基于不同空間尺度測站網的BDS-3 GEO衛星軌道機動實時監測
2022-12-26 03:46:06苗亞格涂銳洪菊劉明玥
全球定位系統 2022年6期
苗亞格,涂銳,3,洪菊,劉明玥
(1.中國科學院國家授時中心,西安 710600;2.中國科學院大學,北京 100049;3.中國科學院精密導航定位與定時技術重點實驗室,西安 710600)
0 引 言
北斗三號衛星導航系統(BDS-3)星座由24 顆中圓地球軌道(MEO)衛星,3 顆地球靜止軌道(GEO)衛星和3 顆傾斜地球同步軌道(IGSO)衛星共同組成[1-2].由于GEO 衛星和IGSO 衛星的地球同步特性,需要頻繁進行軌道調整.此前數據統計,GEO 衛星可能每月進行一次軌道機動,IGSO 衛星大概每半年進行一次軌道機動[3-4].軌道機動是指利用衛星自身的推進系統,對衛星軌道進行校準,使其回到預設的軌道之中,而衛星播發的導航電文是由地面監測站數據與衛星軌道模型預報所得.因此,在軌道機動期間,衛星的實際位置與預報的軌道位置相差數十公里[5],這將對導航定位產生至少數十米誤差[6].實時準確地探測到衛星的機動時間和軌道機動狀態,可以及時對定軌及定位、導航和授時(PNT)服務策略進行調整,也有助于精密星歷的恢復.
近年來,一些研究人員提出了不同的方法來探測軌道機動.TU 等[4]提出了一種結合歷元差分速度估計原理和BDS 多站觀測的監測模型,可以實時估計軌道機動的三維動態變化.李濤等[7]提出了一種基于預報誤差分布擬合的軌道機動檢測方法.HUANG 等[8]提出了一種基于偽距觀測、廣播星歷和已知臺站坐標的優化魯棒檢測方法.王慶瑞等[9]提出了一種基于概率判決模型的軌道機動檢測方法,可對脈沖小推力作用下發生的軌道機動進行探測.YE 等[10]利用機動前后的軌道差分來探測軌道機動,但其探測僅用于軌道機動恢復后的時刻.這些研究并未針對BDS-3 衛星進行驗證.
本文利用基于歷元差分測速原理的監測模型[4],通過組建不同空間尺度的測站網,對BDS-3 的C59和C60 2 顆GEO 衛星的歷史機動事件進行了分析,最終給出了有價值的結論.另外,由于C61 衛星處于在軌測試狀態,因此本文并未對其進行分析.
1 軌道機動監測算法
當測站觀測到的衛星不少于4 顆時,利用載波相位歷元差分(TDCP)測速原理可以獲得測站的三維速度與接收機鐘差變化的時間序列.當測站為靜態站,且衛星數據正常時,所測得的測站速度理論值應該為零.然而,在軌道機動過程中,由于衛星實際位置與星歷位置有較大偏差并且存在快速的調整過程,計算出的測站速度將會有較大偏差[11].基于此原理,如圖1所示,當測站觀測到至少4 顆衛星時.利用TDCP 測速算法可以得到測站接收機的實時鐘差變化,當至少3 個測站同時追蹤到待監測衛星時,便可以實時監測衛星軌道的動態變化.
圖1 衛星軌道機動實時監測流程圖
本節首先介紹了基于TDCP 測速原理的接收機鐘差解算方法,然后給出了待監測衛星軌道三維動態變化的計算過程及機動時間段的探測方法.
1.1 基于TDCP 的接收機鐘差變化解算
載波相位的觀測方程可以表示為[12]

式中:λ 為載波相位波長;φ 為載波相位觀測值;ρ 為衛星到接收機的幾何距離;c為光速;δTr為接收機鐘差;δTs為衛星鐘差;Tion、Ttrop分別為電離層誤差和對流層誤差;N為整周模糊度;ε 為其他模型化誤差、非模型化誤差以及測量噪聲.采用無幾何相位組合、MW (Melbourne-Wübbena)組合和偽距相位組合對周跳進行探測,探測閾值均為經驗閾值.對式(1)載波相位觀測方程進行相鄰歷元間差分
式中,Δ 為歷元間單差算子.進行差分運算后,消除了整周模糊度的影響,消弱了電離層誤差與對流層誤差.通過建模消除對流層誤差,用廣播星歷為衛星鐘差進行改正[13],并用雙頻無電離層模型消除電離層誤差[14].利用Saastmoinen 模型和全球投影函數(GMF)得到了對流層干分量延遲和部分濕分量延遲,并采用分段常數估計法計算對流層剩余天頂濕分量延遲.忽略改正后的各項殘余誤差,可將差分方程改寫為

式中,α、β 為雙頻無電離層組合的系數,其值為


式中,Sti、rtj分別為衛星和接收機在ti、t j時刻下的坐標矢量,為單位矢量.再令rt2=rt1+Δr,則可將式(5)改寫為

當可用衛星不少于4 顆時,聯立式(3)、式(6),利用最小二乘法即可求得接收機歷元間鐘差變化估計值.
1.2 監測衛星的軌道變化估計
當至少3 個測站追蹤到監測衛星s時,可得以下觀測方程.然后進行歷元間差分運算,聯合1.1 節所解的接收機鐘差變化估計值,即可得到每一采樣時刻監測衛星的真實軌道與廣播軌道位置之差.除以采樣率可得三維動態變化率.其中,各誤差處理方法與1.1 節相同.

