一種遙感影像混合噪聲二階去除方法
2022-12-05 12:09:40張勝?lài)?guó)任超王子彥閆志恒劉桃林郭玥張旭東
科學(xué)技術(shù)與工程 2022年30期
張勝?lài)?guó), 任超,2*, 王子彥, 閆志恒, 劉桃林, 郭玥, 張旭東
(1.桂林理工大學(xué)測(cè)繪地理信息學(xué)院, 桂林 541006; 2.廣西空間信息與測(cè)繪重點(diǎn)實(shí)驗(yàn)室, 桂林 541006)
遙感影像中包含了豐富的地物紋理信息,對(duì)遙感影像的解譯分析已被廣泛應(yīng)用于土地利用、城市規(guī)劃及環(huán)境監(jiān)測(cè)等各個(gè)領(lǐng)域[1]。但由于傳感器本身存在的缺陷及周?chē)h(huán)境因素的影響,遙感影像在獲取和傳輸過(guò)程中會(huì)受到噪聲干擾而導(dǎo)致影像質(zhì)量下降,影響影像后續(xù)的使用與研究[2-3],因此,如何提高影像質(zhì)量,有效去除影像中的噪聲并且盡可能多的保留原始影像的邊緣細(xì)節(jié)及紋理特征一直是遙感影像預(yù)處理領(lǐng)域的重點(diǎn)。
目前對(duì)遙感影像的處理主要考慮高斯噪聲及椒鹽噪聲[4-5]。近年來(lái),為了降低噪聲對(duì)影像的干擾,提升影像質(zhì)量,許多去噪方法、模型相繼被提出。Chang等[6]將全變分模型和稀疏表示結(jié)合進(jìn)行遙感影像去噪。徐冬等[7]提出結(jié)合主成分分析法與復(fù)小波變換的遙感影像去噪方法,該方法首先利用噪聲調(diào)整的主成分分析法提取特征,再利用復(fù)小波變換對(duì)低能量成分進(jìn)行去噪處理。夏琴等[8]將K-奇異值分解(K-singular value decomposition,K-SVD)稀疏表示理論應(yīng)用于衛(wèi)星遙感影像去噪。張從梅等[9]針對(duì)遙感影像中存在非局部自相似性和稀疏性,提出一種基于非局部自相似性的遙感圖像稀疏去噪算法。Dabov等[10]提出了塊匹配協(xié)同3D過(guò)濾(block-matching and 3D filtering,BM3D)的去噪算法,這是一種利用“組塊”之間的相關(guān)性,通過(guò)聯(lián)合三維濾波實(shí)現(xiàn)影像去噪的方法。上述方法都能夠有效去除影像中的高斯噪聲,但是對(duì)椒鹽噪聲去除效果不佳,并且由于復(fù)雜的優(yōu)化問(wèn)題,往往在運(yùn)行效率方面需要大量的時(shí)間和計(jì)算成本。隨著深度學(xué)習(xí)的快速發(fā)展,Zhang等[11]提出了去噪卷積神經(jīng)網(wǎng)絡(luò)(denoising convolutional neural networks,DnCNN)模型,該模型對(duì)于傳統(tǒng)自然圖像的高斯降噪取得了不錯(cuò)的效果,但是對(duì)于地物紋理豐富的遙感影像降噪仍然存在一些不足,去噪結(jié)果容易出現(xiàn)邊緣紋理模糊的現(xiàn)象。吳從中等[12]利用殘差編解碼網(wǎng)絡(luò)結(jié)合邊緣增強(qiáng)來(lái)實(shí)現(xiàn)遙感圖像去噪,雖然能夠有效去除影像中的高斯噪聲,但是同樣對(duì)椒鹽噪聲去除效果不佳。
