機(jī)載LiDAR測量系統(tǒng)在“房地一體”農(nóng)村不動產(chǎn)權(quán)籍調(diào)查中的應(yīng)用
2022-11-29 09:19:26謝秀媛
資源導(dǎo)刊(信息化測繪) 2022年9期
謝秀媛
(廣東泊銳數(shù)創(chuàng)空間有限公司,廣東 惠州 516006)
1 引言
傳統(tǒng)的房地測量方式作業(yè)周期長、外業(yè)強(qiáng)度大[1]、人員投入密集,工作進(jìn)展易受外界因素影響,且傳統(tǒng)作業(yè)模式生產(chǎn)的數(shù)據(jù)成果為二維形式,難以對三維空間不動產(chǎn)信息進(jìn)行精細(xì)化、準(zhǔn)確化、直觀化管理。將機(jī)載LiDAR 測量系統(tǒng)應(yīng)用到“房地一體”農(nóng)村不動產(chǎn)權(quán)籍調(diào)查項(xiàng)目中,既可以直接基于三維模型采集內(nèi)業(yè)數(shù)據(jù),又可使用直觀的三維底圖開展外業(yè)權(quán)屬調(diào)查,能夠?yàn)椤胺康匾惑w”農(nóng)村不動產(chǎn)權(quán)籍調(diào)查項(xiàng)目提供高效、便捷的作業(yè)模式。
2 機(jī)載LiDAR 測量系統(tǒng)
2.1 機(jī)載LiDAR 測量系統(tǒng)原理
機(jī)載LiDAR 測量系統(tǒng)由空中測量平臺、激光掃描儀、全景相機(jī)(CCD)、衛(wèi)星/慣性導(dǎo)航系統(tǒng)(GNSS/INS)、同步存儲控制系統(tǒng)等組成(如圖1 所示),空中測量平臺以中低空飛行器為主,常用的有固定翼飛機(jī)、無人機(jī)和直升機(jī)等。機(jī)載激光掃描儀與地面三維激光掃描儀相似,其通過高速激光掃描測量的方法,按照激光測距的原理,獲取被測物體表面大量密集點(diǎn)云數(shù)據(jù)和反射率等屬性數(shù)據(jù)和信息[2]。

圖1 機(jī)載LiDAR測量系統(tǒng)作業(yè)示意圖
機(jī)載LiDAR 測量系統(tǒng)的原理為:系統(tǒng)通過同步控制各個組件獲取定位信息,同時進(jìn)行數(shù)據(jù)采集,其中,GNSS 系統(tǒng)可以快速獲取瞬時位置信息,INS 系統(tǒng)可以獲取瞬時的姿態(tài)及速度信息,利用GNSS 地面基站、移動GNSS、INS 系統(tǒng)、精密數(shù)據(jù)處理軟件,聯(lián)合進(jìn)行POS 解算,可生成高精度的位置及速度信息[3]。