基于模糊層次分析法-熵權法-博弈論的換刀機器人安全性評估
2022-12-08 05:25:34蘇翠俠林賚貺張博文
裝備制造技術 2022年9期
蘇翠俠,林賚貺,張博文
(1.中國鐵建重工集團股份有限公司,湖南 長沙 410100;2.中南大學機電工程學院,湖南 長沙 410083)
0 引言
盾構機是集光、機、電、液于一體的大型掘進施工設備[1]。盾構機在掘進過程中,需頻繁更換滾刀[2],而人工換刀作業難度大、危險性高[3],因此,利用換刀機器人代替人工換刀已經成為盾構換刀技術新發展趨勢[4]。換刀機器人在換刀過程中的安全性評估具有復雜性、模糊性等特點,許多指標難以通過定量方式進行評價,因此需要引入多種評價方法進行風險因素的安全性評估。近年來模糊層次分析法、熵權法等評價方法已經成功應用于盾構機領域[5]。Jafar[6]最先將模糊層次分析法引入到隧道施工評價中。Ebrahimabadi[7]采用模糊層次分析法選擇了最適合開挖其工程隧道的隧道掘進機類型。Lin等[8]通過模糊層次分析法、博弈論、熵權法等多種方法相結合完成對盾構機中滾刀性能綜合評價。由于換刀機器人屬于即將應用在盾構機中的新技術,目前并無學者對其換刀流程的安全性進行評估。
本研究依托中國鐵建重工集團股份有限公司研制的換刀機器人和換刀作業工藝,建立換刀機器人換刀安全評價體系,采用模糊層次分析法與熵權法分別計算評估體系中指標權重,采用博弈論對權重計算結果進行優化得到最優權重。利用模糊綜合評價,基于R=P×C風險定級模型[9],計算各指標的安全綜合評價分數。針對安全綜合評價分低的指標,提出針對性的改進措施,保證機器人在實際應用中的安全性。
1 基于模糊層次-熵權法-博弈論的安全性評價模型
1.1 模糊層次分析法
模糊層次分析法通過模糊數學的計算方法的得到各安全指標的權重,主要步驟包括:
(1)建立模糊互補判斷矩陣,模糊層次分析法通過將同一層級的指標以上一級指標為準則進行兩兩比較,通過0.1~0.9數量標度法對各指標的重要程度進行量化,從而建立模糊互補判斷矩陣,見表1。

表1 0.1~0.9數量標度法
按照0.1~0.9數量標度法得到的模糊互補判斷矩陣如式(1)所示:

其中:aii=0.5,0<aij<1,aij=1-aij。
(2)建立模糊一致判斷矩陣,采用行和轉換法將模糊互補判斷矩陣轉化為模糊一致判斷矩陣,其具體過程如下:
①對模糊互補判斷矩陣的每一行進行求和運算:

②基于每行求和運算的結果ri,利用式(3),進行模糊一致判斷矩陣轉化:

③利用rij對矩陣完成重構,得到模糊一致判斷矩陣R
(3)權重計算,基于模糊一致判斷矩陣R,利用式(4)計算各指標的權重:

其中a為線性轉換系數:a=(n-1)/2。
1.2 熵權法
熵權法的計算步驟為:
(1)依據所構建的評估指標數據建立原始數據矩陣:

其中下標m代表評價體系中具有m個評價對象,下標n代表有n個評價指標。
(2)數據矩陣的每列進行標準化處理,將指標的絕對值轉化為相對值
正向指標:


負向指標:其中正向指標意味著指標值越大,說明指標越優,負向指標反之。
(3)對標準化后的數據矩陣X′進行歸一化處理
,計算第j個評價指標的信息熵其中k=1/lnm。

(4)計算第j個指標的熵權
1.3 最優組合權重
為綜合模糊層次分析法和熵權法權重計算結果,以避免單一評價方法的片面性,通過博弈論來平衡兩種權重計算結果以獲取最優權重。其計算步驟為:
設采用L種權重計算方法對評價體系中的n個指標進行權重計算,得到相應的權重向量wk=(wk1,wk2,…,wkn),k=1,2,…,L。設各權重的線性組合為wc。其中ck記作權重組合系數。

通過選取合適的權重組合系數,可以使得wc與wk之間的偏差達到最小。

利用矩陣微分性質和最優化的一階導數條件,可得

基于式(12)即可解得相應的權重系數,之后對權重系數進行歸一化處理可得
,得到組合最優權重為:

1.4 模糊綜合評價
其評價方式如下:
(1)根據權重計算結果,建立安全指標集U={u1,u2,…,um},以及建立對應因素的權重集W={w1,w2,…,wm}。
(2)根據項目中的實際情況與專家意見,建立合適的評語集V={v1,v2,…,vn}。
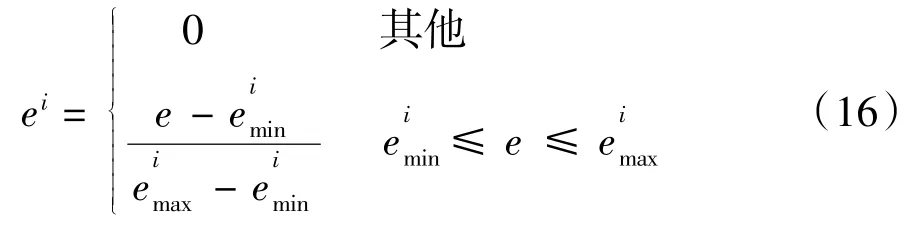
(3)采用三角隸屬度函數計算各指標的隸屬度,設置ei第i個評價等級的隸屬度,e為各評價指標的實際值,為第i個評價等級的上限,為第i個評價等級的下限。為第i個評價指標上限和下限的均值。
當i=1時

當i=2,3,n-1時

當i=n時
(4)確定各指標在評語集合中的隸屬度,建立模糊評價向量
將各指標的模糊評價
向量組合建立模糊評價矩陣E。

(5)將所得模糊評價矩陣E與權重向量W進行模糊運算,得到模糊綜合評價結果為:

2 換刀機器人安全性評價體系
換刀機器人換刀流程分為:作業請求階段、作業準備階段和作業執行階段3個階段。在作業請求階段,磨損檢測系統對掘進過程中刀具磨損情況進行檢測,通過在盾構機內部設置的無線發送及接收模塊,進行數據傳輸接收。在刀具的磨損程度達到換刀要求后,依據刀具磨損檢測系統的位置數據和刀盤旋轉編碼器數據確認待更換滾刀位置。在作業準備階段,旋轉刀盤將待更換滾刀轉到換刀機器人換刀范圍內,刀盤停轉鎖緊。啟動開挖倉壓力調節系統保證開挖倉壓力穩定,并將倉內的土渣泥漿排出,之后啟動存儲倉壓力調節系統,使儲存倉與開挖倉內壓力相等,確認安全后,依照順序開閉閘門,準備執行換刀作業。在作業執行階段,機器人進入開挖倉,機器人運動到待更換滾刀位置,完成刀具安裝/拆卸工作,機器人換刀作業具體過程因刀具刀座特點而異。基于換刀機器人換刀流程,建立換刀機器人安全評估體系,如圖1所示。

圖1 換刀機器人安全評估體系
3 換刀機器人指標權重計算
3.1 模糊層次分析法權重計算
邀請5位相關的行業專家對換刀機器人安全評估體系中的準則層和指標層的指標進行討論,根據其重要程度進行兩兩比較,依據專家評價結果建立準則層判斷矩陣A,和目標層判斷矩陣A1,A2,A3。

利用式(1)-(4)對判斷矩陣進行權重計算,分別得到準則層權重與目標層權重。
3.2 熵權法權重計算
從風險發生概率和事故發生后果嚴重性兩個方面對換刀機器人換刀過程指標的安全性進行量化評估,將指標的風險發生概率劃分為“幾乎不可能發生”“小概率發生”“偶然發生”“很可能發生”“極有可能發生”五個等級,各等級分別對應數值為1-5。將事故發生后果嚴重性劃分為“輕微的”“較輕微的”“嚴重的”“較嚴重的”“災難性的”5個等級,各等級分別對應數值為1-5。邀請6位專家對換刀機器人各指標進行風險發生概率和事故發生后果嚴重性的進行等級劃分,并將最終的等級劃分結果轉化成數值。
依據表2,表3的指標量化評估結果,構建決策矩陣X1,X2,利用式(5)-(9)計算熵權,由于風險發生概率與事故發生后果嚴重程度對指標的安全性有著相同程度的影響,因此對兩者的權重計算結果取均值,得到利用熵權法計算各指標的最終權重結果。

表2 風險發生概率量化評估

表3 事故發生后果嚴重性量化評估
3.3 博弈論最優權重計算
基于權重計算結果依據式(10)-(13)得到機器人準則層和指標層的最優權重見表4。

表4 換刀機器人各指標最優權重
4 換刀機器人模糊綜合評價
參照換刀機器人指標量化評估中的等級劃分,建立風險發生概率評語集V1={V11,V12,V13,V14,V15}={幾乎不可能,小概率發生,偶爾發生,很可能發生,極有可能發生}及事故發生后果嚴重程度評語集V2={V21,V22,V23,V24,V25}={輕微的,較輕微的,嚴重的,較嚴重的,災難性的}。在進行兩者的評價過程中,采用相同隸屬度函數。以事故發生后果嚴重程度為例,所得隸屬度函數如圖2所示。