1.3 監測衛星軌道機動判斷
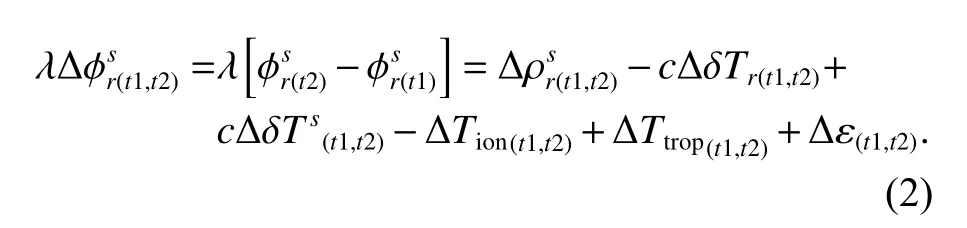
如圖2所示,選擇測站MKEA、MIZU、NNOR對2022年第153、154、155 天C59 衛星進行監測,廣播星歷顯示第154 天9~15 h C59 衛星為不健康.通常情況下,在同一采樣區間內,衛星真實軌道與廣播軌道之間的位置之差應該接近于或等于0 值,此時廣播軌道即為衛星真實軌道.然而,在衛星發生軌道機動時,其真實軌道與廣播軌道將產生較大偏差,軌道之差將遠離零值.據此可判斷監測衛星發生了軌道機動.
圖2 2022年第153—155 天C59 衛星真實軌道與廣播軌道之差的變化率圖
圖3展示了發生軌道機動時3 個測站的觀測值減計算值(OMC)時間序列.OMC 可由式(8)計算,其中,fOMC表示OMC 的時間序列,為的初值.可以看出,在沒有軌道機動發生時,各測站的OMC 值趨于0,且較為平穩,當發生軌道機動時,OMC 值逐漸增加.基于此,可以利用OMC 值來對軌道機動的開始與結束時間進行探測.定義式(9)為軌道機動監測條件,其中S為動態閾值,其值為每小時前10 個歷元OMC 值的標準差,作用域為當前小時第11 個歷元至下一小時前10 個歷元.表示對測站網中第 個測站的 取絕對值運算.為軌道機動識別因子,當從 時刻開始連續5 minifOMCfTH(t)t=ti fTH(t)≥0ti t=tjfTH(t)≤0tj均成立時,時刻即為軌道機動開始時間.相反,當從 時刻開始連續5 min 均成立時,時刻即為軌道機動結束時間.最后,取3 組探測結果的最早機動開始時間與最晚機動結束時間作為本測站網所探測到的衛星機動時間段.
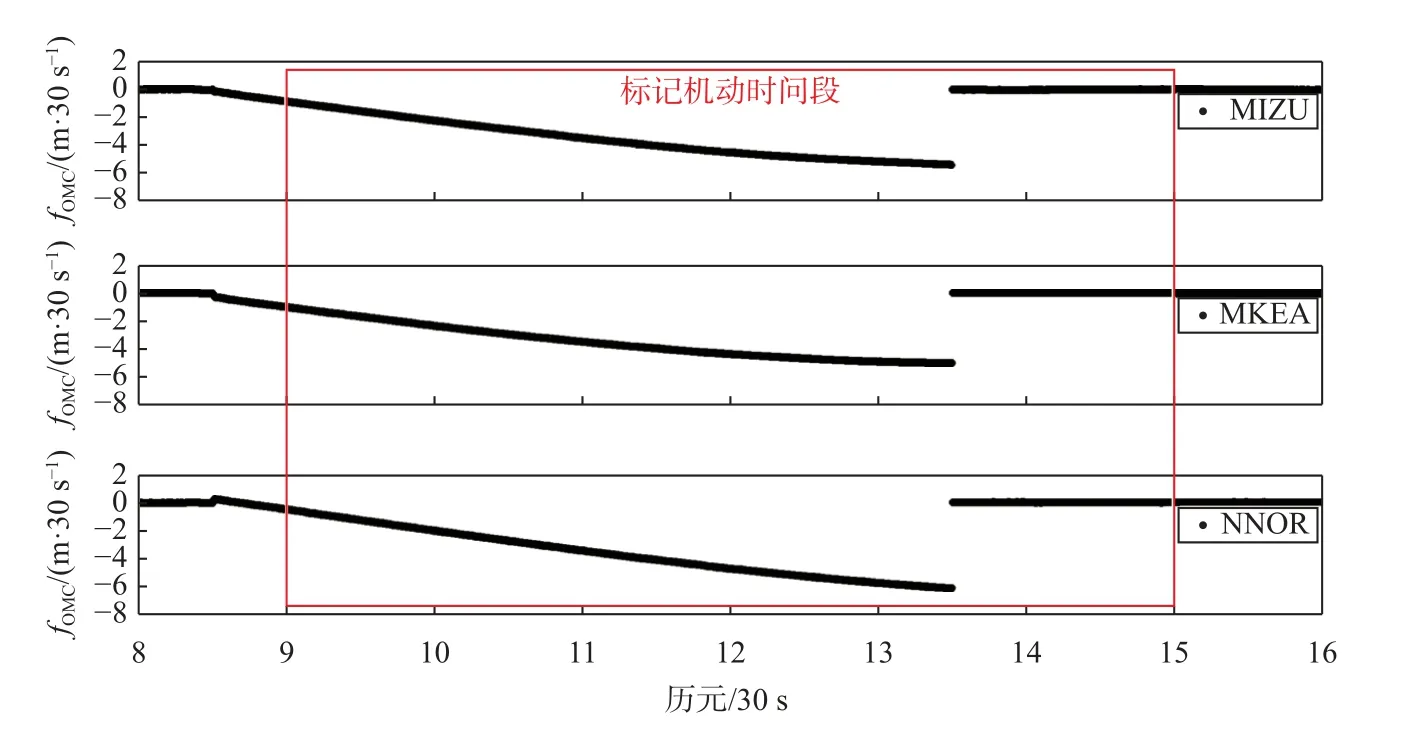
圖3 2022年第154 天C59 衛星軌道機動中各測站OMC 值變化圖(紅色方框為廣播星歷標記軌道機動時間段)
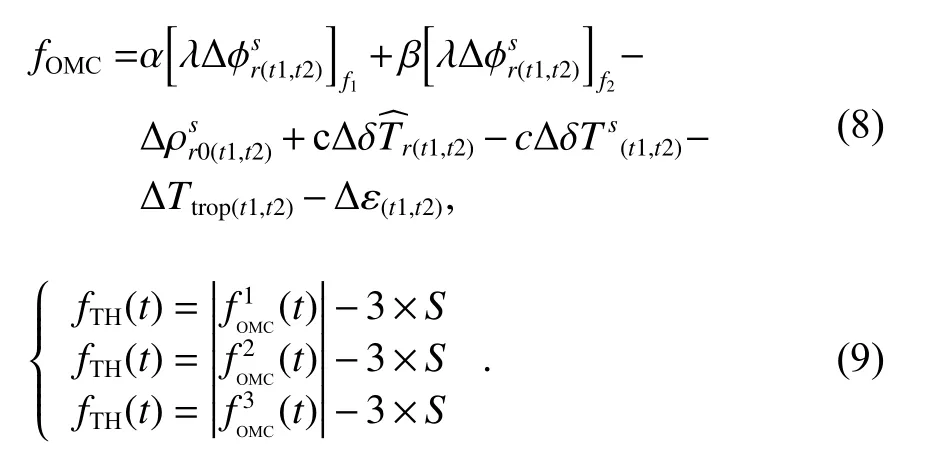
表1為基于3 個不同測站OMC 值所探測到的軌道機動時間對比.各測站所探測到的機動時間有很小的差異.根據上述機動探測算法可得,此次C59 衛星軌道機動時間為08:23:30—13:30:30.

