基于網(wǎng)絡攝像與互聯(lián)網(wǎng)技術的智能測量系統(tǒng)設計
2022-12-02 01:57:04胡克用朱佳偉曹世華
通信電源技術 2022年14期
胡克用,朱佳偉,謝 奧,曹世華,安 群
(1.杭州師范大學 錢江學院,浙江 杭州 310018;2.杭州師范大學 工學院,浙江 杭州 310018)
0 引 言
隨著網(wǎng)絡攝像技術、機器視覺技術的高速發(fā)展和處理器性能的提升,測量系統(tǒng)的智能化程度越來越高[1]。越來越多的智能測量系統(tǒng)逐漸涌現(xiàn),它們多采用機器視覺技術通過攝像機將靜態(tài)的觀察目標轉換為數(shù)字圖像信號,再由圖像處理系統(tǒng)處理圖像數(shù)據(jù)并提取其中的信息[2]。這種方式局限性較大,對于運動中觀察目標的測量結果偏差較大甚至無法測量。針對此類問題,提出一種基于網(wǎng)絡攝像與互聯(lián)網(wǎng)技術的智能測量系統(tǒng)。針對單擺運動中的被測物,使用機器視覺的處理方法通過網(wǎng)絡攝像機拍攝其單擺運動狀態(tài),借助樹莓派、以太網(wǎng)交換機、實時流協(xié)議(Real Time Streaming Protocol,RTSP)來獲取網(wǎng)絡攝像機視頻流。
1 系統(tǒng)總體設計
基于網(wǎng)絡攝像與互聯(lián)網(wǎng)技術的智能測量系統(tǒng)結構如圖1所示。
系統(tǒng)使用2個正交拍攝被測物的網(wǎng)絡攝像機模塊、1個以太網(wǎng)交換機模塊、3個樹莓派模塊(節(jié)點樹莓派A、節(jié)點樹莓派B、終端樹莓派C)、2個液晶顯示器(Lipuid Crystal Display,LCD)(分別連接節(jié)點樹莓派A和節(jié)點樹莓派B)以及1個終端顯示器(使用數(shù)據(jù)線與終端樹莓派C連接)。采用外部供電方法,供電給網(wǎng)絡攝像機,樹莓派、以太網(wǎng)交換機以及終端顯示器。2臺網(wǎng)絡攝像機將拍攝到的視頻傳輸至以太網(wǎng)交換機,樹莓派通過以太網(wǎng)交換機來獲取網(wǎng)絡攝像機視頻流。節(jié)點樹莓派驅動LCD顯示屏,可以實時顯示當前樹莓派拍攝的視頻,終端樹莓派C運行OpenCV程序,對擺動的物體進行實時追蹤,記錄運動軌跡,用方框實時框住被測物體輪廓,并在顯示器中呈現(xiàn)出所測量的長度與角度等參量。
2 系統(tǒng)主要硬件設計
2.1 處理器
本設計使用的核心處理器為樹莓派,采用Linux作為操作系統(tǒng)。樹莓派可以通過USB端口連接顯示器、鍵盤、鼠標,通過RJ45以太網(wǎng)端口連接交換機,這樣就具備了普通電腦的基本功能,能執(zhí)行傳輸數(shù)據(jù)、數(shù)據(jù)處理、播放網(wǎng)絡攝像機拍攝的高清視頻等功能。
