基于FSR壓力傳感器的坐姿狀態(tài)檢測系統(tǒng)的設(shè)計(jì)
2023-01-11 04:52:18牛慧暉
電子制作 2022年22期
牛慧暉
(山東科技大學(xué),山東青島,266590)
0 引言
坐立姿勢(坐姿)是學(xué)生群體一天內(nèi)工作和學(xué)習(xí)內(nèi)絕大部分時(shí)間所處的狀態(tài)。坐姿正確地保持不僅能夠預(yù)防慢性疾病的出現(xiàn),而且還能夠提高工作和學(xué)習(xí)的效率[1]。但是,在面對沉重的學(xué)習(xí)負(fù)擔(dān)的情況下,長時(shí)間的坐立狀態(tài)使得身體的各個(gè)部位會產(chǎn)生不適的感覺,學(xué)生不得不調(diào)整自己的坐姿來舒緩疲憊[2]。在這個(gè)調(diào)整過程中人們很難一直保持正確的坐姿,會出現(xiàn)頭部傾斜、軀干彎曲等不良坐姿的表現(xiàn)。隨著時(shí)間的推移,不良坐姿引起的一連串的“職業(yè)病”對學(xué)生族的身體健康造成了危害,也影響著他們的正常生長發(fā)育。當(dāng)前,為了更有效地降低因不良坐姿帶來的消極影響,研究人員開展了坐姿檢測領(lǐng)域的相關(guān)研究。通常采用的技術(shù)路線主要是兩種,一是基于攝像頭的視頻圖像識別技術(shù),該方式識別效果好,設(shè)備簡單,但是存在易空間干擾、數(shù)據(jù)處理復(fù)雜、實(shí)時(shí)性差,同時(shí)存在一定的隱私泄密問題[3~4]。二是基于可穿戴設(shè)備的識別技術(shù),這種方式具有應(yīng)用簡單、信息處理速度快等特點(diǎn),能夠一定程度上地減小了隱私的侵入性[5~6]。綜上所述,本文考慮系統(tǒng)的實(shí)用性和實(shí)時(shí)性,提出了一種基于柔性FSR壓力傳感器的坐姿實(shí)時(shí)檢測系統(tǒng)的設(shè)計(jì),實(shí)現(xiàn)了坐姿狀態(tài)數(shù)據(jù)的實(shí)時(shí)采集與顯示,具有良好的應(yīng)用性和研究意義。
1 坐姿實(shí)時(shí)檢測系統(tǒng)的設(shè)計(jì)方案
本文設(shè)計(jì)的坐姿實(shí)時(shí)檢測系統(tǒng)由壓力感知單元、壓力信號采集、處理模塊和上位機(jī)顯示構(gòu)成。其設(shè)計(jì)思路:當(dāng)人體處于不良坐姿狀態(tài)時(shí),固定在人體表面的柔性FSR壓力傳感器會在頸椎以及脊椎彎曲時(shí)產(chǎn)生的突出力的作用下產(chǎn)生不同程度的擠壓,依靠壓力傳感器的壓阻效應(yīng),將測量的壓力轉(zhuǎn)換為電阻輸出。信號經(jīng)過放大由A/D將電阻變化信號轉(zhuǎn)換為電壓信號,然后由單片機(jī)處理發(fā)送到上位機(jī)顯示。達(dá)到不同坐姿狀態(tài)對應(yīng)下的數(shù)據(jù)變化實(shí)時(shí)顯示的目的。圖1展示了系統(tǒng)的整體設(shè)計(jì)圖。

圖1 坐姿實(shí)時(shí)檢測系統(tǒng)整體設(shè)計(jì)圖
2 坐姿實(shí)時(shí)檢測系統(tǒng)的硬件選擇
2.1 壓力傳感器
本系統(tǒng)采用INTERLINK ELECTRONICS公司生產(chǎn)的FSR402型號的短尾電阻式壓力傳感器作為感知單元[7]。其感知區(qū)域內(nèi)的壓力越大,輸出電阻越小,工作電壓為5V,壓力范圍為<10kg,實(shí)物圖如圖2(a)所示。

