一種針對圓錐體外表面貼裝的機械手設計分析與優化
2023-01-16 03:02:36何宇凡孫江宏李乃崢何雪萍王軍見
中國機械工程 2023年1期
關鍵詞:優化
何宇凡 孫江宏,2 高 鋒 李乃崢 何雪萍 王軍見
1.北京信息科技大學機電工程學院,北京,100192 2.清華大學機械電子工程研究所,北京,100084 3.中國機械科學研究總院集團,北京,100044 4.國家機床質量監督檢測中心,北京,100102
0 引言
貼裝源于SMT(surface mounted technology),最初應用在航空航天領域,流行于電子組裝行業。貼裝技術可以參考貼片機設備,通過吸取、檢測、定位和貼裝等動作配合將元器件安裝于PCB(printed circuit board)表面[1]。貼裝技術發展歷經數十載已經得到長足的進步,機構原理和工作方式已趨于穩定,目前研究主要集中在優化部件配合進而提高貼裝效率以及算法預測貼裝性能從而提高貼裝質量[2-3]。針對以獲得最小周期時間為目標的線平衡問題[4-7], HE等[8]提出一種分層啟發式方法平衡多臺相同設備間工作量,周期時間降低了6.94%。PARK等[9]提出一種用于多頭表面貼裝機的裝配規劃方法,通過將動態規劃技術應用于饋線布置優化和布局順序優化,最終縮短裝配時間。王君等[10]基于改進蟻群算法對貼裝過程進行優化,276個、44種元器件的貼裝效率提高了6.45%。近年來人們利用設備信號來監測、預測貼裝過程,采用的方法有離散小波變換(DWT)[11]、二代小波變換(SGWT)[12]、循環譜分析[13]和經驗模態分解(EMD)[14]等。WANG等[3]采用三維雙樹復小波變換及遞歸神經網絡對低噪干擾下的性能預測進行建模,可有效預測工作過程性能。自然界中也存在類似貼裝的動作,生物通過進化出吸盤實現對復雜曲面的吸附及攀登,如壁虎吸附立面、樹蛙吸附樹枝干、魚類吸附其他魚類以及貝類吸附礁石等[15-24]。FLAMMANG等[25]針對魚吸附功能進行研究,發現魚在顱靜脈的加壓作用下,利用椎間盤吸盤器官實現對不同粗糙度表面的長期可逆附著。WANG等[26]借鑒魚吸附大魚的椎間盤器官研制出的仿生機器人具有抗拉脫、抗橫向摩擦的特點,在空氣中及水中均有良好吸取能力。KIM[27]對可吸附復雜立面實現生長的常春藤進行研究,發現枝條與墻壁接觸后,通過表皮轉化、黏合劑分泌、細胞分裂改變枝條質地從而提高附著位置機械強度,進而獲得最大吸附性能。