表1 不同測站所探測到的C59 衛星2022年第154 天軌道機動時間對比
2 驗證及結果
2.1 數據來源
本文基于BDS-3 GEO 衛星星下點位置選取了11 個測站,分別組成大型、中型、小型三種不同空間尺度的測站網對BDS-3 C59、C60 衛星發生于2021-06—2022-06 之間的各12 次軌道機動事件進行了監測.圖4顯示了各測站分布情況,藍色、紅色、綠色實線分別將各測站連接為大型、中型、小型測站網.紅色五角星代表衛星星下點投影.表2顯示了各測站的詳細信息.
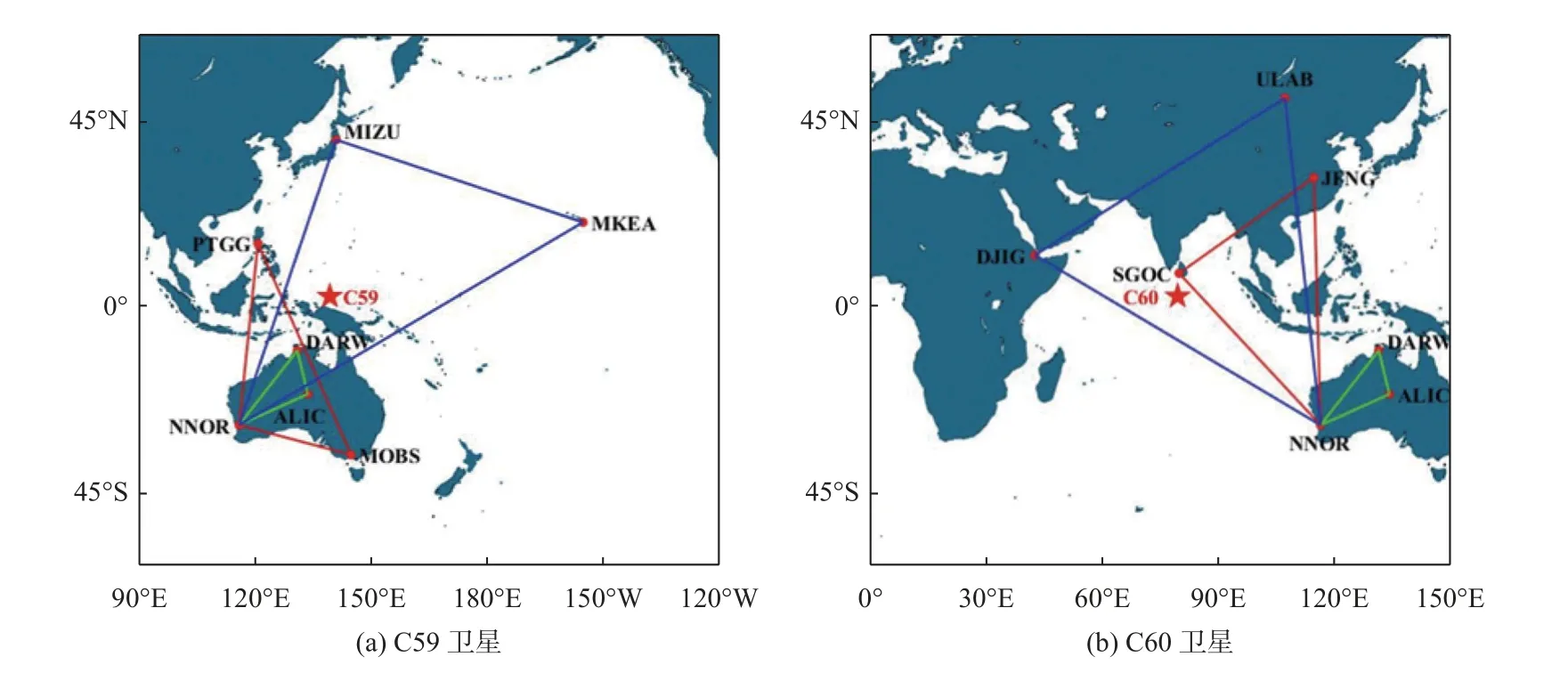
圖4 C59、C60 衛星軌道機動測站網空間分布圖
