基于虛擬樣機(jī)的汽車冗余轉(zhuǎn)向系統(tǒng)聯(lián)合仿真
2022-12-08 12:10:16楊文志
汽車工程 2022年11期
張 博,楊文志,蘆 勇
(1.清華大學(xué)車輛與運(yùn)載學(xué)院,北京 100084;2.東華大學(xué)機(jī)械工程學(xué)院,上海 201620;3.上汽創(chuàng)新研發(fā)總院,上海 201799)
前言
近年來(lái)由轉(zhuǎn)向系統(tǒng)控制單元故障帶來(lái)的車輛事故問(wèn)題日益突出,而隨著智能駕駛技術(shù)的發(fā)展,人們對(duì)轉(zhuǎn)向系統(tǒng)安全性的需求卻不斷提高,冗余轉(zhuǎn)向系統(tǒng)以其高效、可靠性高等優(yōu)勢(shì)成為新的研究熱點(diǎn)。冗余轉(zhuǎn)向系統(tǒng)對(duì)傳感器、控制單元(electronic control unit,ECU)等電子元器件進(jìn)行冗余,避免轉(zhuǎn)向時(shí)某個(gè)部件發(fā)生故障而導(dǎo)致轉(zhuǎn)向失效的現(xiàn)象發(fā)生[1],確保轉(zhuǎn)向系統(tǒng)的足夠安全。
我國(guó)對(duì)冗余轉(zhuǎn)向系統(tǒng)的開(kāi)發(fā)還處于起步階段。由于其機(jī)械部分和控制部分都較為復(fù)雜,利用計(jì)算機(jī)建立虛擬系統(tǒng)樣機(jī),進(jìn)行各方案的分析優(yōu)化和控制策略的設(shè)計(jì),可以大大縮短研發(fā)周期,減少不必要的人力物力消耗[2]。現(xiàn)有對(duì)轉(zhuǎn)向系統(tǒng)的仿真研究主要集中在單一的機(jī)械模型仿真或基于Simulink的控制仿真[3-6],兩者之間交互不足,不能完整模擬轉(zhuǎn)向過(guò)程。路懷華等[4]通過(guò)有限元分析軟件對(duì)轉(zhuǎn)向系統(tǒng)機(jī)械總成進(jìn)行模態(tài)分析,并基于響應(yīng)面法對(duì)靈敏度較大的零件進(jìn)行分析優(yōu)化,不僅降低了試驗(yàn)時(shí)人為造成的測(cè)量誤差,也縮短了優(yōu)化設(shè)計(jì)時(shí)間。劉芳等[5]基于ADAMS建立了精細(xì)化的轉(zhuǎn)向系統(tǒng)機(jī)械模型,完成了對(duì)轉(zhuǎn)向系統(tǒng)的助力特性分析,并通過(guò)試驗(yàn)驗(yàn)證了該仿真模型的準(zhǔn)確性,但該模型是在理想的助力控制下完成的,沒(méi)有考慮到控制系統(tǒng)對(duì)助力電機(jī)的控制效果。劉亞輝和季學(xué)武[6]在AMESim仿真軟件中建立了15自由度的車輛模型,利用該模型測(cè)量出不同車速下、不同轉(zhuǎn)向盤(pán)轉(zhuǎn)角時(shí)的轉(zhuǎn)向阻力,進(jìn)而得到了可變化的轉(zhuǎn)向助力曲線。Huang等[7]提出了一種滑模控制算法,基于Simulink建立了轉(zhuǎn)向系統(tǒng)的控制模型并進(jìn)行仿真,改善了雙電機(jī)轉(zhuǎn)速不同步的問(wèn)題,轉(zhuǎn)向系統(tǒng)的控制性能得到驗(yàn)證和優(yōu)化。商顯赫等[8]基于Simulink建立了包含機(jī)械模型、2自由度車輛模型和控制器模型的轉(zhuǎn)向系統(tǒng)模型,驗(yàn)證了所設(shè)計(jì)控制策略具有超調(diào)量小、穩(wěn)定性高的控制效果,但通過(guò)Simulink建立的轉(zhuǎn)向系統(tǒng)機(jī)械模型參數(shù)復(fù)雜、計(jì)算過(guò)于繁瑣,不能模擬實(shí)際轉(zhuǎn)向時(shí)零件的運(yùn)動(dòng)狀態(tài)。上述工作的研究對(duì)象多為電動(dòng)助力轉(zhuǎn)向系統(tǒng),目前對(duì)冗余轉(zhuǎn)向系統(tǒng)的仿真研究較少。