機(jī)載LiDAR 測量系統(tǒng)通過對地面目標(biāo)主動發(fā)射高頻率的激光脈沖,直接獲取目標(biāo)物體表面的距離、坡度、粗糙度和反射率等信息,高精度POS 軌跡結(jié)合激光數(shù)據(jù)可生成帶有絕對坐標(biāo)的激光點(diǎn)云成果[4];同時,CCD 系統(tǒng)獲得的影像數(shù)據(jù)經(jīng)過POS 處理后,影像帶有絕對坐標(biāo),將其RGB 屬性信息賦值到區(qū)域內(nèi)的激光點(diǎn)云中,即可得到真實(shí)色彩的點(diǎn)云數(shù)據(jù)成果,基于這些數(shù)據(jù)信息即可快速重建出被測區(qū)域內(nèi)的三維模型及各種圖件數(shù)據(jù)。
2.2 機(jī)載LiDAR 測量系統(tǒng)應(yīng)用優(yōu)勢
機(jī)載LiDAR 測量系統(tǒng)作為一種新興的測繪技術(shù),具有較大的應(yīng)用優(yōu)勢。
(1)主動式探測,制約因素少
通過主動發(fā)射激光脈沖,獲取探測目標(biāo)反射回來的信號,并處理得到地面目標(biāo)的空間信息,具有不受天氣、光照等條件制約的優(yōu)勢。
(2)獲取空間信息速度快、效率高,作業(yè)安全
通過飛行器的飛行和激光脈沖的掃描完成探測工作,在短時間內(nèi)獲取大區(qū)域、大范圍的地表空間信息,工作效率較高。利用無人機(jī)等飛行器進(jìn)行探測,可以對危險區(qū)域進(jìn)行作業(yè),作業(yè)安全得到保障。
(3)對植被具有一定的穿透作用
機(jī)載LiDAR 測量系統(tǒng)發(fā)射的激光脈沖信號對植被具有一定的穿透能力[5],可以在一定程度上減少植被遮擋等造成的信息損失,獲取真實(shí)的地形數(shù)據(jù)。
(4)精度高
機(jī)載LiDAR 測量系統(tǒng)能夠快速獲取大范圍地面物體的空間坐標(biāo),且獲取的坐標(biāo)具有較高的精度,在1km 的飛行高度下,獲取的點(diǎn)云數(shù)據(jù)平面精度可以達(dá)到0.1 ~0.5m,高程精度能夠達(dá)到分米級精度。
(5)提供的信息豐富
機(jī)載LiDAR 測量系統(tǒng)不僅能夠解算地面物體的三維空間坐標(biāo),同時可以記錄地面目標(biāo)的強(qiáng)度信息[6],部分LiDAR 系統(tǒng)還能夠記錄回波次數(shù)信息,豐富的信息為LiDAR 數(shù)據(jù)的使用提供了更多的可能性。
3 工程實(shí)例
3.1 工程概況
某“房地一體”農(nóng)村不動產(chǎn)權(quán)籍調(diào)查項(xiàng)目需進(jìn)行不動產(chǎn)權(quán)籍調(diào)查測繪工作。測區(qū)位于惠州市郊某鎮(zhèn),以丘陵地貌為主,地勢復(fù)雜、植被茂密、交通不便,高程在75 ~105m 之間,面積約14.4km2。考慮到應(yīng)用常規(guī)測量方法難度較大,因此使用無人機(jī)載LiDAR 測量系統(tǒng)進(jìn)行作業(yè)。