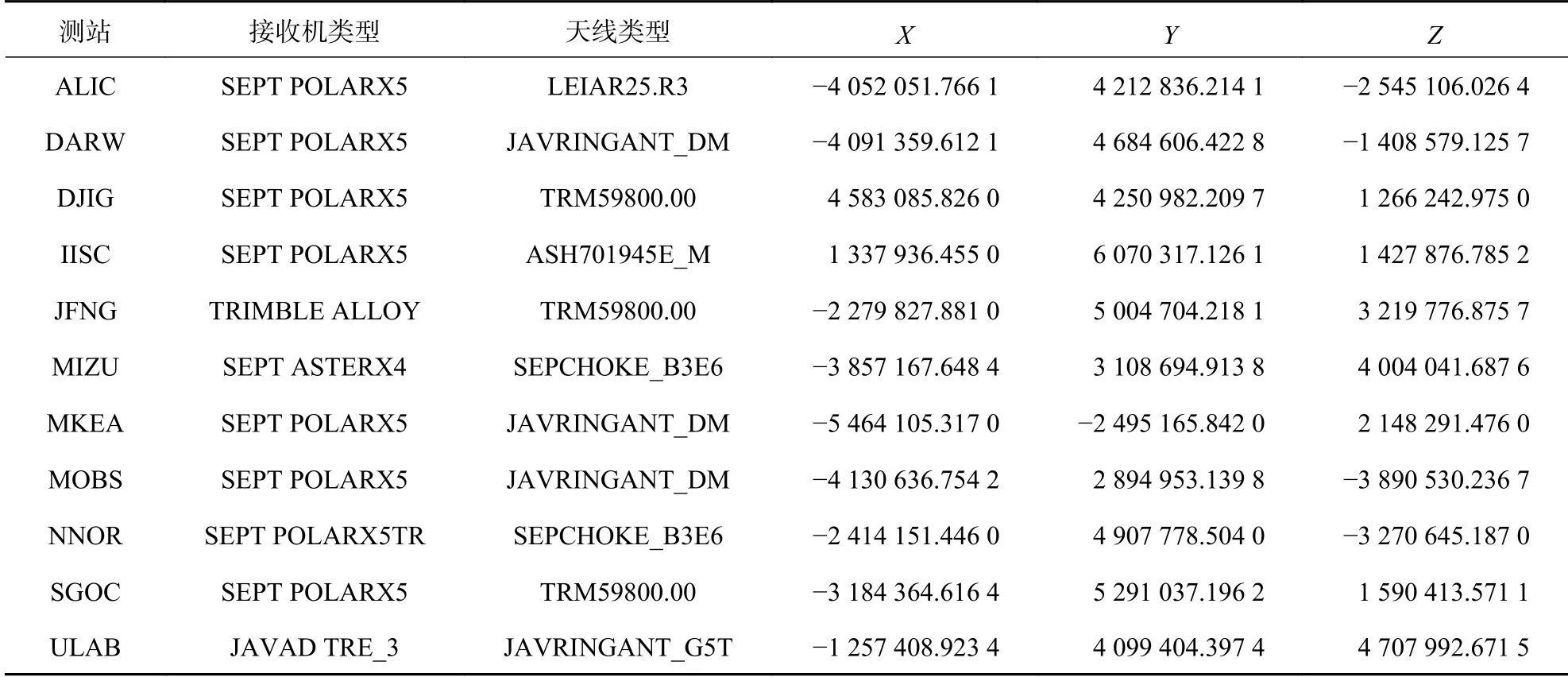
表2 所選測站詳情信息m
文中,觀測數據采樣間隔為30 s,廣播星歷和衛星相位中心改正數據來源于國際GNSS 服務中心(IGS),地球自轉參數(ERP)文件來自于瑞士伯尼爾大學的歐洲定軌中心(CODE).
2.2 不同空間尺度測站網下的軌道動態變化監測
為了驗證不同空間尺度測站網對同一機動事件中軌道動態變化監測結果的影響,本文以大型測站網為基準,將其監測結果分別于中型、小型測站網監測結果作差,并求差值的標準差時間序列.差值的標準差越小,說明二者相似程度越高.圖5~6 顯示了采用大型、中型、小型三種空間尺度測站網對C59、C60 衛星各三次歷史機動的監測結果.