一種新的概率逼近遍歷算法在雷達布站的應用
2023-01-04 11:33:48周紅進蘭國輝王翔宇
測控技術 2022年12期
周紅進, 蘭國輝*, 李 偉, 王翔宇
(1.海軍大連艦艇學院 航海系,遼寧 大連 116018; 2.大連船舶重工集團有限公司 軍工部,遼寧 大連 116019)
基于到達時間差(Time Difference of Arrival,TDOA)的無源雷達組網跟蹤探測目標的首要問題是確定組網雷達的布站方案[1]。確定雷達布站方案過程通常分2步實現:首先,確定評價布站方案優劣的指標;然后,根據評價指標設計尋優算法,搜索最優布站方案。
隨著雷達信號處理技術的發展,評價指標也隨之改變。早期采用目標發現概率和漏警率等指標,現代雷達主要采用目標跟蹤定位精度指標[2-4]。孫旭鋒和楊益川[5-6]采用了目標跟蹤定位誤差的均方根(Root Mean Square,RMS)描述跟蹤定位的精度,這種方法簡單直接且易于計算,但是不能反映出目標與組網雷達的相對空間關系對跟蹤定位精度的影響。Hu等[7]采用了克拉美羅下界(Cramer-Rao Lower Bounds,CRLB)指標,較好地解決了文獻[5]和文獻[6]中所提方法的不足,但是由于CRLB計算過程復雜,當組網雷達站超過3個時,計算量將顯著增加,導致后續以該指標為評價函數設計的尋優算法難以實現。針對上述問題,本文將衛星導航系統定位選星時描述星座構型優劣的幾何精度因子(Geometric Dilution of Precision,GDOP)作為衡量組網雷達跟蹤定位目標精度的指標,并基于TDOA的定位方程推導出相應的計算模型。