基于模型整體逼近的機械臂RBF網絡自適應控制
2022-12-08 05:28:58黃杰
裝備制造技術 2022年9期
黃 杰
(重慶交通大學機電與車輛工程學院,重慶 400074)
0 引言
工業機械手臂是一種自動操作裝置,可以模擬人類手和手臂動作實現某些功能。因此,廣泛應用于機械制造等制造領域的生產[1-3]。一方面,人類不大愿意從事重復性工作,喜歡善于進行戰略思考。此時機器人的作用就凸顯出來了,它們就可以代替人類從事這些工作。因此,一些基于活動級控制的機械工業手臂可以充分發揮兩者的優勢:操作者只需要指定機器人需要做什么、完成什么工作內容,機器人只需要負責完成一步步的指令,最終就把任務完成了。這樣,一個工人就可以操作多個機器人展開有序工作,從而就可以減少所需人數,大大降低項目成本[4]。隨著科技的不斷發展,機器人在人類的生活隨處可見,例如:機器人在軍事、醫學、農業、工業上的廣泛應用。機器人的出現將會用更少的勞動力去保質保量完成既定的工作,完成一些人類無法完成的事[2]。這些工業機器人和人一樣由手臂和手指組成,可以代替人類從事機械化和自動化的繁重工作,甚至這些工作有可能是在危險條件下進行,因此,工業機械手臂被廣泛應用于機械、冶金、電子等行業,輕工業和原子能[5-6]。
以工業機械手臂為研究對象,利用拉格朗日數學原理建立了兩自由度工業機械手臂的動力學模型。針對二自由度工業機械手臂設計了基于模型整體逼近的機械臂RBF網絡自適應控制器,并且基于s函數在Matlab中創建了Simulink控制圖。采用模型整體逼近的機械臂RBF網絡自適應對機械臂的軌跡跟蹤性能進行了仿真并且驗證了控制算法的有效性。
1 基于模型整體逼近的機械臂RBF網絡自適應控制
神經網絡廣泛地應用于系統不確定項的辨識。文獻[7]使用神經網絡對時變的機械臂動力學系統中的不確定項進行了辨識,由此提高了控制精度;文獻[8]使用神經網絡對套索傳動系統進行辨識,調高了套索傳動的跟蹤精度。因此,可以使用神經網絡對柔性機械臂動力學系統中的柔性耦合非線性項進行辨識,然后以內控回路的方式對輸入力矩進行補償。文獻[9-10]的創新之處在于它將柔性機械臂等效為柔性梁模型,這大大簡化了模型的復雜性。其次利用假設模態法建立了柔性機械臂伺服系統的動力學方程。在動力學的建模過程中將重力因素加以考慮。
我們以工業機械手臂系統的動力學模型為:
2 基于模型不確定部分的RBF網絡逼近
采用RBF逼近不確定項f,那么神經網絡模型的輸出為設計的控制率為
