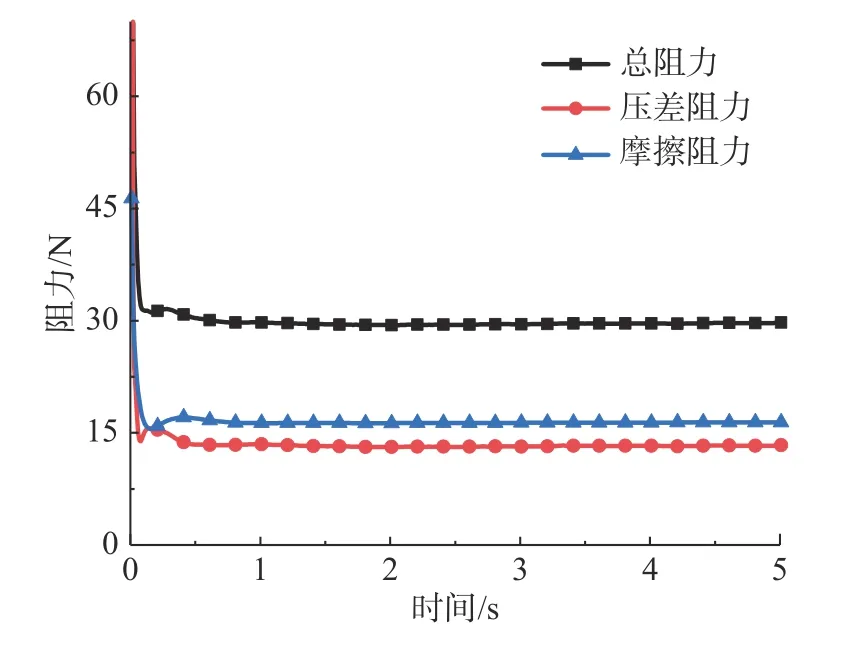
圖8 航行器以5 kn 速度水下航行時(shí)的阻力曲線Fig.8 Drag force curves of the vehicle when running underwater at the speed of 5 kn
圖9 為航行器水下航行時(shí)的表面總壓力云圖。在航行過(guò)程中,航行器艏部會(huì)形成流場(chǎng)駐點(diǎn),此處流場(chǎng)中流體局部速度為零,因此會(huì)形成局部高壓區(qū)。航行器中間部分無(wú)明顯壓差,證明其流線型較好、阻力較小。圖10 流線圖顯示,航行器艇身的流線型較好,其產(chǎn)生的阻力以摩擦阻力為主。
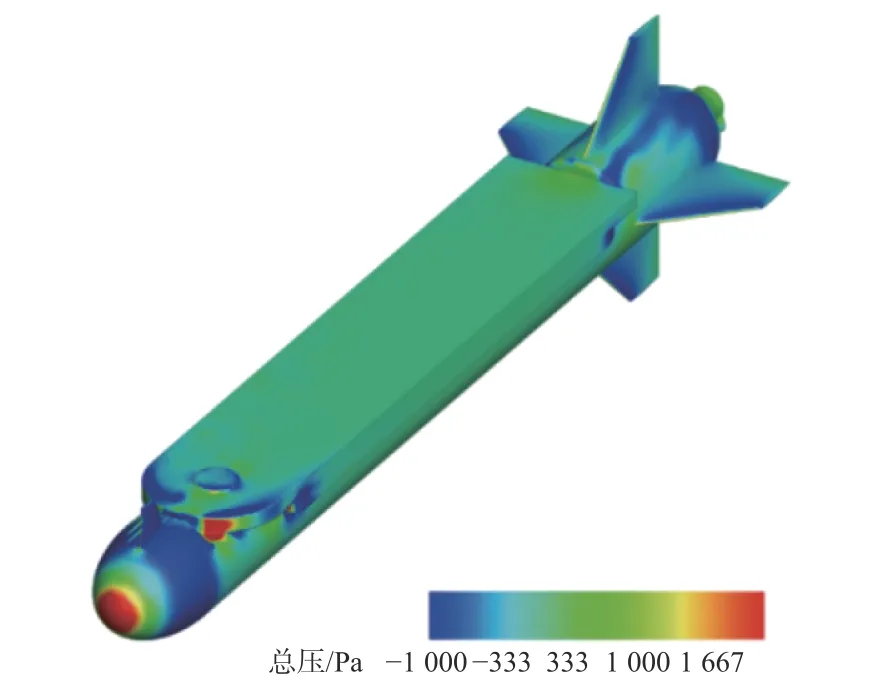
圖9 水下航行時(shí)航行器表面總壓Fig.9 The total pressure on the surface of the vehicle when running underwater
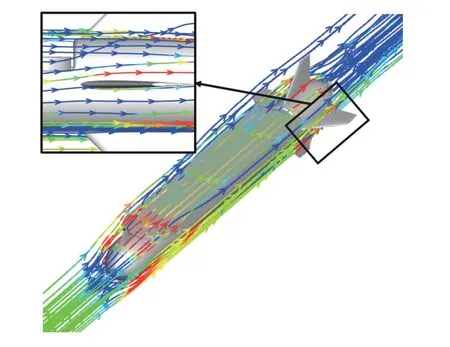
圖10 航行器艇體附近流線Fig.10 Streamlines near the vehicle
2.2 水面模態(tài)
