基于超聲波“一發(fā)射兩接收”模式的運動中測速新型算法
2022-12-22 06:07:04代沈雪薛名揚
科技創(chuàng)新與應(yīng)用 2022年35期
關(guān)鍵詞:測量
代沈雪,杜 增,薛名揚
(遼寧大學(xué),沈陽 110136)
近年來,隨著我國經(jīng)濟(jì)的高速發(fā)展,我國汽車產(chǎn)業(yè)迅速崛起。據(jù)工信部網(wǎng)站公布的統(tǒng)計數(shù)據(jù),2021年我國汽車年產(chǎn)量為2 608.2萬輛,銷售量為2 627.5萬輛,已經(jīng)連續(xù)7年位居世界首位。據(jù)中國政府網(wǎng)公布的相關(guān)信息,2021年全國汽車保有量為3.02億輛,汽車駕駛?cè)诉_(dá)4.44億人。根據(jù)中國統(tǒng)計年鑒公布的統(tǒng)計數(shù)據(jù),2020年我國發(fā)生交通事故24 467起,由交通事故造成的直接財產(chǎn)損失為131 360.6萬元。行車安全已經(jīng)成為關(guān)乎每個家庭和個人生活質(zhì)量的重大公共問題。如何通過技術(shù)手段不斷提高汽車駕駛的安全系數(shù),減少交通事故發(fā)生的概率,在發(fā)生交通事故后能夠為交管部門進(jìn)行交通違法行為判罰和交通事故責(zé)任認(rèn)定提供科學(xué)、準(zhǔn)確、客觀的數(shù)據(jù)信息等系列問題具有重要的實際應(yīng)用價值和社會意義,也是眾多汽車廠商和科研團(tuán)隊進(jìn)行技術(shù)研發(fā)的重點方向。日前,工信部要求自2022年1月起,新生產(chǎn)的乘用車必須配備符合GB 39732—2020《汽車事件數(shù)據(jù)記錄系統(tǒng)》規(guī)定的事件數(shù)據(jù)記錄系統(tǒng)(Event Data Recorder,簡稱EDR),也被稱為汽車黑匣子。EDR大多被集成安裝在安全氣囊控制單元(ACM)模塊內(nèi)[1]。當(dāng)車輛發(fā)生碰撞等突發(fā)情況導(dǎo)致速度劇烈變化達(dá)到閾值時,EDR系統(tǒng)將被觸發(fā)工作,自動記錄碰撞前、碰撞中及碰撞后3個階段數(shù)秒的汽車運行速度、縱向加速度、發(fā)動機(jī)轉(zhuǎn)數(shù)、剎車開關(guān)狀態(tài)和方向盤轉(zhuǎn)向角度等多方面關(guān)鍵數(shù)據(jù)[2]。目前,EDR系統(tǒng)只能在汽車速度發(fā)生急劇變化達(dá)到閾值時,才能被動觸發(fā)進(jìn)行記錄,且存在數(shù)據(jù)記錄容易被覆蓋、丟失等問題,更無法實現(xiàn)對車輛自身行駛狀態(tài)以及車輛以外其它車輛或物體的運行狀態(tài)進(jìn)行主動記錄等功能,不能主動有效規(guī)避交通事故發(fā)生風(fēng)險。
1 概述
