機(jī)載激光雷達(dá)1∶500地形圖測(cè)繪理論與實(shí)踐
2022-11-25 06:20:20尚海興賀春林張西龍
西北水電 2022年5期
關(guān)鍵詞:測(cè)繪
張 釗,周 偉,尚海興,賀春林,張西龍
(1. 中國(guó)電建集團(tuán)西北勘測(cè)設(shè)計(jì)研究院有限公司, 西安 710065;2. 國(guó)家能源集團(tuán)西藏電力有限公司,西藏 林芝 860019)
0 前 言
1∶500地形圖精度要求高,測(cè)圖時(shí)需獲取地面精準(zhǔn)高程信息。常規(guī)光學(xué)相機(jī)無(wú)人機(jī)航攝系統(tǒng)在大比例尺地形圖測(cè)繪項(xiàng)目中廣泛應(yīng)用,但面對(duì)植被密度大、覆蓋厚的地區(qū)時(shí),相機(jī)難以獲取植被覆蓋層下真實(shí)的地面高程數(shù)據(jù)[1];且受相機(jī)畸變及影像質(zhì)量等因素影響,要保證高程精度,在空中三角測(cè)量計(jì)算時(shí)需要一定數(shù)量像控點(diǎn)參與其中。姜華提出可以使用消費(fèi)級(jí)無(wú)人機(jī)進(jìn)行1∶500地形圖制作,但對(duì)像控點(diǎn)仍有一定需求[2];朱巖隆、朱曉康等采用光學(xué)航攝儀無(wú)人機(jī)系統(tǒng)免像控生產(chǎn)1∶500地形圖[3-4];李國(guó)峰探討了免像控?zé)o人機(jī)航測(cè)技術(shù)在1∶500地形圖測(cè)繪中的應(yīng)用,但在植被茂密地區(qū)應(yīng)進(jìn)行人工補(bǔ)測(cè)[5];趙立根提出固定翼無(wú)人機(jī)傾斜攝影可在用于1∶500地形圖測(cè)繪,但該方法對(duì)影像質(zhì)量要求高且在植被覆蓋區(qū)域精度難以保障[6]。綜上所述,植被覆蓋區(qū)免像控測(cè)制1∶500地形圖的解決方案較少。本文以平地、丘陵、山地3種不同地形的光伏測(cè)繪項(xiàng)目為例,介紹機(jī)載激光雷達(dá)(以下簡(jiǎn)稱LiDAR)在1∶500地形圖測(cè)制中的作業(yè)流程和相關(guān)經(jīng)驗(yàn),檢查地形圖成果的精度,分析在植被覆蓋區(qū)機(jī)載激光雷達(dá)技術(shù)較傳統(tǒng)光學(xué)影像航測(cè)技術(shù)的優(yōu)勢(shì)。
1 技術(shù)工作原理及作業(yè)流程
