基于Cohen-Sutherland編碼理論的光柵信號數字細分算法研究
2022-11-30 05:26:54王朝峰林江海
現代制造技術與裝備 2022年10期
王朝峰 張 玉 林江海
(山東省機械設計研究院,濟南 250031)
光柵是一種高精度測量儀器,被應用于高精度加工、檢查以及坐標方向測量。莫爾波紋是一種以光柵的相對移動為基礎的技術。因為該光柵的相對運動,傳輸光的光強會周期性改變。該光強信號被硅光單元轉換成具有周期變化的電子信號(正弦波),并在一組信號中進行一組處理,從而得到該光柵的相對位移。然而,單靠對其周期的估算遠遠無法達到準確的檢測要求。在計算機技術快速發展的今天,對莫爾條紋進行高階、高精度數字分割已經勢在必行。
數字化分割技術是一種新的、行之有效的方法,是目前國內外學者關注的一個熱點問題。當前,常用的數值劃分技術多采用軟件實現,如將“插值”與“四邊形”相結合,利用數學模型建立新的曲線方程式程[1-3],即純粹的硬件劃分[4-5]。然而,這些技術中的細分技術數目較小(通常是500以下)且線路較多,容易造成信號干擾,影響有效信號。由于資料的準確性下降,資料加工困難,很難達到較高的解析度。
文中使用計算機軟件中的“大號”和“細分小號”相結合的方法進行劃分[6]。在細分方面,利用分段運算和正余切功能,既能提高分辨能力,又能保持線性特性。該方法利用快速計時器芯片進行運算,而小數運算通過軟件的分解來實現。莫爾條帶循環可逆算,而小數計數法則是莫爾條帶細分的一個周期。本文以光柵微機上的軟件為對象,在此基礎上利用Cohen-Sutherland編碼原理對相位劃分進行詳細的分析[7-8]。
1 數字細分理論
光柵測試裝置是利用光柵法實現對輸入量(位移、角度等)進行變換和輸出的一體化測試裝置。光柵測光的基本原理是利用光柵對來自光源的光進行調制,把機械位移量轉化為光學信號,并將其轉化為可根據光線的調制而改變的交流電信號。通過不同的加工、轉換,可以對不同的力學、形位進行對應的檢測。在測定長度時,光柵是以間隔W為單位的編碼標尺。如圖1所示,編碼標尺的同時,利用光柵作為基準進行對比和測定,可以從被測物體上讀出X,表達式為

圖1 光柵精密測量定位原理

式中:N為AB間的光格計數;δ、δ1、δ2分別為在AB兩端對應的光格上讀取劃分的小數值。
可見,柵格的測量本質上是相應的格線N個數和少于節距的點數的總和。
如果測量精度允許對十進制值進行四舍五入,則可將方程式簡化為

因此,光柵長度可以通過簡單地讀取光柵柵線的數量N獲得。
如果測量精度不允許四舍五入到十進制值,則必須細分光柵間距。假設可以將間距細分為n個相等的部分,則柵格細分的分辨率為

此時,測得的小數部分為

式中:m=0,1,2,…,n。
將式(3)和式(4)代入到式(1),并令M=N·n+m,則

從而得到測量單位最小的系統方程。
實踐中,若以柵格角度或柵格角度為單位,僅可求出整列間隔,其數值精確性遠低于以上所提需求。為了達到要求的精確度,選取合適的柵格間隔進行劃分,然后通過對間隔的劃分獲取最低的讀出值來提高設備的解析度。需要說明的是,細分是指一條莫爾帶上的多條測量脈沖。
在傳統技術中,常采用細分法進行測量。該方法具有簡便、信號要求低的特點,適用于靜、動兩種不同的測量方式,但劃分數目較少。移位電阻鏈法是一種比較精細的測量方法,但是電路比較煩瑣,信號的正交性很強,且測量的準確率受到零漂的限制。振幅分裂電阻鏈方法具有精確性好的優勢,不會受到信號的幅值和振幅的影響,可以實現動靜兩方面檢測,但是線路比較煩瑣。鎖相細分法具有細分數量大、電路簡單以及信號不嚴謹等優點,只適用于動態檢測,但均勻性好,光柵運動高。載波法具有較大的細分能力和較高的準確率,但是線路比較煩瑣,同時其波形學和正交度比較高。
從上述結果可以看到,在需要進行大規模劃分時,若采用硬體劃分,將會造成較大的困難,并不適合于單純的硬件實施。莫爾條形碼的劃分是利用計算機程序對其進行劃分,再利用程序劃分,即利用采集與儲存的資料將莫爾條紋的兩個相位為90°的脈沖輸出信號進行數字化處理,并進行多次波形和數碼展示。利用計算機軟件細分,可以使裝置的硬件結構更加簡單,降低線路對有效信號的干擾,加強裝置的性能,改善裝置的準確度。
2 數字細分算法
如圖2所示,莫爾條帶在理論上并非正弦脈動,而在槽寬為W/2(也就是代表光柵的光透過部)和空隙為0時得到三角波形。然而,在現實的構造中,光柵的信號會改變。光束的不均勻性和光的衍射效應,光罩面間光的反射,光柵光罩的凹凸不平等,均會改變光柵信號,變化曲線接近圖3。
從圖3可以看出,在出相與暗相的光發射端,一個正弦波的信號被光器件生成。從圖2可以看出,按照光電變換的原則,光學信號被變換成電信號,此時仍然是正弦信號,可以用一個正弦波來代表