對以圓錐體為代表的空間復雜曲面進行表面貼裝成為熱點及難點。如導彈頭部貼裝抗高溫陶瓷防爆膜片、錐頂造型建筑表面貼裝隔熱薄膜等技術環節,多采用專用貼裝設備及人工操作,拓展性及貼裝效率難以保證。針對上述難點研發通用自動化裝備可有效解決問題。SMT技術的應用對象為平面結構,自然界吸附多為生理結構而非機械結構,因此圓錐體外表面貼裝方案設計可采用SMT技術要求并參考自然界動植物對復雜曲面吸附的實例。
本文設計出一種圓錐體外表面貼裝機械手,作為串聯式機械臂的末端執行器。通過空間分析確定圓錐體幾何特征及貼裝方式,建立工作機構動力學、運動學方程,利用遺傳算法NSGA-Ⅱ得出最佳結構尺寸值,最后通過樣機實驗驗證機械手可行并得出最佳工作控制方案。
1 空間分析及構型設計
1.1 空間分析
圖1a為圓錐體三維示意圖,圓錐體橫截面半徑沿z軸方向線性變化,因此貼裝于圓錐體外表面的膜片上弧和下弧也沿z軸方向線性變化。圖1b紅色部分為貼裝膜片機械手單次完整貼裝流程的工作空間,通過設計機械手自上而下對圓錐體外表面進行膜片分次貼裝實現1/4圓錐體外表面貼裝工作。
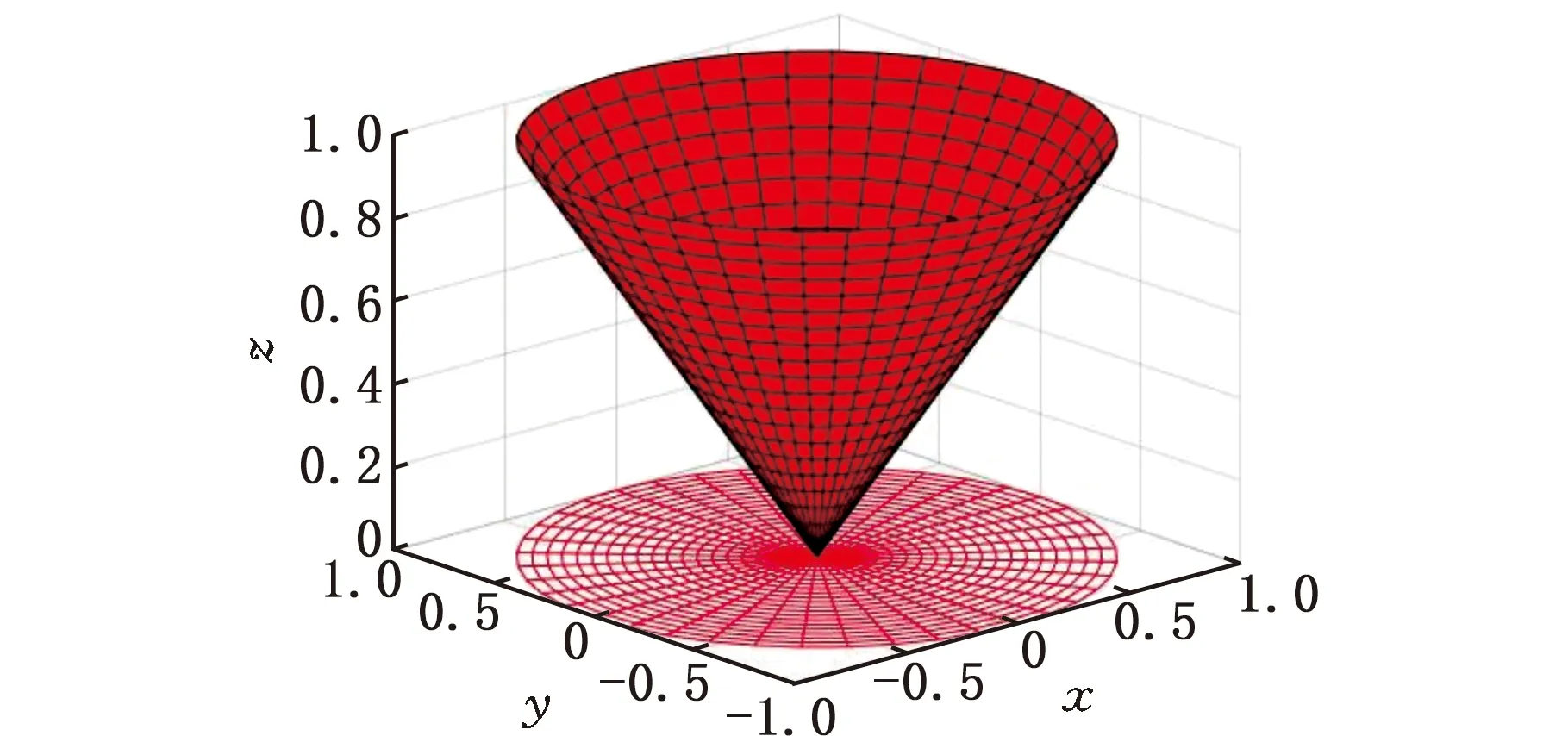
(a)圓錐體三維示意圖
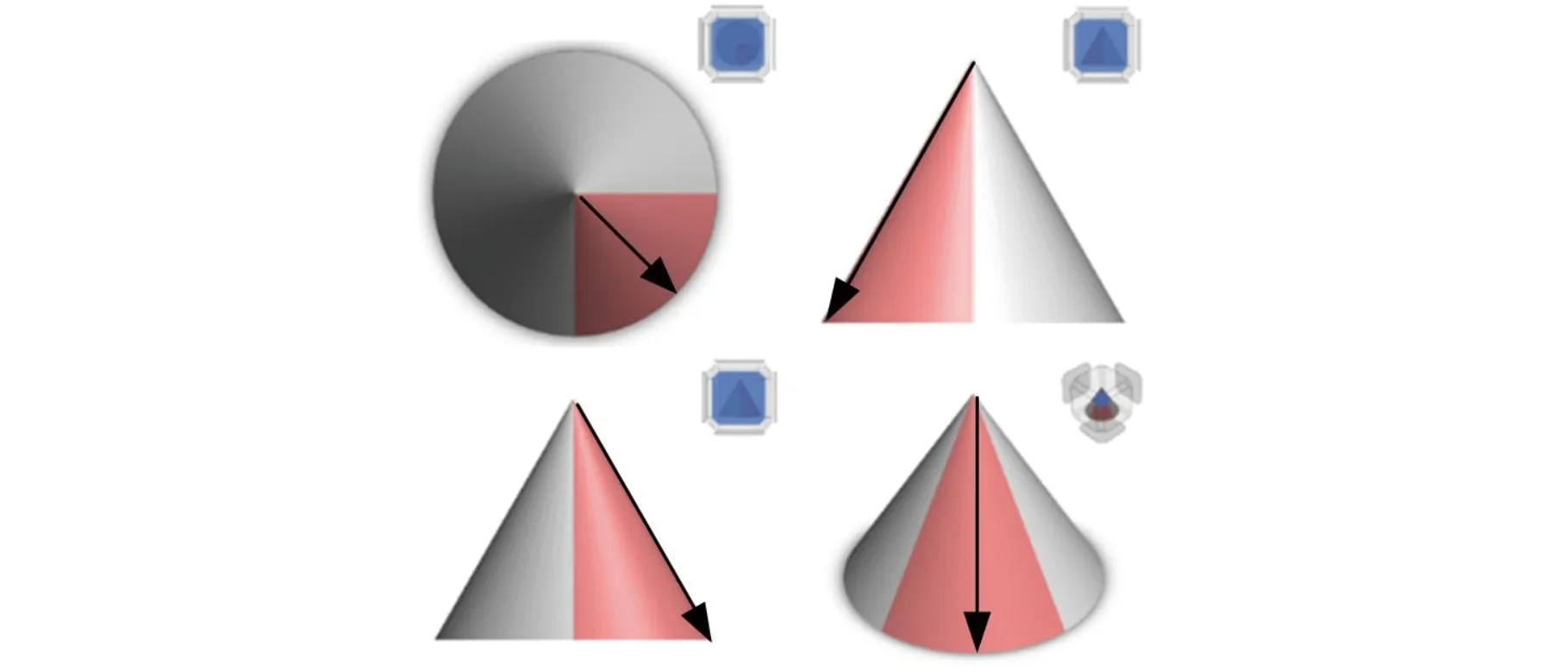
(b)單次貼裝空間圖1 貼裝工作空間Fig.1 Workplace of mounting
1.2 構型設計
根據工作動作要求提出一種新型末端機械手構型,通過6個移動副配合連桿機構實現。如圖2所示,移動副1中滑塊上固接有一根連桿作為移動副2的滑動軸,移動副2中滑塊固接有一根連桿作為移動副3中的滑動軸,移動副3與移動副4中的滑塊通過連桿固接,移動副5、移動副6為移動副3、移動副4的對稱結構。移動副1中滑塊豎直運動即可帶動移動副2、3、4、5、6中滑塊運動,其中移動副4、6中滑塊運動空間角度可根據機構設計進行調整。

圖2 機械手構型簡圖Fig.2 Schematic diagram of manipulator configuration
根據修正G-K公式可對空間機構自由度進行求解:
式中,M為自由度數;d為系統階數;n為構件數;g為運動副個數;fi為第i個運動副的自由度數;v為冗余約束個數;ζ為局部自由度。
由圖2可知,移動副5、6為移動副3、4的對稱結構,對機構運動無額外影響,因此僅分析移動副1、2、3、4組成的運動鏈,d為3,n為4,g為4,f為4,v為0,ζ為0,算得自由度M為1。