1.1 航測(cè)關(guān)鍵參數(shù)計(jì)算
根據(jù)測(cè)繪行業(yè)標(biāo)準(zhǔn),LiDAR測(cè)量1∶500地形圖時(shí)點(diǎn)云密度應(yīng)大于16點(diǎn)/m2,即點(diǎn)云航向和旁向點(diǎn)間距均應(yīng)小于0.25 m;預(yù)設(shè)地面分辨率小于0.05 m,航攝影像重疊度為20%~ 30%,LiDAR點(diǎn)云獲取重疊度至少為20%[7-12]。
LiDAR參數(shù)和航攝儀參數(shù)在航線設(shè)計(jì)時(shí)聯(lián)動(dòng),一般在確定航攝儀重疊度后計(jì)算航線間距,再使用航線間距計(jì)算出激光LiDAR點(diǎn)云重疊度,最終機(jī)載LiDAR與光學(xué)航攝儀同時(shí)工作時(shí)使重疊度均滿足規(guī)范要求且航線間距最大。在計(jì)算重疊度時(shí),與平坦地形不同的是山地或地面傾角過(guò)大區(qū)域需加入地面傾角參數(shù),以保證最高點(diǎn)重疊度滿足要求。預(yù)設(shè)航攝儀旁向重疊度后,滿足要求的航線間距計(jì)算式可表示為:
(1)
LiDAR掃描寬度為
(2)
計(jì)算出滿足要求的LiDAR點(diǎn)云旁向重疊度計(jì)算式為
(3)
(4)
公式(1)~(4)中:D為航線間距,m;F為航攝儀畫(huà)幅寬度,mm;h為無(wú)人機(jī)相對(duì)航高,m;f為航攝儀主距,mm;Pc為航攝儀旁向重疊度,%;Ll為L(zhǎng)iDAR掃描寬度,m;Rmax為L(zhǎng)iDAR最大測(cè)量距離,m;Pl為L(zhǎng)iDAR點(diǎn)云旁向重疊度,%。
兼顧LiDAR最大測(cè)量距離和擬采集的點(diǎn)云密度2種參數(shù)選擇掃描頻率,并計(jì)算無(wú)人機(jī)相對(duì)航高;根據(jù)預(yù)設(shè)的影像航向重疊度、LiDAR點(diǎn)云航向間距、無(wú)人機(jī)飛行速度計(jì)算LiDAR工作線速。
1.2 原始數(shù)據(jù)獲取及其注意事項(xiàng)
