基于機器視覺的路面坑槽噴補路徑規劃技術研究*
2022-12-29 08:29:58李超帆王朋輝
交通科技 2022年6期
李超帆 王朋輝
(長安大學公路養護裝備國家工程實驗室 西安 710064)
國內外對于路面智能化養護方面的技術研究主要集中于路面養護決策制定及道路管理方面的智能化研究,利用智能的檢測系統對道路的實時信息進行精確地收集和不斷地更新,比如冰雪、大霧、特定的道路病害等信息的收集更新;通過構建信息化的道路養護體系,從而實現道路的高品質智能化養護[1-5]。
然而,特定路面病害的智能化修補作業技術尚不成熟,目前大部分研究工作集中于裂縫類病害的智能化修補[6-9],并已經推出了多種裂縫智能化修補樣機,該技術主要經歷了4個階段的發展過程:CMU試驗樣機階段、CMU-UT場地樣機階段、ARMM原型機和APCS原型機階段。路面裂縫智能化修補的發展歷程均離不開機器視覺技術,并且機器視覺技術的應用比重越來越大,這可以為坑槽的智能化修補提供一些參考[10]。
對于路面坑槽的修補,不僅僅要求修補過后的路面有良好的修補效果,還要求在某些特定的情況下,路面修補工序的快速完成,以保證路面能夠盡快恢復正常使用,保證交通通暢開放,而噴射式修補方法就是一種在滿足高效快速要求的同時,具有綠色、經濟等優點的方法,其修補現場圖見圖1所示。然而,受現有的噴補車類型(拖掛型和底盤安裝型)限制,需要在人力操作下才能正常運行,比如拖掛型噴補車操作員需要在惡劣的環境下進行高強度的勞動作業,半自動修補車雖然改善了操作環境,但是駕駛員的視野受到很大的限制,即使有監控輔助也很難全面地觀察作業過程,很難實現合理高效地對修補過程做出決策。
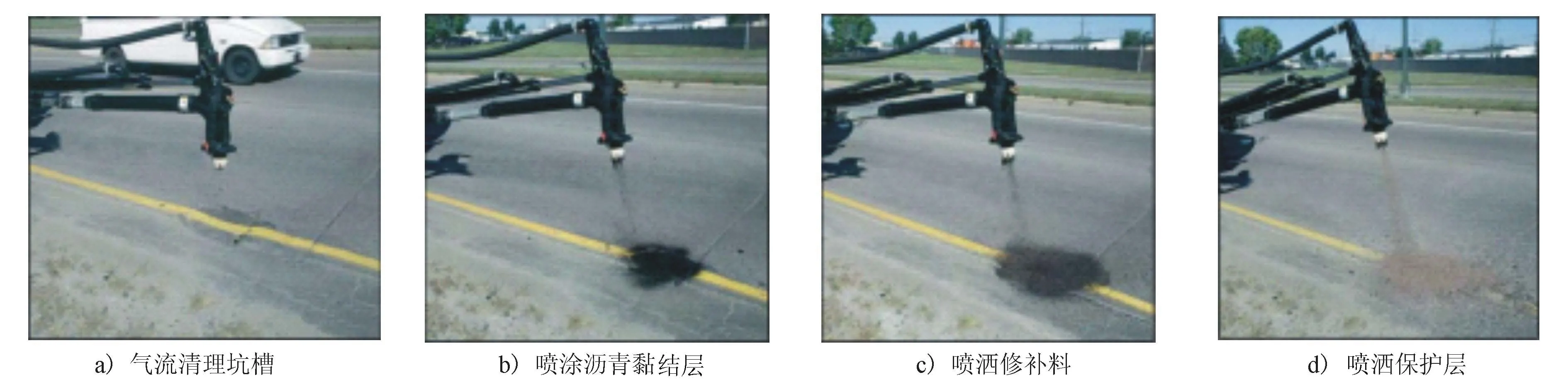
圖1 噴射式修補法坑槽修補過程現場圖
綜上述,目前的噴射式坑槽修補車在路面養護時,從坑槽的識別到修補作業路徑規劃都離不開人工監控和工作經驗干預,對集料堆積模型、集料的噴射特性和噴補路徑規劃都缺乏分析。不同的操作人員受自身經驗和不同環境的影響,會導致參差不齊的坑槽噴補結果。
為了避免環境因素和人為因素對坑槽整體修補質量的影響,本文對基于視覺的噴補路徑規劃技術進行研究。研究中采用kinect相機采集路面深度圖像來提取坑槽病害的三維信息,基于深度圖像規劃噴補路徑以自動修補時,有2個問題亟待解決:①噴補前處理相關問題;②規劃噴補路徑。其中,噴補前處理相關問題包括修補平臺調平和坑槽定位及路面深度計算;噴補路徑規劃包括待修補切片獲取和切片內的修補路徑規劃。這兩個問題的解決有助于均勻合理的布置噴補路徑,保證噴補路徑不超出坑槽邊界,并提高坑槽的修補平整度。