2 結構設計及理論分析
2.1 結構工作原理
根據構型設計建立末端機械手結構三維實體。如圖3所示,機械手空間結構通過6個移動副實現。連接模塊2可沿絲杠滑塊延伸出的兩根軸滑動,光軸7一端與連接模塊2固接,吸盤模塊3分別與光軸7和圓錐體母線方向導向軸6進行軸孔配合,定位架4與支承架8固接并最終連接在絲杠基座。控制絲杠滑塊沿絲杠軸上下移動,動作將經由連接模塊2、光軸7傳導至被光軸7和圓錐體母線方向導向軸6限制自由度的吸盤模塊3,使其最終沿圓錐體母線方向導向軸6上下滑動,實現圖4所示曲面包覆變構,進而實現將各圓錐體高度對應的膜片傳送至正確位置并最終通過吸盤模塊吸取壓強變化完成貼裝。
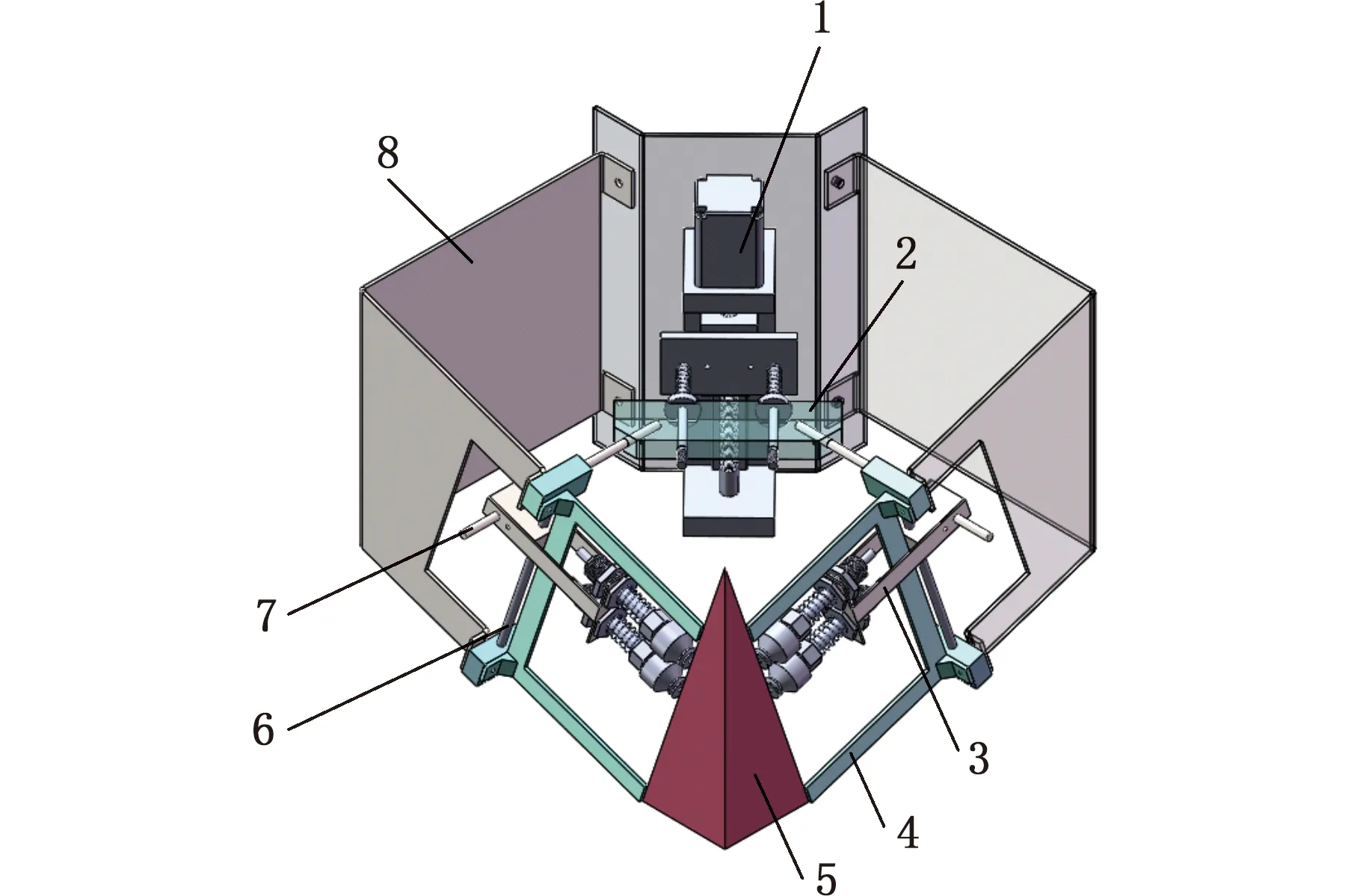
1.驅動絲杠 2.連接模塊 3.吸盤模塊 4.定位架 5.1/4圓錐 6.圓錐體母線方向導向軸 7.光軸 8.支承架圖3 機械手結構示意圖Fig.3 Structural diagram
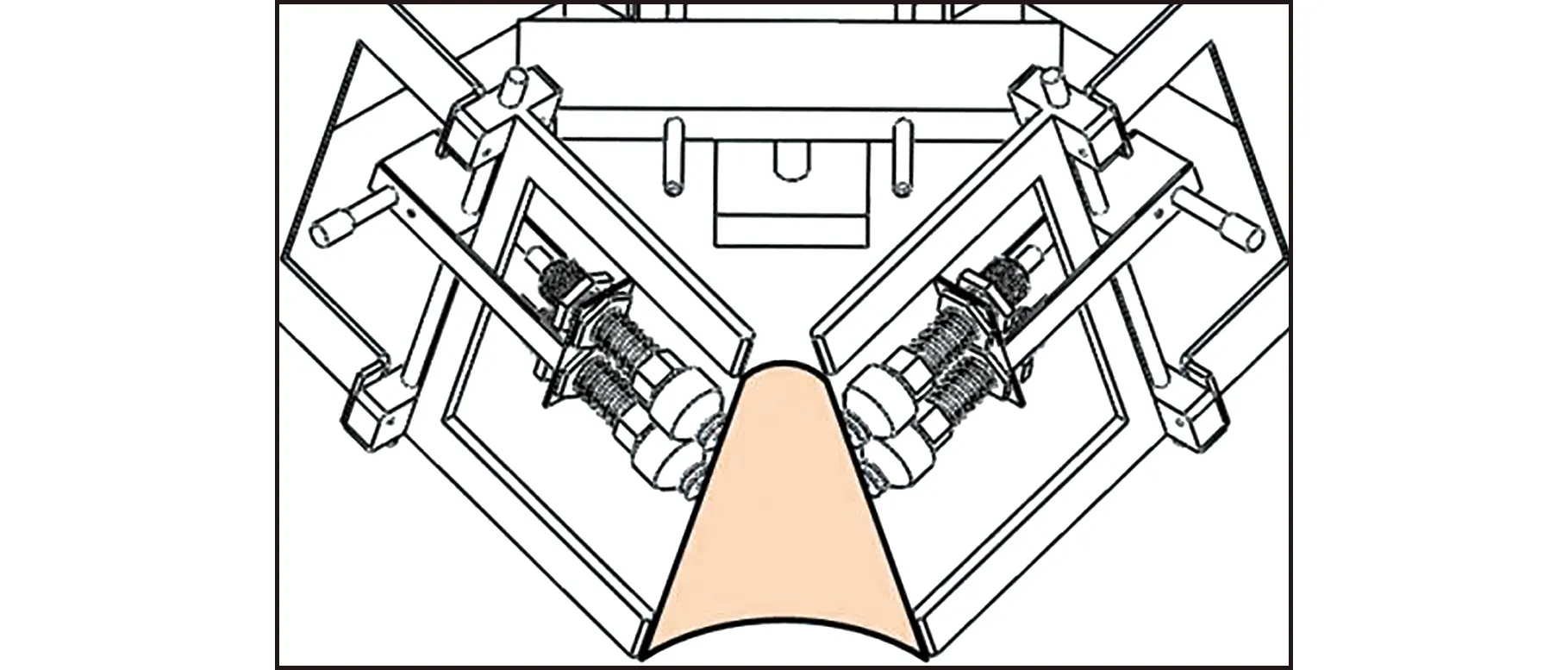
圖4 機械手工作末端Fig.4 Manipulator end
此種單自由度構型機械手的優勢如下:①精度高,不涉及多電機配合誤差;②適用性強,驅動簡單,可滿足極端使用工況;③互換性強,模塊化結構易于運維。
2.2 基于拉格朗日法的動力學分析
根據拉格朗日法構建動力學方程,如圖5所示:質點1為絲杠滑塊,質點2為連接模塊,質點3與4為連接塊且相互對稱,因此圖中只保留質點3實體。
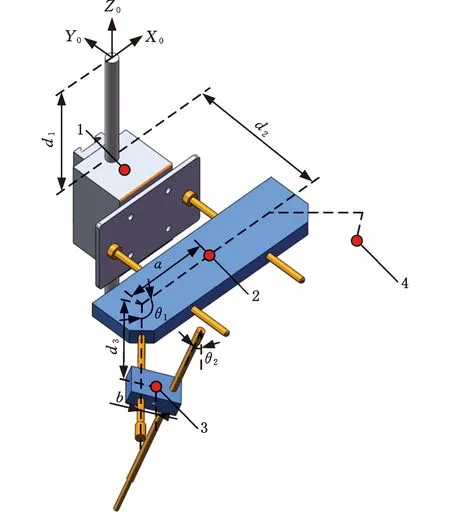
圖5 動力學分析模型Fig.5 Dynamic analysis model
首先建立質點1、2、3、4的坐標描述:
x1=0
y1=0
z1=-d1x2=0
y2=-d2
z2=-d1
x3=-a-d3cosθ1
y3=-d2-d3sinθ1
z3=-d1-bsinθ2
x4=a+d3cosθ1
y4=y3=-d2-d3sinθ1
z4=z3=-d1-bsinθ2
求得各質點速度的平方:
進而可表達出系統動能:

式中,mi(i=1,2,3,4)為質點i的質量。
系統勢能如下:

最終可得到拉格朗日函數及動力學方程表達如下:


根據動力學方程可知,機械手運動系統僅受外界輸入加速度及自身重力作用。