本文中將綜合考慮轉(zhuǎn)向系統(tǒng)的機(jī)械部分和控制部分,建立聯(lián)合冗余轉(zhuǎn)向系統(tǒng)動(dòng)力學(xué)模型和控制模型的仿真模型,基于該模型進(jìn)行仿真分析。首先依據(jù)齒輪齒條動(dòng)力學(xué)理論推導(dǎo)齒輪齒條的動(dòng)力學(xué)方程;然后基于Simulink建立冗余轉(zhuǎn)向系統(tǒng)的控制模型;其次,利用ADAMS軟件創(chuàng)建轉(zhuǎn)向系統(tǒng)齒輪齒條的模型并進(jìn)行運(yùn)動(dòng)學(xué)仿真,聯(lián)立兩個(gè)模型構(gòu)成完整的冗余轉(zhuǎn)向系統(tǒng),對(duì)轉(zhuǎn)向器的轉(zhuǎn)向性能進(jìn)行仿真分析。最后,通過(guò)轉(zhuǎn)向器臺(tái)架試驗(yàn)驗(yàn)證,所設(shè)計(jì)的冗余轉(zhuǎn)向系統(tǒng)能夠滿足車輛的助力需求,且在部分控制回路出現(xiàn)故障時(shí)仍可以提供一半的助力協(xié)助駕駛員進(jìn)行緊急轉(zhuǎn)向,聯(lián)合仿真方法的分析結(jié)果具有較高的準(zhǔn)確性,有利于今后對(duì)冗余轉(zhuǎn)向系統(tǒng)的設(shè)計(jì)開(kāi)發(fā)。
1 冗余轉(zhuǎn)向系統(tǒng)工作原理
如圖1所示,冗余轉(zhuǎn)向系統(tǒng)由齒輪齒條傳動(dòng)機(jī)構(gòu)、蝸輪蝸桿減速機(jī)構(gòu)、六相電機(jī)、ECU和轉(zhuǎn)矩傳感器構(gòu)成。
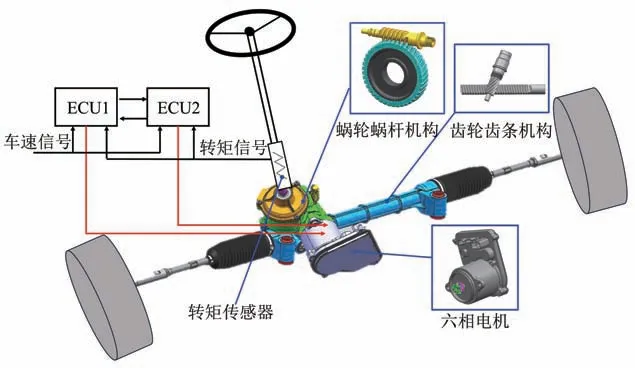
圖1 冗余轉(zhuǎn)向系統(tǒng)總體結(jié)構(gòu)
車輛行駛過(guò)程中,駕駛員操縱轉(zhuǎn)向盤(pán)轉(zhuǎn)向時(shí),兩個(gè)ECU同時(shí)接受轉(zhuǎn)矩傳感器的轉(zhuǎn)矩信號(hào)和車速傳感器的車速信號(hào)后,分別產(chǎn)生目標(biāo)電流,共同控制六相電機(jī)輸出相應(yīng)助力矩,電機(jī)輸出的助力矩經(jīng)過(guò)減速機(jī)構(gòu)的增力矩作用后和轉(zhuǎn)向盤(pán)力矩共同驅(qū)動(dòng)轉(zhuǎn)向齒輪,帶動(dòng)齒條橫向運(yùn)動(dòng)實(shí)現(xiàn)轉(zhuǎn)向。相對(duì)于傳統(tǒng)的電動(dòng)助力轉(zhuǎn)向系統(tǒng),冗余轉(zhuǎn)向系統(tǒng)在單獨(dú)控制回路中元器件出現(xiàn)故障時(shí),另一條回路保持原來(lái)電流,控制助力電機(jī)輸出相應(yīng)助力矩,從而實(shí)現(xiàn)轉(zhuǎn)向系統(tǒng)的安全可靠。
