直線電機進給系統自適應反演滑模控制研究
2022-12-08 05:26:50戚厚軍胡高峰董云龍
裝備制造技術 2022年9期
張 昭,戚厚軍,胡高峰,董云龍
(1.天津職業技術師范大學 機械工程學院,天津 300222;2.天津市高速切削與精密加工重點實驗室,天津300222.)
0 引言
永磁同步直線電機(PMLSM)憑借響應速度快、推動力大、結構簡單、行程不受限制、控制精度高以及易操作等優勢,被廣泛應用于精密與超精密機床等自動化設備領域[1]。直線電機進給系統作為機床的主要核心部分,由于沒有任何中間環節,導致由外部擾動和參數攝動等產生的不確定性擾動因素都將直接作用到電機上,嚴重影響直線電機進給系統控制性能,傳統的PID控制難以滿足其控制性能需求。目前對于直線電機的控制策略主要有PID控制、人工神經網絡控制、自適應控制、模糊控制、滑模變結構控制等[2]。由于算法的局限性,僅僅依靠單一的控制算法難以達到預期效果。為此,為提高進給系統運動控制性能,在建立直線電機進給系統數學模型的基礎上,充分考慮外部擾動和參數攝動對系統的影響情況下,提出了自適應反演滑模控制策略,通過仿真結果進一步驗證了該策略的有效性。
1 PMLSM數學模型
在建立直線電機數學模型前,將直線電機理想化:假設忽略直線電機端部效應、空間諧波、鐵心飽和磁滯損耗,在d-q兩相旋轉坐標系下,采用id=0的矢量控制[3],直線電機數學模型為:

式中,uq為q軸電壓;R為動子電阻;iq為q軸電流,Lq為q軸動子電感;v為電機速度;τ為電磁磁距;φq為q軸磁量;Fe為電磁推力;Kf為電磁推力系數;M為動子質量;B為黏滯摩擦系數;F為系統受到的擾動因素,包括參數變化、負載擾動等。
假設某一狀態下直線電機動子的位移為x(t),當控制變量為q軸電流時,直線電機進給系統的狀態方程為:
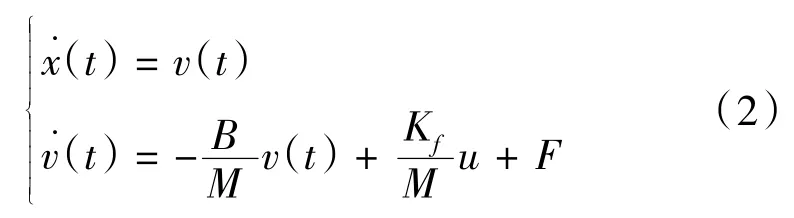
式中,u為系統控制輸入。
根據(2)式搭建直線電機傳遞函數框圖,如圖1所示。
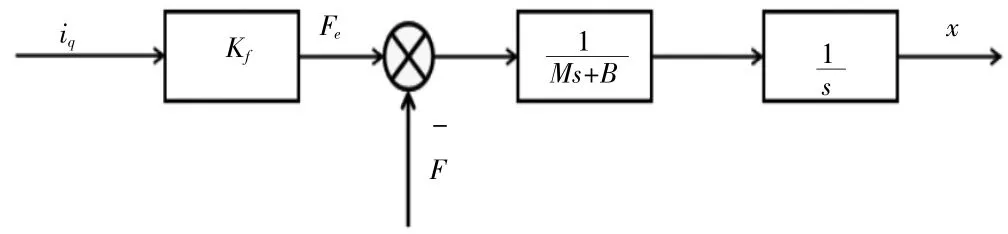
圖1 直線電機傳遞函數框圖
忽略系統受到的干擾,得到其傳遞函數:

2 反演滑模控制器設計
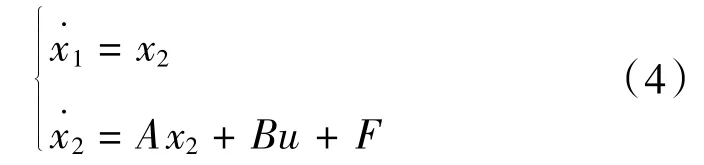
將PMLSM狀態方程簡化為:
根據反演滑模控制的設計思想和相關理論,主要分三個步驟完成控制器的設計與穩定性分析[4]:
步驟1:
定義位置跟蹤誤差e1并對其求導:
定義切換函數s:

式中,k>0。
定義虛擬控制量e2:

定義Lyapunov函數并對其求導:
若e2=0,那么是與有關的二次函數,則≤0,根據Lyapunov穩定性理論需進行步驟2設計。
步驟2:
定義切換函數s并對其求導:

式中,c>0。

定義Lyapunov函數:

對上式求導得到:

定義Lyapunov函數并對其求導:

設計自適應反演滑模控制律u為:

自適應律設計為:

步驟3:
穩定性分析:

因此,自適應反演滑模控制在李雅普諾夫意義下是大范圍漸進穩定的。
3 仿真分析
在MATLAB軟件中的Simulink模塊中搭建PMLSM伺服系統仿真模型并進行仿真研究,驗證所提控制策略的有效性,主要各項仿真參數見表1。
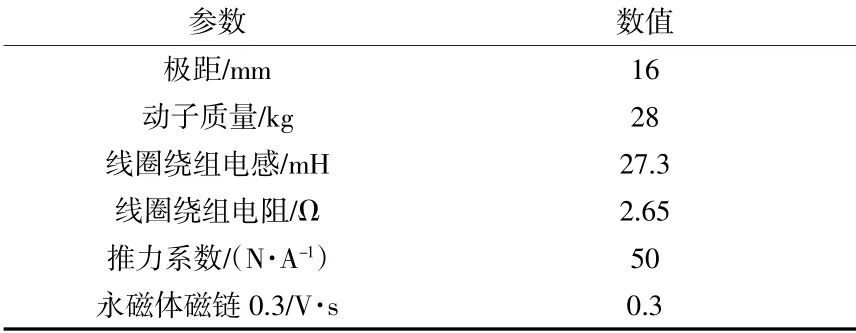
表1 仿真參數
多次調整制器中的多項參數直至仿真結果符合預期所要達到的效果,仿真波形圖如圖2、圖3所示。
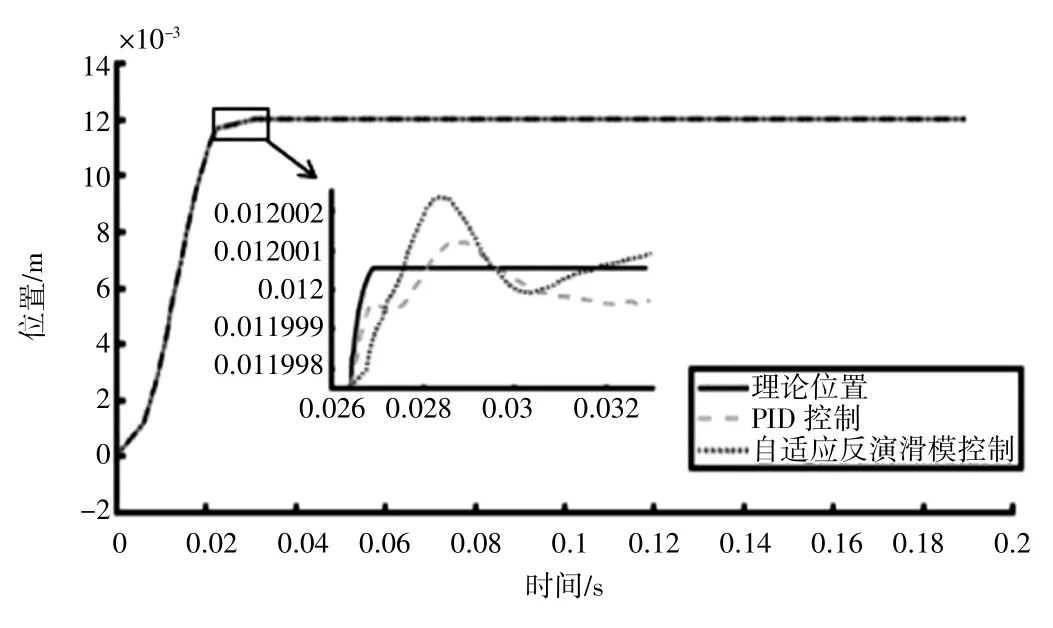
圖2 位置響應曲線對比圖
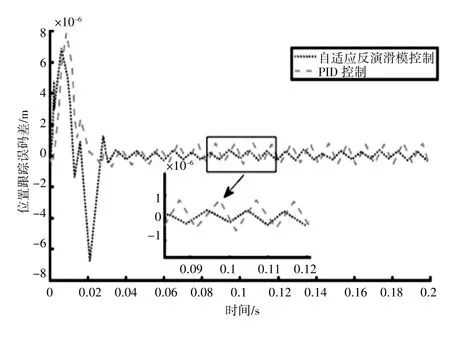
圖3 位置跟蹤誤差對比圖
根據表2仿真數據結果分析,PID控制和自適應反演滑模控制對比,直線電機響應時間從0.0288 s減小到0.0272 s,提高了5.5%;最大動態誤差從8.13 μm減小到6.96 μm,提高了14.4%;穩態誤差也顯著減小。因此通過仿真結果可以驗證自適應反演滑模控制策略能夠有效減小系統跟蹤誤差,加快系統響應速度。

表2 仿真結果
4 結語
針對PMLSM進給系統的非線性,多變量、強耦合性的特點,考慮到外部擾動和參數攝動的影響,提出了一種自適應反演滑模控制策略。采用反演滑模控制方法,將復雜的耦合的分線性系統分解成締結子系統,同時引入自適應控制律估計系統受到的干擾,使控制器既能提高進給系統動、靜態性能的同時減小系統輸出抖振。經仿真驗證,所提出的方法可以有效加快系統響應速度和提高位置跟蹤精度。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
山東青年(2016年1期)2016-02-28 14:25:25
當代修辭學(2014年3期)2014-01-21 02:30:44