一直以來,車輛行駛速度的測量和行駛軌跡的記錄在交通安全管控中具有極其重要的意義,但傳統(tǒng)的車輛行駛速度測量方式采用靜態(tài)測量平臺,即需要測量設(shè)備處于靜止裝態(tài)時才能實現(xiàn)對車輛運動速度進(jìn)行測量。如果能夠?qū)崿F(xiàn)測量設(shè)備在運動狀態(tài)下對迎面或周圍行駛的車輛等物體進(jìn)行速度測量及行駛軌跡記錄甚至行駛軌跡預(yù)判,一方面可以用來有效地減少或避免交通事故的發(fā)生,另一方面在交通事故發(fā)生后也可以為交通違法行為判罰和交通事故責(zé)任認(rèn)定提供科學(xué)、準(zhǔn)確、客觀的數(shù)據(jù)信息。因此,對于此類技術(shù)的研究具有極為重要的實際應(yīng)用價值和社會意義。
本文提出了一種在測量方與被測量方均處于運動狀態(tài)下的速度測量方案,在對實際問題中車輛等物體進(jìn)行簡化后,構(gòu)建了一個在二維平面內(nèi)運動狀態(tài)下進(jìn)行速度測量的新型測速模型。通過數(shù)學(xué)建模和實驗?zāi)M,計算得出了被測方的運動速度,在理論上驗證了這種測量方法的有效性,同時也為未來進(jìn)行多物體速度測量及描述被測物體運動軌跡做了準(zhǔn)備工作。
2 基本原理
首先,把在路面上行駛的汽車進(jìn)行模型化,將測量車與被測量車的位置關(guān)系投影到二維平面內(nèi)進(jìn)行模擬,根據(jù)此模型中物體間的幾何關(guān)系,計算出被測車相對于測量車的距離、速度等物理量。
目前,常見的測距或測距方法有激光、超聲波及紅外線等,在進(jìn)行理論建模和實際模擬時選擇使用了超聲波測距模塊,主要考慮到超聲波測量在技術(shù)上容易實現(xiàn)、操作相對簡單、適用范圍廣和受環(huán)境因素影響較小等優(yōu)點[3-5]。超聲傳感器測距模塊可以連接在單片機(jī)上,通過計算源聲波信號發(fā)送時刻和反射回波信號接收時刻的時間間隔并結(jié)合超聲波在空氣中傳播速度來獲取被測量物的距離信息,再連續(xù)對多次測量的結(jié)果進(jìn)行存儲、編程,可自動計算求得被測物體相對測量物體的運動速度等物理量[6]。本文采用的新型“一發(fā)射兩接收”超聲波測距測速模型,在實驗中是通過搭載單片機(jī)的智能小車機(jī)器人來實現(xiàn)的。2臺機(jī)器人小車間通過單片機(jī)實現(xiàn)實時通訊,被測方(對方)小車的單一發(fā)射器發(fā)射的一個超聲波信號被測量方(己方)小車的2個接收器接收后,可測得被測方(對方)小車分別相對測量方(己方)小車2個接收器的距離。再根據(jù)已知的2個接收器間距離,可構(gòu)成1個三角形的三邊關(guān)系,通過計算三角形三邊的數(shù)量關(guān)系并對測量和計算結(jié)果進(jìn)行存儲和編程,可以計算得到2個小車之間的相對距離和相對速度。結(jié)合測量方小車的定位模塊提供的位置、速度等信息,即可計算得到被測方小車的實時位置、速度乃至運動軌跡等信息。
3 所用傳感器模塊