2.3 基于D-H法的運動學分析
根據D-H坐標建系原則可得到機械手單側坐標變換,如圖6所示,D-H參數如表1所示,進而可對機構進行正逆運動學求解。
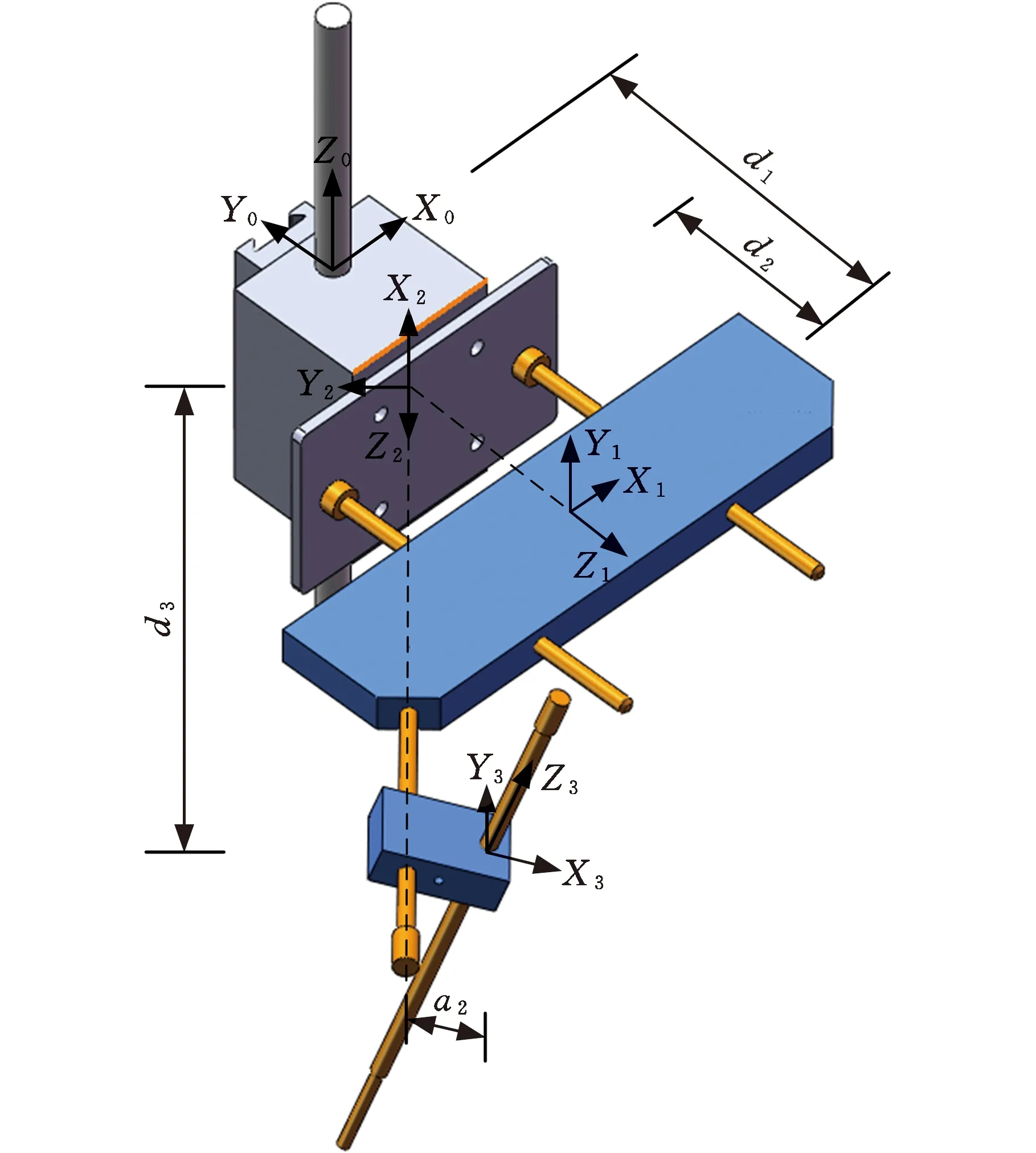
圖6 機構D-H坐標系Fig.6 D-H coordinate of device

表1 機構D-H參數表Tab.1 D-H parameter of device
根據建立的D-H坐標系及參數表可對機構由起始坐標系({0}系)至末端坐標系({4}系)進行表達。采用左乘方法,{0}坐標系沿Y軸平移-d1,并繞X軸旋轉α0,得到{1}坐標系;{1}坐標系沿Z軸平移-d2,并繞Z軸旋轉θ2,繞Y軸旋轉α1,得到{2}坐標系;{2}坐標系沿Z軸平移d3,并繞Y軸旋轉θ3,繞X軸旋轉α2,繞Z軸旋轉18.85°,得到{3}坐標系。轉換矩陣T表達式為
(1)
代入機械手結構尺寸參數可得
nx=-0.23ox=0.71ax=0
px=0.67d3-0.71d2
ny=-0.23oy=-0.71ay=0
py=0.71d2+0.67d3
nz=0.95oz=0az=0
pz=0.32d3-d1
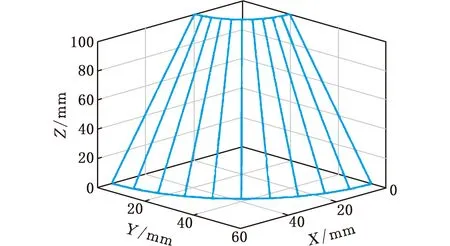
圖7 工作空間曲面Fig.7 Workspace surface
3 基于遺傳算法NSGA-Ⅱ的多目標優化
針對單一參量進行優化可根據分析目標函數尋求最優解,而針對多參量的優化往往具有多目標函數,且各目標函數中均含有待優化參量,因此需采用優化算法篩選出最優解集。遺傳算法NSGA-Ⅱ具有計算數據量小、尋優過程簡單、全局尋優能力強的特點,因此本文將采用此算法進行多目標優化。
3.1 建立目標函數
由機械手運動及受力分析可知,光軸作為中間傳動零部件是全局最大負載零件,需對其進行多目標優化進而確定滿足工作條件的最優結構尺寸。優化參數分別為光軸半徑r和光軸長度l,約束邊界條件分別為
5 mm≥r≥2 mm120 mm≥l+20≥70 mm
為保證光軸在滿足強度、剛度要求的同時體積最小,目標函數設定為光軸彎曲應力σ和體積V表達式:
f2(x)=V=r2l
式中,M(t)為彎矩;W為撓度。
3.2 優化過程及結果
