全輪互聯懸掛系統設計
2022-12-28 12:36:08單煒聰馮汶迪周金偉
汽車實用技術 2022年23期
單煒聰,馮汶迪,周金偉
全輪互聯懸掛系統設計
單煒聰,馮汶迪,周金偉*
(廣東白云學院 機電工程學院,廣東 廣州 510450)
近年來汽車產業發展迅猛,在碳中和碳達峰等國家戰略目標的支持下,電動車日益增多,大容量電池在帶來長續航的同時也使車重隨之增加,車輛穩定性以及舒適性相應下降。文章所描述的全輪互聯懸掛就如何提高車輛的行駛穩定性以及舒適性進行研究,將全車的阻尼器通過液壓管路進行連接,并用限流閥進行流量控制,通過識別汽車行駛姿態以及駕駛員意圖,對特定管路的壓力進行調節,從而改善特定情況下的阻尼,在不損失汽車舒適性的前提下降低車輛的側傾仰俯,從而增強車輛穩定性,提升汽車的操控性。
全輪互聯懸掛;模糊控制;實驗分析;車輛穩定性
汽車的行駛姿態、極限操控時的穩定性和舒適性[1],與汽車底盤設定息息相關,而設定取向一般為舒適性取向和極限操控時穩定性的取向,且無法同時兼顧極限操控的穩定性與舒適性,原因是汽車的底盤由傳動系統、轉向系統、行駛系統和轉向系統組成,而目前市面上大多數車輛底盤的四個系統在汽車上各司其職,獨立工作,行駛系統與其余系統之間無信息交流,即便行駛系統具有自主可調節性也只能根據路面信息或駕駛員手動調節進行調整,無法根據轉向系統、行駛傳動系統和轉向系統的具體設定和工作狀態進行針對性調整,因此,在舒適取向和運動穩定取向之間無法做到有效兼顧,隨著現如今科技的進步和電子技術的提升,底盤系統之間的信息交流成為可能[2]。全輪互聯懸架正是通過整合底盤系統信息,并作用于行駛系統,從而兼顧穩定性和舒適性的產物。其由全輪互聯阻尼器,控制閥門,模糊控制器,加速踏板角度傳感器,減速踏板傳感器,方向盤角度傳感器組成。本文就其建模,控制原理以及仿真結果三個方面對系統進行敘述。
1 全輪互聯懸掛互聯阻尼器建模以及描述
1.1 抗側傾聯通減震方式分析
該部件主要通過液壓原理和流體力學方面進行互聯液壓。首先減震器分有活塞上腔和活塞下腔,工作桶和儲油桶。當減震器受壓縮時活塞將會下行,活塞中的減震器油通過活塞中的孔隙從下腔向上腔轉移,這一過程孔壁和油液就產生出阻尼力。此系統將兩只減震器的內筒和外筒交替相連,下文將詳細介紹其形式。在兩兩相連過程中都連裝著一個流通閥門,閥門由高度傳感器傳出的數據進行實時適量的開放。這一過程充利用了減震器中的減震油使得四支減震器有各自的聯系之處,又各自有其獨立之處。
假設在高速向右轉向時,由于離心力大于向心力,左側的懸掛將受到壓縮導致減震器活塞向下壓縮,在活塞孔處產生阻尼力,此時由于液壓關系油液通過內筒底下的油孔流動到右側懸掛減震器的外筒里。右側的懸掛將受到拉伸導致減震器活塞向下拉伸,活塞孔處也會產生阻尼力。此時由于液壓關系油液通過外筒里的油孔流回左側內筒里,右側減震器外筒的油通過管道流動到左側內筒,正好左側活塞桿壓縮,從右側外筒流動到油液左側內筒油腔內產生壓力,阻礙油塞過度下行壓縮,而右側活塞桿拉伸,使得外筒的油液流到左側內筒,這一過程恰恰相反,使得左右兩邊在一定時間下得到力的平衡,從而使得左右兩邊減震器不會過度的壓縮和拉伸。而且現在的左外筒和右內筒相連產生負壓,使得左內筒和右外筒的油液相連便于產生一定相互壓力,左轉彎時同理可得。