(1) 無(wú)人機(jī)機(jī)載LiDAR系統(tǒng)集成了無(wú)人機(jī)平臺(tái)、GNSS、慣性導(dǎo)航系統(tǒng)(INS)、激光掃描儀(scanner)和數(shù)碼相機(jī)等設(shè)備。其中,定姿定位系統(tǒng)(POS)獲取差分基準(zhǔn)站數(shù)據(jù)、差分流動(dòng)站數(shù)據(jù)、星歷數(shù)據(jù)、慣性導(dǎo)航數(shù)據(jù);LiDAR系統(tǒng)中的scanner獲取LiDAR點(diǎn)云數(shù)據(jù),光學(xué)航攝儀獲取光學(xué)影像數(shù)據(jù)及通過(guò)檢校后得到航攝儀檢校參數(shù)。無(wú)人機(jī)機(jī)載LiDAR各系統(tǒng)獲取數(shù)據(jù)類(lèi)型見(jiàn)圖1。
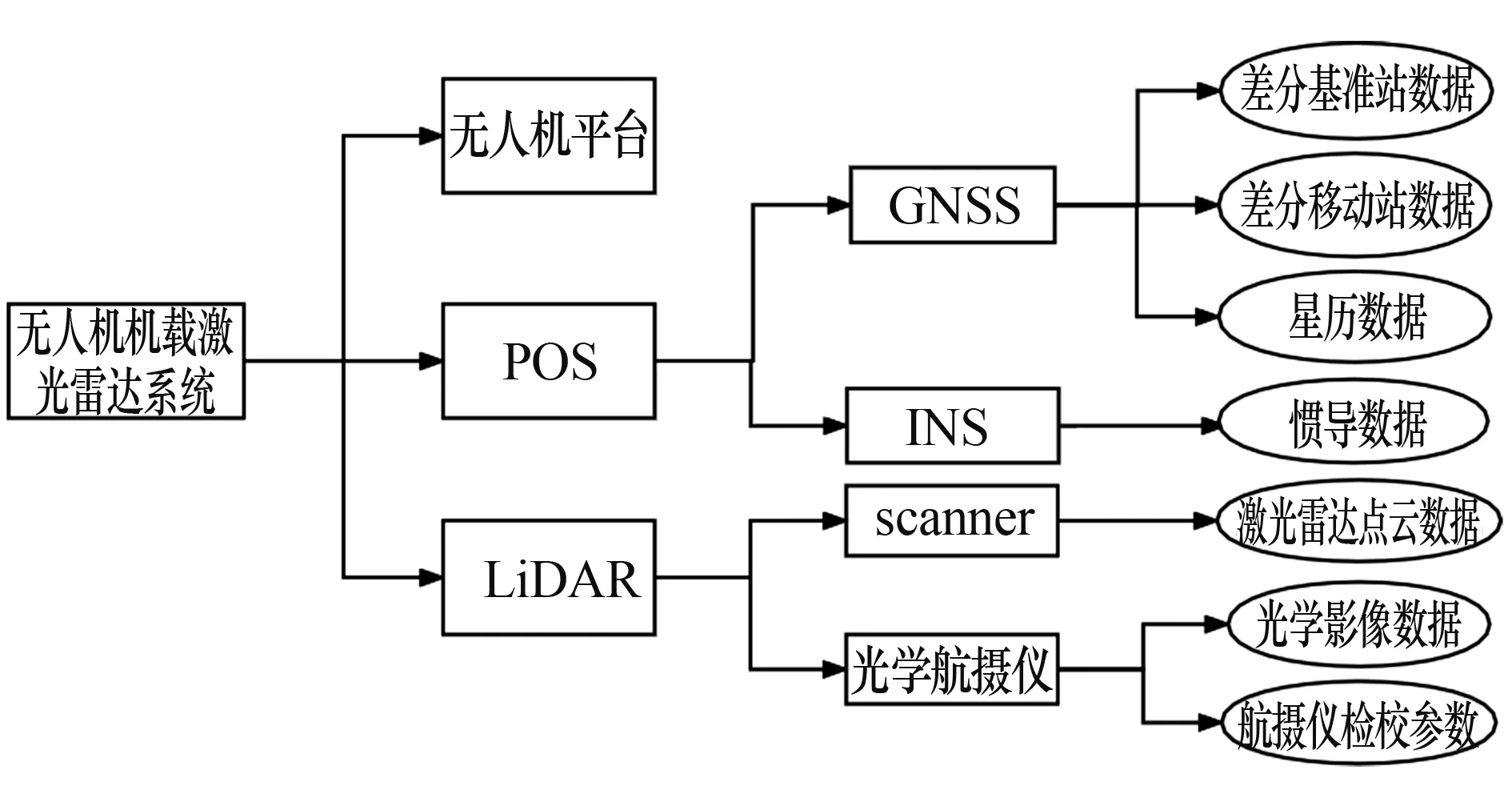
圖1 機(jī)載LiDAR各系統(tǒng)組成及獲取數(shù)據(jù)類(lèi)型
(2) 航測(cè)作業(yè)前,一般先將GNSS差分基準(zhǔn)站架設(shè)在開(kāi)闊的已知控制點(diǎn)上,盡量保證該控制點(diǎn)擁有與IGS站聯(lián)測(cè)的經(jīng)緯度及大地高。架設(shè)的控制點(diǎn)距本架次有效航攝區(qū)域最遠(yuǎn)處一般不超過(guò)5 km,且開(kāi)關(guān)機(jī)應(yīng)分別早于和晚于無(wú)人機(jī)POS系統(tǒng)10 min進(jìn)行[13]。
(3) 航測(cè)作業(yè)時(shí),每次開(kāi)機(jī)后使LiDAR系統(tǒng)在開(kāi)闊區(qū)域靜置等待3~5 min,此時(shí)POS系統(tǒng)進(jìn)行初始化改正并鎖定衛(wèi)星,作業(yè)結(jié)束后按同樣方法靜止。無(wú)人機(jī)起飛后,手動(dòng)控制無(wú)人機(jī)或按預(yù)設(shè)航線進(jìn)行“8”字繞飛,以激活I(lǐng)NS中的陀螺儀,加速慣導(dǎo)收斂并使其找北方向。為控制慣導(dǎo)偏移,一般規(guī)劃航線時(shí)還需考慮直線段距離應(yīng)在一定范圍內(nèi)[14]。
1.3 數(shù)據(jù)處理及其注意事項(xiàng)
(1) 處理數(shù)據(jù)時(shí),先將慣導(dǎo)數(shù)據(jù)、機(jī)載差分?jǐn)?shù)據(jù)、差分基準(zhǔn)站數(shù)據(jù)、公開(kāi)的星歷數(shù)據(jù)等整理后再加入設(shè)備自身的偏心改正值計(jì)算得出軌跡文件及精準(zhǔn)POS數(shù)據(jù)(緯度B、經(jīng)度L、橢球高H、航向角Kappa/Heading、 俯仰角Omega/Pitch、滾轉(zhuǎn)角Phi/Roll等)。