在本模式中使用超聲波單體發(fā)射模塊和單體接收模塊,將2個超聲波接收裝置A、B分別安裝在己方小車的車頭左右,并將此簡化為測量方A、B點與二者之間的連線,將一超聲波發(fā)射裝置安裝在對方小車車頭前方中間,并將此簡化為被測方C點,如圖1所示。
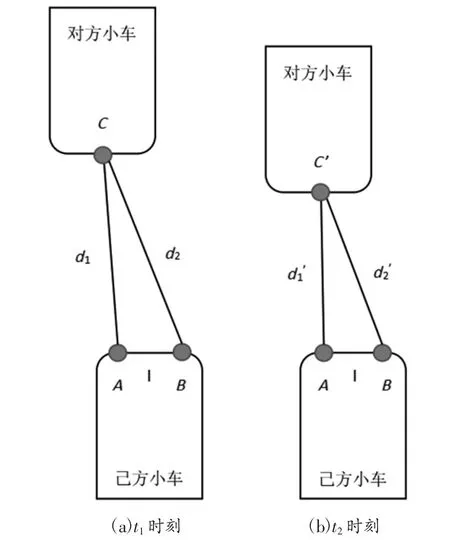
圖1 超聲波模塊安裝示意圖
本文使用光電槽型光耦傳感器進(jìn)行自身車速測量,槽型光耦也被稱作槽型光電開關(guān)或者對射式光電開關(guān)。此模塊由1對紅外線發(fā)射與接收管和光碼盤構(gòu)成。原理為發(fā)射管發(fā)射出的紅外線,當(dāng)沿檢測方向遇到障礙物(光碼盤反射面)時,則反射回來被接收管接收。這樣在電機(jī)所連的光碼盤旋轉(zhuǎn)過程中對紅外線實現(xiàn)阻斷和導(dǎo)通,可在接收管上感應(yīng)出電流變化并實現(xiàn)開和關(guān)的判別。由此得知碼盤所轉(zhuǎn)周數(shù)進(jìn)而計算出電機(jī)轉(zhuǎn)速和小車速度。
4 算法
在超聲波模塊持續(xù)測量過程中,選取一測量方得到距離測量結(jié)果的時刻t1和經(jīng)Δt之后,得到下一次距離測量結(jié)果的時刻t2,此時被測方所處位置由C點位移至C’點。則可知在t1時刻被測方C點距測量方A點距離為d1,距測量方B點距離為d2;在t2時刻被測方C’點距測量方A點距離為d1’,距測量方B點距離為d2’。測量方A、B 2點間距安裝時已確定為l。
以測量方A點為坐標(biāo)系原點,以測量方A點與測量方B點連線所在直線為x軸,建立(圖2)平面直角坐標(biāo)系。
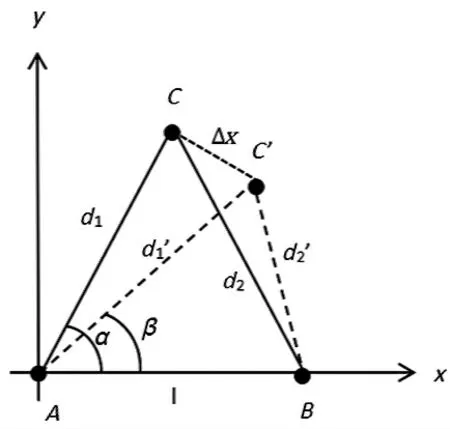
圖2 平面直角坐標(biāo)系下的測量模型
則t1時刻有
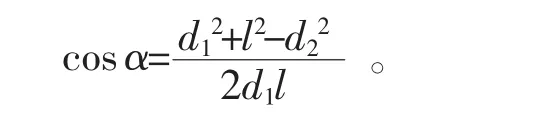
由本模式原理知,sinα>0,

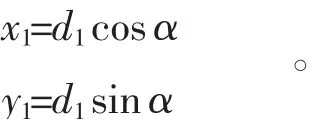
設(shè)C點坐標(biāo)為(x1,y1),有
t2時刻有
由本模式原理知,sin β>0,

設(shè)C’點坐標(biāo)為(x2,y2),有
在Δt時間內(nèi),將測量方視為靜止,由于Δt很小,近似地將被測方視為直線運動,可得Δt時間內(nèi),被測方發(fā)生的位移為C點與C’點間距離為

此時可求得被測方運動的平均速度,并將此近似為瞬時速度,而此速度實際上是測量方與被測方的相對速度,有
將相對速度v沿x方向與y方向分解(圖3),
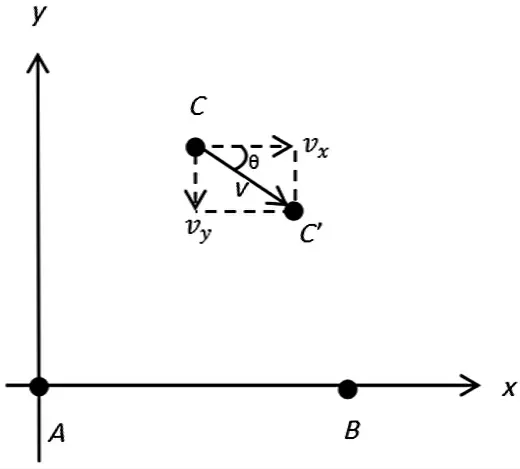
圖3 相對速度分解
得
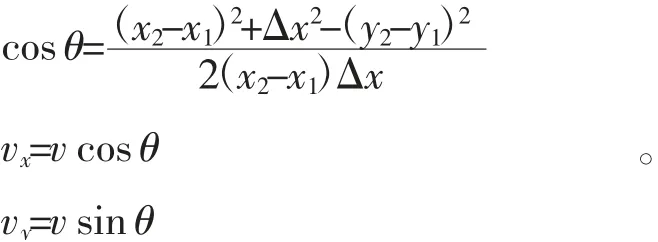
規(guī)定以x軸正方向為x軸速度分量正方向,以y軸正方向為y軸速度分量正方向。根據(jù)測量方A、B點連線上任一點的速度在x軸上的分量vx′與在y軸上的分量vy′,可算出被測方的實際速度vc為

本次速度測量結(jié)束后,立刻會進(jìn)入下一次的速度測量,如此循環(huán)進(jìn)行即可測得被測物的實時速度。
