表貼式永磁同步電機多步預測控制簡化算法
2022-12-04 11:38:42李耀華蘇錦仕秦輝趙承輝秦玉貴周逸凡
電機與控制學報 2022年11期
關鍵詞:控制策略
李耀華, 蘇錦仕, 秦輝, 趙承輝, 秦玉貴, 周逸凡
(長安大學 汽車學院,陜西 西安 710064)
0 引 言
永磁同步電機(permanent magnet synchronous machine,PMSM)具有體積和質量小、機電能量轉換效率高等優點,被廣泛應用于電動汽車、軌道交通和風力發電等領域[1]。有限集模型預測轉矩控制(finite control set-model predictive torque control,FCS-MPTC)直接利用變換器離散特性和開關狀態有限的特點,將由逆變器開關狀態直接確定的基本電壓矢量作為控制量,通過枚舉所有控制量求得最優解,近年來成為永磁同步電機研究的熱點[2-7],目前研究主要為單步預測控制[8-10]。
近年來,多步預測控制逐步受到關注[11-12]。如果仍采用單步預測使用的枚舉搜索法(exhaustive search algorithm,ESA)求多步預測控制成本函數的最優解,則計算量會隨著預測步數的增加而呈指數增長,無法在極短采樣時間內完成運算。因此要將多步預測控制應用于電機控制系統,必須研究適當的簡化方法。文獻[13]建立了一種轉矩和磁鏈解耦的簡化多步預測控制模型,使用查表法和加法運算進行多步預測,與含有平方根和三角函數的傳統預測控制模型相比,運算量較小,并利用每一步預測的成本函數限制控制量的選擇范圍,避免了對所有控制量的枚舉,在較短的采樣周期內實現多步預測控制。文獻[14-15]提出一種兩步預測的簡化算法,在單個控制周期內僅考慮最優和次優開關狀態,確保在兩個控制周期內所選開關狀態最優。文獻[16-17]將多步預測控制的優化問題轉換為整數最小二乘問題,使用球面解碼算法求得最優解。文獻[18]采用滑動時域策略,將預測時域分成兩部分,第一部分離當前時刻較近,使用較小的采樣時間Ts進行高分辨率采樣,第二部分離當前時刻較遠,以Ts的倍數作為采樣時間進行粗略采樣,實現了較多步數的預測控制,而且降低了運算量。文獻[19]采用分支定界法,當目標函數值達到預先設定的上下限,或者計算步驟數超過設定閾值,則停止多步預測控制優化過程以減少平均計算量。