1 基于視覺的路面坑槽噴補前處理
1.1 調平修補平臺
調平修補平臺可將相平面平行于路面采集深度圖像,這樣采集的深度圖像不必進行三維旋轉操作即可直接切片來規劃修補路徑,此外,調平平臺還可將修補料垂直噴入坑槽,有益于提高修補平整度。在對修補平臺進行調平作業時,參考RANSAC平面擬合,以差值最小化思想為基礎,通過有序調節各個支腿的升降來調整平臺,其原理見圖2,具體步驟如下。
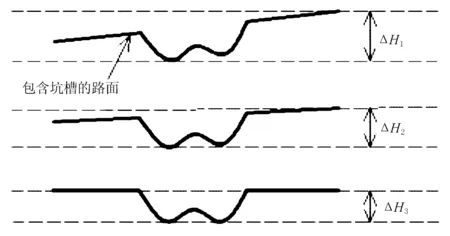
圖2 差值最小化逼近調平原理圖
步驟1。利用kinect采集路面深度圖像,計算最大深度與最小深度的差值L0。
步驟2。正向調節支腿1的高度,采集深度圖像并計算其深度差值L11,之后調節支腿回位。相似的,反向等量調節支腿1的高度,采集深度圖像后計算深度差值L12,之后再次將支腿調節回位。對比L11和L12的大小,取兩者中較小的值,記為L1,并記錄調節方向。
步驟3。將上一步驟方法用于支腿2與支腿3,獲取對應的深度差值L2、L3并記錄支腿對應的調節方向。
步驟4。對比L0、L1、L2、L3,若L0最小,說明平臺與路面平行,退出調平循環;若最小值存在于L1、L2、L3中,按照最小值相應的調節方向調節對應的支腿,并返回步驟1。
1.2 定位坑槽并計算路面深度
對于待修補坑槽定位,運動平臺可帶動深度相機遍歷檢測整個待修補的區域,待修補路面最大深度所在的位置被檢測出即可。據此提出基于最大值查找的坑槽定位方法,其步驟如下。
步驟1。采集深度圖像并進行降噪修復。
步驟2。求取深度圖像最大值,以及最大值相應的位置。
步驟3。若噴嘴位置和最大值位置不同,則將噴嘴移動至最大值位置處,然后返回步驟1。若噴嘴位置和最大值位置重合,則坑槽定位結束。
定位坑槽之后,獲取深度圖像的最大深度和路面深度,路面和坑槽深度示意圖見圖3所示,通過式(1)來判斷是否有待修補層。
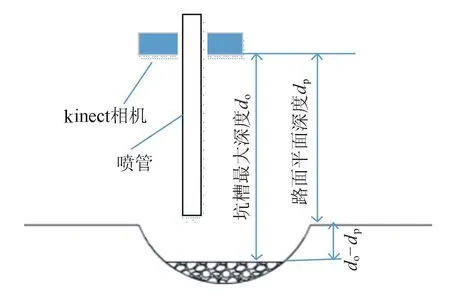
圖3 路面和坑槽深度示意圖
(1)
式中:d為坑槽最大深度,mm;dp為路面平面深度,mm;δ為差值閾值。
2 基于視覺的坑槽噴補路徑規劃
修補平臺調平后,對基于視覺的噴補路徑規劃進行研究。包括待修補切片獲取和切片內的噴補路徑規劃。為了提高噴補的密實度和平整度,規劃噴補路徑時,應遵循區域優先、由深及淺、路徑均勻布置的路徑規劃原則。下文待修補切片獲取方法可保證區域優先、由深及淺的原則,切片內噴補路徑規劃方法可保證噴補路徑均勻布置。