然而,在實(shí)際生產(chǎn)中,遙感影像所含噪聲并非是單一的,大多為同時(shí)包含高斯噪聲與椒鹽噪聲的混合噪聲,單一的傳統(tǒng)去噪方法在處理含有混合噪聲的遙感圖像時(shí)效果不理想。因此,朱建軍等[13]提出了一種三層組合濾波方法,將Bayes小波閾值濾波、自適應(yīng)Wiener濾波和自適應(yīng)中值濾波相結(jié)合,達(dá)到去除混合噪聲的目的。鄧開(kāi)元等[14]提出了將三維塊匹配算法和自適應(yīng)中值濾波相結(jié)合的組合濾波去噪方法。趙洪臣等[2]結(jié)合BM3D算法對(duì)高斯噪聲的有效去除能力,提出一種集成BM3D方法,用于去除遙感影像的混合噪聲。任超等[15]提出了將BM3D和多級(jí)非線性加權(quán)平均中值濾波相結(jié)合的去噪方法對(duì)遙感影像中的混合噪聲進(jìn)行去除。盡管組合濾波能夠達(dá)到去除混合噪聲的目的,但由于不同維度濾波之間的相互影響,最終都會(huì)殘留部分噪聲。
因此,在深度學(xué)習(xí)和空間域?yàn)V波去噪的基礎(chǔ)上,現(xiàn)提出一種遙感影像混合噪聲二階去除方法。第一階段,在DnCNN去噪模型的基礎(chǔ)上引入擴(kuò)張卷積,以增加網(wǎng)絡(luò)的感受野,便于在地物復(fù)雜的遙感影像中提取更多的特征信息,同時(shí)在網(wǎng)絡(luò)的深卷積層后引入DropoutLayer層,防止網(wǎng)絡(luò)出現(xiàn)過(guò)擬合,簡(jiǎn)化網(wǎng)絡(luò)訓(xùn)練難度,并且以航攝影像作為數(shù)據(jù)驅(qū)動(dòng)訓(xùn)練去噪模型,然后使用該模型對(duì)影像進(jìn)行初步降噪;第二階段,在自適應(yīng)中值濾波的基礎(chǔ)上采用最近鄰域像素加權(quán)中值替換原濾波窗口中值,對(duì)初步降噪結(jié)果進(jìn)行二次處理,以提高初步降噪結(jié)果的影像質(zhì)量,有效去除混合噪聲中的椒鹽噪聲,保留更多的影像邊緣細(xì)節(jié)及紋理特征。
1 相關(guān)算法原理介紹
1.1 DnCNN去噪模型
DnCNN模型在卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network,CNN)的基礎(chǔ)上使用殘差學(xué)習(xí)、正則化及批量歸一化等一系列方法來(lái)提高模型的去噪性能,能夠有效去除圖像中含有的高斯噪聲。DnCNN算法網(wǎng)絡(luò)架構(gòu)主要由三大部分組成:第一部分為第1層,由Conv+ReLU組成,Conv是大小為3×3×C的卷積核,總共有64個(gè),步長(zhǎng)為1×1,C用于區(qū)分灰度圖像和彩色圖像,如果輸入圖像為灰度圖,則C=1,如果輸入圖像為彩色圖,則C=3;第二部分為第2至(d-1)層,每一層均由Conv+BN+ReLU組成,Conv是大小為3×3×64的卷積核,每一層的卷積核個(gè)數(shù)均為64、步長(zhǎng)為1×1,BN為64個(gè)通道的批量歸一化層,ReLU為激活函數(shù)。第三部分為最后一層,由Conv組成,該部分使用C個(gè)3×3×64的濾波器對(duì)處理后的圖像進(jìn)行重構(gòu)輸出。