本文建立兩電平三相逆變器驅動的表貼式永磁同步電機(surface PMSM, SPMSM)多步FCS-MPTC模型,分析傳統MPTC算法(traditional-MPTC, T-MPTC)的運算量,然后在文獻[21]“精簡電壓矢量集合”法(simplified set-MPTC, S-MPTC)基礎上,提出一種多步MPTC新型簡化算法—“電壓矢量保持”MPTC算法(voltage preserving-MPTC,P-MPTC),該算法能在一定條件下避免遍歷備選電壓矢量集中的所有電壓矢量,從而進一步減少運算量。定義性能和運算量評價指標后,對所提出算法的控制性能和運算量進行評估,與T-MPTC、S-MPTC算法進行對比分析,驗證所提出算法的有效性。
1 SPMSM未簡化多步MPTC算法
1.1 表貼式永磁同步電機數學模型
忽略定子電阻壓降,表貼式永磁同步電機在定子x-y坐標系下磁鏈和轉矩方程分別為:
(1)
(2)
式中:us、is分別為定子電壓矢量、定子電流矢量;ψs、ψf、Te分別為定子磁鏈矢量、永磁體磁鏈矢量、電機轉矩矢量;Rs為定子電阻;p為電機極對數;Ld為d軸電感;δ為轉矩角。
1.2 多步MPTC模型
控制量為兩電平三相逆變器的7個基本電壓矢量,即
Vs∈{V0,V1,V2,V3,V4,V5,V6}。
(3)
零電壓矢量可以由兩個開關狀態(000和111)生成,以開關次數最小原則來選擇具體開關狀態。
由于采樣周期極短,忽略電機轉子旋轉運動和定子電阻壓降,定子磁鏈x-y坐標系下,k時刻施加電壓矢量Vs后,k+1時刻的定子磁鏈幅值為:
(4)
(5)
忽略一個采樣周期內轉子旋轉運動,近似認為定子磁鏈角位置變化量與轉矩角變量相等,則k+1時刻的定子磁鏈角位置、k+1時刻的轉矩角分別為:
(6)
(7)
式中:θs(k)為k時刻的定子磁鏈角位置;δ(k)為k時刻的轉矩角。
k+1時刻的電機轉矩值為

(8)
式(4)~式(8)稱為SPMSM預測轉矩控制基本模型,多步MPTC每一步預測計算都要使用這個基本模型,下文簡稱為“基本模型”。模型預測轉矩控制“基本模型”計算流程如圖1所示。