3.2 數(shù)據(jù)獲取
采用華測P580 無人機(jī)平臺搭載AS-300HL 多平臺激光雷達(dá)測量系統(tǒng),獲取目標(biāo)區(qū)域內(nèi)激光點(diǎn)云及影像數(shù)據(jù)。AS-300HL 多平臺激光雷達(dá)測量系統(tǒng)集成了激光掃描系統(tǒng)、定位定姿系統(tǒng)(包括全球定位系統(tǒng)GNSS 和慣性導(dǎo)航儀IMU)、控制單元。系統(tǒng)輕量化設(shè)計,重量3.2kg,數(shù)據(jù)采集速度達(dá)10 萬點(diǎn)/秒,其設(shè)計最大測距250m、測量精度15mm、重復(fù)精度為10mm。
參照測區(qū)地形地貌及建筑物、植被覆蓋等情況,結(jié)合機(jī)載LiDAR 測量系統(tǒng)的特點(diǎn),在保證安全飛行的前提下,制定本次任務(wù)的飛行路線規(guī)劃圖(如圖2 所示)和飛行參數(shù)。設(shè)計相對起飛點(diǎn)航高為120m、飛行速度為7.5m/s、航向間距60m,共設(shè)計30 條水平航帶和2條垂直航帶。結(jié)合空域及天氣因素,共飛行兩個架次,完成了測區(qū)的全部數(shù)據(jù)采集任務(wù),總飛行用時為4 小時58 分。數(shù)據(jù)采集完成后,點(diǎn)云數(shù)據(jù)量為35.66GB,獲取影像共5998 張,對數(shù)據(jù)進(jìn)行完整性檢查,確保采集數(shù)據(jù)完全覆蓋測區(qū)、無大面積遺漏。
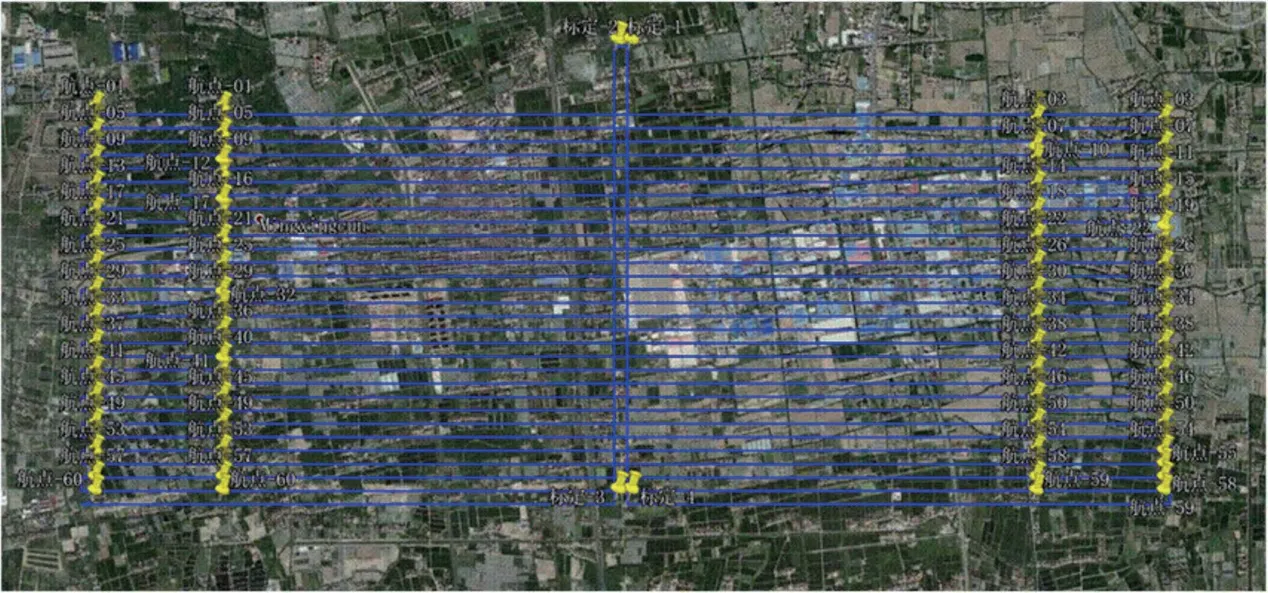
圖2 飛行路線規(guī)劃圖
3.3 數(shù)據(jù)處理
數(shù)據(jù)處理主要有POS 數(shù)據(jù)解算、點(diǎn)云數(shù)據(jù)融合、數(shù)據(jù)采集、調(diào)繪與地籍圖編繪四個步驟。
(1)POS 數(shù)據(jù)解算
運(yùn)用GPS 差分及慣性定位后處理軟件進(jìn)行PPK 后差分解算POS 數(shù)據(jù),POS 解算采用基站數(shù)據(jù)和移動站GPS 數(shù)據(jù)和IMU 數(shù)據(jù)進(jìn)行組合解算,并輸出點(diǎn)云融合階段需要使用的高精度定位定姿數(shù)據(jù)。POS 解算操作主要包括基站數(shù)據(jù)預(yù)處理和軌跡解算兩部分,將基站原始數(shù)據(jù)轉(zhuǎn)換為相應(yīng)格式,然后將移動站的數(shù)據(jù)與處理之后的基站數(shù)據(jù)進(jìn)行組合解算,得到高精度定位定姿數(shù)據(jù)和航線軌跡,同時導(dǎo)出高精度相機(jī)照片的外方位元素。