在此基礎上,通過網格化目標空域并對所有網格點計算其加權GDOP均值作為雷達布站的評價函數,避免了在目標空域對GDOP多重積分引起的計算實現難的問題,同時也可獲得根據重點空域調整加權系數以實現重點空域重點關注的靈活性。
評價指標確定后,可以在目標空域建立合適的評價函數并設計尋優算法,在雷達部署區域搜索站址組合最優解,從而獲得最優雷達布站方案。王德成等[8]研究了基于二進制編碼的遺傳算法設計尋優算法,搜索成功率可以達到85%,但存在編碼長度過長、搜索速度慢和容易陷入局部最優等缺陷。文獻[9]~文獻[12]研究了基于多目標粒子群算法解決局部最優的問題,通過初始化多個子種群并行尋優,提高了算法執行速度,也有效避免了陷入局部最優的問題,搜索成功率高于95%,但仍然存在受初始群眾分布和變異系數干擾的問題,且當評價函數改變后,需要重新設計算法,通用性偏弱,沒有克服仿生類算法的固有缺陷。針對上述尋優算法存在的問題,考慮到最優雷達站址組合的搜索對實時性并無要求,設計了基于概率逼近實現的最優解遍歷搜索算法,通過調整隨機產生的站址組合樣本規模,遍歷樣本以一定概率獲得最優解。
在確定了組網雷達布站方案的GDOP因子評價指標并設計了大樣本遍歷大概率逼近的尋優算法之后,以4個雷達站組網布站組合為例,在北京超算云平臺上運行搜索算法,成功搜索到了最優雷達布站站址組合方案。
1 基于TDOA的無源雷達跟蹤定位模型