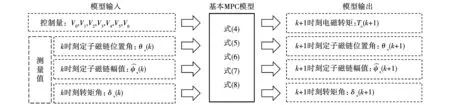
圖1 MPTC“基本模型”
1.3 成本函數計算和參考值確定
N(N為正整數)步預測中第i步預測的成本函數為
(9)

將每一步的成本函數gi累加起來,得到一個總的成本函數,即
(10)
當采樣頻率較高時,可近似以k時刻的參考值作為k+i時刻的參考值,即
(11)
多步模型預測控制通常采用滾動時域控制策略(receding horizon control,RHC)確定逆變器的開關狀態。在k時刻選出使得總成本函數g最小的控制變量序列作為k時刻最優控制變量序列,在k+1時刻僅將最優控制變量序列的第一個分量作用于電機控制系統,并在k+1時刻根據最新的電機狀態觀測值重新預測,得到對應于k+2時刻的最優控制變量序列,即在每一個采樣周期都重復進行開關狀態的優化過程,在下一個周期僅施加最優序列的第一個控制量,不斷向控制回路提供反饋。
1.4 傳統多步MPTC算法流程與運算量
在k時刻基于枚舉算法的傳統N步(N為正整數)MPTC(T-MPTC)的步驟為:
3)以此類推,將(k+i-1)步的預測值和7個備選電壓矢量帶入至“基本模型”,可到k+i步的預測值。遍歷結束后,最終得到7N個控制序列。
4)依次將每一個控制序列對應的轉矩、定子磁鏈幅值預測值帶入成本函數式(10),選出使成本函數值最小的控制序列作為最優控制序列。至此完成k時刻的N步預測運算。
5)根據滾動時域控制策略,僅將步驟4)中得到的最優控制序列的第一個控制量作用于k+1時刻,并在k+1時刻根據電機最新的狀態,開始k+1時刻的N步預測運算,重復步驟1)~5)。
由此可得,N步MPTC控制系統的結構如圖2所示。
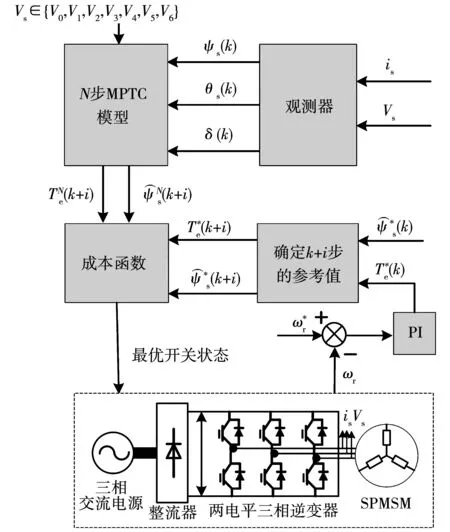
圖2 N步MPTC系統的結構圖
對于M個備選控制量的N步T-MPTC而言,在一個采樣周期內需要調用“基本模型”的次數為
(12)
得到7N個電壓控制序列。