解算時(shí),需檢查GNSS差分解是否固定,PDOP值、周跳等是否合格,各參數(shù)滿足要求后方可使用。LiDAR系統(tǒng)中POS解算一般優(yōu)先使用計(jì)算精度更高的緊耦合解算方式。緊耦合原理如圖2所示。
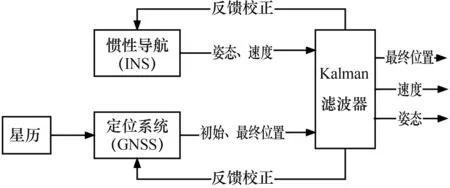
圖2 緊耦合原理
(2) 因重疊度的設(shè)置,相鄰航帶間同名點(diǎn)會(huì)出現(xiàn)三維偏移現(xiàn)象[15],LiDAR掃描的點(diǎn)云誤差會(huì)隨掃描角度增大而增大,一般小開(kāi)角掃描到的點(diǎn)云精度大于大開(kāi)角。預(yù)處理數(shù)據(jù)時(shí)一般據(jù)此理論進(jìn)行航帶拼接處理。
(3) 在實(shí)際環(huán)境中和設(shè)備的干擾影響下,生產(chǎn)的點(diǎn)云不可避免會(huì)存在一定數(shù)量的噪聲點(diǎn)。此時(shí)需對(duì)噪聲點(diǎn)數(shù)據(jù)進(jìn)行消除,避免其在點(diǎn)云分類(lèi)時(shí)對(duì)計(jì)算造成影響從而出現(xiàn)分類(lèi)錯(cuò)誤的情況。
(4) 人機(jī)交互的進(jìn)行點(diǎn)云去噪、去冗余、點(diǎn)云分類(lèi)、點(diǎn)云賦色等系列操作后,使用處理后的點(diǎn)云生產(chǎn)點(diǎn)線地形數(shù)據(jù)。使用預(yù)處理后計(jì)算出的POS數(shù)據(jù)、光學(xué)影像數(shù)據(jù)與航攝儀檢校參數(shù)生產(chǎn)正射影像圖(DOM),再根據(jù)DOM采集地物數(shù)據(jù)。最后將地形點(diǎn)線數(shù)據(jù)與地物數(shù)據(jù)結(jié)合后再人工編修、整飾、質(zhì)檢生產(chǎn)最終的數(shù)字線劃圖(DLG)。
從學(xué)歷、專(zhuān)業(yè)、工作年限、經(jīng)驗(yàn)、能力素質(zhì)、認(rèn)證、專(zhuān)業(yè)技能、熟練程度等多個(gè)維度構(gòu)建緊缺崗位的崗位畫(huà)像。企業(yè)招聘人員會(huì)在招聘網(wǎng)站對(duì)招聘崗位進(jìn)行詳細(xì)的崗位要求描述。