APF有源電力濾波器分析及控制方法綜述
2023-01-11 04:54:26蔣正榮李童雪
電子制作 2022年22期
關鍵詞:控制策略
蔣正榮,李童雪
(北方工業(yè)大學 電氣與控制工程學院,北京,100144)
0 引言
隨著電力電子技術(shù)的發(fā)展,電力電子設備被廣泛應用于電力工業(yè)中,然而,作為非線性負載的電力電子設備產(chǎn)生了大量的諧波與無功[1],與此同時,高精密的電子儀器與對電源對電網(wǎng)質(zhì)量的要求也越來越高,有源電力濾波器的出現(xiàn),有效地彌補了無源濾波器所具有的只針對特定次諧波有效,受系統(tǒng)阻抗變化影響大且易引發(fā)諧振的缺點,能夠?qū)μ囟ù沃C波和無功電流進行跟蹤和補償,是一種理想的改善電能質(zhì)量的裝置,近年來引起了廣泛關注。
1 APF的基本工作原理
由于串聯(lián)有源濾波器存在絕緣度高、難以適應線路故障條件以及無法進行無功功率動態(tài)補償?shù)娜秉c[2],目前使用的多為并聯(lián)型APF。并聯(lián)型APF系統(tǒng)的結(jié)構(gòu)如圖1所示。圖中,負載為諧波源,變流器與其相連的電感和直流側(cè)儲能元件共同構(gòu)成APF的主電路。并聯(lián)型APF可以跟蹤諧波源產(chǎn)生的諧波電流,并生成與之相反的補償電流,適用于補償電流型諧波源。
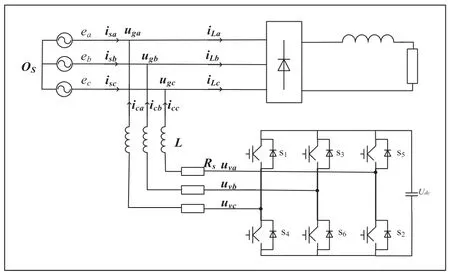
圖1 并聯(lián)型APF結(jié)構(gòu)圖
但在APF運行過程中,會產(chǎn)生與補償電流開關頻率附近的諧波,目前,APF的通常采用L型濾波器,L型濾波器雖然結(jié)構(gòu)簡單控制方便,但其濾波效果受電感值的大小影響,當對波形質(zhì)量要求較高時,只能增加電感值,但電感值的增加會導致體積增加和成本上升,也會產(chǎn)生額外的損耗。因此,LCL型濾波器開始被應用。與L型濾波器相比,LCL型濾波器在頻率越高的情況下,阻抗越小,因此可以更好地抑制高頻諧波分量。為此,當濾除諧波含量相同的情況下,LCL型濾波器與L型濾波器相比,可以降低總的電感取值,節(jié)約成本且降低裝置體積[3]。
LCL濾波器作為一個三階系統(tǒng),其缺陷在于,其含有的諧振尖峰會導致系統(tǒng)產(chǎn)生振蕩現(xiàn)象,為保證系統(tǒng)能夠穩(wěn)定可靠工作,需要通過改變LCL型濾波器的支路結(jié)構(gòu)或者利用控制框圖等效法在控制策略中實現(xiàn)等效阻尼來抑制LCL型濾波器的諧振尖峰,分別稱之為無源阻尼和有源阻尼技術(shù)[4]。
無源阻尼是通過在LCL電容支路引入無源元件,從而達到使系統(tǒng)穩(wěn)定的目的。其優(yōu)點是方法簡單,穩(wěn)定可靠,但由于無源元件的加入,使得系統(tǒng)的損耗增大。有源阻尼是通過改進控制算法,實現(xiàn)阻尼的效果,繼而消除由LCL型濾波器引起的系統(tǒng)諧振。目前有源阻尼的控制方法有狀態(tài)變量反饋法,虛擬電阻法等。