隨著備選控制量個數M、預測步數N的增大,運算量會急劇增加。T-MPTC算法中,備選控制量個數M= 7,隨著預測步數N的增加,運算量呈指數形式上升,電機控制系統難以在極短采樣時間內完成運算,因此需要研究簡化算法。
2 SPMSM多步MPC簡化算法
文獻[21]對7個備選電壓矢量的利用率進行統計,剔除利用率較低的電壓矢量,得到精簡電壓矢量集合,減小了MPTC計算量。為方便表述,將文獻[21]中的簡化方法稱為“精簡電壓矢量集合”法。文獻[21]中的一個精簡電壓矢量集合如表1所示,其中:φ、τ分別為磁鏈和轉矩滯環控制信號;w為定子磁鏈所在扇區。函數f(x)表示電壓矢量序號,mod表示取余運算,則有
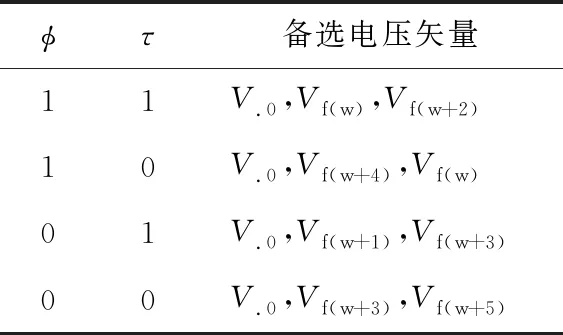
表1 精簡電壓矢量集合
f(x)=mod(x-1,6)+1,x=1,2,3,4,5,6。
(13)
由表1可知,精簡電壓矢量集合中的元素隨著定子磁鏈扇區、轉矩和磁鏈控制信號φ、τ變化,備選電壓矢量個數從7個精簡到3個。使用精簡電壓矢量集合可以縮小電壓矢量的選擇范圍,但每一步預測中仍然需要遍歷每一個備選電壓矢量,運算量仍然較大。
在文獻[21]的基礎上,本文提出一種采用“電壓矢量保持”策略的多步MPTC簡化算法,在滿足一定規則時,k+p步預測可以直接采用(k+p-1)步選擇的電壓矢量,而無需遍歷所有備選電壓矢量,進一步簡化運算。P-MPTC控制策略如下:
1)k+1步:使用精簡集合中備選的3個電壓矢量進行預測。
2)k+p步:p為整數且2≤p≤N,設k+p步可選擇的電壓矢量集合為Φ,(k+p-1)步選擇的電壓矢量為Vj。若Vj∈Φ,則(k+p)步直接選擇電壓矢量Vj,不再需要遍歷集合Φ中的其他電壓矢量;否則將遍歷集合Φ中所有3個電壓矢量,并選出使(k+p)步的成本函數最小的電壓矢量作為(k+p)步最終選擇的電壓矢量。
傳統T-MPTC每一步預測都需要枚舉7個控制量,S-MPTC算法中,每一步預測都需要枚舉3個控制量,P-MPTC算法每一步預測最多需要枚舉3個控制量,特定情況下,每一步只需要進行一次預測計算,從而進一步簡化預測計算量。
3 仿真驗證
仿真對比T-MPTC、S-MPTC、P-MPTC 3種控制策略下N步MPTC的實際控制效果和運算量,預測步數N分別取1~6。