1.2 擴(kuò)張卷積
擴(kuò)大網(wǎng)絡(luò)的感受野是卷積神經(jīng)網(wǎng)絡(luò)中獲取更多上下文信息的一種常用方法。目前來(lái)說(shuō),擴(kuò)大感受野的常用方法主要有增加網(wǎng)絡(luò)深度、擴(kuò)大濾波器尺寸及使用擴(kuò)張卷積,然而,增加網(wǎng)絡(luò)深度會(huì)導(dǎo)致網(wǎng)絡(luò)性能下降,擴(kuò)大濾波器尺寸會(huì)引入更多的參數(shù)數(shù)量和增加網(wǎng)絡(luò)的計(jì)算量,而擴(kuò)張卷積可以在不增加網(wǎng)絡(luò)計(jì)算量的同時(shí)擴(kuò)大感受野[16]。擴(kuò)張卷積的原理是在標(biāo)準(zhǔn)的卷積核中注入空洞,以此來(lái)增加網(wǎng)絡(luò)的感受野,所以又將其稱(chēng)為空洞卷積或者膨脹卷積。例如,對(duì)于一個(gè)卷積核大小為3×3,擴(kuò)張因子為2,步長(zhǎng)為1,層數(shù)為n的擴(kuò)張卷積,其網(wǎng)絡(luò)感受野大小可以表示為(4n+1)×(4n+1);而對(duì)于一個(gè)卷積核大小為3×3,步長(zhǎng)為1,層數(shù)為n的普通卷積,其網(wǎng)絡(luò)感受野大小表示為(2n+1)×(2n+1)。
1.3 Dropout層
Dropout層是一種能夠提升網(wǎng)絡(luò)模型泛化能力、解決深度學(xué)習(xí)中網(wǎng)絡(luò)過(guò)擬合問(wèn)題的方法。其原理是對(duì)每一個(gè)隱含單元的權(quán)值設(shè)置一個(gè)服從Bernoulli分布的約束條件,如果這個(gè)約束條件被激活,則該單元將暫時(shí)以P概率從網(wǎng)絡(luò)中丟棄,這樣舍棄了部分特征,提高網(wǎng)絡(luò)的泛化能力,達(dá)到解決網(wǎng)絡(luò)過(guò)擬合的目的[17]。
1.4 自適應(yīng)中值濾波
傳統(tǒng)的自適應(yīng)中值濾波(adaptive median filter,AMF)是一種非線性濾波,不僅能夠有效地去除噪聲,而且在一定程度上能夠保留邊緣紋理細(xì)節(jié)。該方法在去噪過(guò)程中主要分為兩個(gè)進(jìn)程,可以定義為進(jìn)程A與進(jìn)程B。設(shè)X(i,j)為中心像素點(diǎn)(i,j)在進(jìn)行濾波時(shí)對(duì)應(yīng)的窗口(窗口允許的最大尺寸為Mmax),Zmin為窗口X(i,j)中灰度值的最小值,Zmax為窗口X(i,j)中灰度值的最大值,Imed為窗口X(i,j)中灰度值的中值,Z(i,j)為圖像像素點(diǎn)(i,j)位置上的灰度值。令
ZA1=Imed-Zmin
(1)
ZA2=Zmax-Imed