測量目標信號到達時間差是無源雷達跟蹤定位目標的一種常用方式。若要在三維空間里確定1個點,至少需要3個距離差和4個觀測點。因此,利用目標輻射信號到達時間差分定位,至少要有4個觀測站。4個被動雷達站探測記錄目標輻射信號到達時刻,進而獲取到達時間差值,從而計算距離差。由距離差確定3個雙曲面的交點,即為目標位置。
設雷達主站為S0,3個雷達副站為Si(i=1,2,3);目標坐標為(x,y,z)T,主站和副站坐標為(xi,yi,zi)T(i=0,1,2,3);目標輻射信號到達各站的時間為ti(i=0,1,2,3),目標到各站的距離為ri(i=0,1,2,3),各副站到達時間與主站到達時間的時間差可寫為τi(i=1,2,3)。
將到達時間差乘光速,可得目標到各副站和主站的距離差為
Δri=cτi
(1)
這個距離差還可由目標到主站的距離減去目標到副站的距離直接得到,即
Δri=ri-r0
=[(x-xi)2+(y-yi)2+(z-zi)2]1/2-
[(x-x0)2+(y-y0)2+(z-z0)2]1/2
(2)
由式(2)可得:
(3)
(4)

(5)
式(5)應有3個,x,y,z為未知數,改寫成矩陣形式為
(6)
即AX=B,其中:
根據線性方程組的線性性質,AX=B的解為AX=C解的r0倍和AX=D的解之和。根據式(6)可以計算目標的坐標。
2 雷達布站評價函數
雷達布站評價函數是衡量雷達組網跟蹤探測性能的主要指標,一般采用跟蹤定位目標的精度表示。單個目標的跟蹤定位精度反映了雷達的鎖定能力,區域目標的跟蹤定位精度則反映了雷達跟蹤定位的覆蓋性能。通常采用區域跟蹤定位精度衡量雷達組網的整體性能。