通過(guò)對(duì)企業(yè)崗位要求描述進(jìn)行文本分析,將崗位要求分為八大類(lèi),分別是能力素質(zhì)、專(zhuān)業(yè)認(rèn)證、學(xué)歷水平、經(jīng)驗(yàn)要求、經(jīng)驗(yàn)?zāi)晗蕖⒓寄苷莆粘潭取⑺鶎W(xué)專(zhuān)業(yè)、專(zhuān)業(yè)技能。目錄以八大類(lèi)要求為崗位畫(huà)像維度,全方位展示每個(gè)緊缺崗位的能力、技能、經(jīng)驗(yàn)等具體要求情況,并對(duì)崗位的具體要求按照需求數(shù)量進(jìn)行排序。
2 工程應(yīng)用
本次使用同一套機(jī)載LiDAR系統(tǒng)對(duì)平地、丘陵和山地3種地形的2個(gè)案例項(xiàng)目進(jìn)行測(cè)繪并對(duì)成果進(jìn)行分析。LiDAR參數(shù)為:最大測(cè)量距離1 350 m(反射率>60%),最大視場(chǎng)角330°,測(cè)量精度1.5 cm,姿態(tài)角度精度為0.005°,無(wú)限次回波。相機(jī)參數(shù)為:有效像素4 200萬(wàn),鏡頭焦距18 mm。
2.1 案例1
(1) 概況與方案
該項(xiàng)目位于內(nèi)蒙古自治區(qū),為光伏能源基地建設(shè)項(xiàng)目。項(xiàng)目面積約為10 km2,地形類(lèi)型為平地和丘陵沙地,地物以灌木為主,通車(chē)?yán)щy,擬生產(chǎn)1∶500地形圖。在項(xiàng)目范圍內(nèi)按常規(guī)方法均勻布設(shè)像控點(diǎn),并使用RTK實(shí)測(cè)若干地面檢查點(diǎn)作為對(duì)成果精度的檢核[16-17]。設(shè)計(jì)本案例的目的為計(jì)算同一地區(qū)機(jī)載LiDAR數(shù)據(jù)與標(biāo)準(zhǔn)像控光學(xué)相機(jī)航測(cè)數(shù)據(jù)的平面高程精度,并分析不同密度和厚度的植被覆蓋區(qū)2種點(diǎn)云的高程差值情況。