此外,為了進一步提高波形質(zhì)量,提高裝置的經(jīng)濟性,文獻[5]提出了一種LLCL型濾波器,在LCL型濾波器的濾波電容支路上,串入了一個小電感,從而實現(xiàn)電容支路以在開關頻率處的串聯(lián)諧振。文獻[6]提出一種LCCL型濾波器,在網(wǎng)側(cè)電感支路,將一個小電容與網(wǎng)側(cè)電感并聯(lián),利用網(wǎng)側(cè)電感與該并聯(lián)電容在開關頻率處產(chǎn)生的并聯(lián)諧振,抑制開關頻率附近的諧波,與LLCL型濾波器相比,LCCL型濾波器可以更好地實現(xiàn)抑制參數(shù)變化。同時,在設計基于電容電流反饋法有源阻尼的控制時,LCCL型濾波器比LLCL型濾波器更加合理。
2 并聯(lián)型APF拓撲分類
變流器作為APF的核心部件,其拓撲結(jié)構(gòu)的研究是APF研究領域的重要組成部分,目前主要分為:兩電平,三電平,多電平等。
2.1 兩電平
圖2為兩電平變流器的結(jié)構(gòu)圖。通過三組開關器件的通斷組合,控制直流側(cè)的電容電壓,將其與交流測電源電壓的差值作用在電感,得到補償電流。兩電平變流器具有結(jié)構(gòu)簡單,成本低的優(yōu)點,但輸出的電流紋波較大,不適用于高電壓大功率場合。
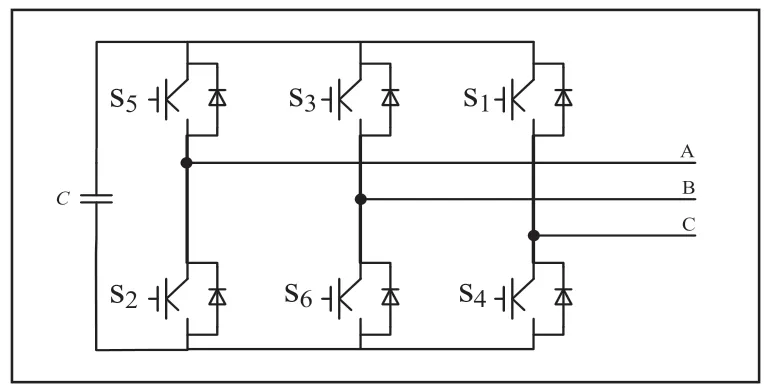
圖2 兩電平拓撲結(jié)構(gòu)圖
2.2 三電平
與兩電平變流器相比,三電平變流器具有器件開關頻率低,損耗少的優(yōu)點,有效地提高了APF的電壓等級和輸出電流的波形質(zhì)量。目前,三電平變流器包括二極管鉗位型,T型,飛跨電容型,H橋級聯(lián)型等。
圖3所示為二極管鉗位型的結(jié)構(gòu)圖,每相橋臂增加一對鉗位二極管,每一對二極管的中點與直流側(cè)電容中點相連,但是,一些開關狀態(tài)會使電流流入或流出中點,會造成中點電位不平衡的問題[1]。
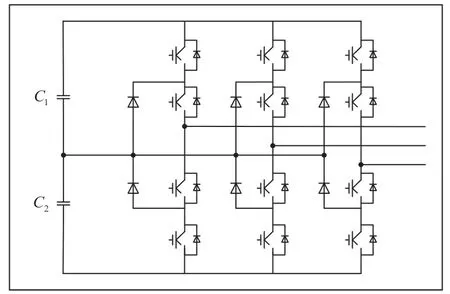
圖3 二極管鉗位型拓撲結(jié)構(gòu)圖
目前,中點電位控制的主要方法有:載波調(diào)制算法,空間電壓矢量調(diào)制算法和虛擬空間矢量調(diào)制算法。文獻[7]提出了一種基于載波調(diào)制的中點電位平衡控制策略,首先,根據(jù)電流和調(diào)制電壓得到零序電壓,注入電流環(huán)輸出的調(diào)制波,再將其與載波比較,得到驅(qū)動相對應的開關管的驅(qū)動波,確定相應的零電平的時間,從而實現(xiàn)對中點電流的控制。相較于空間矢量調(diào)制,該方法沒有復雜的分區(qū)和計算,易于實現(xiàn)。文獻[8]提出了一種基于空間電壓矢量調(diào)制算法的中點電位平衡控制策略。