車輛前后懸掛在受力不均時產生車身劇烈的俯沖和仰沖的姿勢[3],通過這套全輪互聯懸掛系統就可以遏制這個劇烈姿勢。假設現在在高速下急剎車造成懸架發生俯沖姿態,此時全輪互聯懸掛系統發生作用,首先由于懸掛俯沖姿態造成前減震器壓縮和后減震器拉伸形態,其主要形勢和抗側傾聯通方式大同小異,都是從壓縮的一方內筒和拉伸的一方外筒相連造成相反壓力緩和壓縮和拉伸,壓縮的外筒和拉伸的內筒相連造成負壓便于其油液互流,只是它作用的形式不同。
1.2 互聯減震器三維建模
利用Solidworks進行三維模型建立[4],利用拉伸、切除、掃描、薄壁功能畫出減震器外筒、減震器內筒、活塞、活塞桿、互聯管道。外筒是一個底面留內筒互通管接口直徑50 mm,側面留外筒互通管接口直徑50 mm,上側給活塞桿留出半徑62 mm的孔;內筒下端面留有50 mm的互通管接口孔,上端面封閉,但在上端下250 mm處有左右兩側流向外筒的直徑為100 mm的開孔;互通管按照互通管接口直徑等比例畫出。利用同心、重合功能裝配出一個減震器模型,先定位活塞和活塞桿同心和重合關系,再配合內筒和外筒同心和重合關系,然后再配合內筒和活塞桿同心關系,最后配合兩條互通管即完成裝配,如圖1所示。
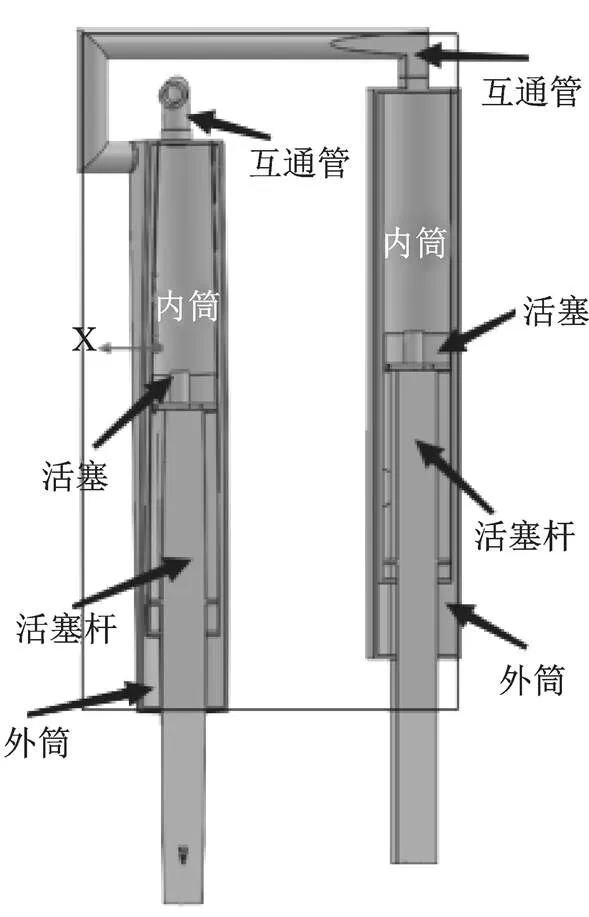
圖1 Solidworks三維模型
1.3 管道模擬流量分析
利用Flow Simulation模塊對Solidworks建立好的三維模型進行管道模擬流量分析,如圖2所示。假設油液不受壓力而壓縮變化,首先設定兩邊減速器入口速度為6 m/s,并在壓縮內筒和拉伸的外筒的互通管道處設兩個位置面設定為101 325 Pa、293.2 K,并設置目標求靜壓平均值、總壓平均值、平均速度值。觀察流動跡線可得在壓縮內筒和拉伸外筒的互通管某處是可能存在著一點使得他們壓力平衡的點。仿真結果得出在此處設定產生的兩個表面1和表面2的靜壓平均值分別為 101 325.00 Pa和101 325.00 Pa;平均速度數值分別為62.055 m/s和72.597 m/s;兩側平均密度(流體)分別為997.06 kg/m3和997.16 kg/m3;平均速度()分別為62.055 m/s和72.597 m/s;平均速度()分別為3.038 m/s和1.965 m/s;平均速度()分別為15.078 m/s和17.561 m/s;所設置的兩平面得出的數據相當接近,可得出在此設置平面附近存在著兩平面平衡處。
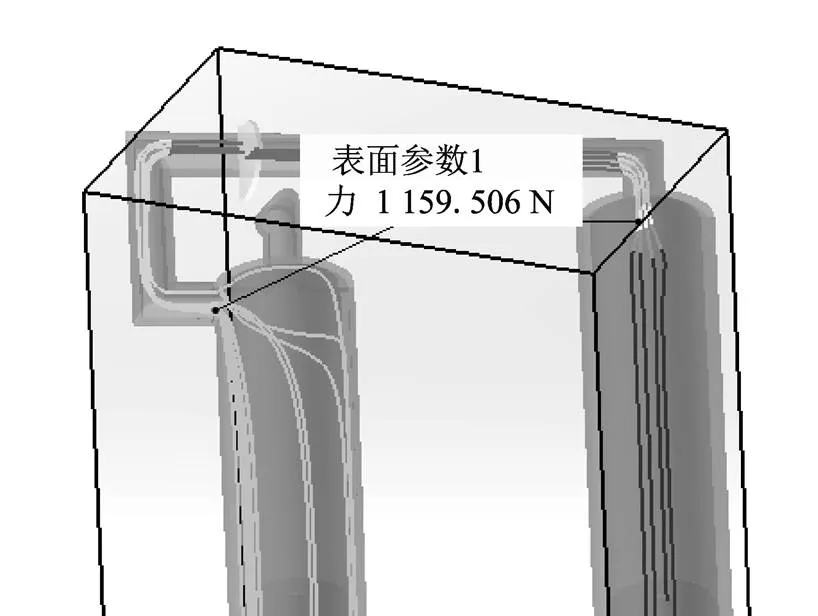
圖2 Flow Simulation管道模擬流量分析
假設該平衡點成立,分析該平衡點的平衡面得出該平衡面產生流體的速度非常接近,此時就非常有可能在此處互通管道中存在著壓力平衡面,則假設成立。
2 全輪互聯阻尼器的模型以及模糊控制原理
車身姿態控制通過獲取轉向角度傳感器,加速踏板傳感器以及減速踏板傳感器的信號得出駕駛員的行為意圖,并將傳感器具體參數傳輸至電子控制單元(Electronic Control Unit, ECU)利用模糊邏輯控制算法使用Simulink進行信號仿真,從而調整相應液壓管路的限流閥,以將車身姿態調整至預定車身姿態[5]。
利用AMEsim對整車物理模型與互聯阻尼器的液壓模型[6],液壓互聯懸架系統模型進行搭建。整車互聯阻尼器由互聯避震阻尼器、管路接口、液壓管路、控制閥門組成。可互聯避震阻尼器與減震彈簧作用于汽車懸架部分,液壓管路與阻尼器相連并可分成三個部分,抗側傾液壓互聯管路、抗俯仰液壓互聯懸架與抗垂向液壓互聯管路。抗側傾液壓油路、抗俯仰液壓油路與抗垂向液壓油路分別由限流電磁閥控制以用來調節液壓油路的通路,從而控制這三個方向的阻尼大小。分析側傾方向的液壓油路,若車輛需求為抑制側傾趨勢,其工作原理是將左側液壓缸的上油腔與右側液壓缸的下油腔相連,左側液壓缸的下油腔與右側液壓缸的上油腔相連,車輛右側傾時車輛左側液壓缸下油腔與右側上油缸聯通產生高壓,左側液壓缸上腔與右側液壓缸下腔聯通產生負壓,交叉液壓管路中的油壓差將產生一個作用于車身的抗側傾力矩,從而改善車輛側傾趨勢。同理,俯仰方向與垂向的控制原理相同。