(2)
ZB1=Z(i,j)-Zmin
(3)
ZB2=Zmax-Z(i,j)
(4)
濾波具體算法流程如下。
(1)進(jìn)程A:如果ZA1>0且ZA2>0時(shí),轉(zhuǎn)入進(jìn)程B;否則,增大窗口X(i,j)尺寸。如果窗口尺寸等于或小于最大窗口尺寸Mmax,則重復(fù)進(jìn)程A,否則輸出該像素點(diǎn)灰度值Z(i,j)。
(2)進(jìn)程B:如果ZB1>0且ZB2>0時(shí),輸出該像素點(diǎn)灰度值Z(i,j),否則,輸出中值Imed。
2 本文算法構(gòu)建
雖然DnCNN降噪模型對(duì)于自然圖像的高斯降噪具有較好的效果,但是對(duì)于地形地物復(fù)雜的遙感影像,去噪效果一般,尤其是對(duì)于含有混合噪聲的影像,去噪結(jié)果仍然會(huì)存在較多的噪聲,并且邊緣細(xì)節(jié)及紋理信息不夠清晰。因此,在DnCNN模型與自適應(yīng)中值濾波的基礎(chǔ)上,提出一種遙感影像混合噪聲二階去除方法。
在第一階段,以DnCNN網(wǎng)絡(luò)結(jié)構(gòu)作為基礎(chǔ)框架搭建一階降噪模型DP-DnCNN,將網(wǎng)絡(luò)深度設(shè)置為20層,在1~19層中的偶數(shù)層中,采用擴(kuò)張因子為2的擴(kuò)張卷積(DilatedConv),以增加網(wǎng)絡(luò)的感受野,提升遙感影像特征提取能力,奇數(shù)層及第20層則采用普通卷積(Conv),并且在第19層的ReLU層后加入一層概率為0.5的DropoutLayer層,防止網(wǎng)絡(luò)出現(xiàn)過(guò)擬合,提升模型的泛化能力。網(wǎng)絡(luò)結(jié)構(gòu)主要分為5個(gè)部分,第1部分為輸入層,由一個(gè)ImageinputLayer構(gòu)成;第2部分為第1層,由Conv+ReLU組成;第3部分為第2~19層,由Conv+BN+ReLU和DilatedConv+BN+ReLU和Conv+BN+ReLU+DropoutLayer組成;第4部分為第20層,由一個(gè)Conv組成;第5部分為回歸輸出層,由一個(gè)RegressionLayer構(gòu)成。網(wǎng)絡(luò)輸入層輸入的影像大小為50×50×1,第1層的輸入通道為1,卷積核大小為3×3,輸出通道為64。第2~19層的輸入通道為64,卷積核為3×3,輸出通道為64。第20層的輸入通道為64,卷積核大小為3×3,輸出通道為1。
在第二階段,由于傳統(tǒng)的自適應(yīng)中值濾波是以其濾波窗口內(nèi)的中值替換噪聲點(diǎn)像素進(jìn)行輸出的,因此窗口內(nèi)中值的大小將直接影響去噪的效果及影像清晰度,當(dāng)中值像素點(diǎn)距離待替換噪聲點(diǎn)較遠(yuǎn)時(shí),會(huì)導(dǎo)致圖像失真,出現(xiàn)模糊現(xiàn)象。因此,本文對(duì)傳統(tǒng)的自適應(yīng)中值濾波進(jìn)行改進(jìn),提出自適應(yīng)最近鄰域權(quán)值中值濾波(RW-IAMF)。具體改進(jìn)方式如下,對(duì)于進(jìn)程B的中值輸出,采用最近鄰域像素加權(quán)中值替換原濾波窗口中值,使得輸出的像素中值更接近原圖像素,提升算法的去噪性能和邊緣細(xì)節(jié)、紋理特征的保留能力。圖1為最近鄰域像素示意圖,其中Z(i-1,j)、Z(i,j-1)、Z(i+1,j)、Z(i,j+1)4個(gè)像素點(diǎn)表示點(diǎn)Z(i,j)的最近鄰域像素點(diǎn)。