已知大矢量和零矢量對中點電位平衡沒有影響,正負小矢量對中點電位的影響可以互補。所以可以通過引入平衡因子,根據(jù)當前的中點電位偏差,調(diào)節(jié)小矢量的作用時間,實現(xiàn)中點電位平衡。文獻[9]在虛擬空間矢量調(diào)制算法的基礎上,通過零矢量、中矢量和大矢量對虛擬小矢量和中矢量重新定義,使得到的虛擬矢量產(chǎn)生的共模電壓為傳統(tǒng)虛擬空間矢量調(diào)制算法產(chǎn)生的共模電壓的二分之一,再通過選取虛擬中矢量分配系數(shù)的最優(yōu)值,使虛擬矢量產(chǎn)生的中點電流向減小中點電壓波動的方向流動。
圖4所示為T型拓撲。T型逆變器的每相橋臂通過反向串聯(lián)的開關管來實現(xiàn)中電鉗位,使其輸出電壓具有三種電平,該拓撲與二極管鉗位型相比,免去了鉗位二極管,所以器件更少,損耗更小,輸出電壓諧波更小,有效地提高了逆變器的效率,節(jié)約了成本[10]。
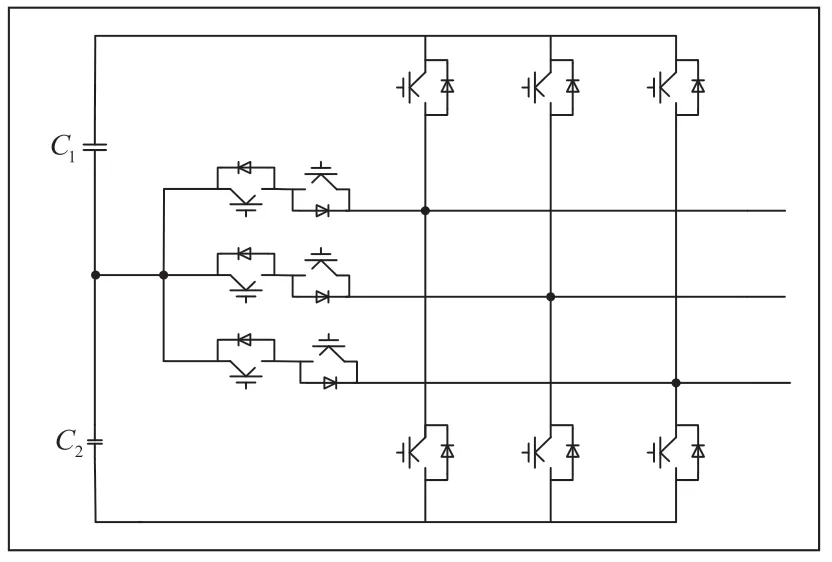
圖4 T型拓撲結(jié)構(gòu)圖
現(xiàn)在,有一種三相兩橋臂的拓撲被應用于電力電子設備,在這種拓撲結(jié)構(gòu)的基礎上,許多不同的調(diào)制策略和控制方案被應用,可以實現(xiàn)相同目的下更緊湊的設計[11]。與傳統(tǒng)三電平拓撲相比,減少了四個開關器件,因此可以省去四個驅(qū)動電路,傳導損耗也可以減少為原來的三分之二。
圖5所示為飛跨電容型拓撲。飛跨電容型逆變器通過直流側(cè)上下兩個電容的串聯(lián)進行鉗位,但是對于高壓系統(tǒng)而言,大量電容的使用會增加系統(tǒng)成本,而且電容具有使用壽命短,可靠性差的缺點,所以其實際應用并不廣泛。

圖5 飛跨電容型拓撲結(jié)構(gòu)圖
圖6所示為級聯(lián)型拓撲[12]。與前面幾種拓撲結(jié)構(gòu)相比,級聯(lián)型拓撲沒有中性點電位不平衡的問題,因此不需要鉗位二極管和飛跨電容來實現(xiàn)中性點電位控制,降低了成本,目前已經(jīng)成為三電平APF的研究重點。

圖6 級聯(lián)型拓撲結(jié)構(gòu)圖
2.3 多電平
圖7所示為模塊化多電平拓撲。模塊化多電平(MMC)是一種基本的多電平電路,與其他多級電路相比,它具有更高的模塊化、更低的輸出THD和更高的電壓可擴展性等優(yōu)點。MMC每相分為上下兩個橋臂,每個橋臂都由n個子模塊和用于限制短路沖擊電流和相間環(huán)流的電感L組成。文獻[13]以MMC拓撲為基礎,提出了一種改進的無負載并聯(lián)型有源濾波器預測諧波電流控制(PHCC)方法。控制算法由有功/無功功率控制和預測諧波控制組成,它既能使電壓穩(wěn)定相等,又能實現(xiàn)諧波濾波。

圖7 多電平拓撲結(jié)構(gòu)圖
3 APF關鍵性技術(shù)
3.1 諧波電流檢測技術(shù)