2.2 網(wǎng)絡攝像機
由于網(wǎng)絡攝像機(IP Camera,IPC)具有比普通攝像機畫質清晰、壓縮比高、可直接連交換機且性能穩(wěn)定等優(yōu)勢,因此本設計中使用海康威視的網(wǎng)絡攝像機。
2.3 以太網(wǎng)交換機
以太網(wǎng)交換機是用來構建局域網(wǎng)傳輸數(shù)據(jù)的重要硬件設備,本設計使用5口百兆以太網(wǎng)交換機,網(wǎng)絡攝像機利用網(wǎng)線連接至以太網(wǎng)交換機的RJ45端口。樹莓派也是利用網(wǎng)線連接至以太網(wǎng)交換機的RJ45端口,這樣以太網(wǎng)交換機上電啟動后,局域網(wǎng)也就構建完成。
3 系統(tǒng)軟件設計
3.1 節(jié)點樹莓派程序設計
節(jié)點樹莓派A、B分別對網(wǎng)絡攝像機A、B拍攝得到的視頻流進行HSV轉化,即從RGB空間轉化至HSV空間[3]。HSV空間中:H代表色相角,范圍是0°~360°;S代表飽和度,范圍是0~1;V代表亮度,范圍是0~1。RGB空間中:R代表紅坐標值,范圍為0~255的實數(shù);G代表綠坐標值,范圍為0~255的實數(shù);B代表藍坐標值,范圍為0~255的實數(shù)。(R,G,B)構成RGB坐標,在RGB空間中表示所有顏色。RGB空間轉化至HSV空間時,轉化公式為
色相角H計算公式為
飽和度S計算公式為
亮度V計算公式為
式中:(R',G',B')分別是(R,G,B)二值化后的數(shù)值;Cmax表示(R',G',B')中的最大值;Cmin表示(R',G',B')中的最小值;Δ表示Cmax與Cmin之間的差值。
通過HSV轉化后進行HSV二值化,然后需要進行圖像濾波。濾波方法采用卡爾曼濾波,使用遞歸的思想來解決線性的濾波問題,只要獲得系統(tǒng)當前的測量值與前一個采樣周期的估計值,就可以開展狀態(tài)估計工作[4]。濾波結束后,測量系統(tǒng)開始尋找被測物,分別對2個網(wǎng)絡攝像機所拍攝的視頻流采用色域檢測法來尋找被測物的位置。程序中設定被測物的色域范圍,將被測物用矩形框框選出來,確定被測物的中心坐標,逐幀處理并記錄坐標的移動軌跡,進而繪制擺幅的范圍[5]。
3.2 終端樹莓派程序設計
在同一個網(wǎng)絡攝像機拍攝的視頻中,逐幀對比前后中心坐標的高度,直到發(fā)現(xiàn)被測物擺動到右側的最高位置,記錄坐標及當前時間t1,使用同樣的方法尋找被測物擺動到左側的最高位置,記錄坐標位置及當前時間t2。同理,對另一個網(wǎng)絡攝像機拍攝的視頻進行相同操作,記錄右側最高點坐標及時間t3,記錄左側最高點坐標及時間t4,結束后開始向終端樹莓派傳輸預處理后的數(shù)據(jù)信息。終端樹莓派C需要完成接收節(jié)點樹莓派發(fā)送的信息,并計算位于單擺運動中的繩長L與擺動角度θ等。