(2)點(diǎn)云數(shù)據(jù)融合
將解算后的POS 定位定姿數(shù)據(jù)與掃描儀原始數(shù)據(jù)經(jīng)時間同步后,生成帶有絕對坐標(biāo)的點(diǎn)云數(shù)據(jù),融合后的點(diǎn)云數(shù)據(jù)是后續(xù)數(shù)據(jù)采集測圖的基礎(chǔ)。圖3 為通過解算并且上色融合后得到的點(diǎn)云數(shù)據(jù)成果,經(jīng)處理后得到的點(diǎn)云密度約為750 pt/m2。
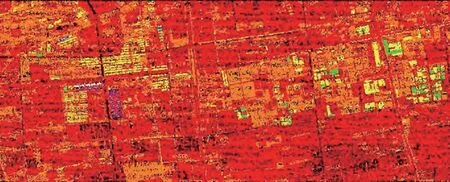
圖3 點(diǎn)云數(shù)據(jù)成果
(3)數(shù)據(jù)采集
數(shù)據(jù)采集基于三維立體環(huán)境下進(jìn)行測圖,同步加載點(diǎn)云數(shù)據(jù)、正射影像數(shù)據(jù),按照先整體后局部的原則,通過二三維窗口聯(lián)動進(jìn)行地物采集。由于機(jī)載點(diǎn)云數(shù)據(jù)密度有限,考慮點(diǎn)云數(shù)據(jù)不能夠準(zhǔn)確覆蓋所有建筑物角點(diǎn)位置成果,對于建筑物使用打點(diǎn)交會法進(jìn)行采集,在建筑物底部墻面上以三點(diǎn)確定一條直線,兩點(diǎn)連線另外一點(diǎn)作為檢核,與臨面線相交確定建筑物腳點(diǎn)位置[7]。此方法能精確地按照點(diǎn)云成果進(jìn)行制圖,避免產(chǎn)生較大誤差。對于地形和一些線狀地物采集,使用DOM 輔助點(diǎn)云數(shù)據(jù)進(jìn)行。對于高程數(shù)據(jù),在三維模型上通過賦點(diǎn)的方式可獲取相應(yīng)位置的高程坐標(biāo)值。
(4)調(diào)繪與地籍圖編繪
點(diǎn)云數(shù)據(jù)采集完成后獲得地籍圖初步成果,進(jìn)行外業(yè)綜合補(bǔ)測與調(diào)繪,調(diào)繪前對通過點(diǎn)云采集得到的矢量數(shù)據(jù)進(jìn)行檢查,使用直觀的三維模型底圖進(jìn)行外業(yè)權(quán)屬調(diào)查。調(diào)繪完成后再進(jìn)行內(nèi)業(yè)數(shù)據(jù)編輯,添加屬性數(shù)據(jù)即完成地籍圖的編繪整飾工作。圖4 為經(jīng)過外業(yè)調(diào)繪與內(nèi)業(yè)數(shù)據(jù)編輯的部分測區(qū)1∶1000地籍圖。
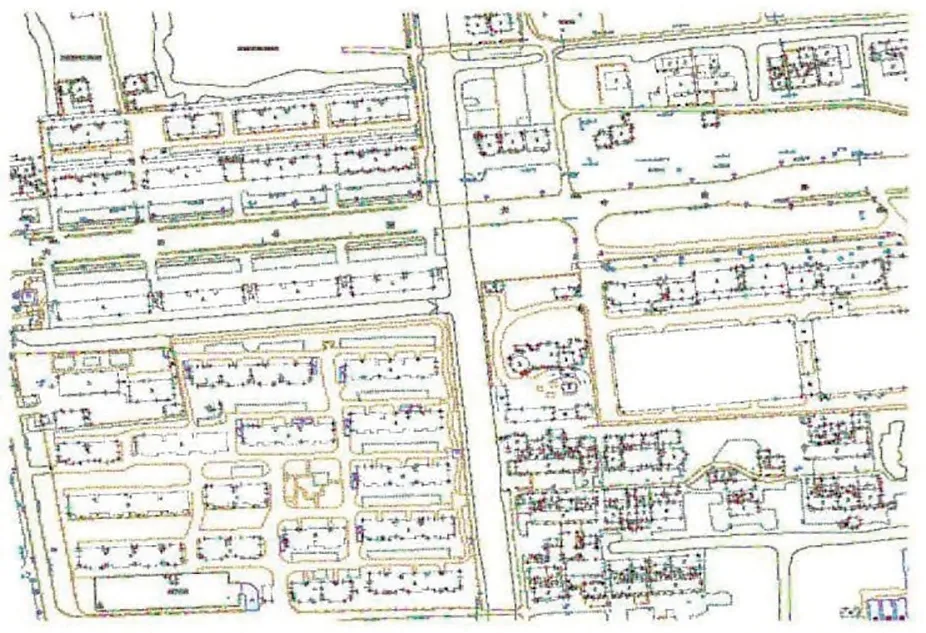
圖4 部分測區(qū)地籍圖
3.4 精度統(tǒng)計