3.1 仿真條件和評價指標
仿真時長為2 s,采樣周期Ts為50 μs。直流母線電壓Udc為312 V。參考轉速初始值為500 r/min,0.5 s時階躍至750 r/min,1.5 s時階躍至500 r/min。負載轉矩初始為10 N·m,1 s時階躍至20 N·m。參考定子磁鏈幅值為0.3 Wb。轉矩環PI參數Kp=10,KI=5×10-5,轉矩滯環寬度為0.02 N·m。定子磁鏈幅值滯環寬度為0.002 Wb。仿真用SPMSM參數如下:定子電阻為0.2 Ω;d軸和q軸電感均為0.008 5 H;轉子磁鏈0.175 Wb;電機極對數為4;轉動慣量0.089 kg·m2;粘滯阻尼0.005 N·m·s。
定義電機控制效果評價指標為轉矩脈動均方根誤差TRMSE、轉速均方根誤差ωRMSE和定子磁鏈幅值均方根誤差ψRMSE分別如下:
(14)
(15)
(16)

定義運算量的評價指標為絕對運算次數Tcal_all、相對運算量λ、運算量增長率η。
絕對運算次數Ttotal表示整個仿真時長內“基本模型”被調用的次數,對于T-MPTC和S-MPTC,可以直接用下式計算運算次數:
Ttotal=nTone_step。
(17)
式中Tone_step為一個采樣周期內的“基本模型”被調用的次數,可由式(12)計算,n為采樣周期個數。由于P-MPTC的每一步運算次數并不固定,Ttotal不能直接用公式計算,需要預測過程中實時統計。
由于各個策略的實際運算次數可能相差較大,不便于直接觀察比較,進一步采用相對運算量和運算量增長率評價指標。
相對運算量λ:在特定預測步數N時,一個控制策略的絕對運算次數與T-MPTC的絕對運算次數之比,可以反映同一預測步數時,不同控制策略間的運算量差異。
運算量增長率η:同一種控制策略N步MPTC與N-1步MPTC的絕對運算次數之比,可以反映同一種控制策略的運算量與預測步數N的關系。
3.2 控制性能對比
圖3~圖5給出了T-MPTC、S-MPTC、P-MPTC 3種控制策略在不同預測步數N時的性能評價指標變化情況。由圖可知:與T-MPTC算法相比,S-MPTC算法和P-MPTC算法的轉速均方根誤差ωRMSE、轉矩均方根誤差TRMSE、定子磁鏈幅值均方根誤差ψRMSE都有小幅上升,表明兩種簡化策略均犧牲了部分磁鏈和轉矩控制性能。