諧波電流檢測是APF諧波補償技術(shù)的關鍵環(huán)節(jié),應用于APF的諧波檢測方法分為時域和頻域兩類:
3.1.1 時域法
目前廣泛采用的時域法是基于瞬時無功理論的p-q法和ip-iq法,p-q法通過采樣網(wǎng)側(cè)的三相電壓和電流,經(jīng)過Clark變換得到eα、eβ和iα、iβ,得到三相電路的此刻的有功功率和無功功率,經(jīng)過低通濾波器獲得直流分量由于p為基波有功電流與電壓作用產(chǎn)生,q為基波無功電流與電壓作用產(chǎn)生,所以可由此得到電流的基波分量,再通過Clark反變換,即可得到三相電流的基波分量和諧波分量。ip-iq法則需要用到鎖相環(huán)(PLL)和一個正余弦發(fā)生電路,得到與eα同相的相位信號,再根據(jù)定義可以得到三相電路的瞬時有功電流ip和無功電流iq,經(jīng)過低通濾波器獲得直流分量,再通過Clark反變換,即可將電流的基波分量和諧波分量分別提取出來。但由于ip-iq法需要用到鎖相環(huán)和正余弦發(fā)生電路,其檢測精度會受到鎖相環(huán)的輸出相位誤差的影響,而且低通濾波器會導致時間延遲,因此文獻[14]在ip-iq法的研究基礎上,針對鎖相環(huán)精度造成誤差和低通濾波器引起延遲的問題,提出了一種改進的無鎖相環(huán)的諧波檢測方法,采用能實現(xiàn)加快系統(tǒng)動態(tài)響應和提高對特征次諧波的濾除效果的滑動平均濾波器代替?zhèn)鹘y(tǒng)的低通濾波器,與ip-iq法檢測相比,此方法精度和響應速度都有所提升。
3.1.2 頻域法
頻域法主要在傅里葉分析的基礎上得來的離散傅里葉變換(DFT),快速傅里葉變換(FFT),和滑窗迭代DFT,頻域分析的方法可以選擇性消除所需的任意諧波次數(shù)。一般情況下,DFT比FFT的計算量要大,但在應用于APF時,更多的是用于特定次諧波的選擇,DFT可以單獨計算特定次諧波,而FFT需要計算全部頻譜后才能獲得所需的部分頻譜,所以在實際應用時,DFT的計算量會小于FFT。DFT與FFT相比,變換點數(shù)或采樣率選擇更靈活、實時性更好。滑窗迭代比DFT的實時性更好,每一次采樣,滑窗迭代DFT都會加上最新數(shù)據(jù)減去上個周期的舊數(shù)據(jù),相當于每次都做一個DFT,因為只涉及幾個加減和簡單的乘法運算,所以計算時間短,實時性好[15]。
3.2 電流跟蹤控制技術(shù)
3.2.1 PI控制
PI控制可以實現(xiàn)對直流信號的無靜差跟蹤,但是由APF的原理可知,其參考信號為一系列不同頻率的諧波,傳統(tǒng)的PI控制器增益和控制帶寬有限,參數(shù)無法實時調(diào)整,導致補償精度會受到影響,所以,目前的改進策略是將PI控制與其他控制方法結(jié)合。 文獻[16]給出了一種BP神經(jīng)網(wǎng)絡遞推積分PI-重復控制策略,在傳統(tǒng)PI控制算法的基礎上,引進BP神經(jīng)網(wǎng)絡算法和遞推積分函數(shù),通過BP神經(jīng)網(wǎng)絡自學習及不斷調(diào)節(jié)權(quán)值,跟蹤誤差變化實時調(diào)節(jié)PI控制參數(shù),彌補了PI控制不能實時調(diào)整參數(shù)的缺陷,進而滿足最優(yōu)化要求。