表3~4 分別列出了三種空間尺度測站網對C59、C60 衛星12 次歷史機動的監測結果對比情況.其中紅色字體為未發生軌道機動時的監測結果.
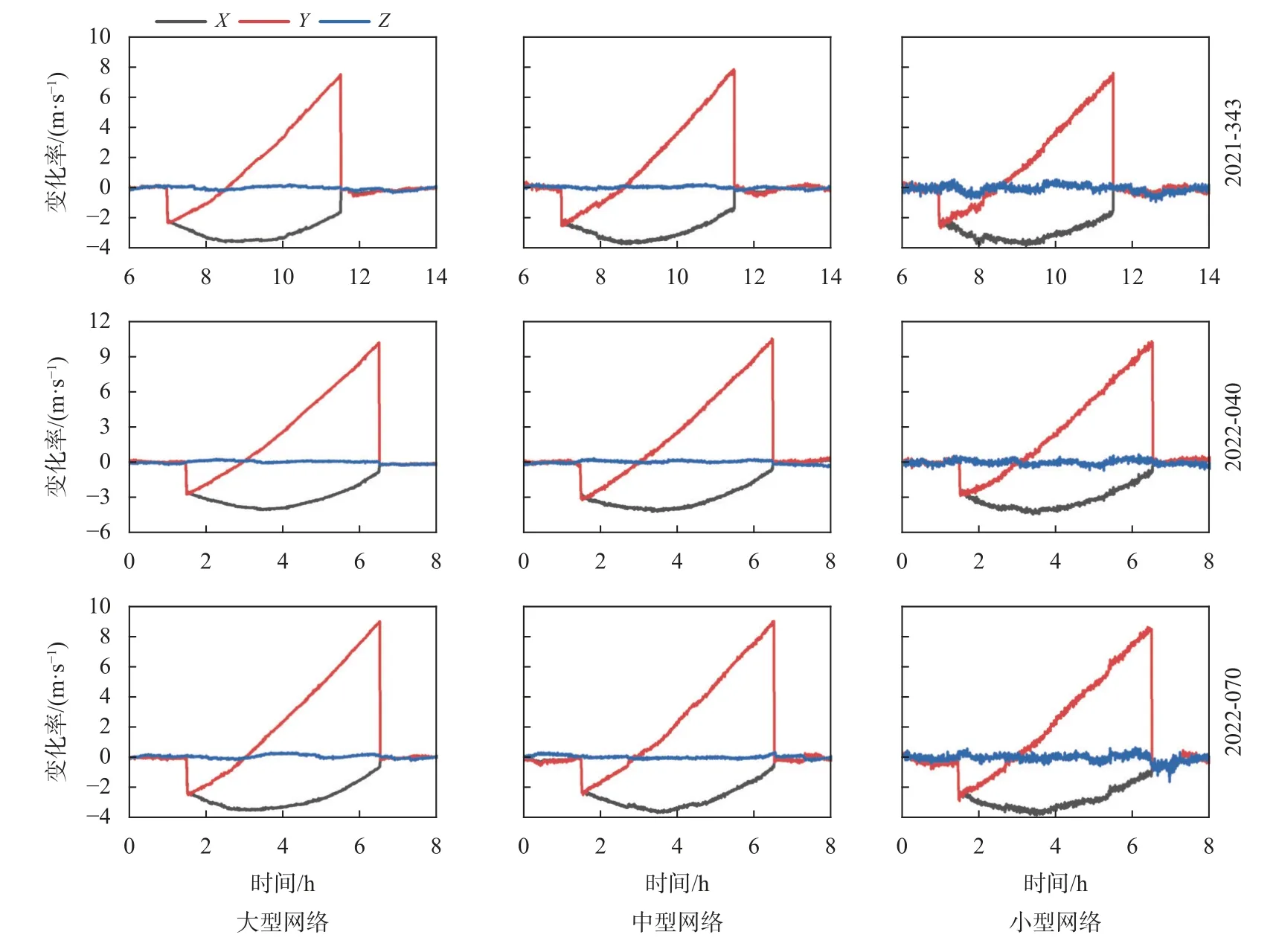
圖5 不同空間尺度測站網下C59 衛星機動期間軌道動態變化率圖(以分別發生于年積日2021-343、2022-040、2022-070 的三次機動事件為例)
結果表明,對于C59 衛星,不同尺度測站網所監測到的機動期間衛星軌道變化率曲線高度一致,表3中所列出的不同尺度測站網在連續12 次機動事件中的監測結果也均在正常值附近波動.因此,對C59 衛星的軌道機動動態監測并不受追蹤站位置與測站網空間尺度的影響.