模糊控制器的設計需要設計合理的輸入,車輛動態的改變源自于駕駛員的輸入,踩下加速踏板車輛加速便會使車輛重心后移,踩下剎車踏板便會使車輛重心前移,隨著方向盤轉動角的增加,汽車轉向趨勢的增加,側傾也會隨之增大,這些動態的改變伴隨著重量的轉移作用于阻尼器上。因此,想要通過全輪互聯懸掛對動態進行控制就需要檢測車輛加速踏板角度、剎車踏板角度與方向盤轉向角度,控制對應的抗俯仰、抗側傾和抗垂向互聯管路進行控制,對油壓進行實時控制。
互聯管路中的俯仰控制閥門由俯仰閥門模糊控制器控制,互聯管路中的側傾管路閥門由側傾閥門模糊控制器控制,互聯管路中的垂向控制閥門由車速模糊控制器控制。
首先定義變量,將車輛的剎車踏板位移輸入與車速輸入作為俯仰閥門模糊控制器輸入變量,側傾控制閥門開度作為輸出變量,采用二維模糊控制器進行控制。
輸入變量的模糊化,為了進行變量的模糊化處理,輸入變量必須從基本論域轉化到對應的模糊集論域,這需將輸入變量乘以相對應的量化因子。將量化因子定義為。
其次剎車踏板位移變化與車速高低均可反映駕駛員的駕駛意圖,剎車踏板位移數值越大,制動意圖越緊急,車速越高俯仰方向重量轉移越大,因此根據踏板位移與車速,與制動意圖成正比的原則,制定相應的模糊控制規則:
當車速為、剎車踏板位移為時,俯仰控制閥門開度為1;車速為、剎車踏板位移為時,俯仰控制閥門開度為1;車速為、剎車踏板位移為時,俯仰控制閥門開度為2;車速為、剎車踏板位移為時,俯仰控制閥門開度為3;車速為、剎車踏板位移為時,俯仰控制閥門開度為4。
車速為、剎車踏板位移為時,俯仰控制閥門開度為1;車速為、剎車踏板位移為時,俯仰控制閥門開度為2;車速為、剎車踏板位移為時,俯仰控制閥門開度為2;車速為、剎車踏板位移為時,俯仰控制閥門開度為3;車速為、剎車踏板位移為時,俯仰控制閥門開度為4。
車速為、剎車踏板位移為時,俯仰控制閥門開度為2;車速為時,剎車踏板位移為時,俯仰控制閥門開度為2;車速為、剎車踏板位移為時,俯仰控制閥門開度為3;車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為時,俯仰控制閥門開度為5。
車速為時,剎車踏板位移為時,俯仰控制閥門開度為3;車速為、剎車踏板位移為、俯仰控制閥門開度為3;車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為、俯仰控制閥門開度為5。
車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為時,俯仰控制閥門開度為5;車速為、剎車踏板位移為時,俯仰控制閥門開度為5;車速為、剎車踏板位移為時,俯仰控制閥門開度為5。
基于上述模糊子集,俯仰方向模糊控制器實時接收駕駛員踏板位移變化和車速變化確定俯仰控制閥門開度所處的模糊子集,基于模糊控制規則,可以得到其輸入與輸出關系,車速、剎車踏板位移、俯仰控制閥門開度關系如圖3所示。

圖3 車速、剎車踏板位移、俯仰控制閥門開度關系圖