2.1 單點定位GDOP值
衛星導航系統中,在選擇合適的星座進行定位時,一種有效且常用的選星指標為GDOP。借鑒衛星導航系統的GDOP的定義,推導無源雷達跟蹤定位單個目標的精度計算公式。
對式(2)兩邊進行全微分可得:
(7)
式中:
上述方程共有3個,寫成矩陣形式為
dR=HdX+dS
(8)
其中:
可見,定位誤差dX由時差測量誤差造成的距離差誤差dR和站址誤差dS決定,則有
dX=H-1(dR-dS)=(HTH)-1HT(dR-dS)
(9)
定位誤差的協方差矩陣為
cov(dX)=E[dXdXT]
=(HTH)-1HT[cov(dR)+cov(dS)]H(HTH)-1
(10)
顯然站址誤差和距離差誤差相互獨立,則有
E[dRdST]=E[dSdRT]=0
設σΔri為距離差測量誤差的標準差;ηij為各副站距離差的相關系數;σs為站址誤差的標準差。所以3個副站的距離差協方差矩陣為
(11)
故站址誤差協方差矩陣為
(12)
不同方向、不同站址的誤差相互獨立,互協方差為0。由此,cov(dR)+cov(dS)=[fij]3×3。
(13)
故定位的總協方差為

(14)
定位的幾何精度因子可以寫為
(15)
式(15)為基于TDOA的無源雷達組網跟蹤定位目標的精度指標計算公式,可以看出影響其精度的因素主要有站址誤差、時間差測量誤差、雷達站和目標之間的相對距離。
2.2 區域GDOP值
目標飛行空域為V,則飛行空域的整體定位誤差為
(16)
4個雷達站坐標已知的情況下,可以利用式(16)對目標空域的整體定位誤差進行評估。