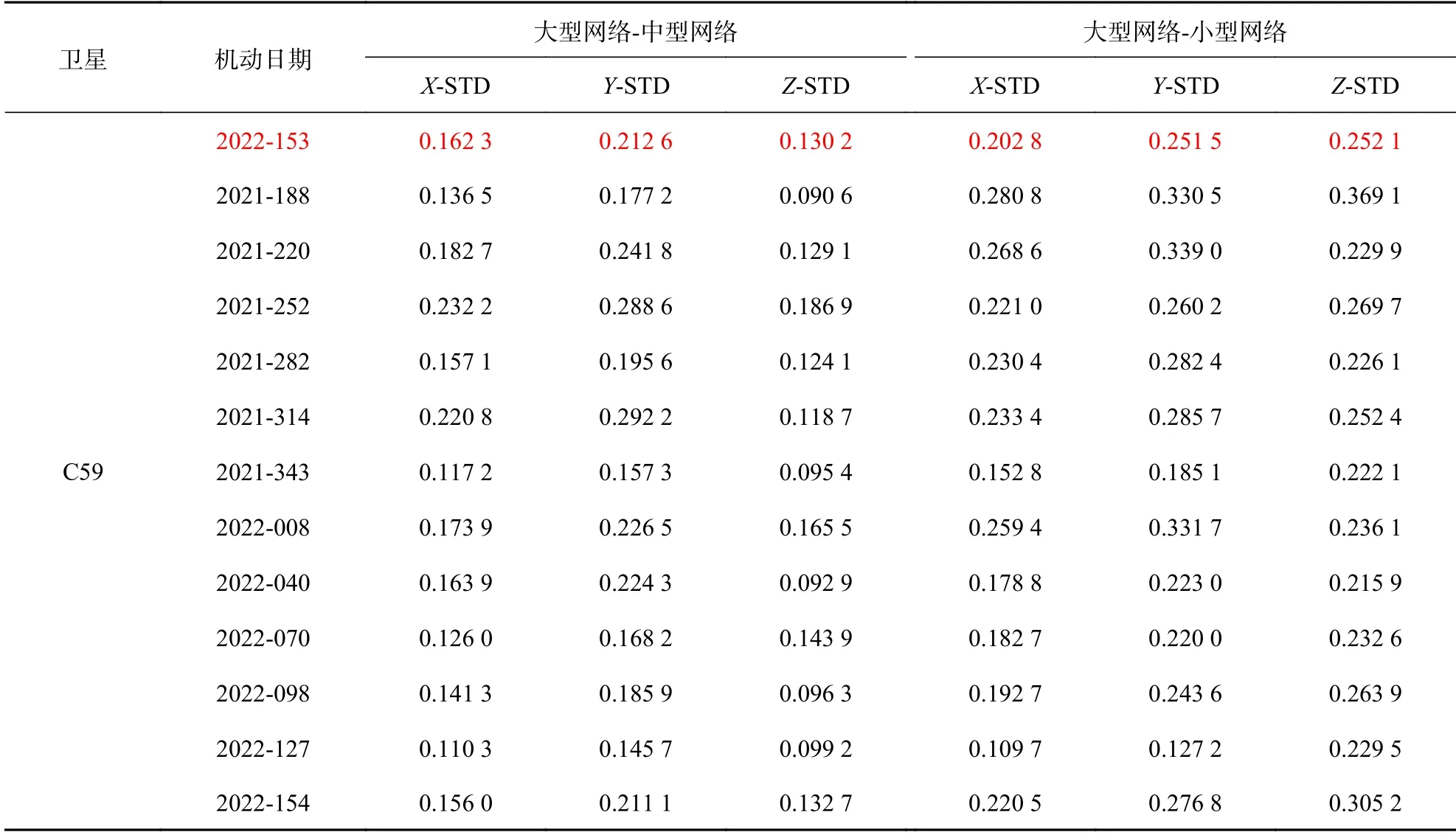
表3 不同空間尺度測站網對C59 衛星監測結果對比m
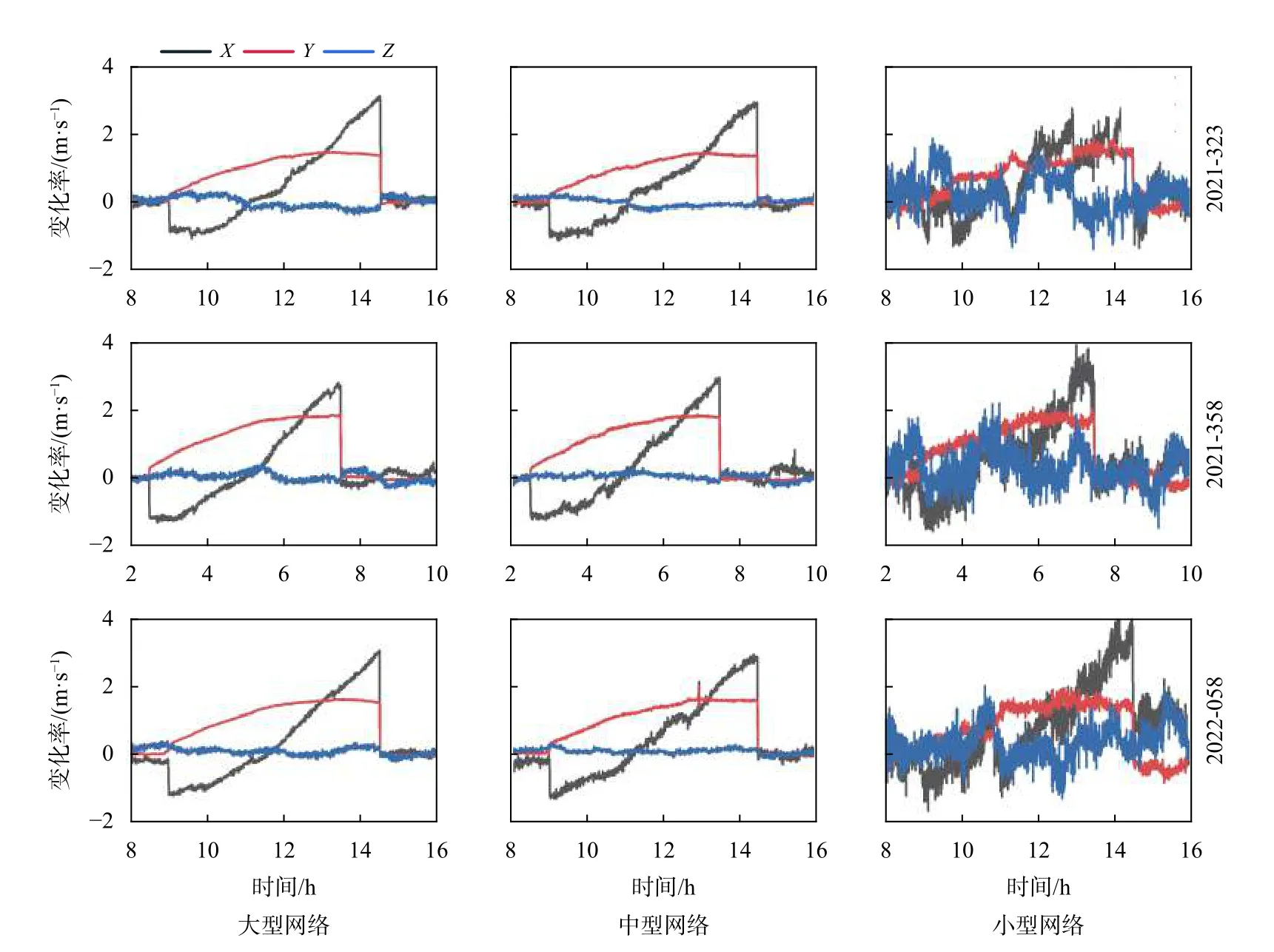
圖6 不同空間尺度測站網下C60 衛星機動期間軌道動態變化率圖(以分別發生于年積日2021-323、2021-358、2022-058 的三次機動事件為例)
對于C60 衛星而言,大型測站網與中型測站網的監測結果曲線幾乎完全一致,而在小型測站網的結果中表現出大量噪聲.通過觀察表4可知,在連續12 次機動事件監測中,三種尺度測站網的監測結果并未與正常值有明顯差異.因此,在使用該方法對C60 衛星進行軌道機動動態監測時,應當選取較大空間尺度的測站網.