5 誤差
5.1 所用測量模塊誤差
5.1.1 超聲波模塊距離測量誤差
本模式氣介狀態(tài)下影響超聲波測距精度的主要因素有:壓力、環(huán)境的溫度、介質(zhì)均勻是否穩(wěn)定。其中超聲波對溫度的變化更為敏感,當(dāng)處于有溫度梯度的環(huán)境或進(jìn)行補償時溫度測量誤差大則超聲波測量誤差也會比較大。而在實際恒溫環(huán)境下,經(jīng)監(jiān)測發(fā)現(xiàn)超聲波模塊仍可傳回一些不準(zhǔn)確數(shù)據(jù)。導(dǎo)致此情況的主要因素有:環(huán)境的噪聲、落葉等隨機(jī)飄動物體、目標(biāo)體上其他構(gòu)件或表面不平整等。尤其是在顛簸道路上行進(jìn)時非常容易出現(xiàn)上述情況[7]。
5.1.2 槽型光耦轉(zhuǎn)速測量誤差
利用槽型光耦進(jìn)行轉(zhuǎn)速測量時產(chǎn)生誤差的主要原因有:器件抗干擾能力差、自身攜帶誤差、傳感器安裝精度不高和入射角度不正確等。尤其是在強光直射場所中應(yīng)用時應(yīng)有適當(dāng)遮擋,當(dāng)傳感器處于煙塵、水霧較大或是電磁干擾環(huán)境中時,也會產(chǎn)生較大誤差。
5.2 方法誤差
在3次連續(xù)對被測方的測距中,Δt時間內(nèi),將測量方視為靜止,由于Δt很小,近似地將被測方視為直線運動,而實際情況下,被測方并不一定是理想地直線運動。此外,求得被測方運動的平均速度并將此近似為瞬時速度,實則忽略了被測方實際瞬時速度。由此2個將產(chǎn)生方法誤差,其大小主要取決于Δt的大小,根據(jù)微元思想,Δt越小,則此誤差越小。
實際上帶來誤差的因素還應(yīng)包含單片機(jī)的數(shù)據(jù)計算處理速率、超聲波測速模塊和槽型光耦測速模塊數(shù)據(jù)傳輸回單片機(jī)的時效性和對應(yīng)性等。
6 結(jié)束語
以交通軌跡記錄與預(yù)判研究為背景,提出了一種新型速度測量算法,即測量方與被測方均處于運動中時,測量方對被測方速度進(jìn)行測量的一種模式。此模式打破了常規(guī)方法的一方處于靜態(tài)才能進(jìn)行速度測量的局限,為與智能碰撞警告等模塊結(jié)合并應(yīng)用于車載軌跡鑒定系統(tǒng)提供可能。本模式也可應(yīng)用于開拓手持測速儀等測速儀器的功能。
實現(xiàn)交通軌跡記錄與預(yù)判能夠在行車過程中異常情況發(fā)生當(dāng)時智能地作出警告以提醒駕駛員或當(dāng)即采取一定措施阻止交通事故發(fā)生,保護(hù)生命財產(chǎn)安全;此外,當(dāng)事故發(fā)生后,也能夠為事故原因分析提供依據(jù)[8]。此模式不僅是探究交通運動軌跡記錄與預(yù)判的基礎(chǔ),對于交通事故責(zé)任判定有直接重大意義,而且對于有同樣速度測量需求的各類研究、應(yīng)用也有促進(jìn)意義。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