圖2 隸屬度函數
分別取風險發生概率及事故發生后果嚴重性的量化評估結果均值帶入隸屬度函數,得到兩者的評價矩陣。依據定級模型,根據風險發生概率大小以及事故發生后果嚴重程度,將安全等級劃分為安全性低,安全性中,安全性高,安全性極高四個等級,所得R=P×C定級模型見表5。

表5 R=P×C定級模型
由此建立安全性評價集合V3={V31,V32,V33,V34}={安全性低,安全性中,安全性高,安全性極高}。其中通過表5,可得:

基于指標層風險發生概率及事故發生后果嚴重性的評價矩陣和式(19),可得指標層安全性評價矩陣E1-1,E1-2,E1-3利用式(18)計算得到準則層及目標層的評價矩陣E2,E3:


為更直觀地表現各指標的安全性,設立安全等級分通過各指標的得分情況直接表現其安全程度。
由表6建立安全分數集C=[50,67.5,82.5,95]T,各層次中指標的綜合評價分值由式20計算得到:

表6 風險評價表

利用式(20),最終計算得到各指標的綜合評價分值為:
依據評價結果,換刀機器人整體換刀流程的安全性處于中等偏上水平。準則層中作業請求階段的綜合評價分值為75.81,屬于安全性高的指標。作業準備階段的綜合評價分值為66.88,作業執行階段的綜合評價分值為73.20,這兩個階段的屬于安全性中等的指標。在實際工程應用中,當換刀機器人換刀流程處于這兩個階段時應給予重點關注。針對指標層中具體安全評價指標進行進一步分析,其中開挖倉壓力調節、地質突發風險預警、機器人接口配置以及機器人碰撞檢測這4個指標的綜合評價分值分別為62.64,63.61,67.50,69.17其安全等級屬于中等偏下。為提高換刀機器人換刀安全性,針對這4個指標提出相應改進措施。

表7 各指標的綜合評價分值
對于地質突發風險預警,換刀前要仔細查看地質資料,盡量避免在含水量大、地質穩定性差的地段進行換刀作業,并且機器人需處于全面監控狀態,及時對突發地質情況進行預警。針對機器人接口配置,將機器人與儲存倉的滑軌部分進行進一步的精密加工,以保證機器人運行流暢性和滿足機器人重載要求。在機器人基座中心采用回轉接頭過渡管線,避免機器人在運動過程中發生管線纏繞現象以及在長時間高頻率摩擦中出現的管線破損現象。針對開挖倉壓力調節系統,基于壓力平衡試驗臺,采用安全閥,高精度壓力表,自力式減壓表,截止閥等設備對現有壓力平衡系統進行優化設計,最終達到開挖倉內的壓力波動范圍在bar。在換刀機器人碰撞檢測方面,利用虛擬顯示技術,將機器人位姿實時的顯示在上位機中,實現在能見度低的盾構機內部的換刀可視化,結合機器人中搭載的傳感器達到實時檢測機器人位姿的目的,從而避免機器人與盾構機的內部結構發生碰撞。
5 結語
基于模糊層次分析法-熵權法-博弈論對換刀機器人換刀過程中安全性評估問題進行了探討,得到了如下結論:
(1)從換刀機器人換刀流程分析,提出換刀機器人在不同換刀階段的換刀安全性指標,按照層屬關系建立換刀機器人換刀安全性評價體系,全面反應換刀機器人在各階段可能會發生的安全性問題。
(2)基于模糊層次分析法、熵權法、博弈論方法建立換刀機器人安全性評估模型。通過建立的換刀機器人換刀安全性評價體系,利用模糊層次分析法和熵權法分別計算層次結構中各指標的權重。通過博弈論方法綜合兩者的權重計算結果,避免單一評價方法的片面性進而得到評價體系中各指標的最優權重。
(3)通過模糊綜合評價以及風險定級模型對換刀機器人換刀流程安全性進行評估,得到各指標的安全值,依據評價結果,換刀機器人換刀過程的安全性位于中等等級。針對安全性低的指標:開挖倉壓力調節、地質突發風險預警、機器人接口配置和機器人碰撞檢測,提出相應優化措施,進一步提高換刀安全性。
猜你喜歡
現代儀器與醫療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
石油瀝青(2021年4期)2021-10-14 08:50:44
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
電子設計工程(2015年12期)2015-02-27 12:06:24
兒童故事畫報(2013年3期)2013-06-24 05:40:30
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51