圖2 FSR傳感器實(shí)物圖及安裝位置
為了使FSR傳感器更好地感受到外部的壓力,我們將其表面放置一層自制的硅橡膠突起觸頭。本文主要對脖子、后背、以及腰部長時(shí)間彎曲等不良坐姿狀態(tài)進(jìn)行檢測。因此,在頸椎處放置一個(gè)壓力傳感器(定義為FSR1),用來檢測頸椎彎曲狀態(tài)。后背部位的脊椎處位放置一個(gè)壓力傳感器(定義為FSR2),腰部的脊椎處平行放置一個(gè)壓力傳感器(定義為FSR3),用來檢測軀干脊柱的彎曲狀態(tài)。傳感器的安裝位置如圖2(b)所示。
2.2 主控芯片
考慮到本文設(shè)計(jì)的系統(tǒng)中壓力信號采集簡單,因此我們選用基于ARMv7-M體系結(jié)構(gòu)的32位高性能、低功耗微控制器STM32F103VET6作為系統(tǒng)的主控芯片[8~9],其最高運(yùn)行速度可以達(dá)到72 MHz,CPU的時(shí)鐘運(yùn)行速度與RAM的讀取速度同步,擁有著豐富的片內(nèi)資源和外設(shè)接口。該處理器具有豐富的通用I/O端口,可以自主設(shè)置為其他的外設(shè)功能口;內(nèi)部集成了大容量的嵌入式Flash和SRAM,滿足對大量數(shù)據(jù)儲存和快速讀寫;內(nèi)部集成多路雙采樣和保持功能集成的A/D轉(zhuǎn)換單元,滿足了同時(shí)對多個(gè)模擬量的快速采集;豐富的通信方式選擇(兩個(gè)SPI,兩個(gè)I2C,五個(gè)USART, 一個(gè)USB,一個(gè)CAN通信,一個(gè)SDIO),易與其他外部模塊的數(shù)據(jù)通訊。
2.3 傳感信號采集模塊
該系統(tǒng)包含的壓力傳感器數(shù)目少,單獨(dú)接線,不需要設(shè)計(jì)復(fù)雜的陣列行列掃描采集電路。直接使用STM32芯片內(nèi)部集成的模數(shù)轉(zhuǎn)換器,實(shí)現(xiàn)對壓力數(shù)據(jù)的快速采集和處理。其轉(zhuǎn)換速率可達(dá)1MHz,轉(zhuǎn)換范圍為0~3.6V,采集速率能夠滿足傳感器的實(shí)際采樣需求。
2.4 放大電路模塊
為了便于單片機(jī)對微弱電壓信號的采集,采用基于AD620芯片的放大器模塊對采樣電阻的電壓信號進(jìn)行放大。該芯片具有精度高、成本低、功耗低及供電電源范圍寬(±2.3V~±18V)等特點(diǎn)。可用于微伏、毫伏電壓的放大,放大倍數(shù)易于調(diào)節(jié)(最大1000倍),適用于諸如傳感信號檢測、電壓/電流轉(zhuǎn)換等應(yīng)用場合。
2.5 無線傳輸模塊
為了便于傳感信號的收集,采用WiFi的方式將單片機(jī)處理后的數(shù)據(jù)無線傳輸?shù)絇C端。WiFi模塊微控制單元芯片型號為ESP8266,該芯片是面向物聯(lián)網(wǎng)一款性價(jià)比高、開發(fā)成本低的可編程MCU,能實(shí)現(xiàn)與單片機(jī)之間的串口通信。其內(nèi)部集成了多種模塊包括:32-bit處理器、片上SRAM、天線開關(guān)、功率放大器濾波器和電源管理器等。這種領(lǐng)先特征,使其在開發(fā)和運(yùn)行中擁有強(qiáng)大的片上處理和存儲能力,最少地占用系統(tǒng)資源和外圍硬件電路。ESP8266模塊通過串口UOTXD與UORXD與STM32微控制器進(jìn)行通信[10]。
3 坐姿實(shí)時(shí)檢測系統(tǒng)硬件設(shè)計(jì)
3.1 核心電路
STM32F103VET6芯片和復(fù)位電路、晶振電路、下載電路以及電源電路共同組成了STM32最小系統(tǒng),其電路原理圖如圖3~6所示。同時(shí)單片機(jī)最小系統(tǒng)和ESP8266芯片構(gòu)成了系統(tǒng)的核心采集電路。本文基于STM32最小系統(tǒng)以及放大電路模塊和FSR402壓力傳感器搭建了坐姿檢測系統(tǒng)的硬件電路。