冗余轉(zhuǎn)向系統(tǒng)控制部分的核心是ECU針對(duì)不同的車速信號(hào)和轉(zhuǎn)向盤(pán)轉(zhuǎn)矩信號(hào)根據(jù)所設(shè)計(jì)的助力特性曲線確定目標(biāo)電流,并利用PID控制器調(diào)節(jié)目標(biāo)電流控制助力電機(jī)。冗余轉(zhuǎn)向系統(tǒng)的機(jī)械部分也會(huì)對(duì)轉(zhuǎn)向造成不同的影響,如齒輪齒條傳動(dòng)機(jī)構(gòu)參數(shù)的選擇、摩擦因數(shù)等都會(huì)影響轉(zhuǎn)向結(jié)果。因此,無(wú)論是對(duì)冗余轉(zhuǎn)向系統(tǒng)控制部分的仿真還是對(duì)機(jī)械部分的仿真都不能完整模擬整個(gè)系統(tǒng)的轉(zhuǎn)向過(guò)程。故本文選擇ADAMS∕Simulink聯(lián)合仿真的方法對(duì)冗余轉(zhuǎn)向系統(tǒng)的助力性能進(jìn)行分析。
2 轉(zhuǎn)向系統(tǒng)運(yùn)動(dòng)學(xué)仿真
2.1 齒輪齒條動(dòng)力學(xué)方程的建立
如圖2所示,對(duì)齒輪齒條傳動(dòng)系統(tǒng)建立動(dòng)力學(xué)模型[9]。其中齒輪為主動(dòng)件;J為齒輪的轉(zhuǎn)動(dòng)慣量;r為齒輪基圓半徑;e為輪齒齒廓誤差;齒條質(zhì)量為m;T、T1分別為作用在齒輪的力矩、地面對(duì)齒條的阻力;齒輪齒條嚙合時(shí),嚙合剛度為kv;嚙合阻尼系數(shù)為cv;齒輪轉(zhuǎn)動(dòng)θ角度時(shí),齒條移動(dòng)距離為s。
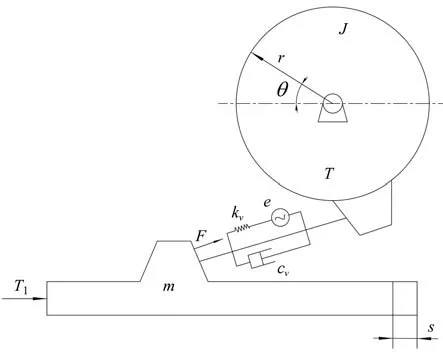
圖2 齒輪齒條嚙合動(dòng)力學(xué)模型[9]
齒輪齒條接觸時(shí)法向力[9]為

齒輪齒條傳動(dòng)系統(tǒng)的力矩平衡方程[9]為

整理可得齒輪齒條嚙合的動(dòng)力學(xué)方程[9]為
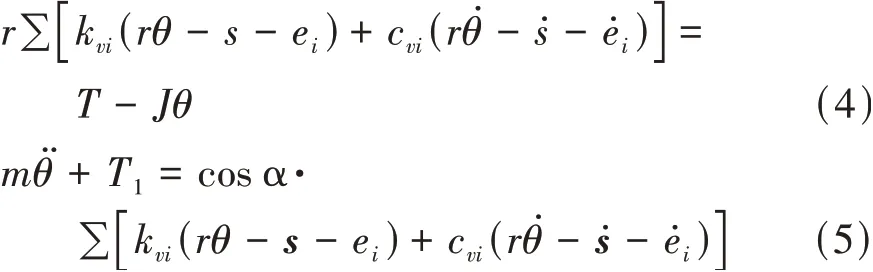
式中:ei為第i對(duì)嚙合齒的齒廓誤差;kvi為第i對(duì)嚙合齒的嚙合剛度;cvi為第i對(duì)嚙合齒的嚙合阻尼系數(shù)。
2.2 齒輪齒條運(yùn)動(dòng)學(xué)仿真
本文所設(shè)計(jì)冗余轉(zhuǎn)向系統(tǒng)中齒輪齒條參數(shù)如表1所示,齒條選用的材料為37CrS4KL,采用調(diào)質(zhì)處理;齒輪軸選用的材料為20CrMnTiH,采用滲氮后淬火處理,現(xiàn)已完成轉(zhuǎn)向機(jī)整體的道路試驗(yàn)和耐久臺(tái)架試驗(yàn),均符合設(shè)計(jì)標(biāo)準(zhǔn)。按實(shí)際裝配情況在SolidWorks中對(duì)轉(zhuǎn)向器齒輪齒條進(jìn)行建模裝配后導(dǎo)入ADAMS,并對(duì)齒輪、齒條賦予材料、質(zhì)量等屬性,并添加約束:對(duì)齒輪軸和地面之間創(chuàng)建旋轉(zhuǎn)副,對(duì)齒條和地面之間創(chuàng)建移動(dòng)副。在齒輪齒條之間施加接觸,以實(shí)現(xiàn)齒輪齒條之間的相對(duì)運(yùn)動(dòng)。
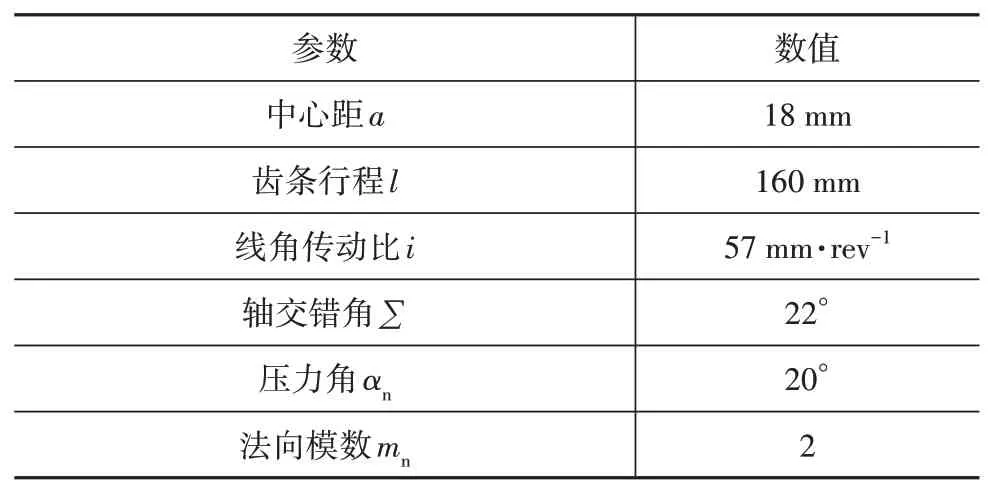
表1 齒輪齒條基本參數(shù)表