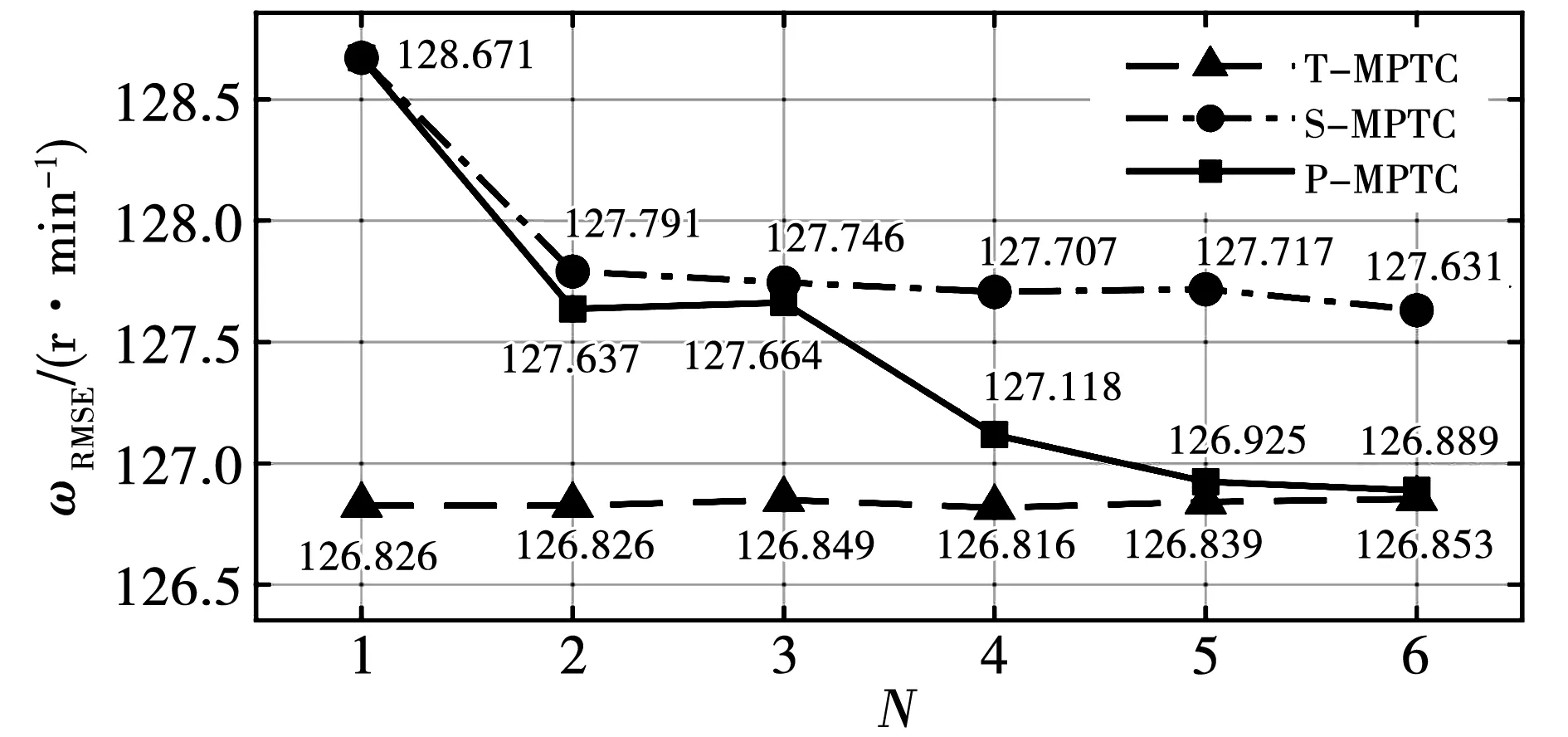
圖3 電機轉速均方根誤差
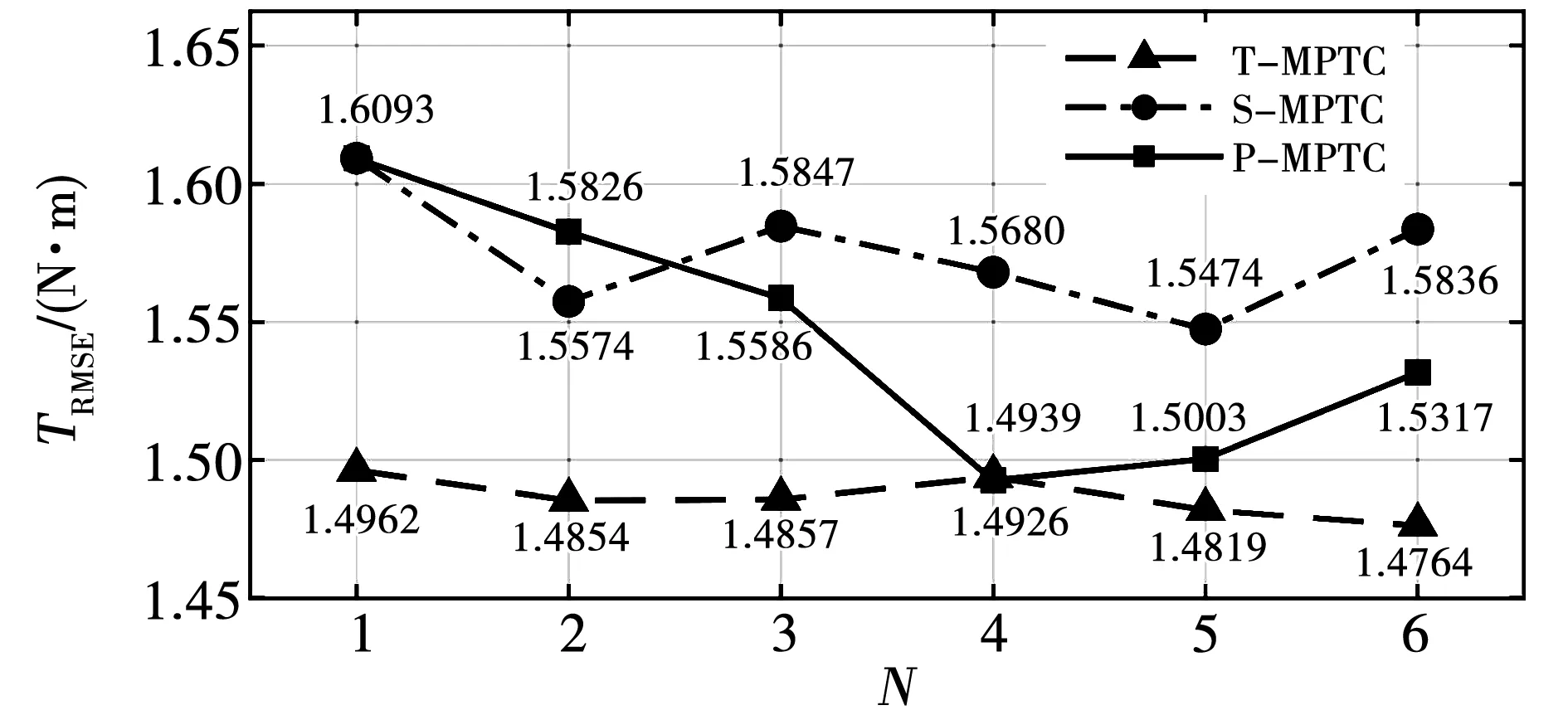
圖4 電機轉矩均方根誤差
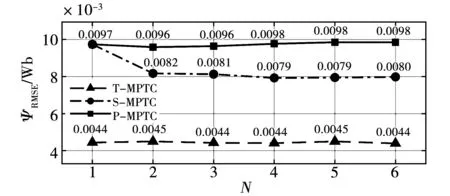
圖5 定子磁鏈幅值均方根誤差
圖6為預測步數N=5時,3種控制策略對應的電機轉矩、定子磁鏈幅值、轉速、A相定子電流的波形圖。圖6表明:3種控制策略下,電機系統運行良好,控制性能基本相當。與其他兩種算法相比,P-MPTC算法的定子磁鏈幅值脈動略大,但是電機轉速值、轉矩值仍能較快跟蹤相應參考值的變化,動態響應性能基本不變。
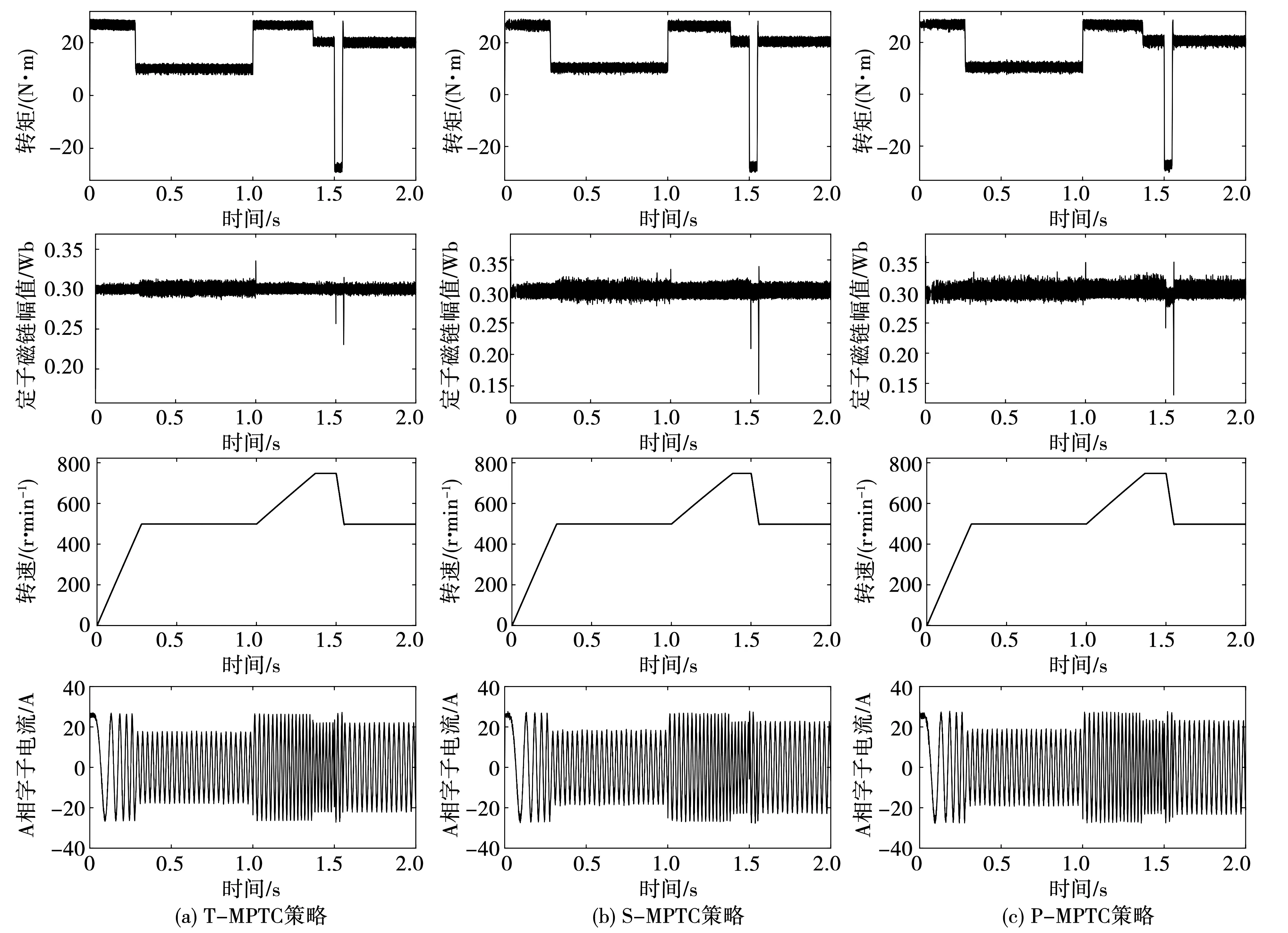
圖6 N=5時,3種控制策略的控制性能
3.3 運算量對比
圖7、圖8分別表示不同控制策略的運算量增長率、相對運算量與預測步數N的關系。可見,S-MPTC和P-MPTC算法均能明顯減小運算量,且P-MPTC算法的運算量更小,表明在精簡集合的基礎上施加“電壓矢量保持”策略,可以進一步減少運算量。例如,當N=6,S-MPTC算法相對運算量λ約為0.8%,而P-MPTC算法的相對運算量λ約為0.02%,即僅相當于T-MPTC算法運算量的0.02%,從而極大簡化了多步MPTC運算。
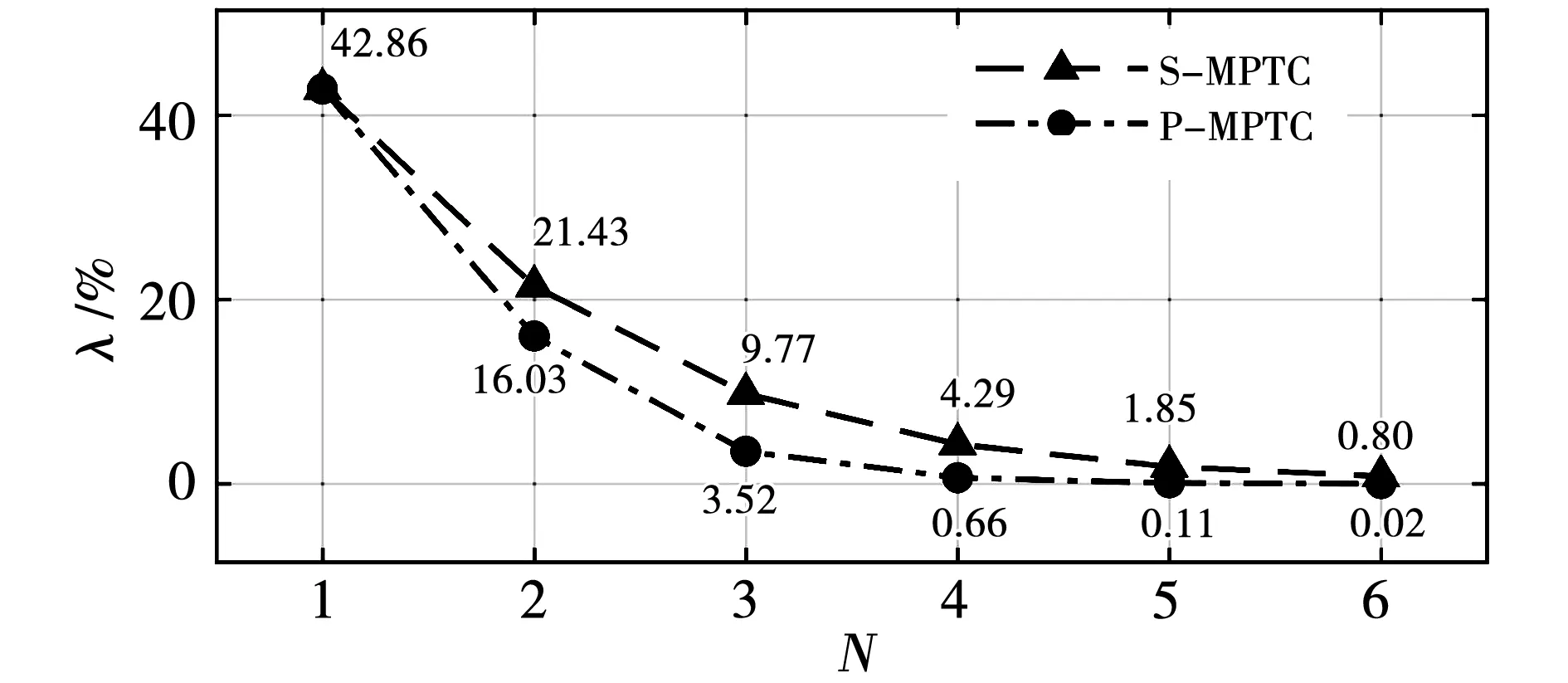
圖7 相對運算量變化曲線
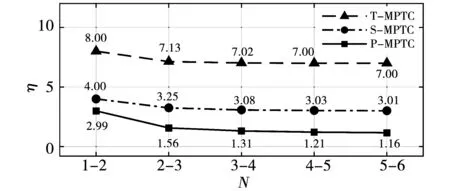
圖8 不同控制策略的運算量增長率
隨著預測步數N的增加,S-MPTC、P-MPTC算法的運算量增長率η、相對運算量λ都在減小,表明預測步數N越大,簡化效果越明顯。在預測步數N較小時(N=1, 2, 3),η、λ變化較為迅速,而預測步數較大時(N=4,5,6),運算量增長率η曲線、相對運算量λ曲線都在逐漸變得平緩,表明簡化效果逐漸趨于平穩。