圖3 復(fù)位電路

圖4 晶振電路

圖5 下載電路

圖6 電源電路
3.2 系統(tǒng)檢測原理
坐姿檢測系統(tǒng)的信號檢測原理結(jié)構(gòu)圖如圖7所示,其中R1~R3為采樣電阻,阻值為10kΩ。

圖7 系統(tǒng)檢測原理圖
當(dāng)采樣電阻的兩端輸出電壓經(jīng)過放大電路放大a倍后,單片機(jī)內(nèi)部A/D采集得到的電壓為Vout,根據(jù)分壓原理內(nèi)部對傳感器的電阻進(jìn)行計(jì)算,以FSR1的電阻計(jì)算為例公式如下:
采樣電阻兩端電壓為:

分壓電路的電流為:

FSR1的電阻為:

3.3 系統(tǒng)程序設(shè)計(jì)
單片機(jī)需要編寫執(zhí)行程序完成控制內(nèi)部A/D對傳感器的壓力數(shù)據(jù)采集,對數(shù)據(jù)內(nèi)部處理、控制WiFi模塊對數(shù)據(jù)無線傳輸?shù)榷鄠€(gè)工作。軟件系統(tǒng)采用模塊化設(shè)計(jì)的思想由keil5進(jìn)行編寫,系統(tǒng)語言使用C語言。總體程序由主程序、I/O口配置程序、壓力數(shù)據(jù)采集/處理程序、WiFi通信程序組成,系統(tǒng)程序流程圖如圖8所示,模塊化的設(shè)計(jì)思路提高了系統(tǒng)的設(shè)計(jì)效率。具體工作流程如下:單片機(jī)上電工作之后,系統(tǒng)主程序開始對單片機(jī)的I/O配置初始化,對內(nèi)部的A/D模塊初始化,對ESP8266芯片以及WiFi協(xié)議棧初始化。系統(tǒng)初始化完成后,單片機(jī)按照設(shè)置的程序依次掃描每個(gè)壓力傳感器的數(shù)據(jù)并存儲到RAM中,對數(shù)據(jù)進(jìn)行處理,通過ESP8266芯片的WiFi功能將采集完成的傳感器數(shù)據(jù)發(fā)送到PC端。電腦端口連接WiFi適配器,使用串口助手接收并實(shí)時(shí)顯示接收到的數(shù)據(jù)。