為驗(yàn)證轉(zhuǎn)向系統(tǒng)運(yùn)動(dòng)的有效性和可靠性,定義齒輪軸的驅(qū)動(dòng)力矩函數(shù)為:Function(time)=2sin(πt),如圖3所示。以仿真時(shí)間為2 s、仿真步數(shù)為2 000步對(duì)轉(zhuǎn)向系統(tǒng)的平順性進(jìn)行仿真。圖4和圖5為齒條的位移和速度曲線。
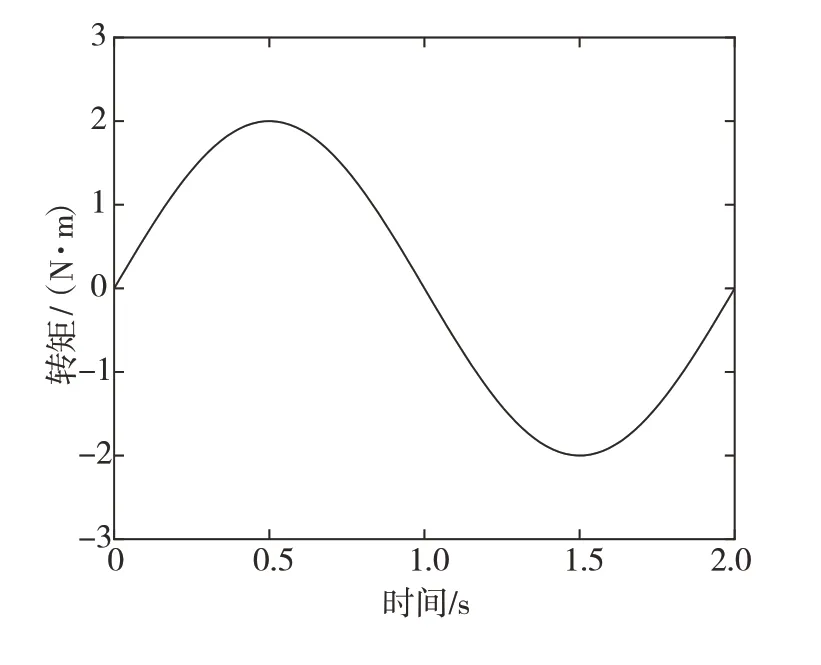
圖3 齒輪軸驅(qū)動(dòng)函數(shù)曲線
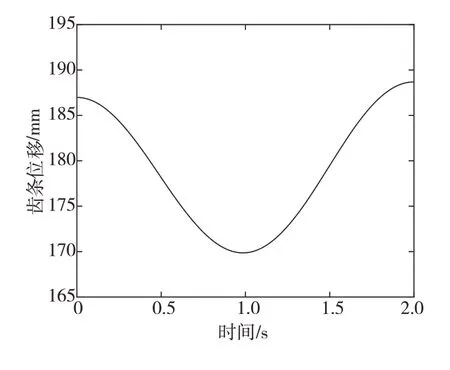
圖4 齒條位移曲線
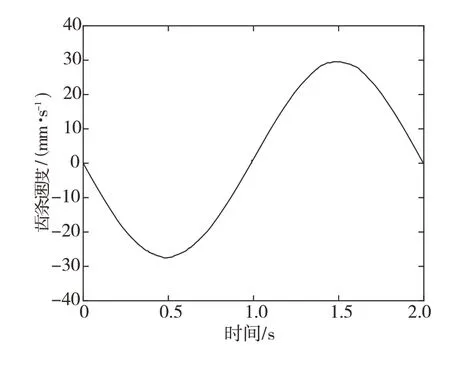
圖5 齒條速度曲線
由圖4和圖5可知,齒條位移、速度分別呈近似余弦、正弦曲線變化趨勢(shì),與齒輪軸的驅(qū)動(dòng)函數(shù)相一致。時(shí)間t=0.5、1.5 s時(shí),轉(zhuǎn)向盤(pán)力矩達(dá)到最大值,此時(shí)齒條速度也達(dá)到最大值;時(shí)間t=1 s時(shí),轉(zhuǎn)向盤(pán)反轉(zhuǎn),齒條位移達(dá)到最大;時(shí)間t=2 s時(shí),齒條速度為0,回到起始位置。仿真表明轉(zhuǎn)向系統(tǒng)模型平順性良好,可以作為聯(lián)合仿真系統(tǒng)里的機(jī)械子系統(tǒng)。
3 冗余轉(zhuǎn)向控制系統(tǒng)設(shè)計(jì)
3.1 直線型助力特性曲線的確定
轉(zhuǎn)向系統(tǒng)的助力特性決定了該轉(zhuǎn)向系統(tǒng)在不同工況下輸出助力的大小。為滿足駕駛員轉(zhuǎn)向需求,設(shè)計(jì)的助力曲線應(yīng)滿足低速下多助力、高速下少助力的原則[10]。本文對(duì)直線型助力特性曲線進(jìn)行設(shè)計(jì),需要確定以下參數(shù)。
(1)助力電機(jī)開(kāi)始運(yùn)行時(shí)的轉(zhuǎn)向盤(pán)轉(zhuǎn)矩Td0,助力電機(jī)輸出力矩飽和時(shí)的轉(zhuǎn)向盤(pán)力矩Tdmax
考慮到助力特性曲線要用到電動(dòng)汽車上,為避免轉(zhuǎn)向過(guò)度靈敏,在轉(zhuǎn)向力矩較小時(shí)不提供助力,取Td0=1 N·m。助力電機(jī)最大輸出轉(zhuǎn)矩時(shí),轉(zhuǎn)向盤(pán)最大轉(zhuǎn)矩為

取轉(zhuǎn)向盤(pán)的最大操縱力Fmax=16 N,轉(zhuǎn)向盤(pán)直徑D=50 cm,最終確定轉(zhuǎn)向盤(pán)最大轉(zhuǎn)矩Tdmax=4 N·m。
(2)最大助力電流Imax
在原地轉(zhuǎn)向(0車速)時(shí)轉(zhuǎn)向阻力矩最大,計(jì)算出原地轉(zhuǎn)向時(shí)齒條所受阻力矩,從而確定最大助力矩Tamax,最終可以得到最大助力電流Imax。


式中:Fn、Fa、Ft1、α、β1、β2、T'、d1分別是齒輪齒面正壓力、齒條所受最大阻力、齒輪圓周力、齒形角、齒輪螺旋角、齒條傾角、齒輪軸所受最大阻力矩、齒輪分度圓直徑。其中齒條所受最大阻力Fa=10.4 kN、齒形角α=20°、齒輪螺旋角β1=29.2°、齒條傾角β2=7.2°、電機(jī)轉(zhuǎn)矩系數(shù)kt=0.867 N·m∕A、減速機(jī)構(gòu)傳動(dòng)比gm=21。根據(jù)以上公式最大助力電流Imax=50 A。
(3)特征車速感應(yīng)系數(shù)K