3.2.2 PR控制
為了實現(xiàn)不同頻率的諧波補償,PR控制被應用于APF的控制中,由于PR控制在諧振頻率處的增益表現(xiàn)為無窮大,所以PR控制可以選擇性的對不同頻率的諧波進行補償,但是當需要補償?shù)闹C波次數(shù)較多時,其補償帶寬不足。文獻[17]提出了一種改進的準PR控制器,準PR控制器增益由Kr決定,通過調(diào)節(jié)Kr,可以使其有足夠大的增益,從而保證高精度的指令跟蹤,與傳統(tǒng)的PR控制器相比,增加了補償帶寬,提高了系統(tǒng)抗電網(wǎng)波動的能力,同時在控制器中增加積分環(huán)節(jié),有效地提高了低頻增益。
3.2.3 滯環(huán)控制
滯環(huán)控制是一種非線性控制方法,其原理是通過滯環(huán)比較器將電流誤差經(jīng)過比較后輸出。滯環(huán)控制器結(jié)構(gòu)簡單,動態(tài)響應快,且具備較強的抗干擾性能,但系統(tǒng)的補償精度和開關頻率會受到滯環(huán)比較器環(huán)寬的影響。為了改善上述問題,提出了定頻滯環(huán)控制[18],用一組滯環(huán)比較器判斷參考電壓矢量的區(qū)域,從而選擇優(yōu)化電壓矢量去控制電流,但其受諧波影響較大,電流控制誤差較大,且補償效果較差,因此文獻[19]提出了一種基于混沌算法的電力濾波器定頻滯環(huán)電流控制,利用混沌算法遍歷性、隨機性以及全局性的特征,為定頻滯環(huán)電流控制提供更加精準的分析數(shù)據(jù)。與傳統(tǒng)方法相比,該方法誤差較小,補償效果以及開關頻率控制效果較好。
3.2.4 重復控制
重復控制是在內(nèi)模原理的基礎上提出的,該控制策略可以無靜差的追蹤周期信號,具有結(jié)構(gòu)簡單,運算量小的優(yōu)點,但是重復控制需要加入一個延遲環(huán)節(jié)從而在特定頻率處取得較高增益,所以其動態(tài)性能較差,文獻[20]提出了一種雙閉環(huán)PI+重復控制的復合控制策略,可以有效地解決重復控制動態(tài)性能較差的問題。
3.2.5 滑膜控制
滑膜控制是一種非線性控制方法,該控制策略可以在系統(tǒng)在運行的同時,根據(jù)系統(tǒng)的實時運行狀態(tài)做出調(diào)整,從而使系統(tǒng)運行在既定的軌跡上,具有響應速度快,受系統(tǒng)參數(shù)影響小的優(yōu)點,但是當系統(tǒng)的運行軌跡到達滑模面時,會產(chǎn)生抖振問題。針對上述問題,文獻[21]提出了一種滑模變結(jié)構(gòu)的新型控制策略,采用變指數(shù)趨近率的方法,對APF進行了離散化處理,實現(xiàn)了對三電平APF的電流的實時控制,并降低了抖振問題造成的影響。