2.1 獲取待修補切片
2種不同類型坑槽的切片剖面示意圖見圖4,為了提高算法對于不同類型的坑槽的通用性,采用雙漫水填充方法獲取各個坑槽的待修補切片,其步驟如下。
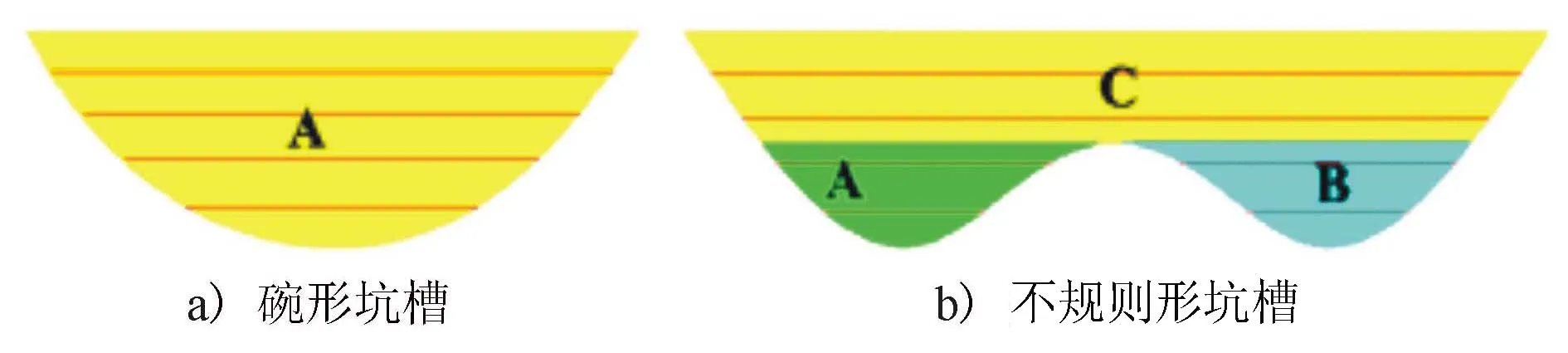
圖4 2種坑槽切片剖面示意圖
步驟1。采集坑槽深度圖像并降噪修復,記為Iimg。
步驟2。以噴嘴所處位置為種子點,對圖像Iimg漫水填充得到切片Snozzle。
步驟3。求取Snozzle的最深點并記錄其位置lmax(x,y)。
步驟4。以lmax(x,y)為種子點,對圖像Iimg進行第二次漫水填充,所得漫水區域即為坑槽的待修補切片Srepair。
2.2 規劃切片內噴補路徑
在切片輪廓的引導下,對待修補切片采用往返直線的方式進行噴補,其原理圖見圖5,其中,圓點表示噴補路徑與待修補的切片外部輪廓的交點,星點表示為對直線噴補路徑進行分段的拆分點。

圖5 基于輪廓引導的往返直線路徑規劃原理圖
由圖5可見,按照輪廓逆時針順序,在輪廓引導作用下,切片的噴補路徑依次為噴補直線填充線和分段輪廓線,確保切片的噴補路徑均勻合理地分布并位于坑槽邊界內部。
求出輪廓的交點并進行交點間合理的配對是輪廓引導往返直線填充法的關鍵所在,配對時外輪廓上編號為奇數的交點和編號為偶數的交點進行配對,交點合理配對之后,按照輪廓引導往返直線填充法的要求,以輪廓逆時針的方向執行直線填充線和輪廓連接線路徑的噴補,在執行規劃好的噴補路徑時,若直線填充線的2個端點都位于外圍輪廓線上,就需要用拆分點對其進行拆分。按照這種流程,輪廓引導下采用往返直線填充法所規劃的噴補路徑能夠形成閉環,并且不會超過坑槽的邊界。在合理的噴補參數的配合下,直線填充線往返2次噴補可以確保噴補切片的平整度。
3 實驗結果
本文所提方法適用于深度大于1 cm、直徑大于10 cm的坑槽,這里選擇典型的碗形和不規則形坑槽作為實驗對象,其實物圖見圖6,圖中紅線是輪廓輔助線,目的是為了突出顯示坑槽形狀。
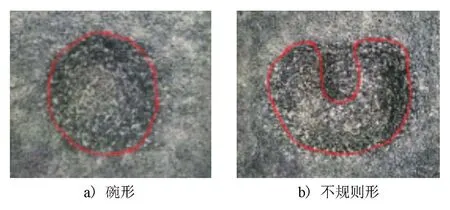
圖6 碗形和不規則形坑槽
2種坑槽的噴補路徑規劃結果圖見圖7。
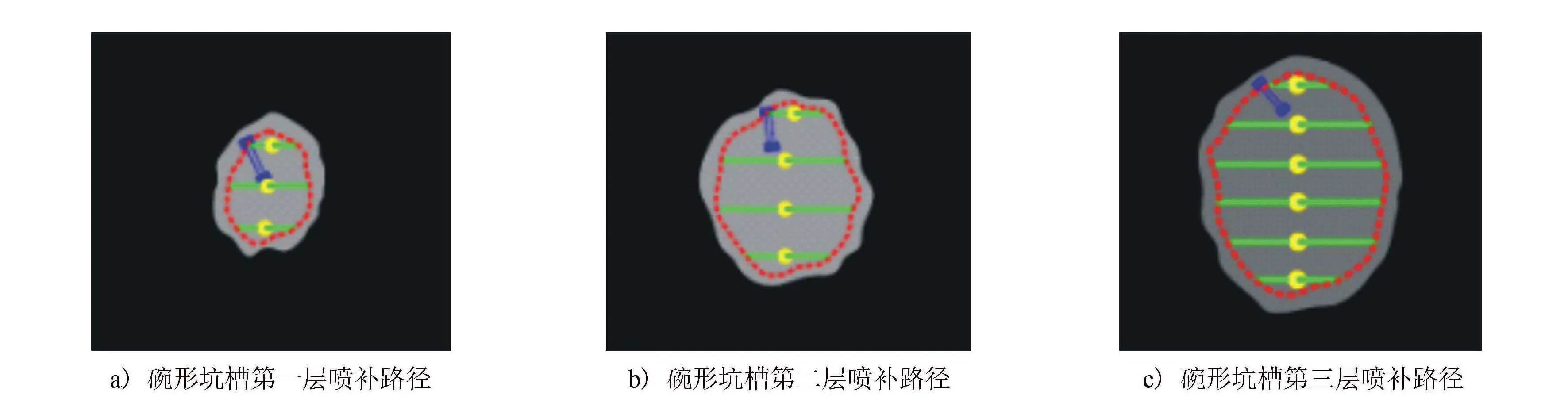
圖7 碗形和不規則形坑槽的各切片噴補路徑規劃結果