使用機(jī)載LiDAR系統(tǒng)對(duì)項(xiàng)目區(qū)域進(jìn)行航測(cè)后,設(shè)計(jì)A、B兩種方案將獲取到的數(shù)據(jù)分開(kāi)后計(jì)算并輸出成果。方案A為免像控機(jī)載LiDAR作業(yè)技術(shù)應(yīng)用,使用LiDAR點(diǎn)云數(shù)據(jù)和光學(xué)影像等數(shù)據(jù)生產(chǎn)中間數(shù)據(jù)后制圖,生產(chǎn)過(guò)程中無(wú)地面像控點(diǎn)參與其中;方案B為標(biāo)準(zhǔn)像控光學(xué)相機(jī)測(cè)圖技術(shù)應(yīng)用,使用光學(xué)影像數(shù)據(jù)結(jié)合地面像控點(diǎn)數(shù)據(jù)生產(chǎn)中間成果后制圖。
使用方案A生產(chǎn)的中間數(shù)據(jù)DOM和LiDAR點(diǎn)云成果記為Ad與Al,使用方案B生產(chǎn)的中間數(shù)據(jù)DOM和光學(xué)點(diǎn)云成果記為Bd與Bl。2種方案的成果數(shù)據(jù)與原始數(shù)據(jù)對(duì)應(yīng)情況見(jiàn)表1。
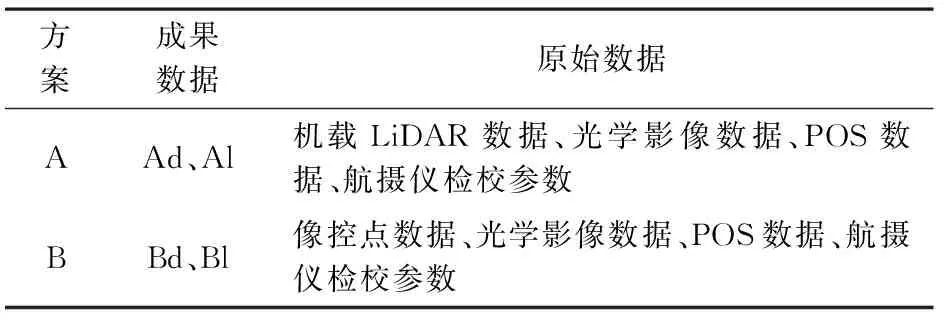
表1 方案A、方案B成果數(shù)據(jù)與原始數(shù)據(jù)
(2) 精度檢查及結(jié)果分析
均進(jìn)行去噪、去冗、地面點(diǎn)分類(lèi)等操作后,將2種點(diǎn)云進(jìn)行疊加對(duì)比分析,再使用實(shí)測(cè)檢查點(diǎn)對(duì)2種DOM數(shù)據(jù)平面精度及2種點(diǎn)云的高程精度進(jìn)行檢查。中誤差計(jì)算如下:
(5)
公式(5)中:m代表中誤差,m;Δi代表較差,m;n為檢查點(diǎn)個(gè)數(shù)。
在項(xiàng)目范圍內(nèi)分別挑選公路、田地、荒地、草地等地表植被覆蓋由少至多的不同區(qū)域進(jìn)行機(jī)載LiDAR點(diǎn)云和光學(xué)影像點(diǎn)云剖面對(duì)比。對(duì)比后發(fā)現(xiàn),同一剖面上Al與Bl在公路區(qū)的高程較差最大不超過(guò)0.03 m,剖面對(duì)比圖如圖3(a)所示;田地區(qū)高程較差最大不超過(guò)0.05 m,剖面對(duì)比如圖3(b)所示;荒地區(qū)高程較差最大不超過(guò)0.10 m,剖面對(duì)比如圖3(c)所示;草地區(qū)高程較差最大不超過(guò)0.10 m,剖面對(duì)比如圖3(d)所示。通過(guò)4種區(qū)域的剖面對(duì)比圖并結(jié)合實(shí)測(cè)檢查點(diǎn)檢查,發(fā)現(xiàn)在地表裸露較多的公路、田地區(qū)域Al與Bl高程接近,植被覆蓋的荒地、草地區(qū)域Al的精度較Bl更高。