為保持曲線精度、提高計(jì)算速度、減少試驗(yàn)成本和時(shí)間并提高效率。現(xiàn)取0、50、100和150 km∕h為特征車速,在裝配KISLER力矩轉(zhuǎn)向盤(pán)和IMC數(shù)采系統(tǒng)的榮威marvel x樣車上采集各特征車速下的最大轉(zhuǎn)向阻力,通過(guò)計(jì)算可得各工況下助力電機(jī)應(yīng)提供的助力矩,進(jìn)一步即得出樣本車速下的車速感應(yīng)系數(shù),各特征車速下車速感應(yīng)系數(shù)如表2所示。

表2 特征車速下車速感應(yīng)系數(shù)
(4)車速感應(yīng)系數(shù)擬合
對(duì)表2中數(shù)據(jù)進(jìn)行多項(xiàng)式擬合,可以得到全車下的車速感應(yīng)系數(shù),如圖6所示。隨著車速增加,車速感應(yīng)系數(shù)越來(lái)越小,既保證了在低速下助力電機(jī)能夠提供合適助力,便于駕駛員輕松駕駛,又滿足高車速下提供較小助力,防止駕駛過(guò)程中過(guò)快轉(zhuǎn)向失去“路感”[11]。
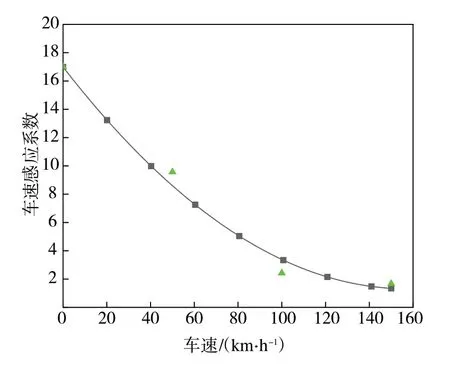
圖6 車速感應(yīng)系數(shù)擬合曲線
車速感應(yīng)系數(shù)擬合曲線表達(dá)式為

于是可得到全車速下的助力特性曲線,如圖7所示。
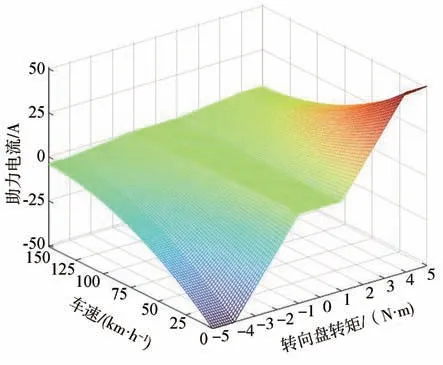
圖7 直線型助力特性曲線
3.2 冗余轉(zhuǎn)向控制策略設(shè)計(jì)
本文針對(duì)冗余轉(zhuǎn)向系統(tǒng)的基本助力控制模式進(jìn)行設(shè)計(jì),兩個(gè)ECU同時(shí)開(kāi)始工作對(duì)轉(zhuǎn)矩信號(hào)以及車速信號(hào)進(jìn)行處理,并由圖7中助力特性曲線計(jì)算得出該轉(zhuǎn)向工況下的目標(biāo)電流,將該電流分配得到主副電流,主副電流在控制器的作用后組成合電流,通過(guò)自主設(shè)計(jì)的仲裁模塊進(jìn)行判斷,控制六相電機(jī)輸出相應(yīng)的助力矩,在經(jīng)過(guò)蝸輪蝸桿機(jī)構(gòu)的減速增力矩作用后,傳遞到齒輪軸上和轉(zhuǎn)向盤(pán)轉(zhuǎn)矩共同驅(qū)動(dòng)齒條進(jìn)行橫向移動(dòng),從而實(shí)現(xiàn)車輛的轉(zhuǎn)向。
而實(shí)際電流和目標(biāo)電流會(huì)存在偏差,需要對(duì)電流修正使其盡可能接近目標(biāo)電流,以便控制六相電機(jī)輸出精確的助力矩。目前,PID控制器以其原理簡(jiǎn)單、容易實(shí)現(xiàn)等優(yōu)點(diǎn)被廣泛應(yīng)用于轉(zhuǎn)向系統(tǒng)中,利用PID控制器可以有效減低實(shí)際電流與目標(biāo)電流之間的誤差,理想條件下PID控制規(guī)律為

式 中:KP為 比 例 系 數(shù);KI為 積 分 系 數(shù);KD為 微 分系數(shù)。
冗余轉(zhuǎn)向系統(tǒng)的電流分配方案如圖8所示。正常工作下,每條回路承擔(dān)總目標(biāo)控制電流的一半,回路中有問(wèn)題會(huì)反饋到仲裁模塊,由仲裁模塊進(jìn)行故障識(shí)別、處理、仲裁和補(bǔ)償機(jī)制的建立、完善和優(yōu)化,通過(guò)合適的閾值和狀態(tài)切換策略,保證轉(zhuǎn)矩助力平衡分配、平穩(wěn)過(guò)渡,極端情況一個(gè)回路失效,另外一個(gè)控制回路可以至少保持50%的助力電流。