3.2.6 預測控制
預測控制是通過采集當下時刻的狀態(tài)信號,來預測下一時刻的控制信號,選擇最有效的電壓矢量,從而使系統(tǒng)獲得最優(yōu)控制,具有良好的動態(tài)性能。根據(jù)優(yōu)化方法的不同,模型預測控制主要分為兩大類:有限集模型預測控制和連續(xù)集模型預測控制。
連續(xù)集模型預測控制需要加入PWM調(diào)制器,很難實現(xiàn)對開關頻率的優(yōu)化控制,且控制目標單一。有限集模型預測控制不含有PWM調(diào)制器,因此能夠?qū)崿F(xiàn)對開關頻率的控制,而且可以通過引入權(quán)重因子實現(xiàn)多目標控制。有限集模型預測控制可以分為:單矢量,雙矢量和多矢量。傳統(tǒng)的單矢量有限集模型預測控制存在電壓矢量方向固定、幅值固定、尋優(yōu)次數(shù)少等問題,控制后電流的脈動依然很大。針對這一問題,文獻[22]提出了在一個開關控制周期內(nèi)使用一個非零矢量和零矢量組合替代傳統(tǒng)的單一矢量,并推導了占空比計算公式,提出一種計算非零矢量和零矢量的作用時間的簡單方法,與傳統(tǒng)的單矢量模型預測控制相比,在相同采樣頻率下,該方法可以獲得更低的功率脈動和諧波含量。文獻[23]提出了一種三矢量模型預測功率控制,通過構(gòu)建預測功率模型,在每個控制周期進行兩次電壓矢量選擇,首先選定第一個最優(yōu)電壓矢量,然后再從相鄰的有效電壓矢量中選取兩個,再連同零矢量與第一個最優(yōu)電壓矢量分別組合,合成期望電壓矢量,將這兩個電壓矢量代入價值函數(shù),選取最優(yōu)解,最后將得到的最優(yōu)電壓矢量進行空間矢量調(diào)制得到驅(qū)動信號,在相同開關頻率下,改善了系統(tǒng)的穩(wěn)態(tài)性能,提高了電流質(zhì)量和控制精度。
4 總結(jié)
本文主要從拓撲結(jié)構(gòu),諧波檢測,控制策略三個方面對并聯(lián)型APF目前的研究現(xiàn)狀進行了歸類和分析,得出了以下結(jié)論:
(1)在開關頻率相同時,三電平輸出的電流紋波更小,補償性能更優(yōu)越,但三電平拓撲存在中點電位不平衡的問題是當前三電平APF需解決的關鍵性問題及難點。
(2)諧波檢測是APF的重要環(huán)節(jié),因此,提高諧波檢測的精度和實時性,可以有效提高APF的補償效果。
(3)針對單一控制策略不同的優(yōu)點和缺點,復合控制通過綜合不同控制方法的優(yōu)點,對單一控制策略的缺點進行改善,提高系統(tǒng)靜態(tài)及動態(tài)特性,成為當前的研究熱點。
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36