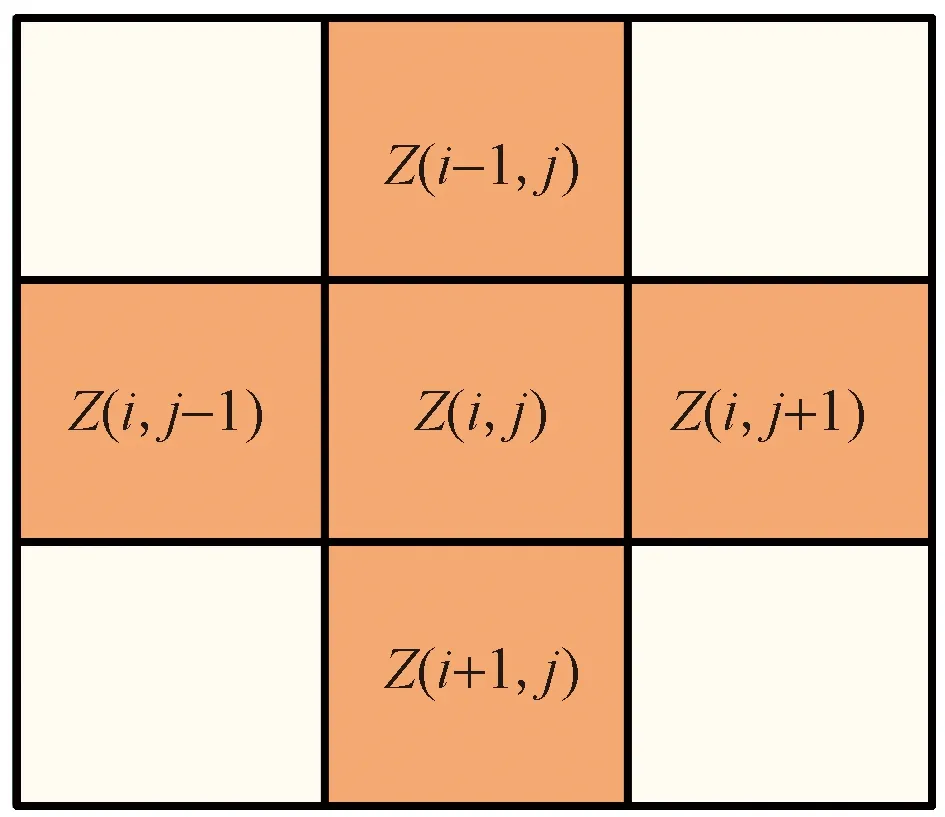
圖1 最近鄰域像素示意圖Fig.1 Schematic diagram of the nearest neighbor pixel
首先在當(dāng)前濾波窗口內(nèi)選取噪點(diǎn)的最近鄰域像素值集合W[f(i,j)],進(jìn)而對(duì)選取的最近鄰域像素值進(jìn)行噪聲檢測(cè)判斷:如果fn(i,j)=0或255,則將fn(i,j)判定為噪聲像素,予以剔除,其中fn(i,j)最近鄰域像素集合內(nèi)的某個(gè)像素值;對(duì)檢測(cè)后的最近鄰域像素值集合取中值Med(W[f(i,j)]),然后以這個(gè)中值為基礎(chǔ),參考文獻(xiàn)[18]中的加權(quán)計(jì)算方法,采用式(5)和式(6)計(jì)算集合內(nèi)每一個(gè)像素點(diǎn)的加權(quán)系數(shù),再采用式(7)將檢測(cè)后最近鄰域像素集合內(nèi)剩余的像素點(diǎn)與求得的對(duì)應(yīng)的加權(quán)系數(shù)進(jìn)行加權(quán)求和,最后將計(jì)算結(jié)果作為濾波輸出。

(5)

(6)
(7)
式中:Med{W[f(i,j)]}為最近鄰域像素值集合;fn(i,j)為最近鄰域像素集合內(nèi)的某個(gè)像素值;N為檢測(cè)后最近鄰域像素集合W[f(i,j)]內(nèi)剩余的像素點(diǎn)總個(gè)數(shù),wn(i,j)為求得的某個(gè)像素點(diǎn)的加權(quán)系數(shù)大小;f(i,j)為濾波輸出結(jié)果。
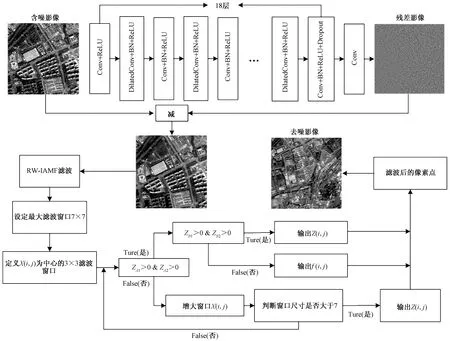
圖2 本文算法框架流程圖Fig.2 Flowchart of the algorithm framework of this paper
本文算法將第一階段訓(xùn)練好的降噪模型與第二階段改進(jìn)的自適應(yīng)中值濾波相結(jié)合,在有效去除混合噪聲的同時(shí)提升影像邊緣細(xì)節(jié)及紋理特征的保護(hù)能力。算法首先采用第一階段的降噪模型DP-DnCNN對(duì)含混合噪聲的影像進(jìn)行初步降噪,然后利用RW-IAMF對(duì)輸出影像進(jìn)行二次修正,提高算法對(duì)于混合噪聲中椒鹽噪聲的去除能力。算法具體框架流程如圖2所示。
3 實(shí)驗(yàn)設(shè)置與結(jié)果分析
3.1 網(wǎng)絡(luò)模型訓(xùn)練