如果根據整體定位誤差最小原則,確定組網布站方案,而4個雷達站的坐標全部未知,共12個未知數,積分運算量大、解析表達式復雜,計算難以實現。
2.3 網格化目標空域
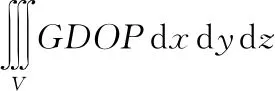
假設目標空域為規則區域(非規則區域可以分解為多個規則區域),以雷達定位精度指標為標尺,可以將目標區域進行網格化,如圖1所示。
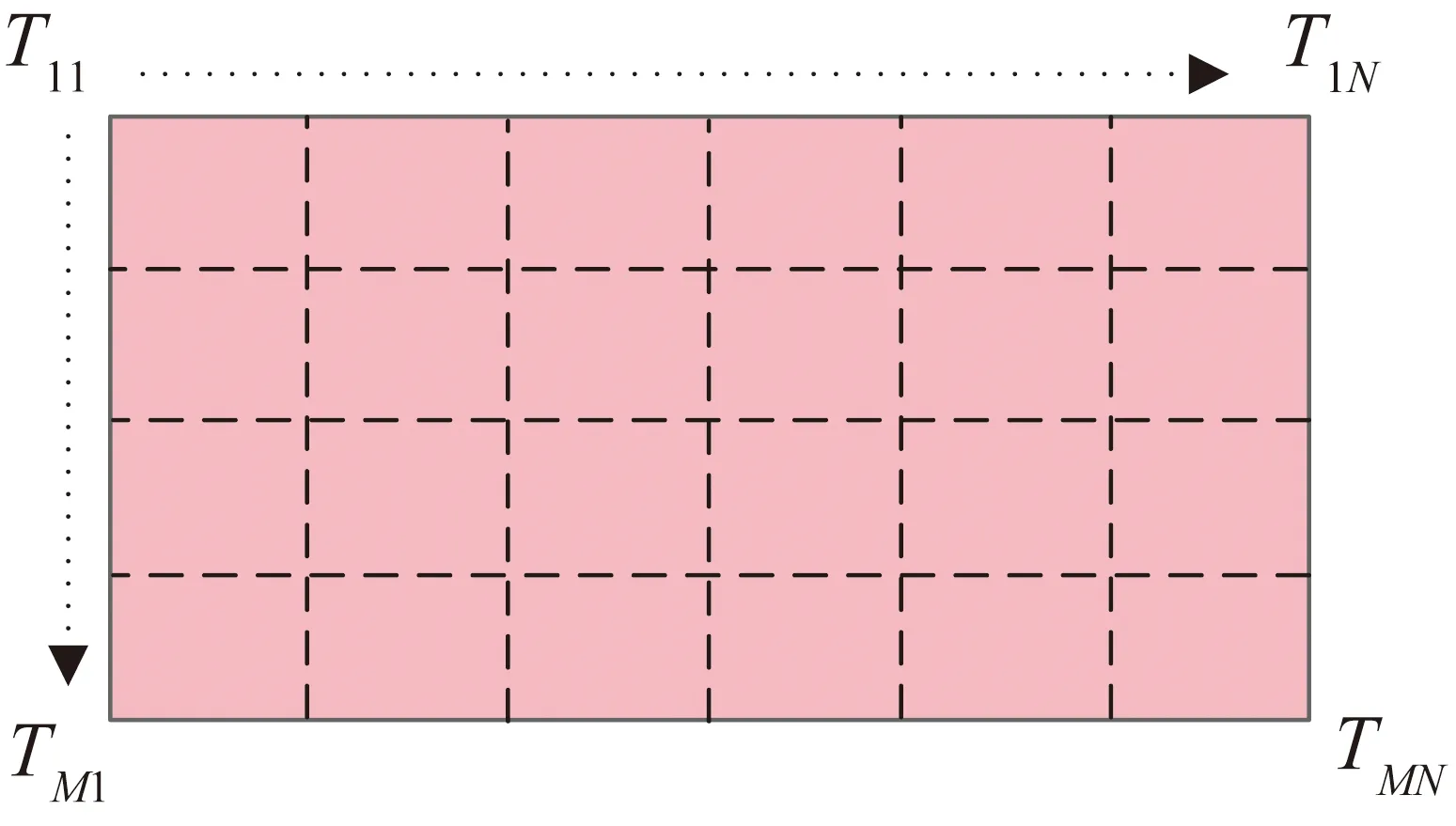
圖1 網格化后的目標飛行空域
設網格點集合為
U={T11,…,T1N,…,TM1,…,TMN}(i∈[1,M],j∈[1,N])
在集合U內計算GDOP值,進行加權平均后作為目標飛行空域的GDOP值,加權系數與目標空域關注度相關。將重點關注區域的加權系數調大,反之調小。則目標飛行空域整體定位誤差為
(17)

將目標空域網格化后,避免了多重積分計算的復雜度。同時,可以根據目標空域關注度調整加權系數,有利于提高重點敏感區域的目標探測精度,也提高了雷達布站的靈活性和針對性。
式(17)即為雷達布站評價函數。根據該函數,在雷達站部署區域尋優4個站址,函數值最小的站址組合即為最優雷達布站方案。
3 雷達站部署方案尋優策略及結果
3.1 尋優策略
根據已知條件,雷達布站區域由4塊地形組成,設4塊地形區域為Ui(i=1,2,3,4)。按照1塊地形布設1個雷達站的原則,在4塊地形上遍歷計算所有布設方案的Err(U1,U2,U3,U4),則整體定位誤差最小方案為