圖8 冗余轉(zhuǎn)向系統(tǒng)電流分配方案
在Simulink創(chuàng)建冗余轉(zhuǎn)向系統(tǒng)的控制模型,如圖9所示。其中輸入模塊為車速信號(hào)、轉(zhuǎn)向盤(pán)轉(zhuǎn)矩信號(hào),經(jīng)過(guò)助力特性函數(shù)曲線模塊處理后生成目標(biāo)電流,目標(biāo)電流被平均分配主副電流,在PID控制器對(duì)電流進(jìn)行調(diào)整后,生成合電流控制六相電機(jī)輸出助力矩。
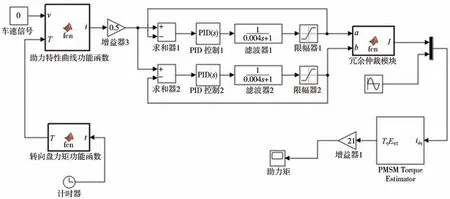
圖9 冗余轉(zhuǎn)向系統(tǒng)控制模型
4 冗余轉(zhuǎn)向系統(tǒng)的聯(lián)合仿真
4.1 聯(lián)合仿真模型的建立
利用ADAMS中Control模塊可以對(duì)機(jī)械子模型和控制子模型的輸入接口、輸出接口連接,從而實(shí)現(xiàn)機(jī)械模型和控制模型數(shù)據(jù)的交互[12]。在ADAMS動(dòng)力學(xué)模型中,定義轉(zhuǎn)向軸轉(zhuǎn)速、轉(zhuǎn)向助力矩為輸入變量,齒輪軸力矩、齒條輸出力為輸出變量。利用Matlab軟件的接口將動(dòng)力學(xué)模型和控制模型聯(lián)合起來(lái),進(jìn)行仿真分析。調(diào)整聯(lián)合仿真的控制參數(shù),其中動(dòng)力學(xué)仿真采用離散型,聯(lián)合仿真的時(shí)間間隔設(shè)為0.005 s,選擇ode4作為迭代求解器。
4.2 聯(lián)合仿真分析
4.2.1 輸入輸出特性仿真
依據(jù)汽車動(dòng)力轉(zhuǎn)向器總成臺(tái)架試驗(yàn)方法進(jìn)行輸入輸出特性仿真,在轉(zhuǎn)向系統(tǒng)聯(lián)合仿真模型中輸入幅值為5 N·m、頻率為1 rad∕s、初相為π∕2的正弦信號(hào)模擬轉(zhuǎn)向盤(pán)操縱力,記錄50、100 km∕h車速下轉(zhuǎn)向系統(tǒng)單回路工作和正常工作狀態(tài)下齒條輸出力曲線。冗余轉(zhuǎn)向系統(tǒng)齒條輸出力曲線如圖10所示。
由圖10可知,轉(zhuǎn)向盤(pán)轉(zhuǎn)矩小于1 N·m時(shí),助力電機(jī)不產(chǎn)生助力,齒條輸出力全由轉(zhuǎn)向盤(pán)力矩提供。轉(zhuǎn)向盤(pán)轉(zhuǎn)矩大于1 N·m時(shí),助力電機(jī)開(kāi)始工作,齒條輸出力近似線性增加。轉(zhuǎn)向盤(pán)轉(zhuǎn)矩達(dá)到4 N·m時(shí),助力矩保持恒定,曲線上升趨勢(shì)變緩;轉(zhuǎn)向盤(pán)轉(zhuǎn)矩一定時(shí),50 km∕h車速時(shí)齒條輸出力較100 km∕h車速下的齒條輸出力更大,體現(xiàn)了該轉(zhuǎn)向系統(tǒng)具有較好的路感;雙控制回路都正常工作時(shí),助力電機(jī)兩側(cè)都正常工作。在一條控制回路出現(xiàn)故障時(shí),關(guān)閉助力電機(jī)一側(cè)助力,另一側(cè)電機(jī)仍提供一半的正常助力保障駕駛時(shí)正常轉(zhuǎn)向,由此說(shuō)明該冗余轉(zhuǎn)向系統(tǒng)具有較好的容錯(cuò)性。