對(duì)于DP-DnCNN網(wǎng)絡(luò)模型的訓(xùn)練,本文采用University of Twente Research Information提供的ITCVD航拍影像數(shù)據(jù)集作為訓(xùn)練集,其中包括135張像素為5 616×3 744×3的航拍影像,分辨率為0.1 m。為方便訓(xùn)練,在影像中隨機(jī)添加均值為0,方差為[0.001,0.01]范圍內(nèi)的高斯噪聲,并且將每張影像都隨機(jī)裁剪成512個(gè)50×50的小子塊,最終共訓(xùn)練69 120個(gè)小子塊。網(wǎng)絡(luò)訓(xùn)練輸入的影像大小為50×50,網(wǎng)絡(luò)訓(xùn)練求解器使用的是帶有動(dòng)量的隨機(jī)梯度下降(SGDM)優(yōu)化器,初始學(xué)習(xí)率設(shè)置為0.01且每迭代10個(gè)周期學(xué)習(xí)率下降為原來(lái)的1/10,小批量影像塊數(shù)量大小設(shè)置為128。為了防止梯度爆炸,使用梯度裁剪法穩(wěn)定訓(xùn)練,并將梯度閾值設(shè)置為0.005,指定梯度閾值法使用梯度的絕對(duì)值。將L2正則化因子參數(shù)設(shè)置為0.000 1,減少網(wǎng)絡(luò)過(guò)擬合。網(wǎng)絡(luò)訓(xùn)練是基于Matlab編程進(jìn)行的,硬件配置為64位Windows10系統(tǒng),11th Gen Intel(R) Core(TM) i7-11700@2.50 GHz,NVIDIA GeForce RTx 3060。
3.2 遙感影像去噪實(shí)驗(yàn)
為驗(yàn)證本文算法的可行性,利用高分2號(hào)衛(wèi)星拍攝的影像作為實(shí)驗(yàn)數(shù)據(jù)進(jìn)行遙感影像去噪實(shí)驗(yàn),截取影像數(shù)據(jù)大小為400×400像素,同時(shí)對(duì)截取的影像分別添加0.001/0.003、0.003/0.005、0.005/0.008(前者是均值為0的高斯噪聲方差,后者是椒鹽噪聲密度)3種不同濃度的噪聲,便于對(duì)去噪結(jié)果進(jìn)行定量、定性分析。采用均方誤差(MSE)[19]、峰值信噪比(PSNR)[20]、平均結(jié)構(gòu)相似度(MSSIM)[21]作為去噪效果評(píng)價(jià)指標(biāo),將本文算法與DnCNN算法、BM3D算法、DP-DnCNN與自適應(yīng)中值濾波結(jié)合算法(DPIA)、DnCNN與RW-IAMF結(jié)合算法(DNRW)、DnCNN與自適應(yīng)中值濾波結(jié)合算法(DNIA)、文獻(xiàn)[14]方法(BMIA)、文獻(xiàn)[15]方法(BMDJ)的去噪效果進(jìn)行比較,實(shí)驗(yàn)結(jié)果如表1~表3所示,其中MSE越小、PSNR越大表示去噪質(zhì)量越好,MSSIM更接近人眼的視覺(jué)評(píng)價(jià),其值越大表示去噪后得到的影像結(jié)構(gòu)越完整、保留的邊緣細(xì)節(jié)及紋理信息越多。通過(guò)表1~表3中的數(shù)據(jù)對(duì)比可以看出,對(duì)于遙感影像中的混合噪聲,本文算法降噪后得到的均方誤差和峰值信噪比均優(yōu)于其他對(duì)比算法,說(shuō)明本文所提算法針對(duì)遙感影像的混合噪聲降噪效果明顯優(yōu)于其他算法。