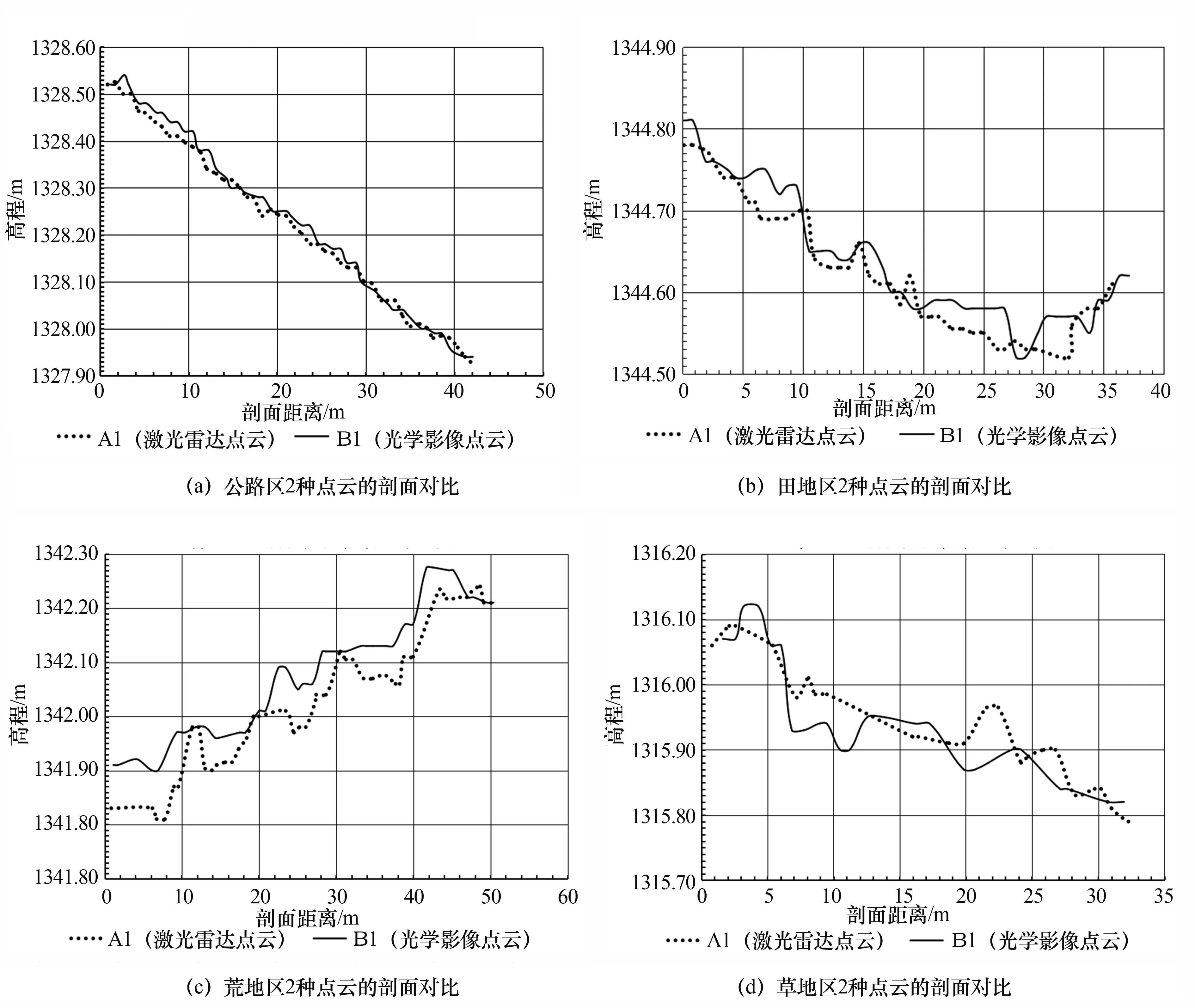
圖3 不同區(qū)域Al(激光雷達(dá)點(diǎn)云)與Bl(光學(xué)影像點(diǎn)云)剖面對(duì)比
2.2 案例2
(1) 概況與方案
該項(xiàng)目位于云南省,為分布式山地光伏項(xiàng)目。項(xiàng)目總面積約為5 km2,地形類(lèi)型為山地,地物以大面積灌木及部分樹(shù)林為主,無(wú)通車(chē)條件,像控點(diǎn)布設(shè)困難,擬生產(chǎn)1∶500地形圖。設(shè)計(jì)本案例的目的為檢查分析機(jī)載LiDAR免除像控點(diǎn)進(jìn)行1∶500地形圖測(cè)繪的成果精度。
在案例區(qū)范圍內(nèi)使用RTK在房角、電桿根部、道路標(biāo)線等能明顯分辨平面位置區(qū)域?qū)崪y(cè)平面檢查點(diǎn)34個(gè),在草地、林地及裸露區(qū)地面實(shí)測(cè)高程檢查點(diǎn)285個(gè),未測(cè)設(shè)像控點(diǎn),使用LiDAR系統(tǒng)對(duì)項(xiàng)目區(qū)域進(jìn)行航測(cè)。使用實(shí)測(cè)檢查點(diǎn)對(duì)機(jī)載LiDAR點(diǎn)云和平面地物數(shù)據(jù)進(jìn)行精度檢查。
(2) 精度檢查及結(jié)果分析
使用實(shí)測(cè)檢查點(diǎn)檢查機(jī)載LiDAR點(diǎn)云的高程精度,檢查DOM的地物平面精度,通過(guò)計(jì)算得到點(diǎn)云和DOM平面及高程中誤差。統(tǒng)計(jì)結(jié)果見(jiàn)表2、3和表4 。
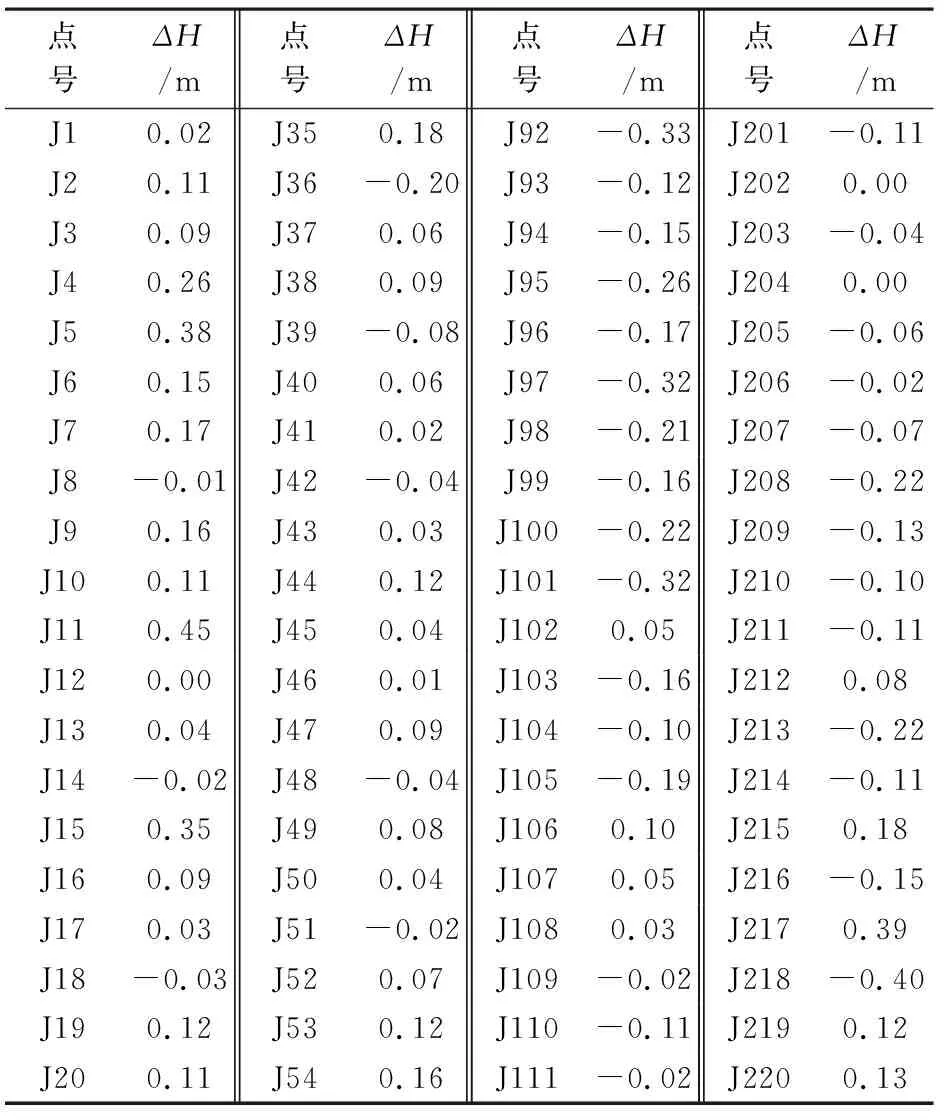
表2 部分高程較差統(tǒng)計(jì)表
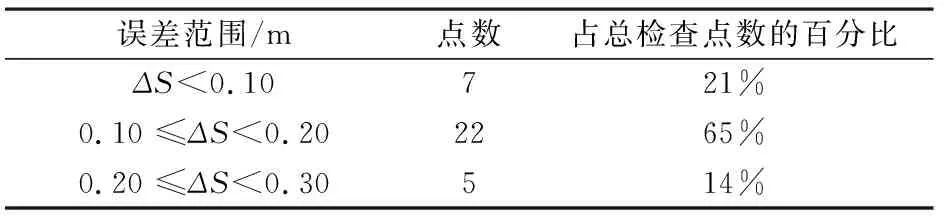
表3 平面位置誤差統(tǒng)計(jì)表
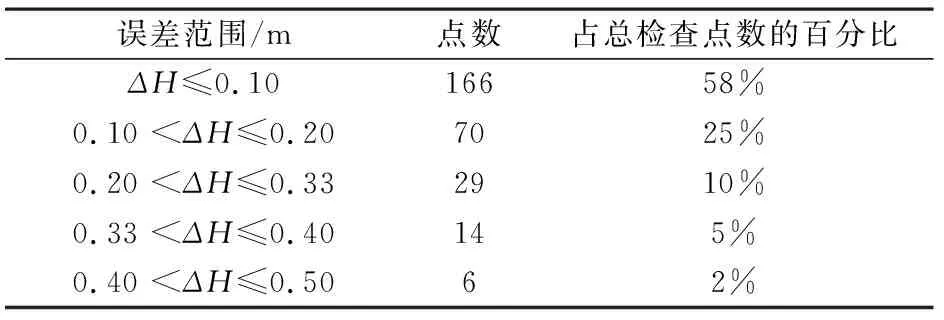
表4 高程誤差統(tǒng)計(jì)表