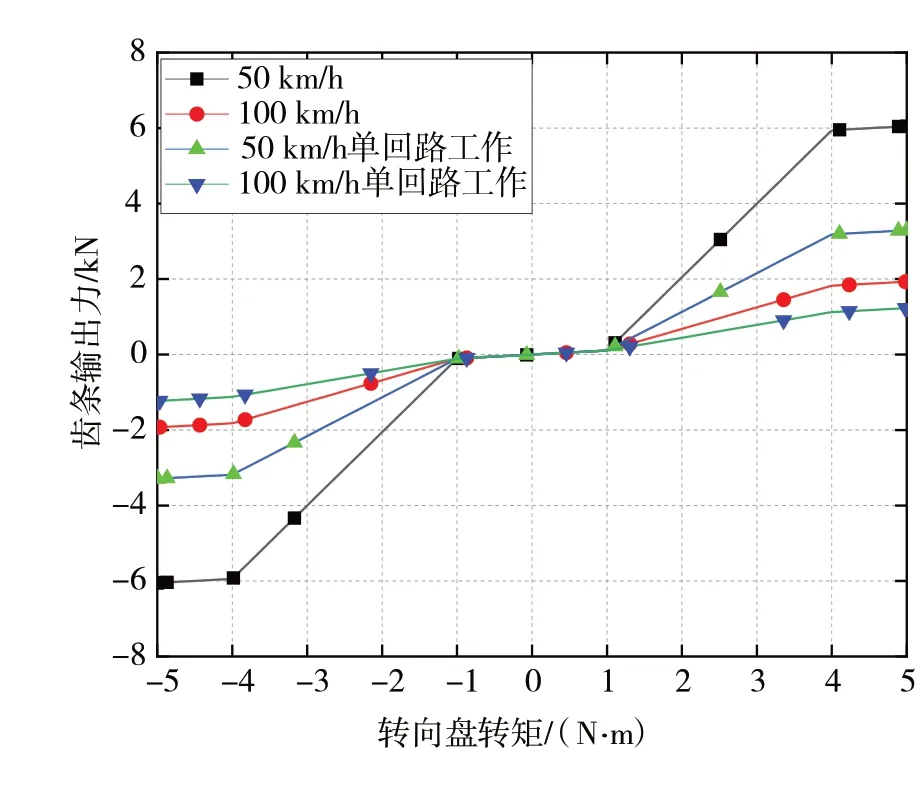
圖10 輸入輸出特性曲線
4.2.2 助力功能特性仿真
為驗(yàn)證冗余轉(zhuǎn)向系統(tǒng)滿足助力需求,現(xiàn)對(duì)原地轉(zhuǎn)向情況進(jìn)行仿真。定義齒輪軸轉(zhuǎn)速函數(shù)Function(time)=IF(time-24:IF(time-8:60d,60d,-60d),
-60d,60d),定義齒條負(fù)載為10 kN,轉(zhuǎn)向盤(pán)轉(zhuǎn)矩和轉(zhuǎn)角之間的關(guān)系如圖11所示。
由圖11可知,轉(zhuǎn)向盤(pán)從中間位置轉(zhuǎn)至-480°再到480°最后回正的過(guò)程中,轉(zhuǎn)向盤(pán)左轉(zhuǎn)時(shí)平均轉(zhuǎn)矩為2.462 5 N·m,右轉(zhuǎn)時(shí)平均轉(zhuǎn)矩為2.412 8 N·m,可見(jiàn)左右轉(zhuǎn)向時(shí)電機(jī)助力基本一致,避免了轉(zhuǎn)向時(shí)輕重不一的情況;轉(zhuǎn)向盤(pán)轉(zhuǎn)矩最大值為2.728 N·m,且轉(zhuǎn)矩上下波動(dòng)小于0.5 N·m,轉(zhuǎn)向系統(tǒng)助力平穩(wěn),不存在轉(zhuǎn)向卡滯現(xiàn)象,符合轉(zhuǎn)向器設(shè)計(jì)標(biāo)準(zhǔn)。
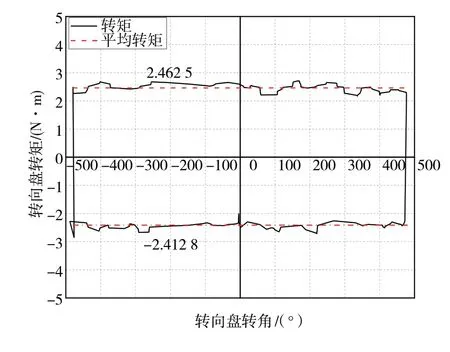
圖11 原地轉(zhuǎn)向力矩曲線
5 試驗(yàn)驗(yàn)證
為驗(yàn)證聯(lián)合仿真的分析精度,開(kāi)展轉(zhuǎn)向系統(tǒng)臺(tái)架試驗(yàn)進(jìn)行對(duì)標(biāo)。轉(zhuǎn)向器試驗(yàn)臺(tái)如圖12所示,試驗(yàn)臺(tái)輸入端采取伺服系統(tǒng)加載的方式,利用伺服電機(jī)輸出轉(zhuǎn)矩來(lái)模擬駕駛員手力操縱轉(zhuǎn)向盤(pán)[13]。齒條輸出端采取伺服電機(jī)來(lái)模擬施加地面阻力,通過(guò)調(diào)節(jié)伺服電機(jī)電流施加不同阻力。利用計(jì)算機(jī)對(duì)各傳感器中數(shù)據(jù)進(jìn)行分析處理[14]。
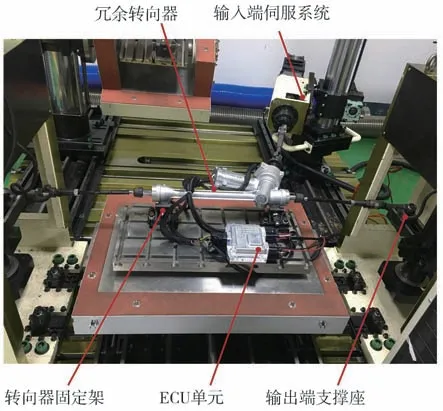
圖12 轉(zhuǎn)向系統(tǒng)試驗(yàn)臺(tái)
為了與聯(lián)合仿真對(duì)比,利用伺服電機(jī)對(duì)齒條施加10 kN的阻力,輸入端伺服系統(tǒng)對(duì)齒輪軸施加10 r∕min的轉(zhuǎn)速使其由中間位置轉(zhuǎn)動(dòng)至左極限,然后再轉(zhuǎn)動(dòng)至右極限,最后回到中位作為一個(gè)試驗(yàn)循環(huán)。轉(zhuǎn)向盤(pán)轉(zhuǎn)矩曲線如圖13所示。
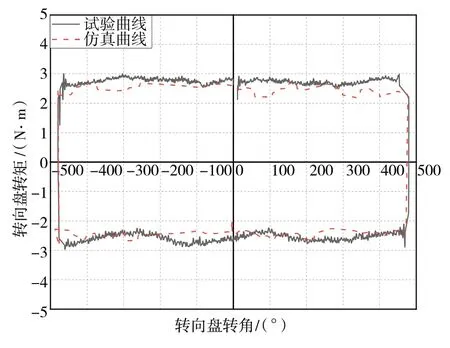
圖13 原地轉(zhuǎn)向力矩試驗(yàn)曲線
由圖13可知,駕駛員在操縱裝配冗余轉(zhuǎn)向系統(tǒng)的車輛轉(zhuǎn)向時(shí),轉(zhuǎn)矩波動(dòng)僅有0.5 N·m,手感更加舒適。基于原地轉(zhuǎn)向臺(tái)架試驗(yàn)左右轉(zhuǎn)向兩種情況重復(fù)試驗(yàn),得到仿真和試驗(yàn)對(duì)標(biāo)情況如表3所示。