在MATLAB環境下搭建NSGA-Ⅱ算法架構,設置求解參數如表2所示。求解得到f1(x)和f2(x)收斂過程如圖8所示,收斂均在20代開始趨于穩定,最終得最小彎曲應力0.002 MPa、最小體積280 mm3。對收斂過程量進行篩選可得到Pareto最優解平面,根據本文優化目標,選取圖9藍色線框內的解作為最終優化結果。在優化過程量中找到最優解對應的優化參數值,如表3所示,最終選取r=2 mm、L=70 mm作為光軸結構尺寸優化結果。
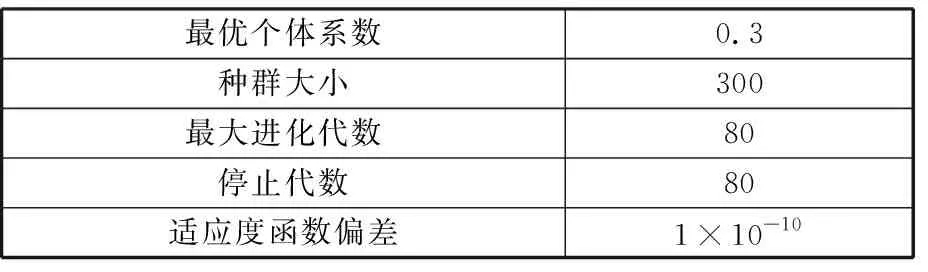
表2 計算求解參數Tab.2 Solution parameter
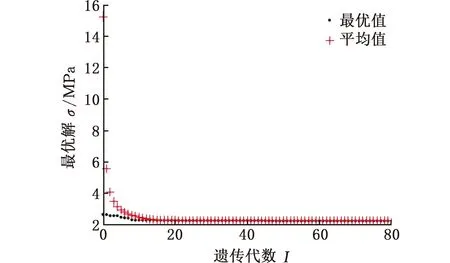
(a)f1(x)
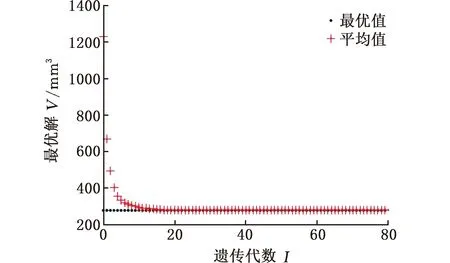
(b)f2(x)圖8 目標函數收斂過程Fig.8 Convergence of objective function
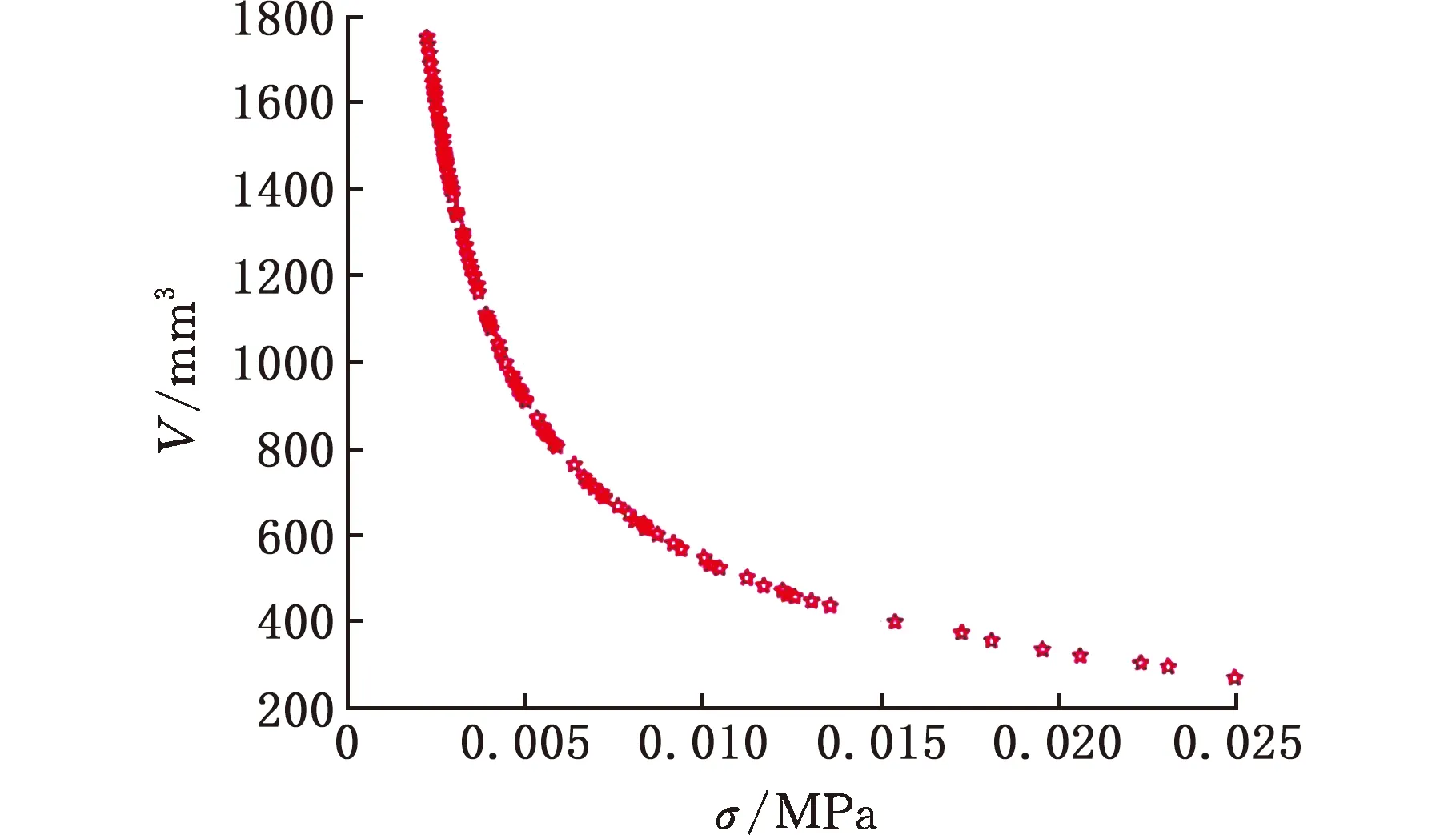
圖9 Pareto最優解平面f1(x)-f2(x)Fig.9 Pareto optimal solution plane f1(x)-f2(x)
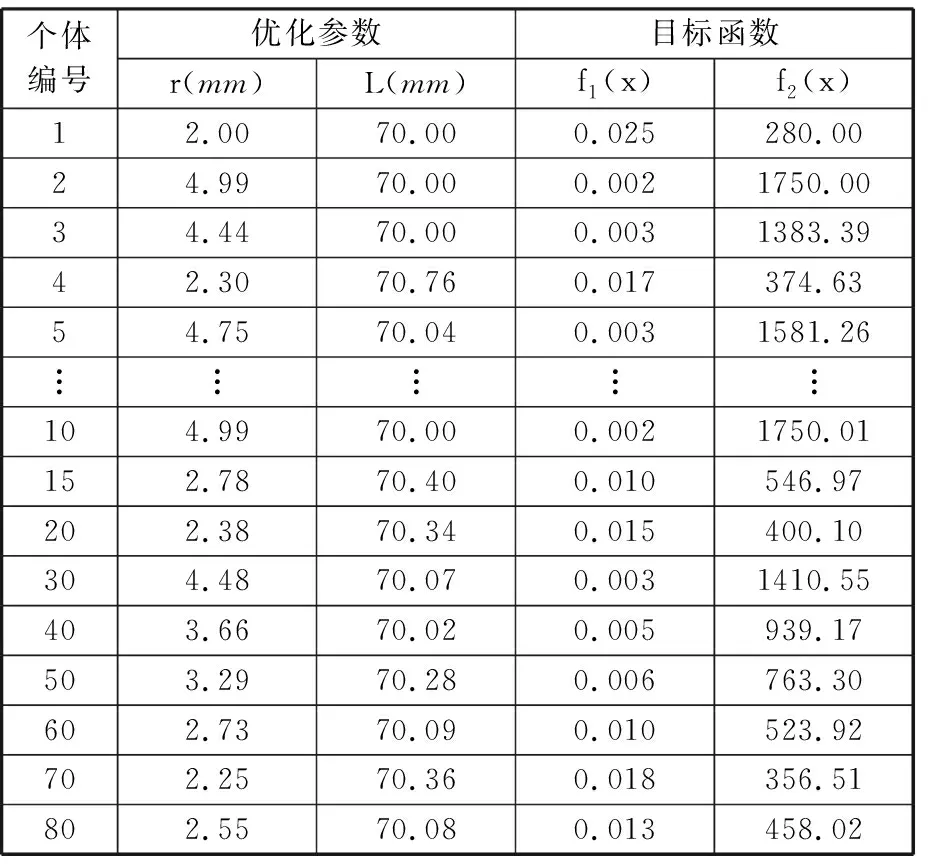
表3 優化過程Tab.3 Optimization process
光軸優化前后分別施加工作載荷并進行靜力學分析,得到形變、應力對比結果。如圖10a所示,優化后光軸沿軸向長度形變增幅相較于優化前減小,且最大形變由0.98 mm減小為0.451 mm,最大形變量減小了54.0%。如圖10b所示,優化后光軸沿軸向長度應力曲線斜率相較于優化前相近但幅值明顯減小,最大應力由121 MPa減小為91 MPa,最大應力值減小了24.8%。
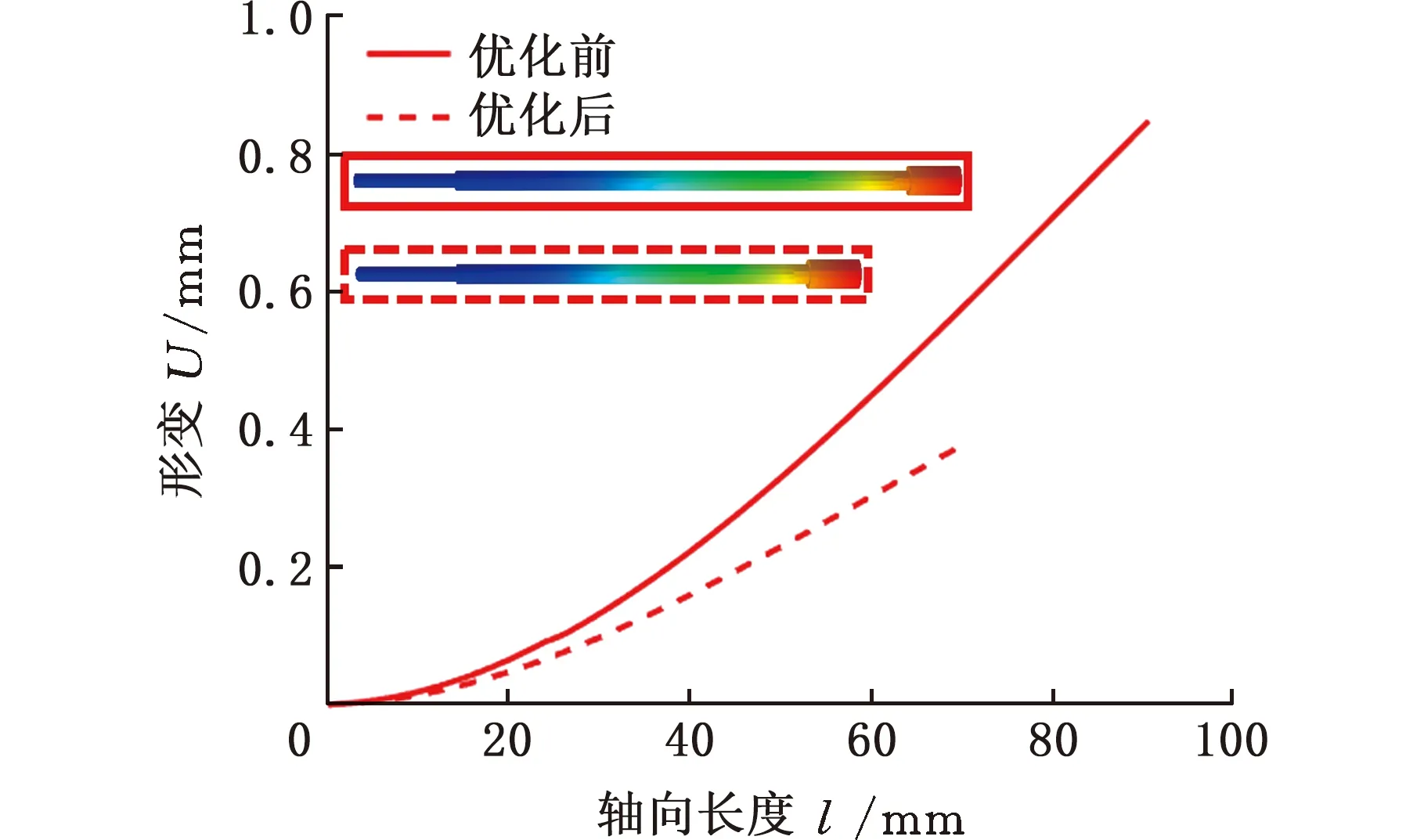
(a)形變對比
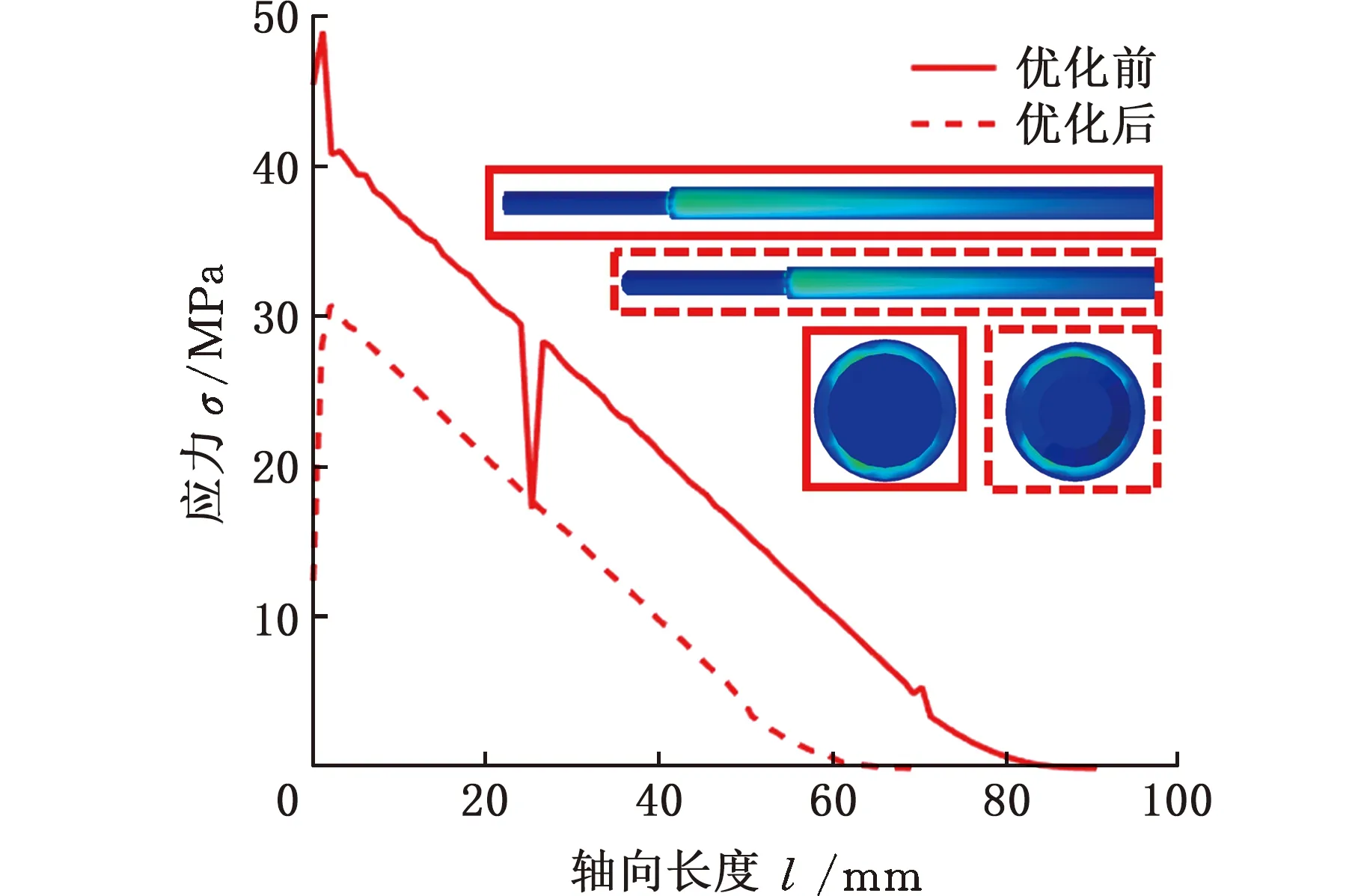
(b)應力對比圖10 優化前后對比Fig.10 Comparison before and after optimization
4 動態性能仿真及實驗對照
根據優化結果重新建立機械手模型并搭建實驗臺,將動力學仿真分析結果與實驗結果進行比對,驗證機械手的可行性。
4.1 理論模型仿真分析
ADAMS環境下的動力學分析如圖11所示,機械手簡化為5部分,絲杠軸1與絲杠滑塊2之間、絲杠滑塊2與連接塊3之間、連接塊3與吸盤模塊4之間、吸盤模塊4與吸盤模塊導向軸5之間為移動副,在絲杠軸1與絲杠滑塊2的移動副處驅動,其余移動副為自由狀態。