argmin{Err(U1,U2,U3,U4)}=(S0,S1,S2,S3)
(18)
根據式(18)遍歷算法得到的雷達站坐標(S0,S1,S2,S3)即為整體定位誤差最小的4個雷達站的坐標。
已知目標函數和遍歷空間,尋找最優站址組合的實質是一個遍歷搜索最優解問題。常用的遍歷算法有自回歸算法、遺傳算法、模糊神經網絡算法、蟻群算法和粒子群算法等,這些搜索算法是在目標函數的引導下快速找到最優解。為了平衡搜索時間和精確度,通常要根據具體問題調整設置搜索參數。搜索參數的設置需要大樣本數據訓練獲得,且通用性較弱。即使設置了合適的參數,搜索結果也容易陷入局部最優解。
由于雷達布站需要在4塊獨立的地形分別尋找一個站點形成一個站址組合。根據這一特點,制定了4個地形分別隨機產生一個站點,根據式(17)計算目標空域總體跟蹤定位誤差,記錄總體定位誤差最小的站址組合,如圖2所示。
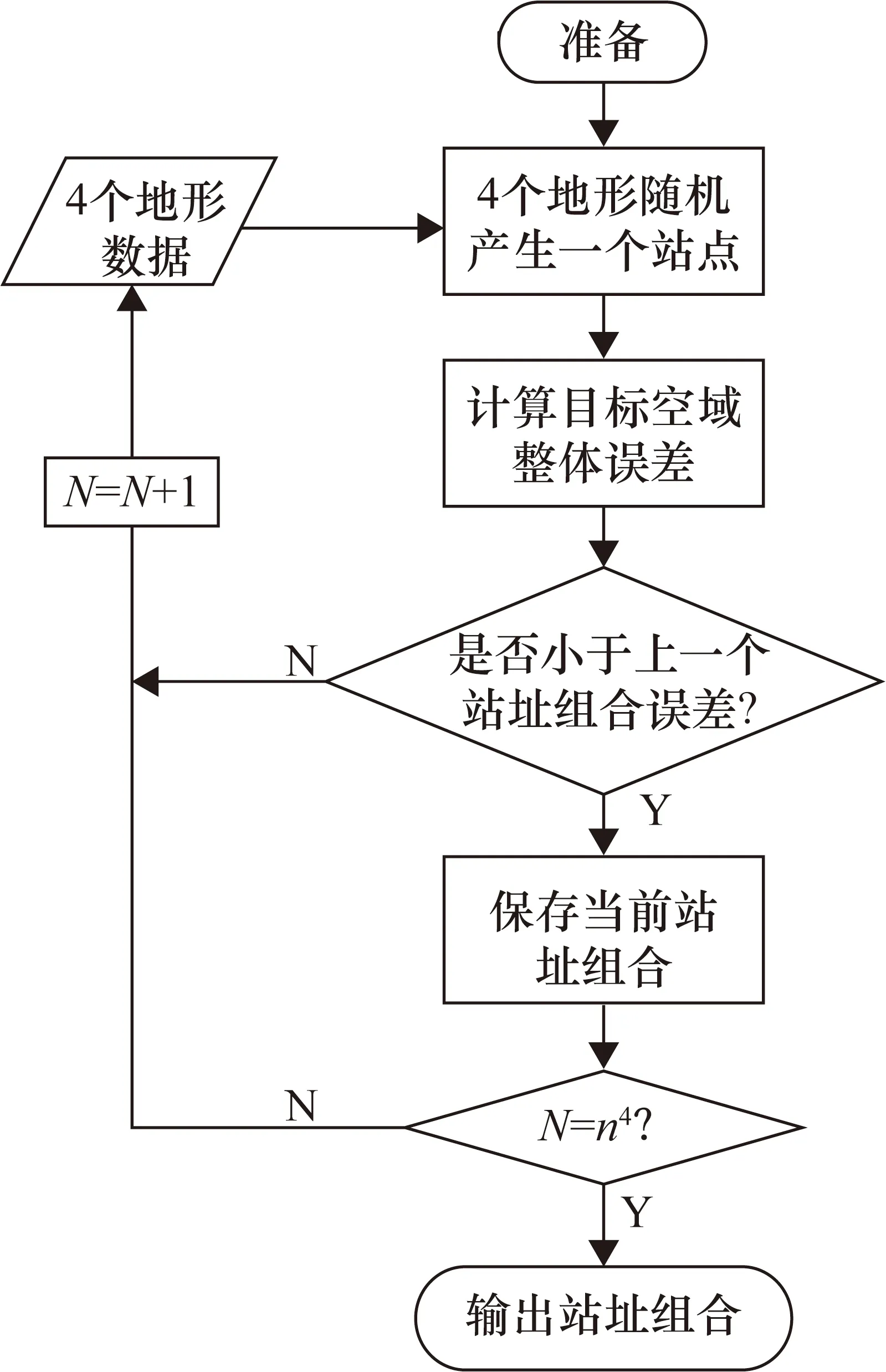
圖2 最優站址組合尋優策略
尋優策略的優點是簡單直接且適合并行運算,只要尋優次數足夠,一定會找到最優解;缺點是計算量大,比較耗時。
每個地形候選站點個數為n,假設隨機產生的站址組合樣本規模為n4時,則搜索到最優解的概率為
1-(1-1/n4)n4×100%
(19)
考慮到雷達布站方案求解并不要求實時性,且國內超算運行速度超過每秒1.25e17 次,利用國內超算提供的云計算服務可以遍歷尋優到最優解。
3.2 實驗結果

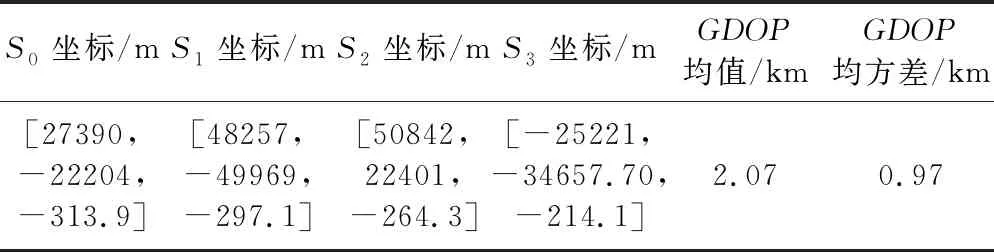