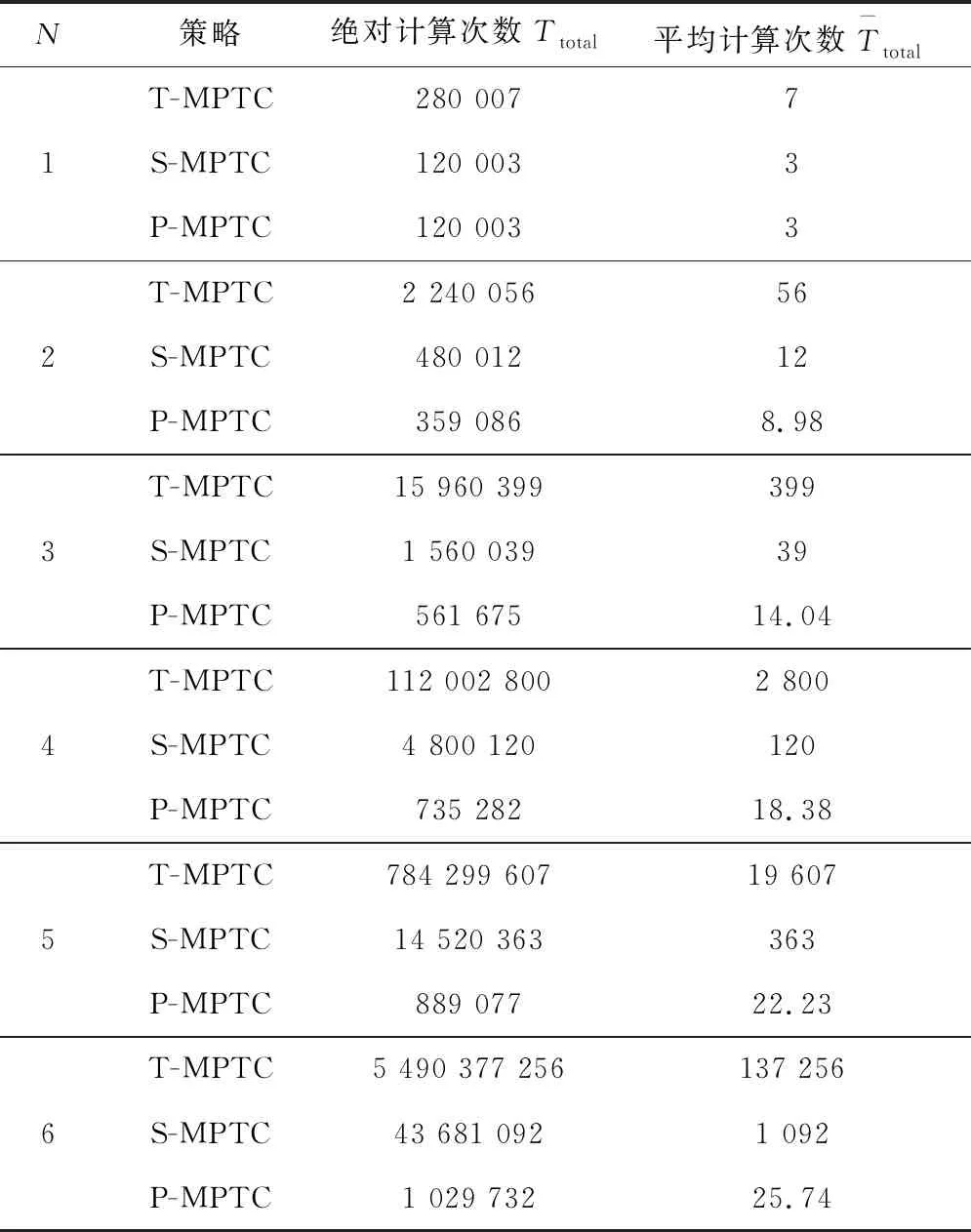
表2 仿真過程的絕對計算次數與平均計算次數
由表可知,S-MPTC和P-MPTC算法極大降低了平均計算次數。以六步預測為例,T-MPTC平均計算次數為137 256次,S-MPTC平均計算次數為1 092次,而P-MPTC平均計算次數僅為25.74次。
綜合可知,在精簡集合的基礎上施加“電壓矢量保持”策略的簡化算法,可在保證電機轉矩、磁鏈、轉速控制性能基本不變的情況下,顯著減少多步MPTC的運算量。
4 硬件平臺驗證
基于STM32H743單片機平臺對以上3種控制策略進行單步測試,測試不同算法的執行時間。
單步測試電機控制系統參數與上文仿真系統相同。單步測試初始值如下:定子磁鏈幅值為0.313 5 Wb;定子磁鏈角位置為 36.027 9°;參考轉矩值為10.730 6 N·m;轉矩值為9.151 2 N·m;轉矩角為14.116 0°;定子磁鏈參考值為0.3 Wb;電機轉速為498.927 3 r/min。
為了分析不同算法的運行時間,將算法程序運行時間分為以下3部分:
1)預測計算時間(t1),用于計算k+i步的預測值;
2)判斷過程時間(t2),簡化策略額外增加的時間,用于確定轉矩、磁鏈滯環控制信號,確定備選電壓矢量等;
3)評價過程時間(t3),用于計算成本函數,選出最優電壓矢量序列。
預測步數N取1~6。對每種控制策略的不同預測步數N,在單片機重復執行10次,并取執行時間的平均值作為算法執行時間。3種MPTC算法的硬件執行時間和結果如表3所示,表中的總時間為預測計算時間、評價過程時間、判斷過程時間之和,執行次數為本次單步測試中“基本模型”被調用的次數。
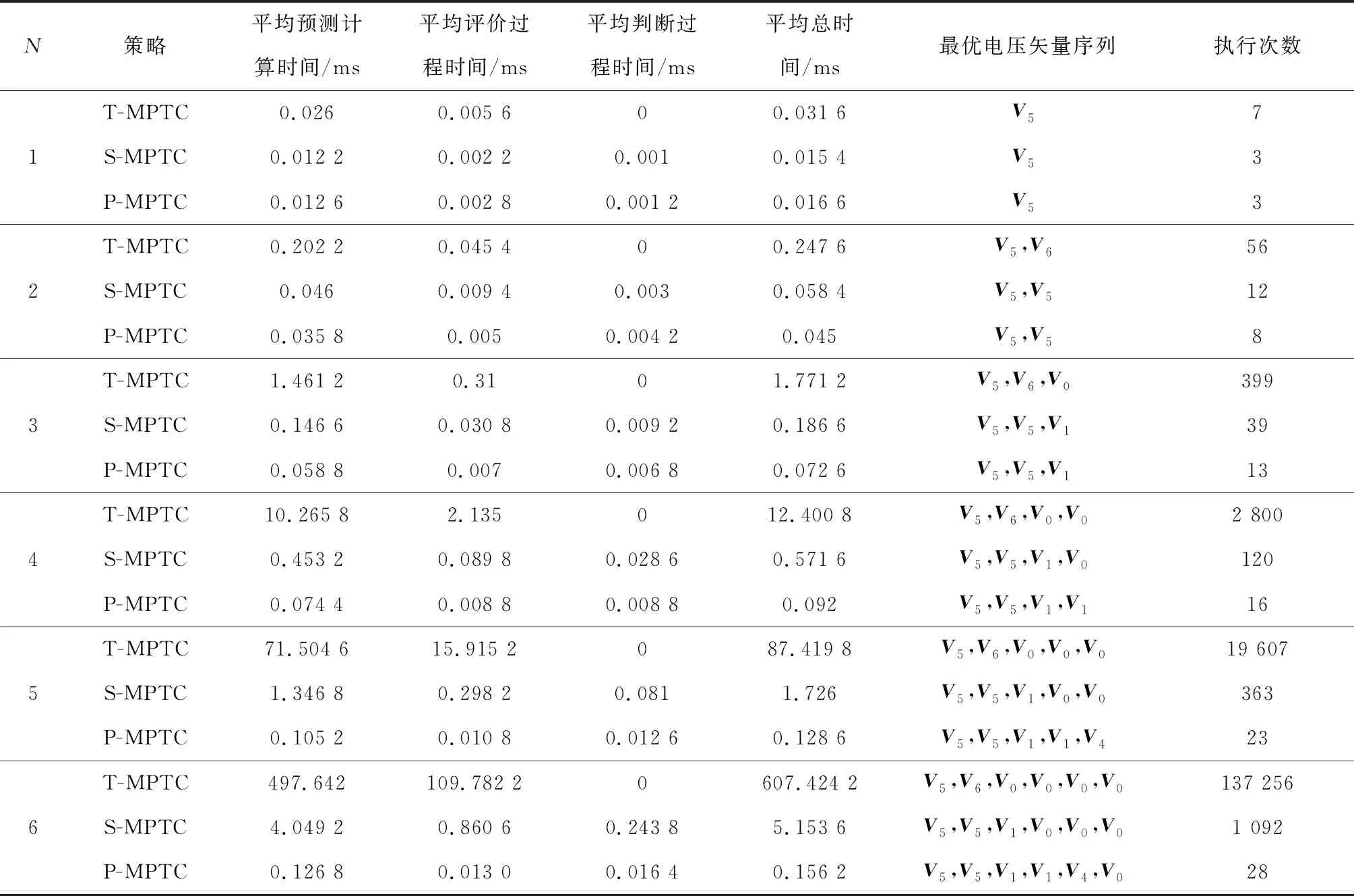
表3 3種MPTC算法的硬件執行時間和計算結果
表3同樣表明S-MPTC和P-MPTC兩種簡化算法均能較大幅度降低預測計算和評價過程所需時間。雖然簡化算法需要額外增加判斷過程時間,但其遠小于預測計算和評價過程時間的減少量。因此,簡化算法總執行時間遠小于T-MPTC執行時間。