同理,側傾模糊控制器的輸入變量為車速和方向盤角度,輸出變量為側傾閥門開度,定義方向盤轉向角度論域為[?50,50],方向盤轉向角度的模糊論域為=(?1,?(1?1)...,0,1,...,1?1,1),方向盤轉向角度的量化因子為;車速的基本論域是[40,120],車速的模糊論域為S=(0,1,..,2?1,2);車速的量化因子為,側傾控制閥門開度的基本論域是[0,1],模糊論域為:= (0,1,...,3-1,3),側傾控制閥門開度的量化因子為,輸入變量的量化因子等于=1/max 、=2/max輸出控制量的比例因子等于=max/3,將方向盤轉向角度的模糊論域并劃分為負大()、負中()、負小()、負極小()、零()、極小()、小()、中()、大()九個模糊子集,車速分為極小()、小()、中()、大()、極大()五個模糊子集,俯仰控制閥門開度并劃分為極小(1)、小(2)、中(3)、大(4)、極大(5)五個模糊子集,并定義隸屬函數為三角形隸屬函數。并劃分為極負大()、負中()、負小()、負極小()、零()、極小()、小()、中()、大()九個模糊子集。
建立模糊控制規則,當車速為、方向盤轉向角度為時,俯仰控制閥門開度為1;車速為、方向盤轉向角度為時,俯仰控制閥門開度為1;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為1;車速為、方向盤轉向角度為、俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4。
車速為、方向盤轉向角度為時,俯仰控制閥門開度為1;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4。
車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為2;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5。
車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為3;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5。
車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、剎車踏板位移為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為4;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5;車速為、方向盤轉向角度為時,俯仰控制閥門開度為5。
將其輸入模糊控制箱中便可得輸入與輸出關系,車速、方向盤轉向角度、俯仰控制閥門開度關系如圖4所示。
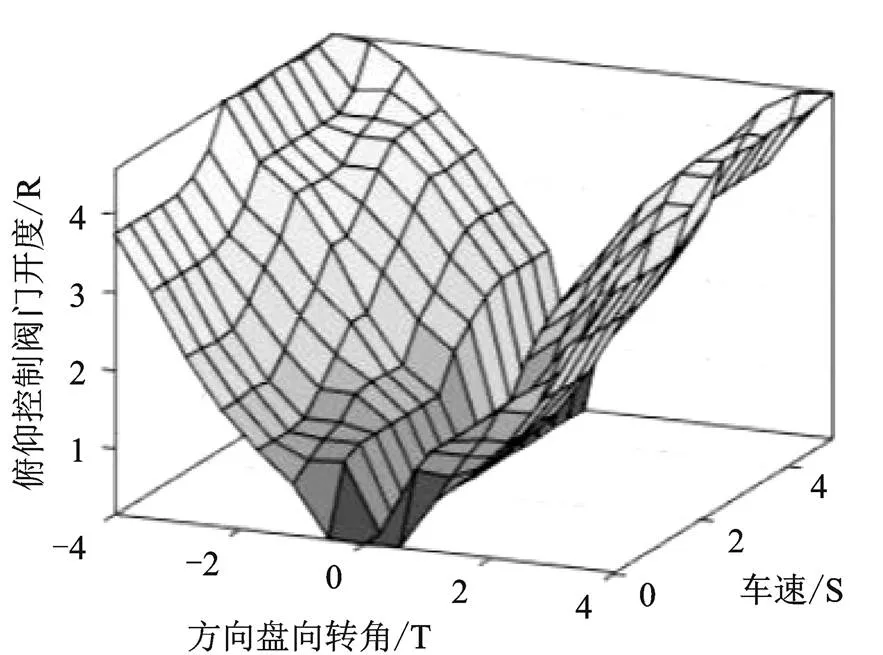
圖4 車速、方向盤轉向角度、俯仰控制閥門開度關系圖
3 試驗與分析
使用AMESim所搭建的整車物理模型和互聯阻尼器模型與Matlab進行聯合仿真。首先AMEsim中外接的車速、方向盤轉角、剎車踏板位移的數據接口對車輛行駛時的所屬狀態進行輸入。再利用AMESim中建立聯合仿真的接口,將轉向盤角度、剎車踏板位移與車速作為Simulink控制模塊的輸入,俯仰閥門、側傾閥門和垂向閥門的位移作為輸出。
利用Matlab創建模糊控制模型,將搭建好的模糊控制器導入到模型當中,將AMESim中輸出的車速與方向盤角速度信號輸入到模糊控制中,模糊控制的輸出連接至AMESim模型的輸入中,建立起聯合仿真,仿真結束后,得到仿真結果。