表1 最優站址組合尋優結果
從圖3~圖5可以看出,主站和3個副站的布局呈Y字形,目標空域位于Y字形閉口一側,沿著閉口方向,隨著探測距離增大,跟蹤定位誤差輻射狀增大。可以認為,4個雷達站的布局構型與目標空域的探測精度直接關聯。

圖3 最優雷達布站站址和目標空域
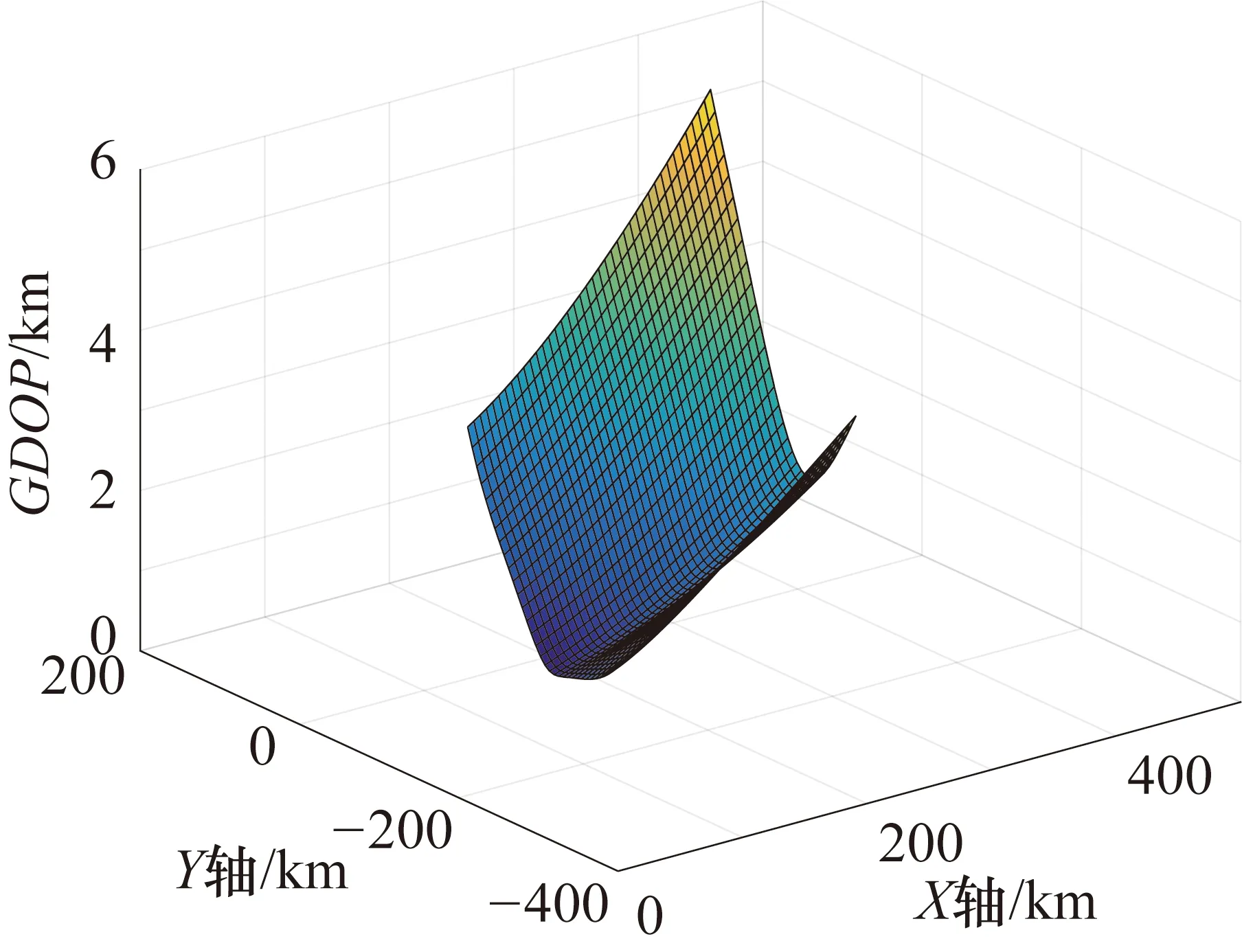
圖4 目標空域誤差變化曲線
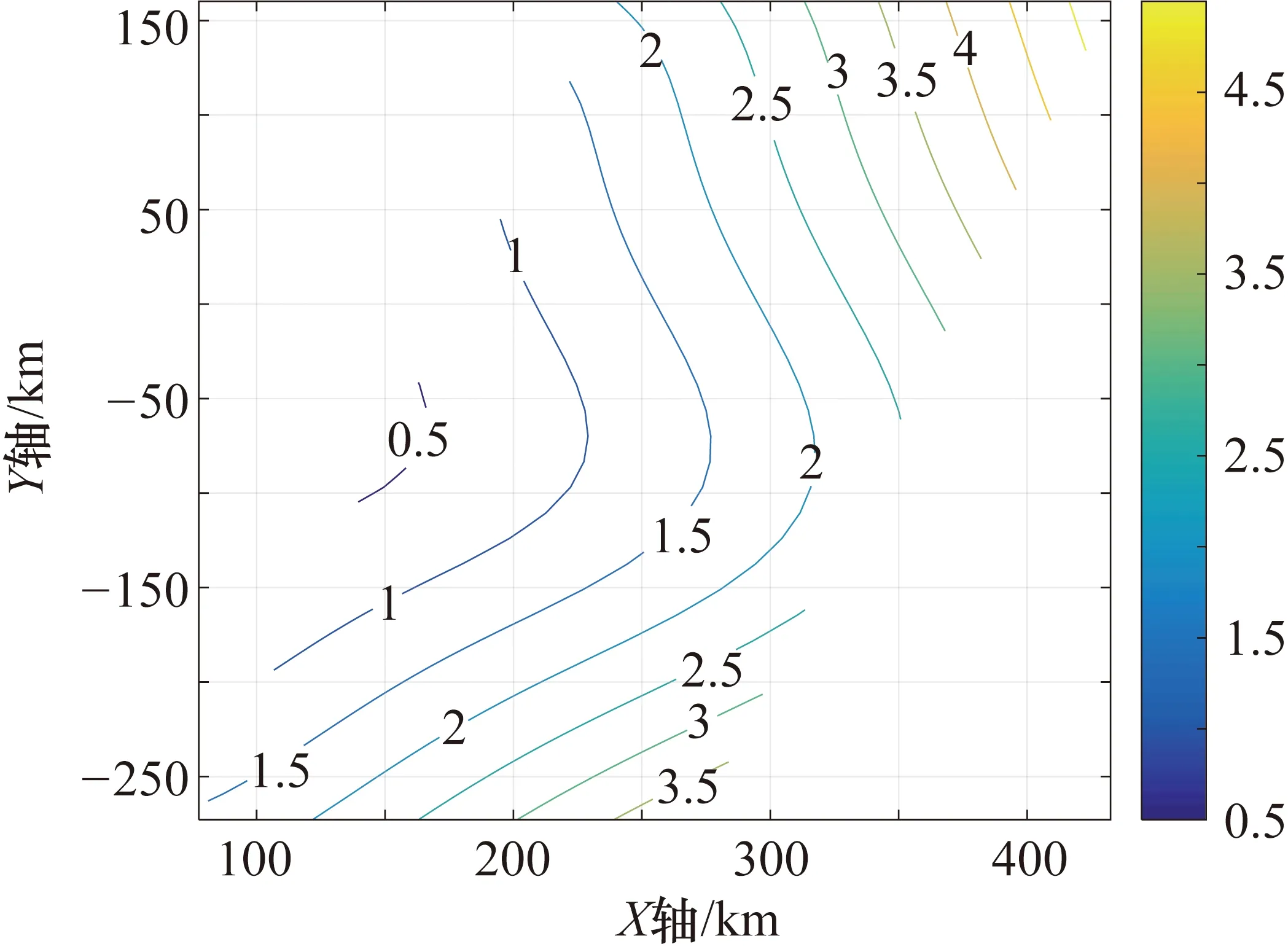
圖5 目標空域等誤差曲線
4 結論
無源雷達布站方案是決定雷達組網跟蹤探測性能的一個關鍵因素。布站方案的求解本質上是根據目標空域探測需求和布站區域約束條件尋優最優解問題。
① 以目標空域的GDOP值作為目標函數評價布站方案可以有效提高無源雷達組網跟蹤定位精度。以網格化后的目標空域的GDOP值的加權平均代替多重積分計算,簡化了計算復雜度,且可以通過調整加權系數提高重點敏感空域的探測精度,增加了雷達布站的靈活性。
② 從4個地形數據中隨機產生站址組合作為搜索樣本,這種搜索策略優點在于簡單直接且可以并行搜索,有利于發揮超算算力,也保證了最優解的搜索成功率;缺點是隨著4個地形數據樣本增加,搜索到最優解的遍歷次數將會以o(n4)增加,搜索時間顯著延長,且依賴于超級計算機運行搜索算法。可以通過增加約束條件(如雷達主站布設在山峰最高點)來縮小樣本規模,從而縮短搜索時間。
③ 實際雷達布站中,應該考慮地形地勢對無線電波的遮擋效應。這是布站算法工程化必須要考慮的因素,也是后續的研究方向。