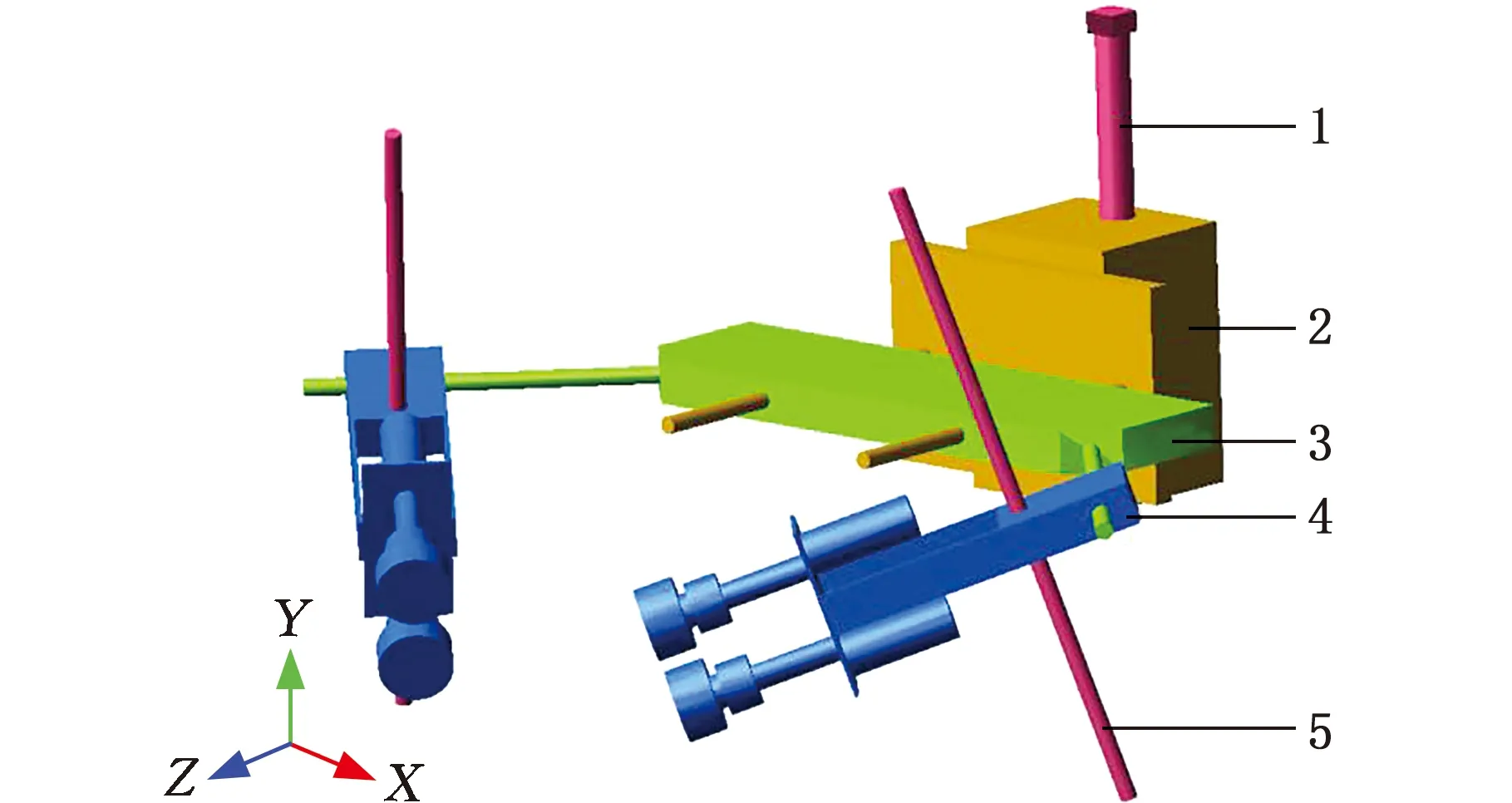
1.絲杠軸 2.絲杠滑塊 3.連接塊 4.吸盤模塊5.吸盤模塊導向軸圖11 機構簡化模型Fig.11 Simplified device model
設絲杠運動滿足理想驅動控制函數step(time,0,0,0.1,step(time,0.1,0.05,0.9,step(time,0.9,0.05,1,0))),對虛擬樣機進行仿真分析得到絲杠滑塊(吸盤模塊Y方向分量)位移、速度和加速度的絕對值變化如圖12所示:位移量變化平穩,速度在0.1 s內增至0.05mm/s,隨后保持0.9 s并于0.1 s內減速至零,啟動時刻及停止時刻產生0.6 mm/s2的加速度突變,中間無加速度產生。
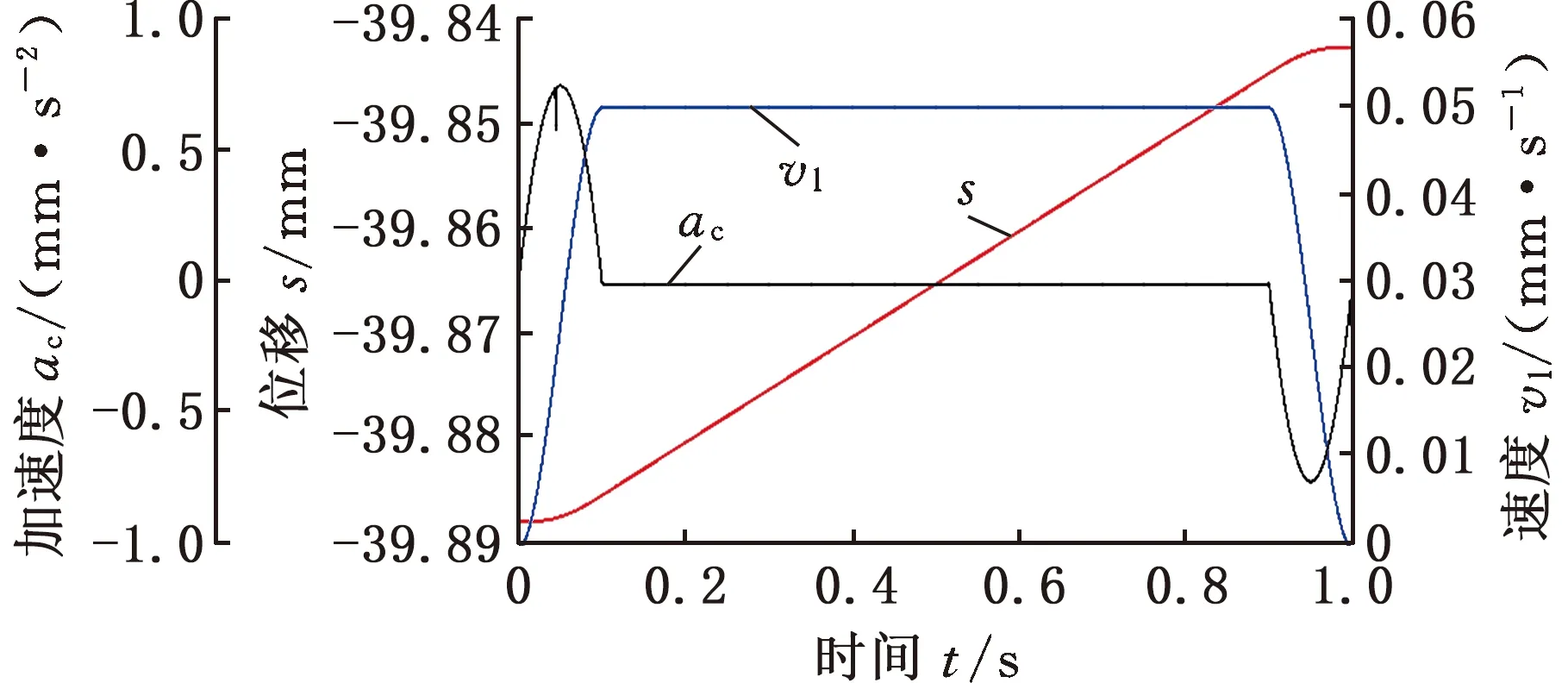
圖12 仿真位移、速度、加速度變化Fig.12 Simulation of position, velocity and acceleration
4.2 樣機試驗臺對照
搭建樣機實驗平臺如圖13所示。裝置樣機的絲杠滑塊及吸盤末端分別安裝有加速度傳感器,由PC通過藍牙對其進行數據采集;220 V交流電源對直流電源與控制器供電,直流電源為驅動器供電;驅動器對裝置樣機電機輸入脈沖實現電機旋轉運動,其中脈沖值為電機轉動一周所需電子齒輪比,可在400~25 000之間進行設置;控制器由220 V交流電源供電,可設置輸入給驅動器的單次脈沖值,進而控制裝置樣機絲杠滑塊單次移動距離。
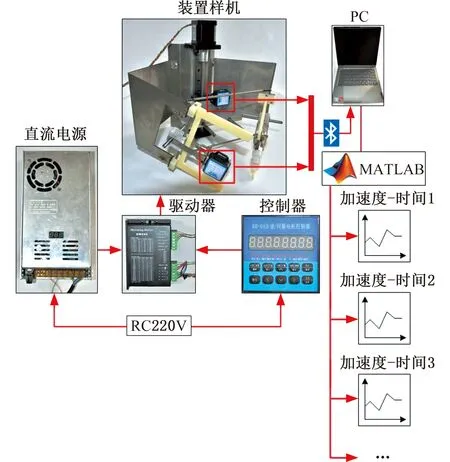
圖13 樣機控制示意圖Fig.13 Prototype control diagram
分別取電機驅動脈沖值為800、1600,輸入脈沖值分別為驅動脈沖值的1~5倍進行實驗,如表4所示。采集得到機械手加速度變化,利用經驗模態分解法(EMD)去除噪聲后得到曲線,其中圖14a、圖14b為驅動脈沖800、輸入脈沖800~4000情況下絲杠滑塊和吸盤末端加速度變化,圖15a、圖15b為驅動脈沖1600、輸入脈沖1600~8000情況下絲杠滑塊和吸盤末端加速度變化。以驅動脈沖800、輸入脈沖1600為例進行分析,記作“800~1600”,其他同理。