仿真實驗設置兩種模擬場景,蛇形繞樁,緊急剎車進行測試。
蛇形繞樁仿真測試結果:設置仿真車速為 40 km/h,方向盤輸入值設置為50°,并以0.15 Hz頻率進行蛇形繞樁測試,得出懸掛高度數據,系統開啟前,車身方向轉換的回彈高度為29.71 cm,壓縮高度為9.83 cm,系統開啟后回彈高度降至28.56 cm,壓縮高度提高至11.20 cm,可換算成回彈行程減少1.15 cm,壓縮行程減少1.37 cm,側傾角度減小。
緊急剎車仿真測試結果:設置仿真車速為 40 km/h,后緊急剎車至0 km/h,得出懸掛高度數據,系統開啟前,緊急剎車狀態下前后輪平均高度差為42.68 cm,系統開啟后,前后輪平均高度差為33.14 cm,系統開啟后平均高度降低9.54 cm。
通過對比蛇形繞樁,緊急剎車的仿真結果得出結論,全輪互聯懸掛系統相較于普通底盤結構的系統擁有更優越的性能,懸掛系統通過對車身姿態數據檢測,并通過模糊控制器反饋給阻尼控制系統可以改善汽車的行駛舒適性和駕駛平穩性,滿足優化性能的設計目的。
4 結束語
針對主動液壓懸掛進行了研究并進行改進,使其可以與制動系統和傳動系統進行信息互通,再通過液壓阻尼器互聯特定管路控制的方式實現了車輛的主動可調功能,通過仿真實驗表明,全輪互聯懸掛系統在汽車制動或拐彎時的慣性引起彈簧變形時,主動懸掛系統會產生一個與慣力相對抗的力,減少車身位置的變化,符合設計需求,并超越普通懸掛系統,可有效改善車輛穩定性。
主動液壓懸掛未來仍有可以探索的潛力。基于對目前液壓主動懸掛的探索和研究,坦克火炮上的雙向或三向穩定系統是十分值得借鑒的,其由陀螺儀、信號放大器、功率放大器、電機或液壓馬達、動力缸組成,并在垂直和水平方向上的電回路都存在獨立的陀螺儀,只要其感受到該方向上的干擾力矩影響火炮穩定,就會通過放大器觸發一個與之相反的力矩來糾正火炮角度。提升火炮穩定性,其原理同樣適用于家用轎車,若可將全輪互聯阻尼器與動力缸置換,并使懸掛系統具有主動活動能力,其可以實現功能的多元化。
[1] 王恩慧.汽車減震器的現狀及其發展趨勢[J].科技資訊,2021,19(12):78-80.
[2] 沈安誠.基于多智能體理論的橫向互聯空氣懸架協同控制研究[D].鎮江:江蘇大學,2020.
[3] 蔣連瓊,翁夢飛.汽車減震器的建模與模態分析[J].湖南文理學院學報(自然科學版),2017,29(4):36-39.
[4] 林德昭.集成式油氣減震器聯通工作模式的建模與動力學分析[D].泉州:華僑大學,2020.
[5] 穆增國.某型汽車減震器阻尼特性研究與結構優化設計[D].太原:中北大學,2021.
[6] 余一凡,陳雙.基于AMESim的不同結構液壓互聯懸架性能仿真分析[J].汽車實用技術,2022,47(3):120- 126.
Design of All-wheel Interconnected Suspension System
SHAN Weicong, FENG Wendi, ZHOU Jinwei*
( College of Mechanical and Electrical Engineering, Guangdong Baiyun University, Guangzhou 510450, China )