航行器在水面巡航的狀態(tài)如圖11 所示,此時(shí)水翼呈展開(kāi)狀態(tài),空翼呈折疊狀態(tài)。圖11(a)分別為航行器在10,15,20 和40 kn 時(shí)的阻力曲線,可以看出,阻力隨航行器速度增大而增大,40 kn 時(shí)最大阻力約為360 N,該阻力小于噴水推進(jìn)的推力,滿足設(shè)計(jì)需求。圖11(b)分別繪制了航行器總機(jī)的升阻比曲線,可以看出,航行器穩(wěn)定航行后,整個(gè)航行器的升阻比會(huì)隨航速增大而減小。
2.3 空中模態(tài)
航行器在空中模態(tài)下的計(jì)算結(jié)果如圖12 所示,總升力258 N,滿足巡航速度25 m/s、總質(zhì)量25 kg的要求;總阻力32 N,小于螺旋槳巡航時(shí)50 N 牽引力的設(shè)計(jì)。
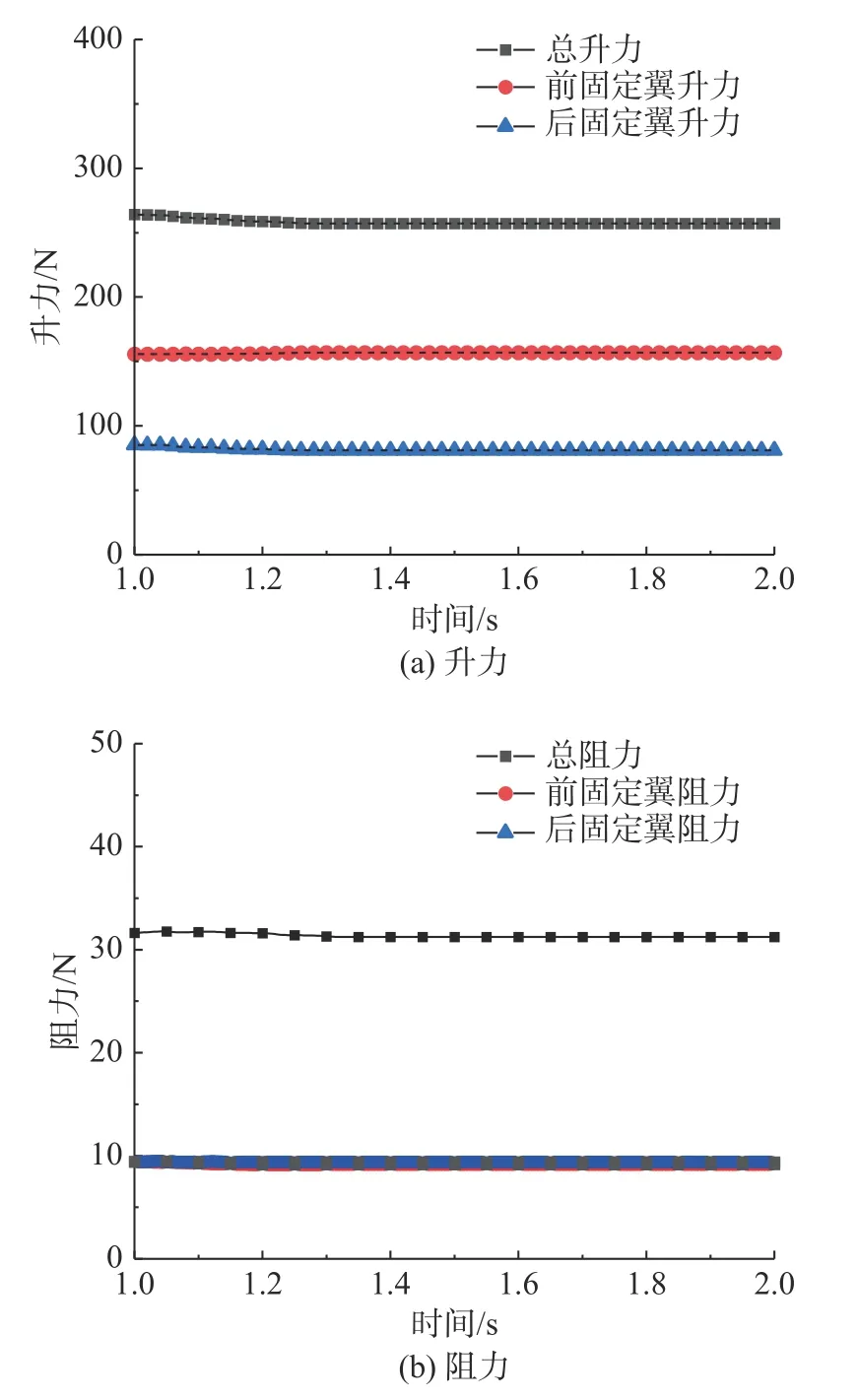
圖12 水-空跨介質(zhì)航行器空中飛行時(shí)升阻力變化曲線Fig.12 Lift force and drag force curves of the water-air cross-domain vehicle during air flight
圖13 可對(duì)航行器氣動(dòng)部件之間的耦合效應(yīng)進(jìn)行定性分析。一方面,從圖中可以觀察到翼根部折疊機(jī)構(gòu)對(duì)流場(chǎng)的影響,另一方面,在航行器的串列翼布局中,前翼略高于后翼,這樣能夠減緩前翼流場(chǎng)對(duì)后翼的影響。圖14 繪制了翼梢周?chē)牧骶€,圖中(a)處顯示流線均勻地流過(guò)翼面,說(shuō)明空翼能夠保持良好的氣動(dòng)特性;圖中(b)處可明顯觀察到前緣駐點(diǎn)上方氣體從上表面流過(guò),下方氣體從下表面流過(guò)。