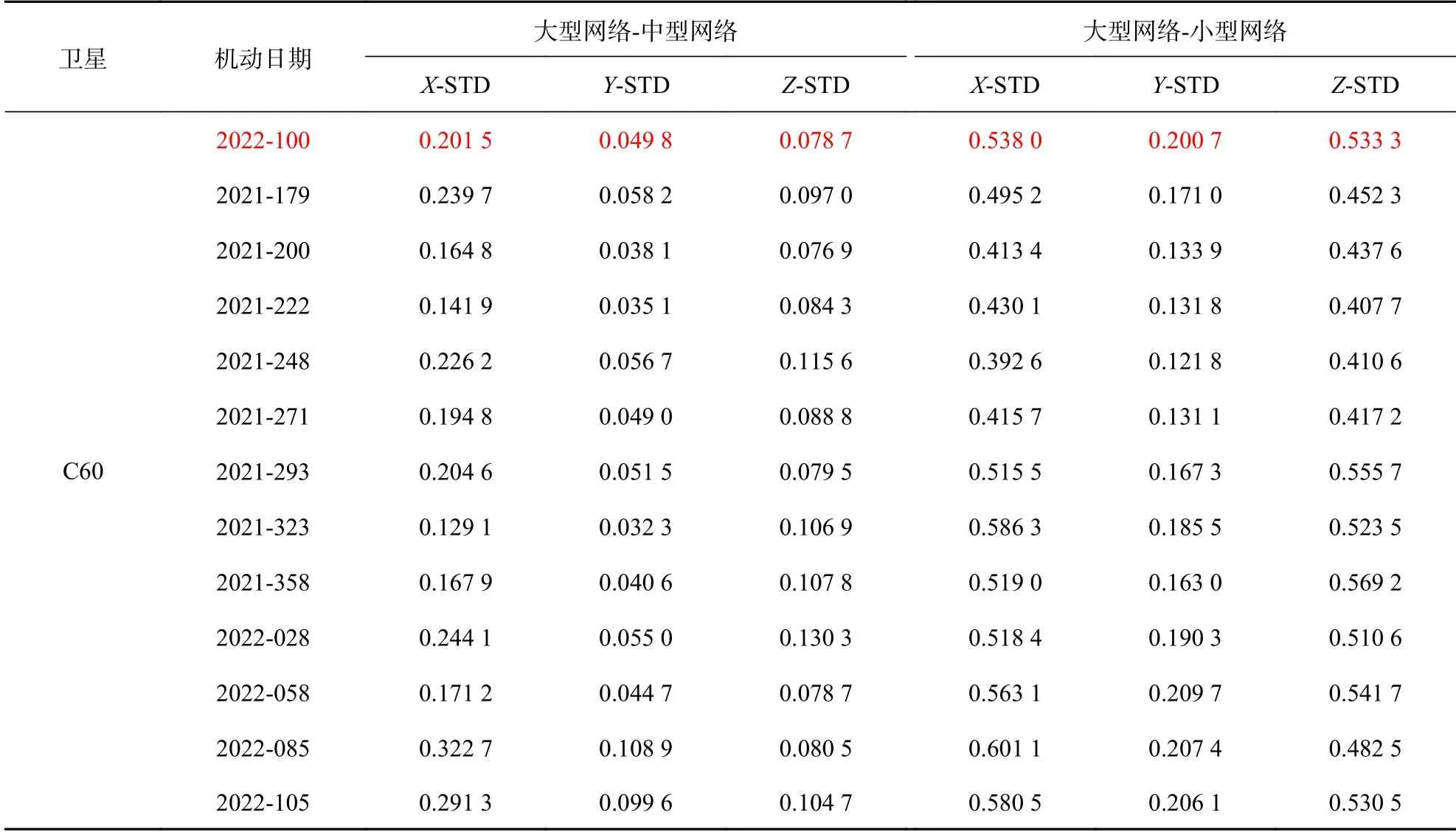
表4 不同空間尺度測站網對C60 衛星監測結果對比m
2.3 不同空間尺度測站網下的軌道機動時間探測
實時準確地對衛星軌道機動的開始時間與結束時間進行探測,可以有效提高衛星可用數據的利用率.圖7~8 分別展示了不同測站網所探測到的軌道機動時間段對比.圖中綠色點線表示廣播星歷標記機動時間,圖7(a)為標記開始時間,圖7(b)為標記結束時間.同樣以大型測站網探測結果為基準,將大型測站網所探測到的機動時段分別于中型、小型測站網探測結果作差,并將結果在表5~6 中呈現.
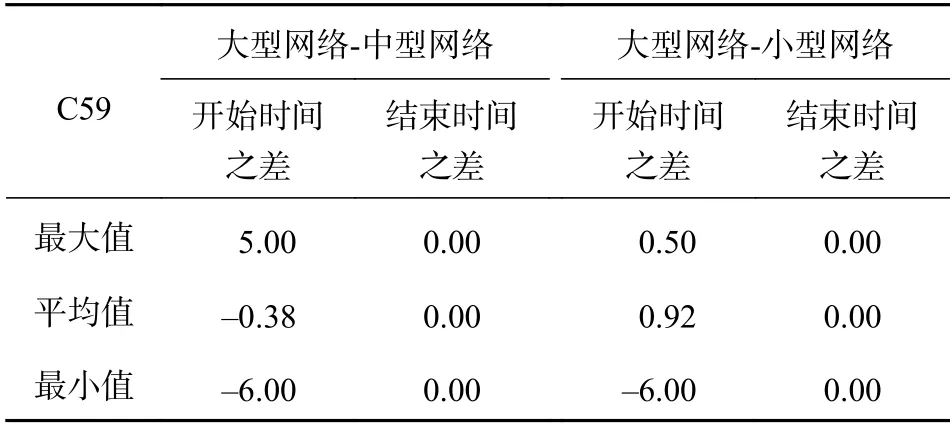
表5 不同尺度測站網對C59 衛星軌道機動時間的探測結果對比min
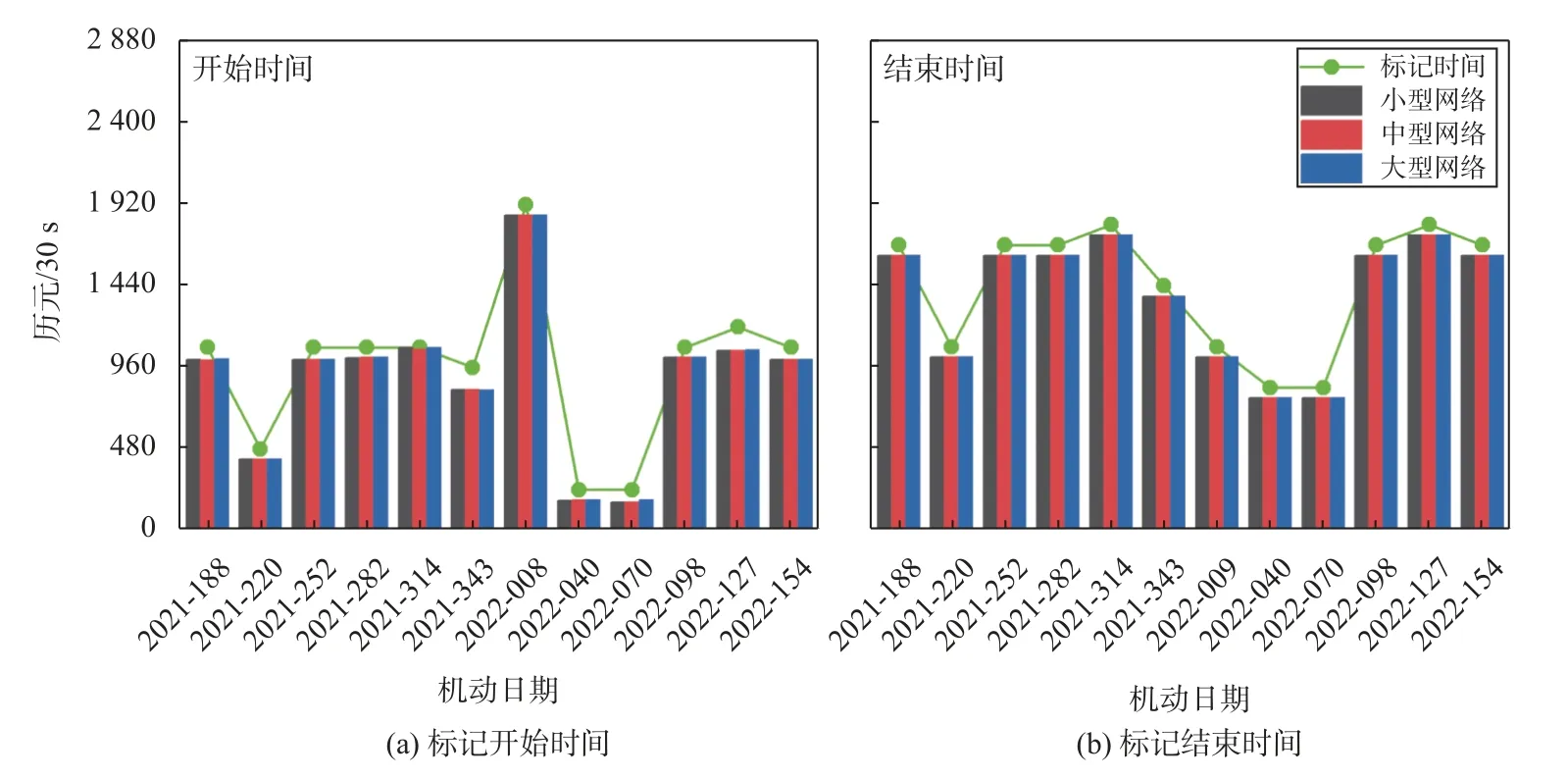
圖7 不同尺度測站網對C59 衛星軌道機動時間的探測結果對比圖
可以看出,對于同一次機動事件而言,不同尺度測站網所探測到的衛星軌道機動開始時間之差最大不超過6 min,平均不超過1 min.結束時間之差最大不超過1.5 min,平均不超過0.5 min,表現出良好的一致性.表明不同空間尺度測站網均能準確探測到BDS-3 GEO 衛星的機動開始與結束時間.