以中誤差作為精度指標(biāo)對機(jī)載LiDAR 測量系統(tǒng)采集的點(diǎn)云數(shù)據(jù)質(zhì)量進(jìn)行分析評價,在測區(qū)范圍內(nèi)均勻選取一些特征點(diǎn),如房屋角點(diǎn)、圍墻拐點(diǎn)、地面標(biāo)示線或井蓋中心,使用GNSS-RTK 和全站儀采集特征點(diǎn)的平面坐標(biāo)和高程,將實(shí)測的坐標(biāo)數(shù)據(jù)與從點(diǎn)云數(shù)據(jù)中量測的坐標(biāo)進(jìn)行比對。本項(xiàng)目共選取100 個特征點(diǎn)進(jìn)行檢測,統(tǒng)計結(jié)果如表1 所示。
通過表1 的數(shù)據(jù)統(tǒng)計得出,利用機(jī)載LiDAR 測量系統(tǒng)采集的點(diǎn)云數(shù)據(jù)的平面中誤差為±3.63 cm,高程中誤差為±4.49 cm,能夠滿足《地籍測量規(guī)范》(CH 5002-94)中的二級界址點(diǎn)的精度要求。
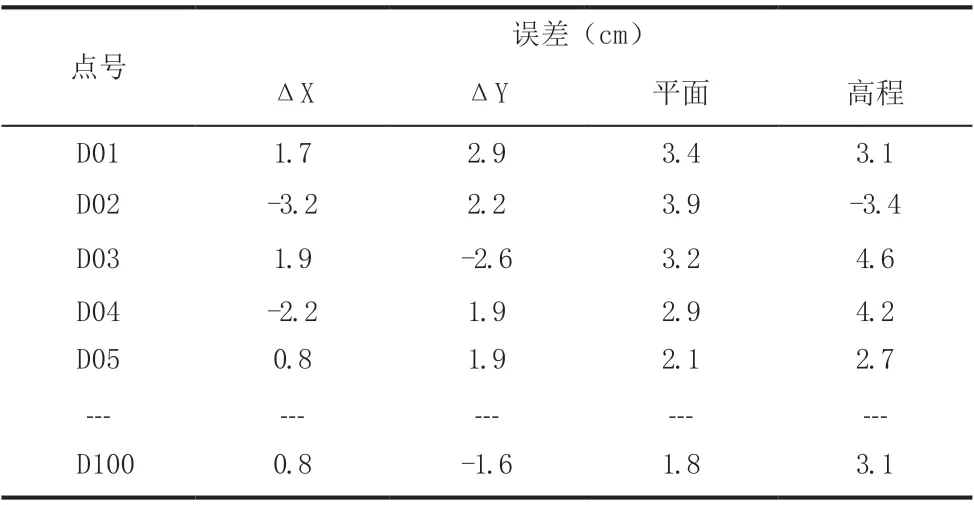
表1 點(diǎn)云數(shù)據(jù)精度統(tǒng)計
3.5 效率統(tǒng)計
利用機(jī)載LiDAR 測量系統(tǒng)完成本次不動產(chǎn)權(quán)籍調(diào)查測繪工作后,將其與傳統(tǒng)測繪方法進(jìn)行了效率比較,結(jié)果如表2 所示。
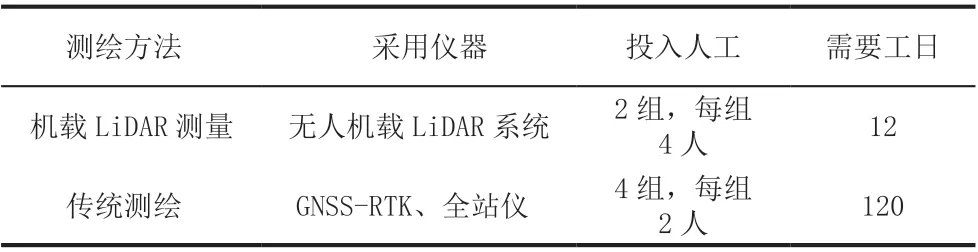
表2 生產(chǎn)效率統(tǒng)計
從表2 可以看出,機(jī)載LiDAR 測量系統(tǒng)的生產(chǎn)效率比傳統(tǒng)測繪方法提高了10 倍以上,應(yīng)用效果顯著。
4 結(jié)束語
基于機(jī)載LiDAR 測量系統(tǒng)開展“房地一體”農(nóng)村不動產(chǎn)權(quán)籍調(diào)查,有效提高了測繪內(nèi)外業(yè)的工作效率和成圖質(zhì)量,且成果精度完全符合相關(guān)規(guī)范的要求。隨著LiDAR 設(shè)備越來越小型化,其搭載的載體將會更加豐富。基于多平臺的LiDAR 測量系統(tǒng)都已面世[8],隨著新型基礎(chǔ)測繪的開展,LiDAR 測量系統(tǒng)將在全要素測繪生產(chǎn)中大展身手,具有廣闊的應(yīng)用前景。
猜你喜歡
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
中華手工(2017年2期)2017-06-06 23:00:31
電子制作(2017年9期)2017-04-17 03:01:00
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