對(duì)于平均結(jié)構(gòu)相似度這一指標(biāo),本文算法降噪后得到的MSSIM結(jié)果也均優(yōu)于其他對(duì)比算法,說(shuō)明本文所提算法相對(duì)于其他降噪算法來(lái)說(shuō),降噪后得到的影像結(jié)構(gòu)更完整,能夠保留更多的影像邊緣細(xì)節(jié)及紋理特征。
本文除了從MSE、PSNR和MSSIM 3個(gè)指標(biāo)進(jìn)行定性、定量評(píng)估之外,還在視覺(jué)層面對(duì)比了各算法的影像去噪效果。圖3為各算法在混合噪聲濃度為0.003/0.005下的去噪效果圖,分析圖3可以看出,本文算法不僅能夠有效去除影像中含有的混合噪聲,而且能夠更完整地保留影像結(jié)構(gòu)、影像邊緣細(xì)節(jié)及紋理特征,得到更清晰的影像。進(jìn)一步分析各算法去噪結(jié)果局部放大圖(圖4)可知,相比組合算法,單一的DnCNN算法和BM3D算法能夠有效去除影像中的高斯噪聲,但是都對(duì)影像中含有的椒鹽噪聲去噪效果不佳,導(dǎo)致殘余噪聲較多,并且BM3D算法在影像平滑區(qū)域仍然存在邊緣細(xì)節(jié)丟失,紋理區(qū)域模糊的問(wèn)題;DNIA算法、BMIA算法與DNRW算法能夠有效去除影像中的混合噪聲,但是仍然殘留有部分噪聲點(diǎn),相比DNIA與BMIA算法,DNRW算法受最近鄰域像素加權(quán)中值的影響,殘留的噪聲點(diǎn)相對(duì)較少;BMDJ算法能夠更徹底的去除影像中的混合噪聲,但是影像去噪結(jié)果的邊緣細(xì)節(jié)存在丟失問(wèn)題,并且影像紋理平滑的區(qū)域在視覺(jué)上產(chǎn)生了一定的模糊效果;DPIA算法較前幾種算法得到的影像去噪結(jié)果更清晰,保留的影像結(jié)構(gòu)比較完整,但是仍然存在殘余噪聲點(diǎn);比較以上算法的影像去噪結(jié)果,本文算法得到的去噪結(jié)果均優(yōu)于以上幾種方法,具有更接近于真實(shí)影像的視覺(jué)效果,不僅能夠有效去除影像中的混合噪聲,得到更清晰的

表1 各方法影像去噪結(jié)果的均方誤差(MSE)對(duì)比

表2 各方法影像去噪結(jié)果的峰值信噪比(PSNR)對(duì)比

表3 各方法影像去噪結(jié)果的平均結(jié)構(gòu)相似度(MSSIM)對(duì)比

圖3 各算法去噪效果圖Fig.3 Denoising effect diagram of each algorithm

圖4 各算法去噪效果局部放大圖Fig.4 Partial enlarged view of denoising effect of each algorithm
影像,而且能夠保留更多的影像邊緣細(xì)節(jié)及紋理信息,得到更完整的影像結(jié)構(gòu)。
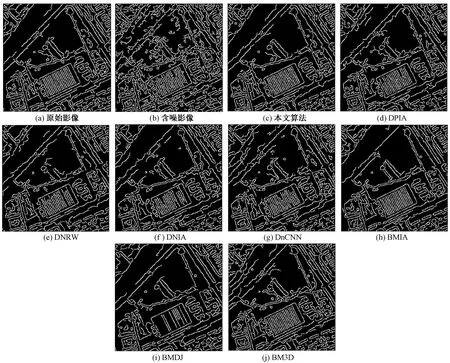