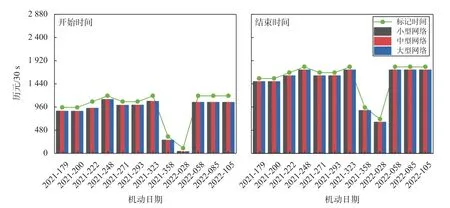
圖8 不同尺度測站網對C60 衛星軌道機動時間的探測結果對比圖
3 結束語
本文基于衛星星下點投影,共選取了11 個測站,分別針對BDS-3 C59、C60 衛星組建了不同空間尺度的大型、中型、小型測站網,并對C59、C60 衛星發生于2021-06—2022-06 之間的各12 次歷史軌道機動事件進行了監測.數據結果表明:在對BDS-3 GEO衛星進行軌道機動監測時,本文所選不同空間尺度的測站網均能實時準確地對機動開始時間與結束時間進行探測.同時,所選不同空間尺度測站網對C59 衛星機動過程中軌道動態變化監測結果基本一致.在對C60 衛星進行軌道動態變化監測時,所選空間尺度較大的測站網不容易受到噪聲的干擾,監測結果明顯優于小尺度測站網.另外,在未來可以考慮對IGSO衛星與MEO 衛星的軌道機動進行監測,以進一步驗證該方法的適用性.
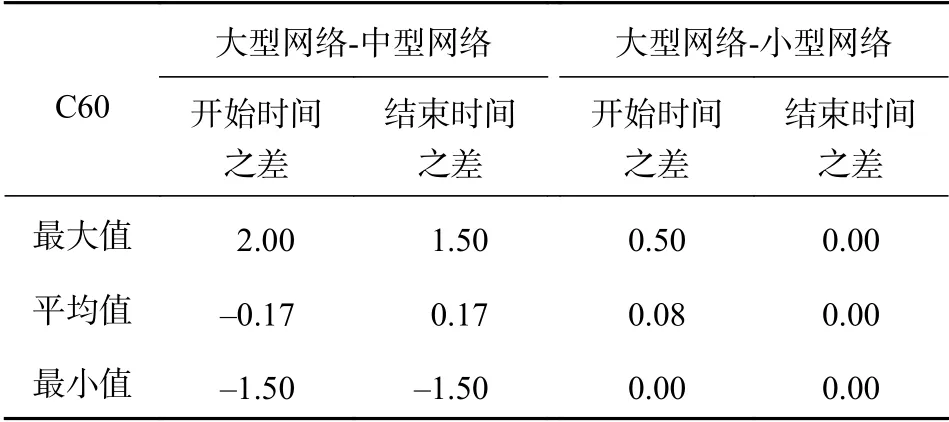
表6 不同尺度測站網對C60 衛星軌道機動時間的探測結果對比min