圖2 光柵理想信號

式中:U為光電元件輸出信號;W為光柵柵距;X為位移;Up-p為信號峰值;Ucp為直流電平。
與圖3相似,在光器件收到明暗色的正弦信號后,按照光電變換的原則,把該光學信號變換成電信號仍然是正弦波,也可以由式(6)來表達這個正弦波。

圖3 光柵實際信號
通過計算、區分、細分和小數計數等全周期,采用相角偏差90°的正弦型和余弦型進行測量。在幅度調節時,真實的信號U的幅度會隨著電源波動、光強度和光柵間距而變化。但是,由于氣溫等環境因素的作用,系統無法獲得精確的變形信息。
分析表明,當兩路莫爾條紋的振幅改變相同時,振幅U的波動效應可以用莫爾條帶的正弦和余弦比例來抵消,即這里U為振幅,θ為相位角度,由此確定位移。
在兩個莫爾條帶的幅度改變相同的條件下,可以用莫爾條帶的正弦與余弦之比排除幅度U起伏的效應,并隱藏一定的位移量。這樣可以根據得到的數值獲得相位角,進而得到相應的位移量。
以sin光柵信號與cos柵極信號的過零及其絕對等效處為界,將一柵格循環劃分為8個具有相位角度的區,并將8個區的基礎設為0、100、200、300、400、500、600以及700(此處是800個劃分實例,實踐中如果有必要,可以在該方案中增加劃分倍數),見圖4[9]。
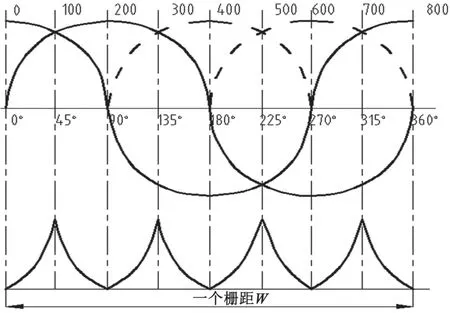
圖4 細分原理圖
利用以上劃分原則,將一個周期(0°~360°)的正弦波信號劃分為8個區間,各分區使用三位二值碼,右側為首位[7]。假設每一次獲得的兩個測量信號的數值是Usin、Ucos,編碼規則為:若Usin>0,則第1位置1,否則為0;若Ucos>0,則第2位置1,否則為0;若|Usin|-|Ucos|>0,則第3位置1,否則為0。
根據該編碼規律,可以方便地求出各基元的編碼數值,方法如表1所示。

表1 區域外碼
相位角分成8個區域后,由三角函數圖像和性質可以得到區域外碼判別的方法,如表2所示。外碼中的每一位被置成1(真)或0(假),就能得到對應區域三位二進制代碼。

表2 區域基數與外碼對應表
由編碼規則很容易得到每個基數對應的編碼值。基于Cohen-Sutherland編碼理論的相位角區域編碼算法具體步驟如下。
步驟1:定義一個含有4個成員變量的類CCode,成員變量為all、sin、cos、sc。
步驟2:完成編碼。
步驟2-1:初始化CCode對象的成員變量all、sin、cos、sc分別為0;
步驟2-2:獲取測量信號值Usin、Ucos;
步驟2-3:如果Usin>0,sin=1,否則sin=0;
步驟2-4:all+=sin;
步驟2-5:如果Ucos>0,cos=1,否則cos=0;
步驟2-6:all+=cos;
步驟2-7:如果|Usin|-|Ucos|>0,sc=1,否則sc=0;
步驟2-8:all+=sc。
步驟3:輸出編碼結果。
以表1中的區外代碼為基礎,識別獲取的數據,即尋找一個地區基礎數值,然后把該地區的基礎值和各分區的分區進行綜合,將一個循環的800次分割開來。對于在任意i上的一個信號數值,相應于這個位置的一個小的數值Xi為


按下列方式運行算法,計算每次獲取測量信號的外碼,由循環語句判斷該外碼值對應的區域基數。同時,根據外碼值的奇偶性,決定調用式(8)或式(9)計算對應區域的細分值。信號處理流程如圖5所示。

圖5 光柵信號處理流程
3 結語
從理論上研究了測量柵格的技術原理,提出了莫爾條紋細分算法。通過對通用齒形測試儀的實際使用,證明了所提方法可以對800個光柵格進行分割,50根/毫米的光柵解析儀的分辨率超過0.025 μm,具有較好的轉化效率。與傳統的硬件細分方法比較,它的精度可以達到1~2個百分點。試驗結果表明,該控制方案性能良好,工作性能穩定,并有較好的抗噪聲性能和很強的靈活性,能夠根據實際需求和計算機軟件實現精確劃分。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00