以六步預測為例,與T-MPTC相比,S-MPTC和P-MPTC雖然增加一個判斷過程,增加0.243 8和0.016 4 ms計算耗時,但減小“基本模型”調用次數,將執行次數從137 256次分別減少到1 092次和28次,從而減小預測計算和評價過程時間。與T-MPTC相比,預測計算用時由497.642 ms減小到4.049 2和0.123 8 ms,評價過程用時由109.782 2 ms減小到0.860 6和0.013 0 ms,執行總時間由607.424 2 ms減小到5.153 6和0.156 2 ms。由此可見,S-MPTC和P-MPTC極大減小計算運算量,提高系統實時性能。
對于單步測驗驗證,將相對運算量λ定義為對于每一個預測步數N,各控制策略執行總時間與T-MPTC算法執行總時間之比。將運算量增長率η定義為同一種控制策略的N步預測與N-1步預測的執行總時間之比。仿真和硬件執行過程的相對運算量λ、運算量增長率η的數據如表4所示。
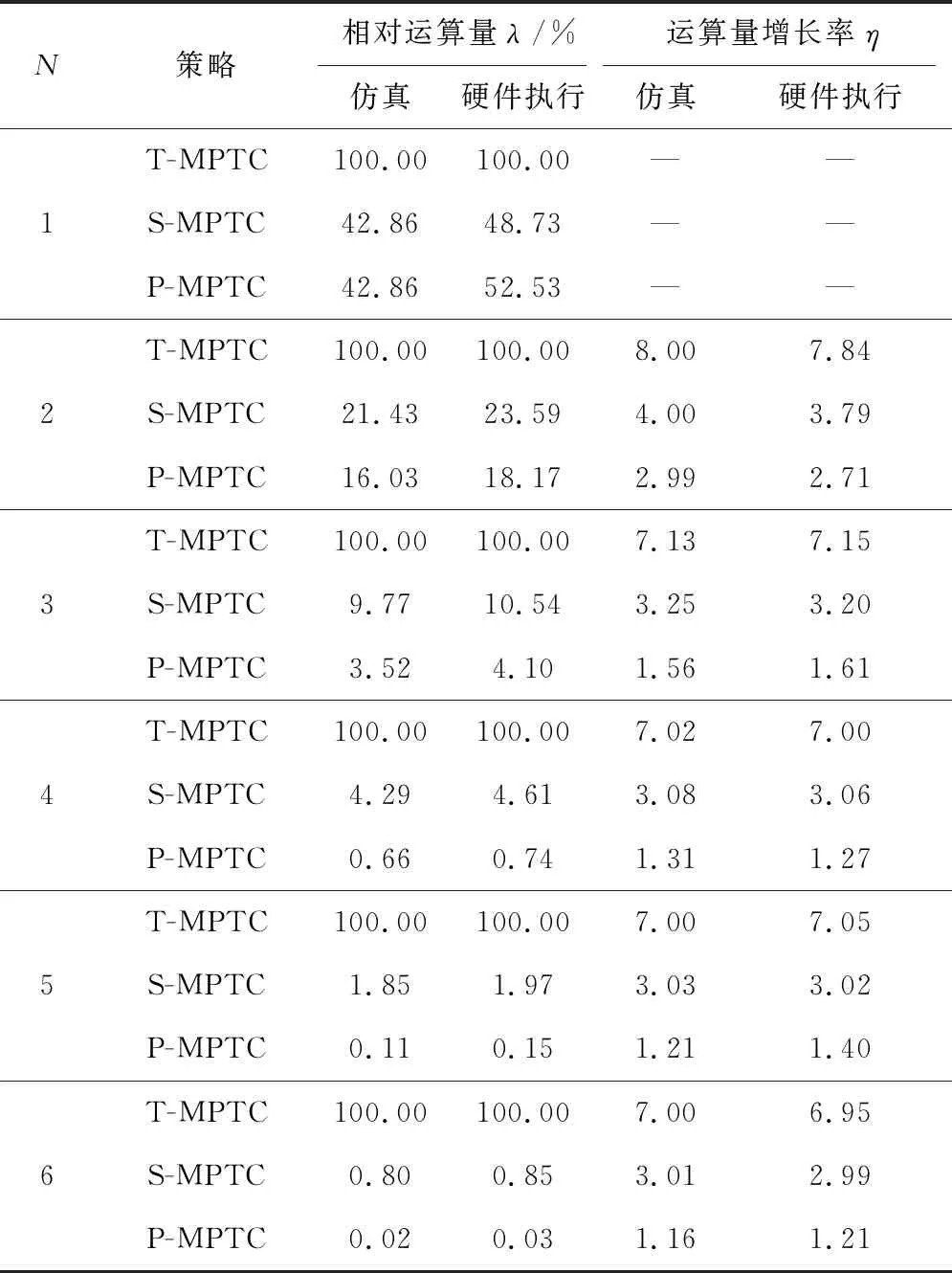
表4 仿真過程和硬件執行運算量指標對比
表4表明,仿真和硬件執行過程的相對運算量和運算量增長率結果基本吻合,進一步驗證了S-MPTC、P-MPTC算法均能明顯減小運算量,且P-MPTC算法簡化效果更顯著的結論。
5 結 論
本文建立了表貼式永磁同步電機的多步FCS-MPTC模型,并在“精簡電壓矢量集合”法的基礎上,提出一種新型簡化算法,定義了“相對運算量”、“運算量增長率”兩個運算量評價指標。所提出的算法采用“電壓矢量保持”策略,一方面,將備選控制量數量從7個減少到3個,縮小每一步預測中控制量選擇范圍;另一方面,在滿足特定規則時,某一步預測可以直接采用上一步預測選擇的電壓矢量,避免遍歷備選電壓矢量集中的所有電壓矢量,與“精簡電壓矢量集合”法相比,進一步降低了多步預測的運算量和復雜度。仿真結果和單片機平臺執行結果驗證了該算法的有效性,所提出的算法能保證電機轉矩、轉速、磁鏈控制性能、動態響應性能基本不變的前提下,極大減少多步模型預測運算量。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