由于翼型上下表面長(zhǎng)度不同,因而導(dǎo)致流體在上下表面的流速不同,從而產(chǎn)生升力。
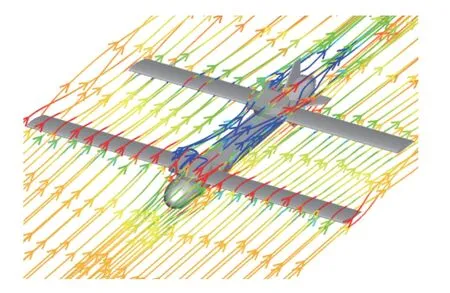
圖13 航行器空中飛行時(shí)附近流線Fig.13 Streamlines of vehicle during air flight
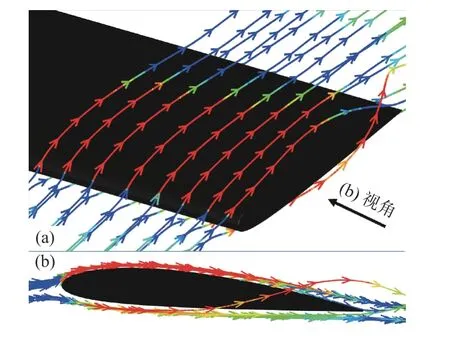
圖14 翼梢周?chē)骶€Fig.14 Streamlines near the wingtips
3 結(jié)束語(yǔ)
文中設(shè)計(jì)了一種新型仿生水-空跨介質(zhì)航行器結(jié)構(gòu),解決了水-空跨介質(zhì)航行器在布局設(shè)計(jì)、輕量化設(shè)計(jì)、介質(zhì)轉(zhuǎn)換方式等方面存在的問(wèn)題,對(duì)未來(lái)跨介質(zhì)航行器的研究具有一定的指導(dǎo)意義。由于該跨介質(zhì)航行器的魯棒性中還未得到檢驗(yàn),未來(lái)還需從工程樣機(jī)角度對(duì)該方案展開(kāi)論證。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(bào)(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:39