In recent years, the automobile industry has developed rapidly. With the support of national strategic goals such as carbon neutralization and carbon peaking, electric vehicles are increasing. With the large capacity battery, the vehicle weight will increase while bringing long endurance, and the vehicle stability and comfort will decrease accordingly.The all-wheel interconnected suspension described in this paper studies how to improve the vehicle's driving stability and comfort.The damper of the whole vehicle is connected through the hydraulic pipeline, and the flow is controlled by the flow limiting valve.By identifying the driving attitude of the vehicle and the driver's intention, the pressure of the specific pipeline is adjusted, so as to improve the damping under specific circumstances, and reduce the vehicle's roll pitch without losing the vehicle's comfort, thereby enhancing the vehicle's stability and improving the vehicle's handling.
All-wheel interconnected suspension;Fuzzy control;Experimental analysis;Vehicle's stability
U463.33
A
1671-7988(2022)23-77-06
U463.33
A
1671-7988(2022)23-77-06
10.16638/j.cnki.1671-7988.2022.023.014
單煒聰(2000—),男,研究方向為AWIS全輪互聯懸掛系統設計,E-mail:13902648598@163.com。
周金偉(1990—),男,碩士,講師,E-mail:zhou03762011@sina.com。
2021年廣東省大學生創新創業訓練計劃項目(S202110822037X)。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
流程工業(2022年3期)2022-06-23 09:41:08
中國石油石化(2021年8期)2021-07-20 07:36:12
煤氣與熱力(2021年3期)2021-06-09 06:16:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
智富時代(2018年5期)2018-07-18 17:52:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