根據(jù)GB 50026-2020《工程測(cè)量標(biāo)準(zhǔn)》中的要求,測(cè)制1∶500地形圖時(shí)山地地形的平面中誤差為0.40 m,高程中誤差為0.33 m[11]。通過(guò)計(jì)算得出:本次平面位置中誤差mS為0.20 m,DOM平面精度滿足相應(yīng)要求;小于等于1倍平面中誤差限差的點(diǎn)占比100%,無(wú)大于1倍平面中誤差的點(diǎn)。高程中誤差mH為0.18 m,點(diǎn)位高程精度滿足相應(yīng)要求;小于等于1倍高程中誤差限差的點(diǎn)占比93%,大于1倍高程中誤差小于2倍高程中誤差的點(diǎn)占比7%,無(wú)大于2倍高程中誤差的點(diǎn)。
3 結(jié) 論
(1)在平地、丘陵、山地3種地形中使用機(jī)載激光雷達(dá)系統(tǒng)免像控進(jìn)行航測(cè),地形圖成果平面中誤差均不大于0.20 m,高程中誤差均不大于0.18 m,平面高程中誤差滿足測(cè)繪規(guī)范中1∶500地形圖的精度要求。表明機(jī)載激光雷達(dá)技術(shù)可替代標(biāo)準(zhǔn)像控光學(xué)影像航測(cè)技術(shù)免像控測(cè)制1∶500地形圖。
(2)通過(guò)剖面圖對(duì)比和實(shí)測(cè)點(diǎn)檢查發(fā)現(xiàn),機(jī)載雷達(dá)點(diǎn)云、光學(xué)影像點(diǎn)云的高程較差與測(cè)量區(qū)域的植被覆蓋厚度、密度成正相關(guān),雷達(dá)點(diǎn)云高程更接近檢查點(diǎn)高程成果。表明在植被覆蓋區(qū)機(jī)載激光雷達(dá)系統(tǒng)能更加準(zhǔn)確的測(cè)量地面高程,較傳統(tǒng)光學(xué)相機(jī)航測(cè)精度更優(yōu)。
猜你喜歡
城市勘測(cè)(2023年5期)2023-11-03 01:32:36
經(jīng)緯天地(2021年5期)2021-12-27 02:32:28
浙江國(guó)土資源(2019年10期)2019-10-31 03:17:00
建材發(fā)展導(dǎo)向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國(guó)公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛(wèi)星與網(wǎng)絡(luò)(2015年5期)2015-12-20 09:07:37
衛(wèi)星與網(wǎng)絡(luò)(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09