根據(jù)上一流程獲得物體在單擺運動中的擺動周期T=2(t2-t1)或T=2(t4-t3),根據(jù)單擺周期公式求出細繩長度。
根據(jù)節(jié)點樹莓派發(fā)送的數(shù)據(jù),整理出網(wǎng)絡攝像機在A方向拍攝的左側最高點坐標(Ax,Ay),通過θ=[arctan(Ax/Bx)×180]/π得到A方向上的角度。
4 硬件環(huán)境搭建
本設計的硬件實驗環(huán)境如圖2所示。以太網(wǎng)交換機、網(wǎng)絡攝像機與樹莓派之間組成一個局域網(wǎng),網(wǎng)絡攝像機上的信息可通過以太網(wǎng)交換機傳輸?shù)交ヂ?lián)網(wǎng)中,樹莓派可通過RTSP等協(xié)議接收網(wǎng)絡攝像機所拍攝到的視頻,便捷地在各類可以聯(lián)網(wǎng)的設備上獲取信息并進行分析。
5 系統(tǒng)測試
5.1 終端顯示
系統(tǒng)終端實際運行結果如圖3所示,可以實時顯示被測物運動狀態(tài),并用方框框選出被測物。
圖3中的數(shù)字“1 036.0,574.5”表示當前方框的中心坐標位置,數(shù)字“45”表示擺動角度,數(shù)字“85”表示懸掛被測物的細繩長度。該系統(tǒng)運行穩(wěn)定,符合設計要求。
5.2 長度測量
通過對繩長的測量,本系統(tǒng)測量的準確度較高。當角度分別控制在30°和90°時,長度測試誤差均在0.5~2.9 cm。實驗結果如表1、表2所示。
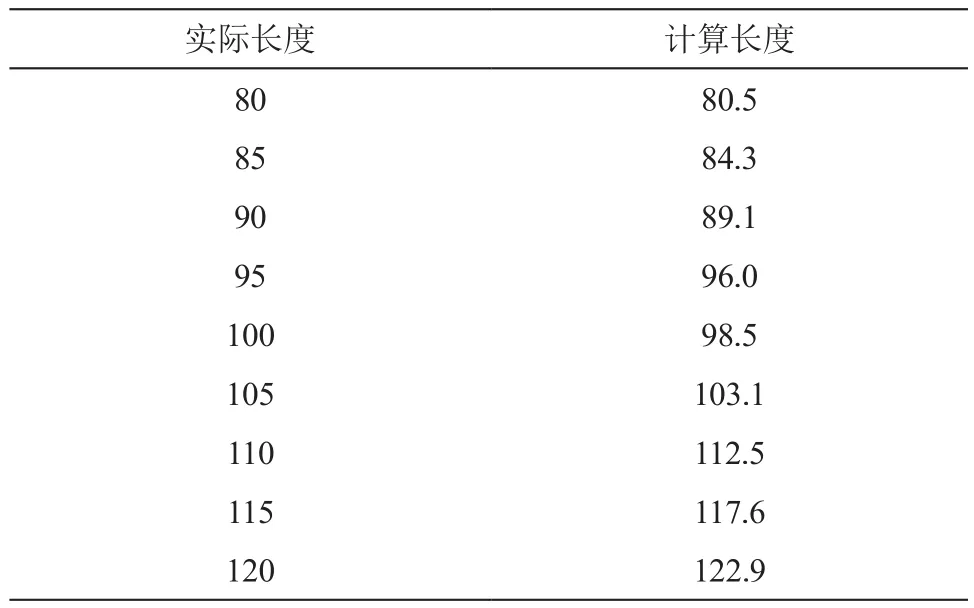
表1 被測物擺動角度為30°時的細繩長度測量結果 單位:cm
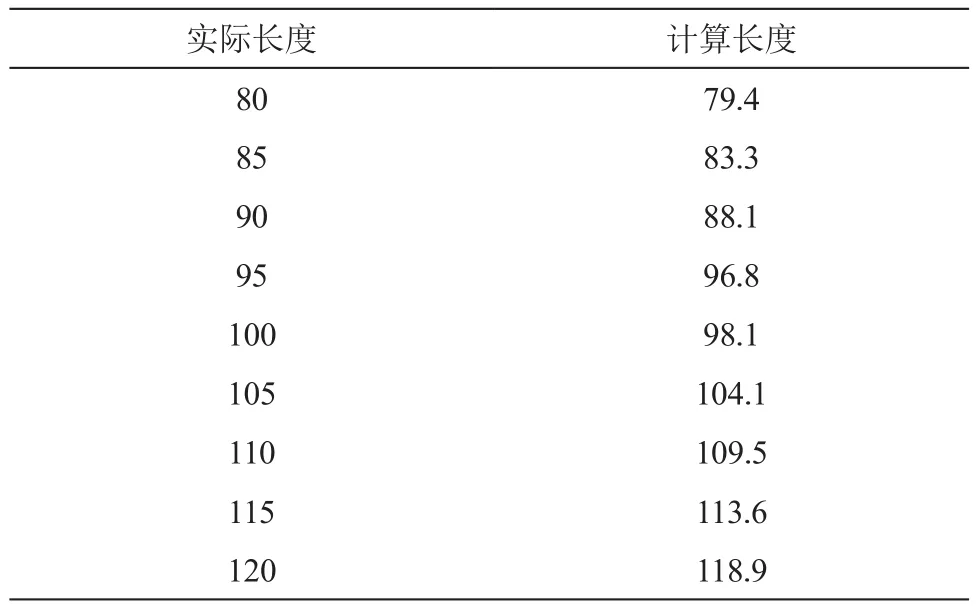
表2 被測物擺動角度為90°時的細繩長度測量結果 單位:cm
5.3 角度測量
當細繩長度控制在90 cm時,實驗結果如表3所示,被測物擺動角度測試誤差在0.6°~3.2°。
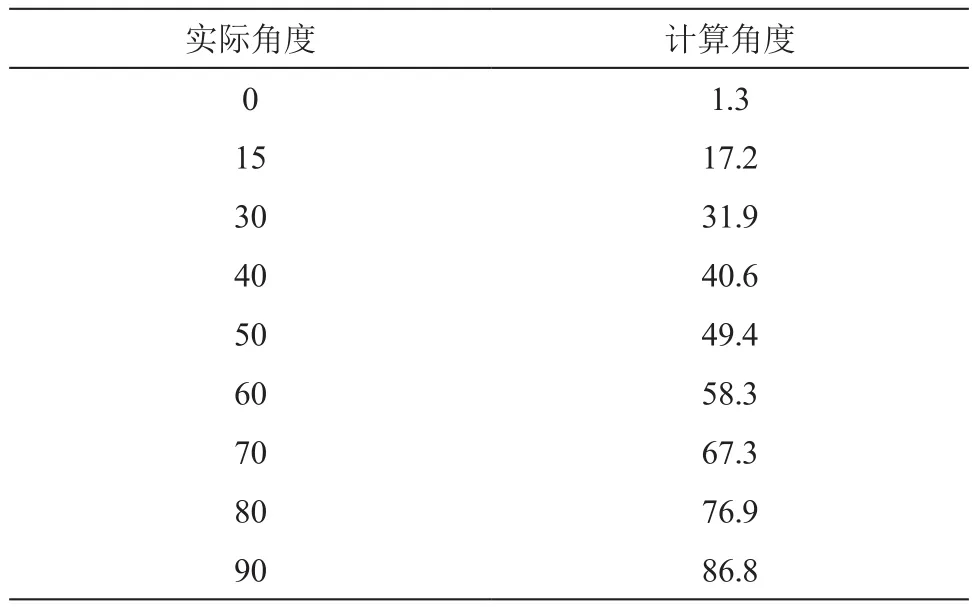
表3 被測物擺動角度測量結果 單位:(°)
通過對擺動角度的測量,本系統(tǒng)測量的準確度較高。
6 結 論
基于網(wǎng)絡攝像與互聯(lián)網(wǎng)技術的智能測量系統(tǒng)利用機器視覺的方法對處于單擺運動中的被測物實時追蹤,顯示并計算繩長與擺動角度,處理器采用樹莓派,性能穩(wěn)定且成本低。經(jīng)過實驗分析,這種對動態(tài)目標檢測的系統(tǒng)能夠滿足未來智能測量的需求,具有廣闊的發(fā)展前景。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