分析結果可知,絲杠滑塊在啟動和停止時刻產生加速度最大值與最小值,運行中加速度隨電機轉動呈周期性變化。吸盤末端在啟動和停止時刻加速度變化響應時間短,由于運動經多零部件傳遞產生加速度振蕩,并于10 ms內穩定于±0.1 cm/s2內。驅動脈沖1600相較于驅動脈沖800電機具有更高的電子齒輪比,運動平順性能更好,驅動近端加速度變化更具規律性,驅動遠端加速度相應性能和變化幅值相近。

表4 驅動、輸入脈沖值Tab.4 Drive and input pulse value
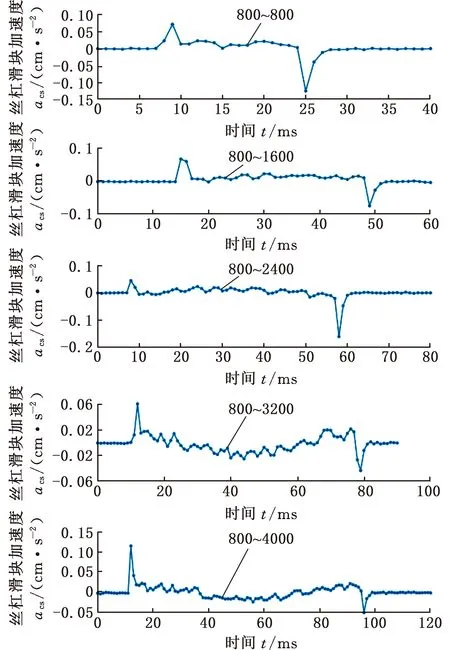
(a)驅動脈沖為800絲杠滑塊加速度
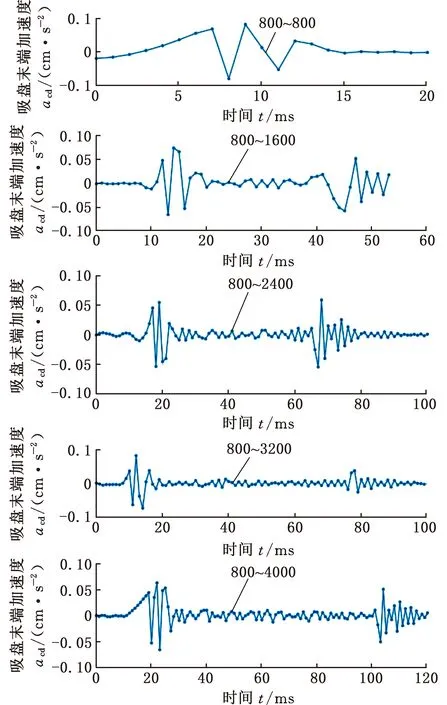
(b)驅動脈沖為800吸盤末端加速度圖14 絲杠滑塊、吸盤末端加速度(驅動脈沖值為800)Fig.14 Acceleration of screw slider and end of vacuum chuck(driving pulse is as 800)
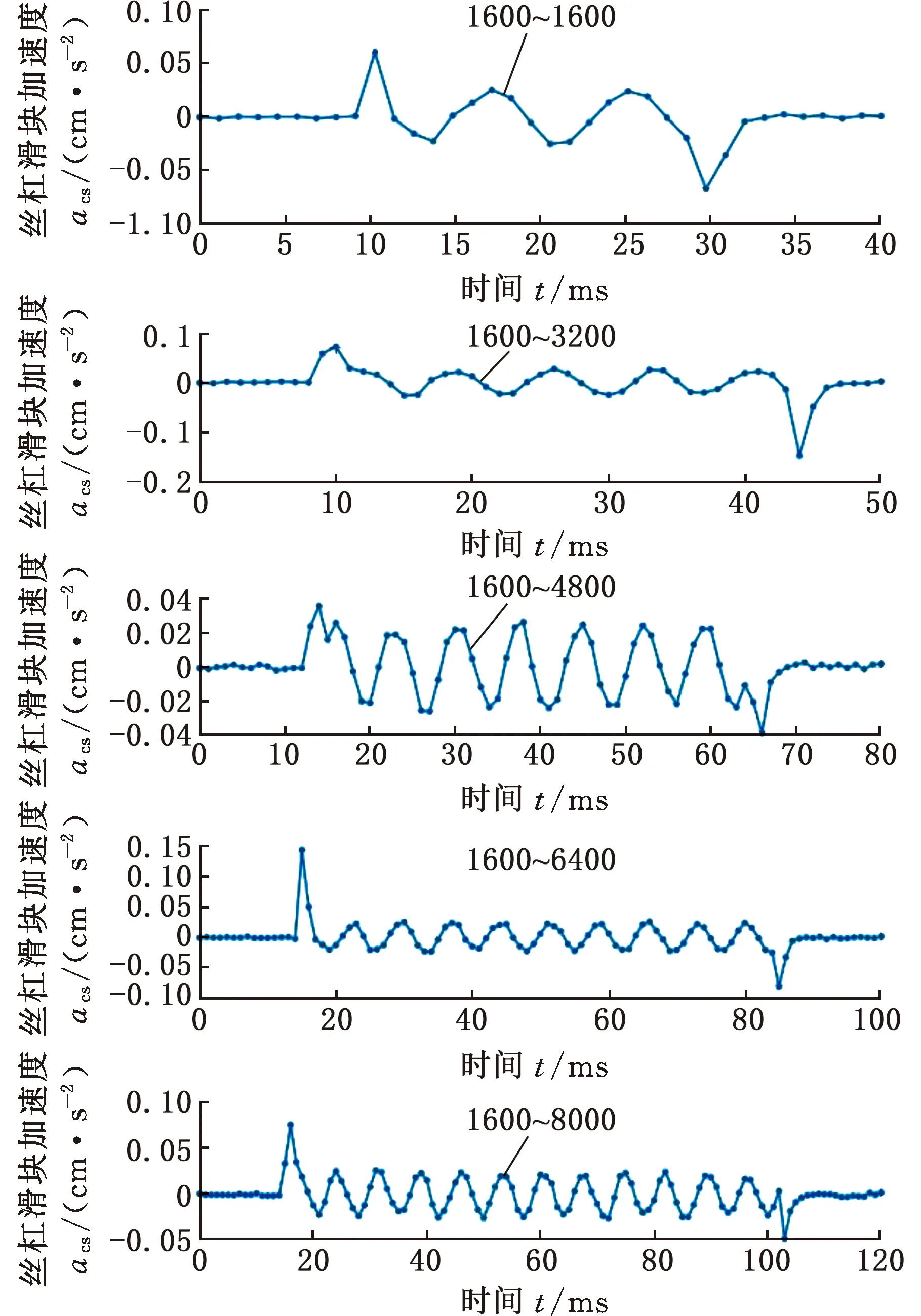
(a)驅動脈沖為1600絲杠滑塊加速度
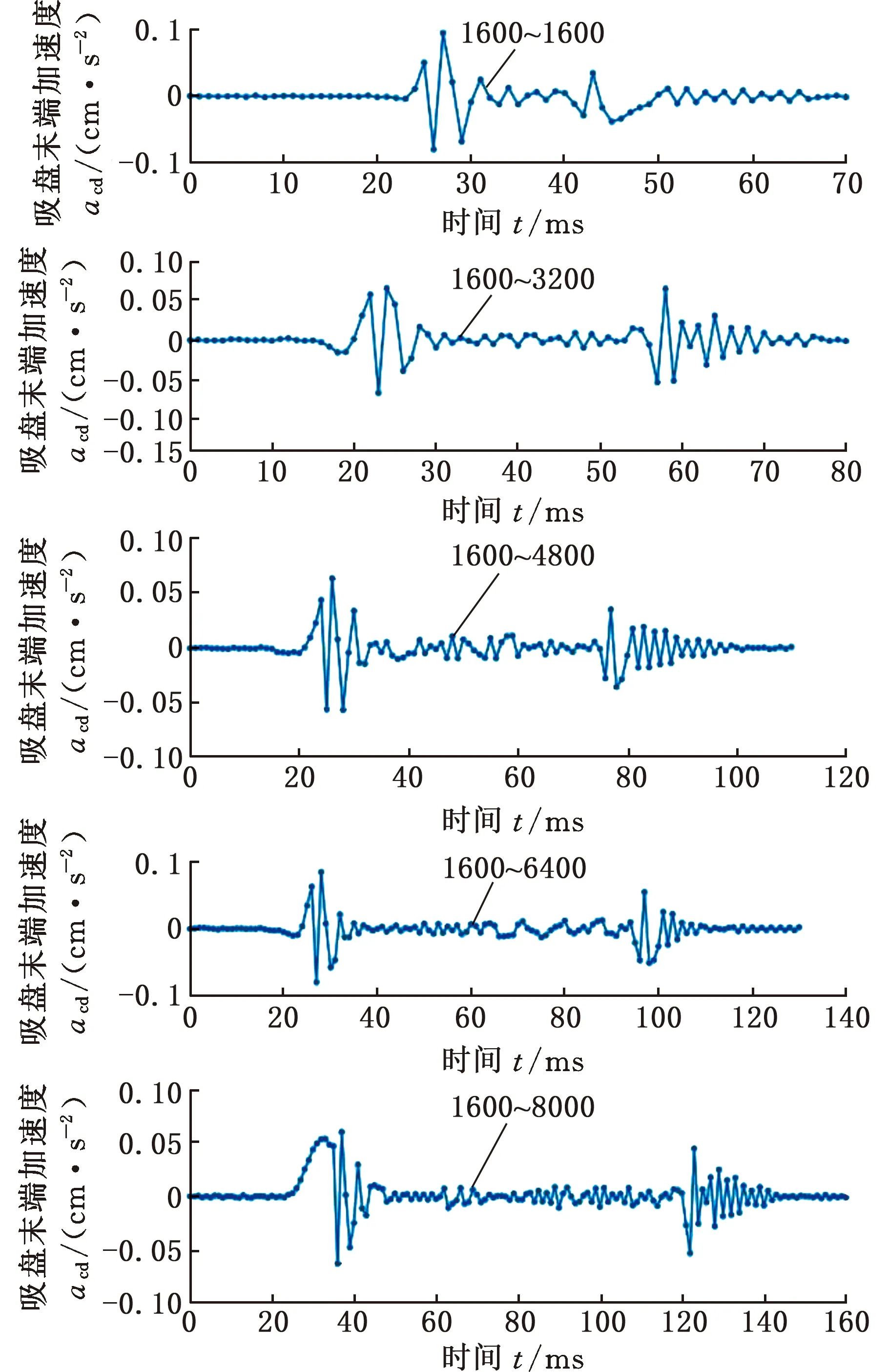
(b)驅動脈沖為1600吸盤末端加速度圖15 絲杠滑塊、吸盤末端加速度(驅動脈沖值為1600)Fig.15 Acceleration of screw slider and end of vacuum chuck(driving pulse is as 1600)
絲杠滑塊樣機運動過程中僅受電機加速度及自身重力作用可驗證2.3節理論推導,樣機相較于仿真實驗加速度變化趨勢相同,但由于驅動電機轉動產生周期性加速度變化導致中間理論勻速段相異。吸盤模塊為機械手末端,運動傳遞經過多個零件會產生振動累加,由于樣機采用304不銹鋼材質加工,因此表現出加速度幅值較小,若進一步抑制加速度振蕩幅值需增設支撐梁、連接柱等結構件。
4.3 樣機性能
利用樣機進行圓錐體外表面貼裝。如圖16所示,操作驅動絲杠使吸盤模塊沿圓錐體母線方向導向軸上下平移并進行貼裝實驗:①使吸盤模塊運動到指定貼裝位置;②接通氣泵及負壓發生器,使吸盤拾取貼裝膜片;③機械手貼合于圓錐體外表面,使膜片實現貼裝;④切斷氣泵完成貼裝,機械手脫離圓錐體;⑤更換吸盤模塊貼裝位置并再次完成①~④操作。