表3 轉(zhuǎn)向系統(tǒng)原地轉(zhuǎn)向力矩仿真試驗(yàn)對(duì)標(biāo)
由表3可知,不論左右轉(zhuǎn)向,聯(lián)合仿真所得結(jié)果和試驗(yàn)測(cè)試結(jié)果誤差均小于5%,聯(lián)合仿真分析可靠,對(duì)轉(zhuǎn)向系統(tǒng)前期研發(fā)設(shè)計(jì)具有指導(dǎo)意義。通過(guò)對(duì)轉(zhuǎn)向系統(tǒng)臺(tái)架試驗(yàn)的實(shí)際情況和聯(lián)合仿真簡(jiǎn)化模型進(jìn)行分析,存在的誤差有以下幾種原因:(1)聯(lián)合仿真模型中利用轉(zhuǎn)矩預(yù)測(cè)模塊來(lái)模擬六相電機(jī)的輸出轉(zhuǎn)矩,實(shí)際上六相電機(jī)工作時(shí)也會(huì)存在轉(zhuǎn)矩波動(dòng),從而造成轉(zhuǎn)向盤(pán)轉(zhuǎn)矩波動(dòng)的現(xiàn)象;(2)仿真時(shí)沒(méi)有考慮到蝸輪蝸桿傳動(dòng)時(shí)的轉(zhuǎn)矩波動(dòng),而蝸輪蝸桿傳動(dòng)的平穩(wěn)性會(huì)影響到轉(zhuǎn)向軸的轉(zhuǎn)矩變化;(3)動(dòng)力學(xué)模型只考慮了齒輪齒條之間的摩擦,而試驗(yàn)時(shí)轉(zhuǎn)向系統(tǒng)內(nèi)部零件較多,裝配時(shí)也會(huì)存在裝配誤差,實(shí)際阻力較大,所以試驗(yàn)數(shù)據(jù)偏大于仿真結(jié)果。
6 結(jié)論
(1)本文針對(duì)冗余轉(zhuǎn)向系統(tǒng)開(kāi)發(fā)周期長(zhǎng)、試驗(yàn)成本高的問(wèn)題,建立了ADAMS-Simulink的聯(lián)合仿真模型。在ADAMS中建立齒輪齒條的動(dòng)力學(xué)模型,并基于Simulink創(chuàng)建冗余控制系統(tǒng)模型,最后利用MATLAB軟件的交互功能聯(lián)合兩個(gè)模型,進(jìn)行冗余轉(zhuǎn)向系統(tǒng)的助力性能仿真。
(2)冗余轉(zhuǎn)向系統(tǒng)在助力過(guò)程中轉(zhuǎn)矩平穩(wěn),具有良好的助力特性,且在單回路工作時(shí),助力電機(jī)能夠輸出50%助力矩協(xié)助駕駛員靠邊停車,轉(zhuǎn)向可靠性大大增加,行車更加安全;聯(lián)合仿真所得結(jié)果和試驗(yàn)測(cè)試結(jié)果誤差不超過(guò)5%,該聯(lián)合仿真的方法是正確的、有效的,可以實(shí)現(xiàn)對(duì)轉(zhuǎn)向系統(tǒng)的性能仿真。
(3)建立的動(dòng)力學(xué)模型僅考慮了轉(zhuǎn)向傳動(dòng)機(jī)構(gòu),實(shí)際上轉(zhuǎn)向系統(tǒng)中其它零件對(duì)轉(zhuǎn)向系統(tǒng)的性能也有影響。因此,后續(xù)應(yīng)進(jìn)一步完善模型,從而獲得更精確的仿真結(jié)果。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語(yǔ)世界(2022年9期)2022-10-18 01:11:18
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