控制率取:τ=(x)+Kv r-v,魯棒項v取:v=-(εN+bd)sgn(r),被控對象中的(fx)取(fx)=M(q)ζ(1t)+C(q,)ζ(2t)+G(q)+F()。其中,ζ(1t)=+,ζ(2t)+Λe。
3 控制器的收斂性分析
從圖1可以看出,在基于模型整體逼近RBF網絡自適應控制下,關節1在1.3時能夠較為精確跟蹤期望軌跡,0~1 s過程中抖動較大,最大超調量為0.032 rad。關節2在1.4時能夠較為精確跟蹤期望軌跡。0~0.8 s過程中抖動比較大,最大超調量為0.028 rad。
圖2顯示了基于模型整體逼近的自適應RBF網絡控制所獲得的兩個驅動力相對穩定,且平滑,無需大抖動,由于采用RBF神經網絡對系統進行無限精度逼近,不確定項(f)項能夠有效地補償軌跡控制誤差,減少系統不確定性因素對系統的影響。
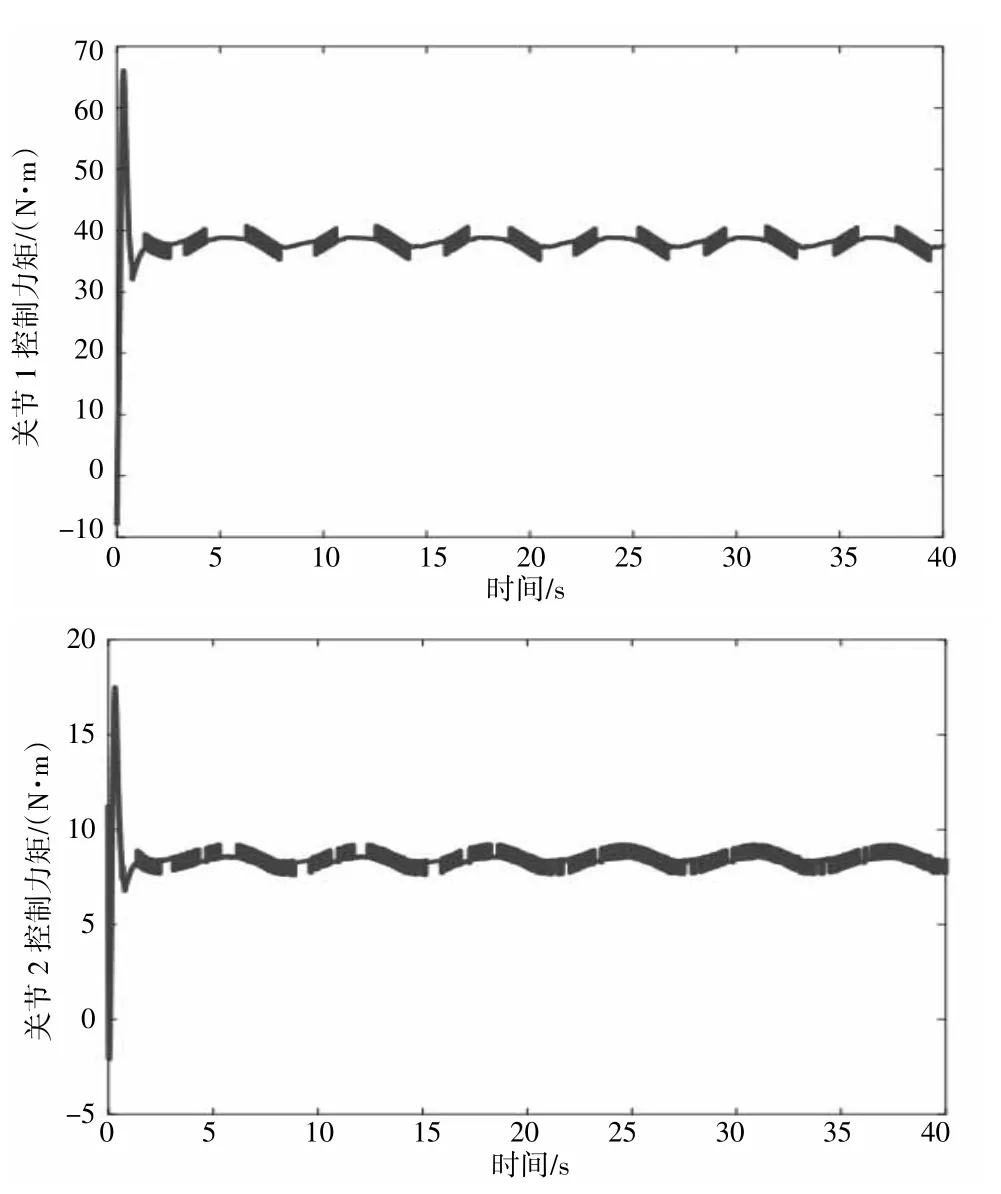
圖2 關節1與關節2驅動力矩
由圖3RBF網絡對于不確定項及其估計值的逼近結果可以看出,不確定項在0~2下降得非常厲害,當2 s以后不確定項及其估計值始終維持在40~42內波動,從而極大減小了不確定項對于工業機械臂在工作過程中的干擾。
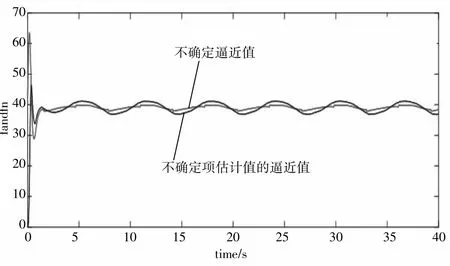
圖3 對于不確定項及其不確定項估計值的逼近結果
4 結語
研究了工業機械臂工作過程中的軌跡控制補償算法偏差大、魯棒性差、效率低跟蹤控制問題,根據李亞普諾夫穩定性原理,設計了一種基于模型總體逼近的RBF網絡自適應控制,由于實際的制系統中模型建模的不精確會導致控制性能的急劇下降,因此本文提出對模型不精確部分進行逼近。并利用RBF神經網絡對系統的不確定項進行了補償,得到了RBF網絡自適應控制。通過仿真實驗得到如下結論:
(1)基于模型整體逼近的機械臂RBF網絡自適應控制使得工業機械臂在工作工程中具有更精確的軌跡跟蹤控制。控制性能得到了提高,提高了系統的學習速度,因而能夠得到較理想的控制效果。
(2)RBF網絡自適應控制使得工業機械臂對于外界的干擾具有更高的魯棒性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
電腦報(2020年35期)2020-09-17 13:25:53
數學物理學報(2020年2期)2020-06-02 11:29:24
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
光學精密工程(2016年6期)2016-11-07 09:07:19
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49