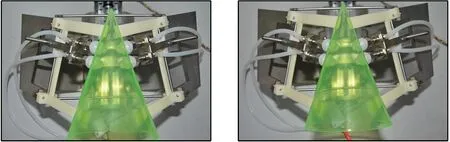
(a)第一位置 (b)第二位置

(c)第三位置 (d)第四位置圖16 機械手貼裝實驗圖Fig.16 Experiment of manipulator mounting
貼裝實驗過程中,機械手可完成圓錐體各高度位置對應的外表面貼裝。其中吸盤模塊平移運動平順穩定,吸盤對膜片的拾取精準牢固,對一側涂有膠的膜片進行貼裝時能夠準確找到貼裝位置,貼裝效果如圖17所示:膜片貼裝平整、與圓錐體外表面接觸均勻、邊角無起翹現象發生。因此經實驗驗證,本文設計的針對圓錐體外表面貼裝的末端機械手具有可行性。

(a)第一位置 (b)第二位置

(c)第三位置 (d)第四位置圖17 貼裝效果Fig.17 Effect of mounting
5 結論
本文通過對圓錐體進行幾何特征分析,設計出一種針對圓錐體外表面貼裝的串聯機械臂末端機械手。根據貼裝動作建立了機械手三維模型并分別進行構型分析、動力學分析和運動學分析。利用遺傳算法NSGA-Ⅱ對零部件結構尺寸優化,結果表明,相較于優化前,優化后部件各位置應力降低10 MPa,最大應變降低62.5%。對比虛擬樣機和樣機動態性能實驗,運動始末加速度變化趨勢基本吻合,但由于電機特性導致運動過程中會存在周期性加速度變化。單獨分析樣機實驗數據發現,驅動源伺服電機在高驅動脈沖條件下更具運動平順性且加速度變化更具規律性。
本文主要貢獻如下:
(1)提出一種針對圓錐體外表面貼裝的串聯機械臂末端機械手新構型。通過電機驅動可實現適應圓錐體不同高度下外表面貼裝的變構,本文設計為目前首個應用于空間貼裝的集成機械手結構,可簡化現有貼裝工作流程并降低工作難度,同時為后續相關研究奠定基礎并提供思路。
(2)提出一套完整、可復制的設計、分析、優化流程。本文根據對貼裝對象的分析進行結構的初步確定,通過構型分析、動力學分析和運動學分析建立理論分析模型并驗證設計可行性,最后利用遺傳算法對結構進行優化,并經生產樣機驗證所設計機械手穩定可行,為結構設計類型研究提供參考方案。
(3)根據虛擬樣機和樣機實驗分析的對比結果發現,驅動源電機會對執行器加速度變化產生影響。在零部件靜、動力學分析過程中,尤其是細長尺寸桿件、支撐件需考慮驅動源作用,并可將驅動電機對零部件的影響程度作為選取驅動電機的標準和依據。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