圖5 各算法去噪影像邊緣檢測(cè)結(jié)果圖Fig.5 Image edge detection results of denoising images by each algorithm
3.3 影像邊緣檢測(cè)
為了更直觀地說(shuō)明本文算法對(duì)于影像邊緣細(xì)節(jié)信息的保留能力,采用canny算子對(duì)各算法去噪結(jié)果進(jìn)行邊緣檢測(cè),檢測(cè)結(jié)果如圖5所示。從圖5中可以看出,對(duì)比原始影像和本文算法的檢測(cè)結(jié)果,BMIA、BMDJ兩種算法去噪后的影像輪廓線條較為稀疏,視覺(jué)效果不佳,尤其是BMDJ算法得到的結(jié)果,說(shuō)明原始影像中的一些邊緣細(xì)節(jié)信息在去噪過(guò)程中被當(dāng)作噪聲濾除,不能很好地保留影像的邊緣細(xì)節(jié)信息,而B(niǎo)M3D算法檢測(cè)結(jié)果中存在部分雜亂不連續(xù)的線條,說(shuō)明這種方法去噪后的影像仍然存在部分噪聲;DnCNN算法去噪后的影像相比原始影像邊緣檢測(cè)結(jié)果來(lái)看,存在較多雜亂的輪廓線條,說(shuō)明受椒鹽噪聲的影響,去噪后的影像仍然殘留有較多的噪聲,并且從圖中還可以看出影像的部分細(xì)節(jié)信息也被當(dāng)作噪聲濾除;DPIA、DNRW、DNIA 3種算法去噪后影像邊緣檢測(cè)結(jié)果相比原始影像與本文算法的邊緣檢測(cè)結(jié)果,仍然存在少量不連續(xù)的線條,并且存在部分地物輪廓丟失的現(xiàn)象,說(shuō)明3種算法去噪后結(jié)果仍然存在少量噪聲且不能很好地保留影像的邊緣細(xì)節(jié)信息;相比上述方法,本文算法去噪后影像得到的邊緣輪廓線條較為連續(xù),與原始影像的邊緣檢測(cè)結(jié)果較為相似,能夠恢復(fù)影像中地物的大致輪廓信息,說(shuō)明本文算法不僅能夠有效去除影像中的混合噪聲,而且可以保留更多的影像邊緣細(xì)節(jié),便于后期影像的分類(lèi)、識(shí)別應(yīng)用。
4 結(jié)論
遙感影像噪聲會(huì)對(duì)影像后續(xù)的使用和研究產(chǎn)生較大的影響,因此去噪是遙感影像處理中必不可少的環(huán)節(jié)。針對(duì)影像中存在的混合噪聲,將航攝影像作為訓(xùn)練數(shù)據(jù)驅(qū)動(dòng),在DnCNN去噪模型的基礎(chǔ)上引入擴(kuò)張卷積及DropoutLayer層訓(xùn)練第一階段的高斯降噪模型,并且與第二階段的自適應(yīng)最近鄰域權(quán)值中值濾波結(jié)合,提出了一種遙感影像混合噪聲二階去除方法。分析遙感影像去噪實(shí)驗(yàn)結(jié)果及去噪影像邊緣檢測(cè)結(jié)果,無(wú)論從主觀視覺(jué)效果還是從客觀質(zhì)量評(píng)價(jià)來(lái)看,本文方法都具有較好的去噪性能,且去噪效果優(yōu)于傳統(tǒng)去噪方法,能夠有效去除影像中的高斯、椒鹽混合噪聲,較好地保留影像邊緣細(xì)節(jié)及紋理特征,獲得更清晰的影像結(jié)果,可應(yīng)用于實(shí)際的遙感影像去噪處理。