圖8 系統(tǒng)程序流程圖
4 系統(tǒng)實(shí)驗(yàn)與討論
坐姿實(shí)時(shí)檢測系統(tǒng)組裝調(diào)試完成后,將傳感器用創(chuàng)可貼固定在學(xué)生頸部和軀干處,對志愿者的不同坐姿狀態(tài)進(jìn)行實(shí)時(shí)的檢測。首先,我們對系統(tǒng)進(jìn)行了可行性測試,實(shí)驗(yàn)結(jié)果如圖9所示。結(jié)果表明,當(dāng)學(xué)生身體處于彎曲狀態(tài)時(shí),設(shè)計(jì)的系統(tǒng)可以快速地檢測和顯示頸部、軀干處的壓力信號,滿足設(shè)計(jì)的需要。
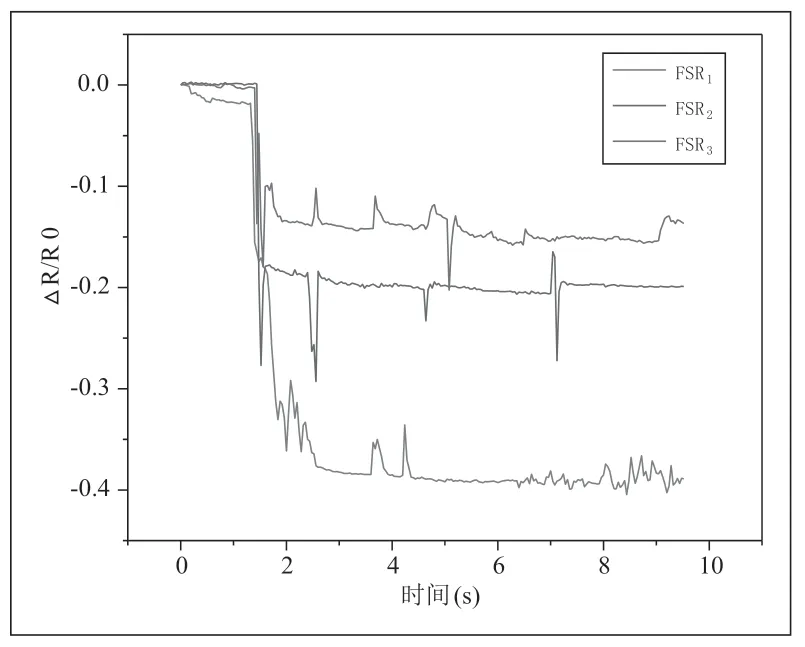
圖9 系統(tǒng)可行性實(shí)驗(yàn)
接下來,利用設(shè)計(jì)的系統(tǒng)對學(xué)生坐姿的實(shí)時(shí)狀態(tài)進(jìn)行測試實(shí)驗(yàn)。實(shí)驗(yàn)結(jié)果如圖10所示。開始測試時(shí)志愿者先保持正確坐姿,從圖10紫框的測試過程中可以看出此時(shí)傳感器FSR1-FSR3采集的壓力數(shù)據(jù)沒有明顯的變化。然后志愿者開始模擬不良坐姿(頭部保持正常姿態(tài)),后背開始彎曲。此時(shí)傳感器FSR2受到脊椎突出力的作用,輸出明顯的電阻變化。當(dāng)軀干進(jìn)一步彎曲時(shí),腰部處安裝的傳感器FSR3也在脊椎突出力的作用下輸出有了明顯的變化。接下來,志愿者頭部也開始彎曲下低,在頸椎作用力下傳感器FSR1也輸出了明顯的變化。在圖10黑框的測試過程中,傳感器FSR1-FSR3處于長時(shí)間的輸出變化狀態(tài),此時(shí)志愿者沒有保持正確的坐姿,即不良坐姿。

圖10 坐姿實(shí)時(shí)測試結(jié)果
5 結(jié)束語
本文設(shè)計(jì)了一種用于學(xué)生坐姿狀態(tài)監(jiān)測的測試系統(tǒng),通對FSR壓力傳感器采集學(xué)生頸椎和脊椎的彎曲產(chǎn)生的壓力信號,利用STM32單片機(jī)進(jìn)行有效的檢測和處理,最終將處理完成的傳感器數(shù)據(jù)無線發(fā)送到PC端,實(shí)現(xiàn)了對不同坐姿狀態(tài)下傳感器壓力數(shù)據(jù)的采集和實(shí)時(shí)顯示。測試結(jié)果表明:設(shè)計(jì)的系統(tǒng)可以明顯判斷出不良坐姿狀態(tài)的特征,可以對學(xué)生的坐姿狀態(tài)進(jìn)行遠(yuǎn)程監(jiān)控。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45