圖7中所示的中心部位的矩形點的位置為噴嘴的起始位置,另外一個矩形點表示待修補切片的噴補路徑的初始點和終止點;往返直線填充線表示為實直線,位于直線上的圓點即為拆分往返直線填充線的“拆分點”;往返直線填充線之間的輪廓連接線為圖中的虛線。從圖7所示的規劃后的噴補路徑可知,無論是凸集形狀的坑槽,還是凹集形坑槽,本文所提的雙漫水填充算法不僅還可以準確查找到待修補切片,還可以在輪廓引導下采用往返直線填充法進行合理的路徑規劃。
2種坑槽噴補前后的路面平整度參數對比結果見表1。

表1 2種坑槽噴補前后的路面平整度對比 mm
由表1可見,坑槽噴補后路面和原路面之間的最大正差平均差值僅為0.25 mm,可以認為幾乎不存在差異,這項數據說明了噴補后的坑槽區域幾乎無過填充現象;噴補前后最大負差的平均差異為3.5 mm,且最大負差都大于原路面,這項數據說明噴補后坑槽存在欠填充現象。2種坑槽修補前后路面均方差之間的差異分別為1.44 mm和2.0 mm,平均差異為1.72 mm,此項的差異不大,說明噴補取得了良好的平整度,因此可以認為基于視覺的噴補路徑規劃方法對不同類型的坑槽具有適用性。此外,采用噴射式修補工藝時,本文所提方法適用于瀝青混凝土路面,將噴射式修補工藝替換為澆筑水泥混凝土時,本文所提方法對于水泥混凝土路面的修補同樣適用。
4 結語
坑槽噴補技術是一種關于路面坑槽養護的綠色、快速、高效的修補技術,但是現有的路面修補過程都是依靠人力操作完成的,環境因素和人為因素對整體噴補平整度產生的影響較大。本文對基于視覺的路面坑槽噴補路徑規劃問題進行了研究。
1)修補前處理方面,提出了調平修補平臺、定位坑槽并計算路面深度的方法。其中,修補平臺調平基于差值最小化思想實現;噴嘴定位基于最大深度查找實現。
2)修補路徑規劃方面,提出了獲取切片的雙漫水填充方法和基于輪廓引導規劃切片內噴補路徑的方法。其中雙漫水填充方法針對深度圖像連續執行了2次漫水填充操作;輪廓引導下采用往返直線填充法的關鍵技術在于求出輪廓的交點并將交點進行合理的配對,然后按照輪廓引導往返直線填充法的要求,以輪廓為引導按照逆時針的方向執行直線填充線和輪廓連接線路徑的噴補。
3)碗形坑槽和不規則形坑槽的噴補路徑規劃和修補實驗結果表明,本文所提方法對于凸集形和凹集形坑槽都具有適用性,可以合理均勻地將噴補路徑布置于待修補切片內,提高坑槽噴補平整度和質量。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
公民與法治(2020年11期)2020-07-25 02:02:06
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41