變電站倒閘操作機器人的探索及應用
2022-11-22 06:16:14戚中譯郭建峰
農村電氣化 2022年11期
戚中譯,郭建峰
(國網浙江省電力有限公司嘉興供電公司,浙江 嘉興 314000)
倒閘操作是變電站的核心工作,是電力系統必不可少的作業環節,必須遵守操作票制度、監護制度,嚴格按照操作流程執行。傳統倒閘作業以及巡檢業務主要以人為運維為主,按規定通常需兩人一組前往變電站進行倒閘作業。隨著信息化水平提高,電網規模擴大,運檢業務量與日俱增,變電站倒閘操作機器人應運而生。
1 變電站倒閘操作的突出問題
1.1 人占比降低,缺員情況顯著
Q/GDW 1799.1—2013《國家電網公司電力安全工作規程(變電部分)》規定:倒閘操作需有監護人和操作人同時在場[2],每項操作須進行嚴格審核、檢查、糾正、確認,要求精神狀態、情緒正常不受影響。要求操作人員素質高,責任心強,因此人員篩選十分嚴格。隨著操作頻次增加,人占比降低,缺員成為共性問題。
1.2 安全風險凸顯
為保證供電服務優質,停送電須按計劃進行[3-4]。通常一組倒閘作業人員對應多個變電站,根據電網的接線方式調整,導致出現一組人員對應多個變電站的同時操作,人員疲勞操作,安全風險隨之增加。
1.3 操作效率低,操作成本高
據統計,多數變電站通常建設在遠離市區,人際相對較少的地區。多數倒閘作業操作時常通常在0.5 h左右,而驅車前往變電站往返多達2 h。導致操作效率低,用車成本增加。
2 變電站倒閘操作機器人的應用技術
深度相機標定技術是本機器人核心技術。該技術關聯機械臂坐標、相機坐標2個坐標系。
相機坐標系以攝像機為自身中心,衡量測量目標位置。該標系以攝像機的光心作為原點O,通過成像平面確定X、Y軸,光軸方向為Z軸,垂直XOY平面。
機械臂坐標系:X軸平行地面,Y軸與地面垂直,Z軸垂直于X軸與Y軸,俯仰角為繞X軸旋轉角度,偏轉角為繞Y軸旋轉角度。
通過計算出變換矩陣,使得所有通過深度相機獲得的目標的三維坐標可以轉換到機械臂坐標系當中使用,從而聯立被操作目標和機械臂運動之間的關系。
3 變電站倒閘操作機器人的系統構架
如圖1所示,變電站倒閘操作機器人的整體架構包含機器人本體和集控中心&工區服務器2部分。帶電操作機器人本體和集控中心&工區服務器通過無線和有線網絡建立連接。用戶通過集控中心&工區提供的用戶界面遠程查看站所環境和機器人狀態數據,以及下發巡檢和操作指令等,而機器人本體接收到巡檢和操作指令后執行相應的柜體狀態識別或者倒閘目標操作。
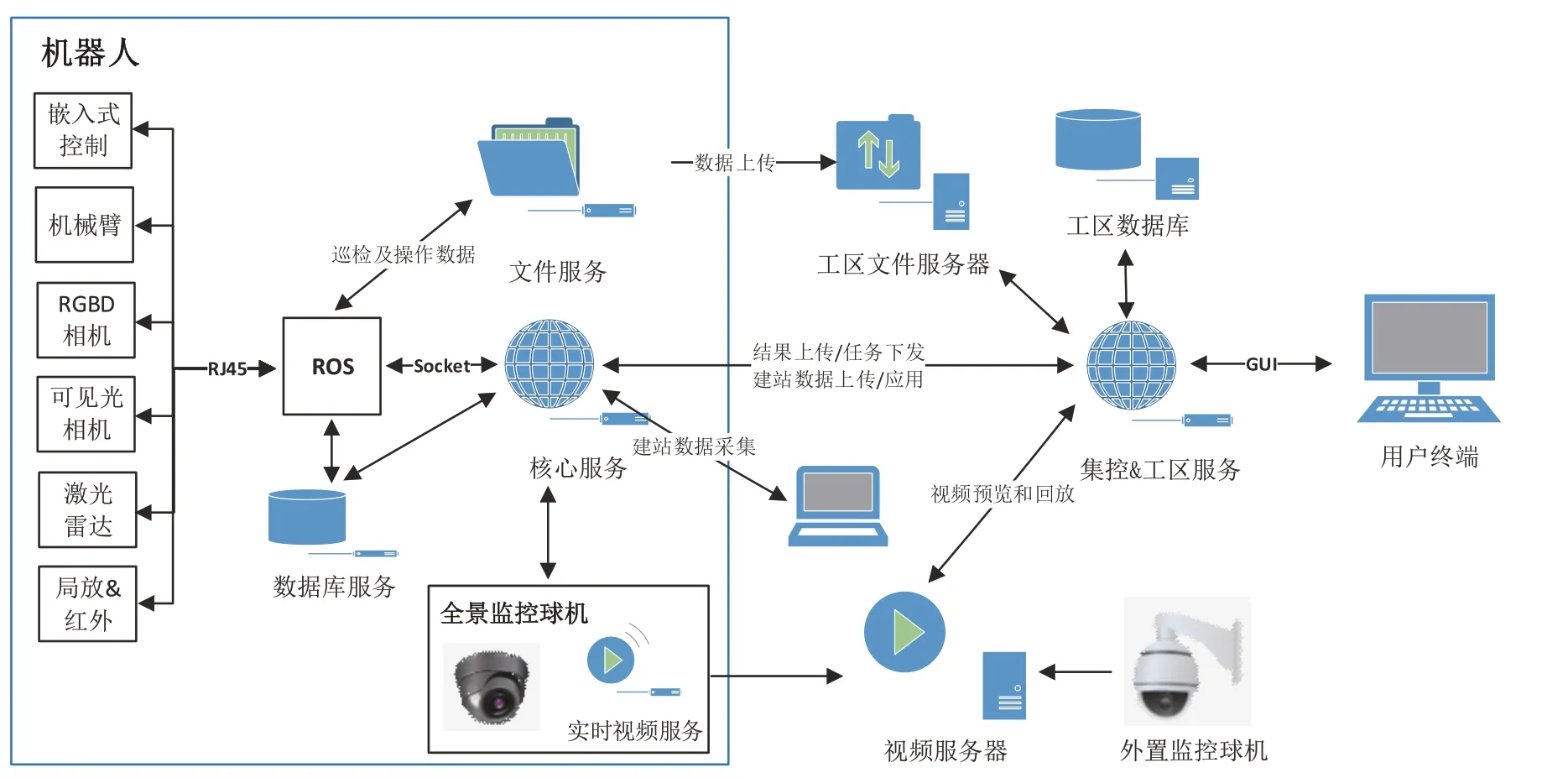
圖1 系統架構圖
如圖2所示,變電站倒閘操作機機器人主要包括集控&工區服務、核心服務和ROS三部分。
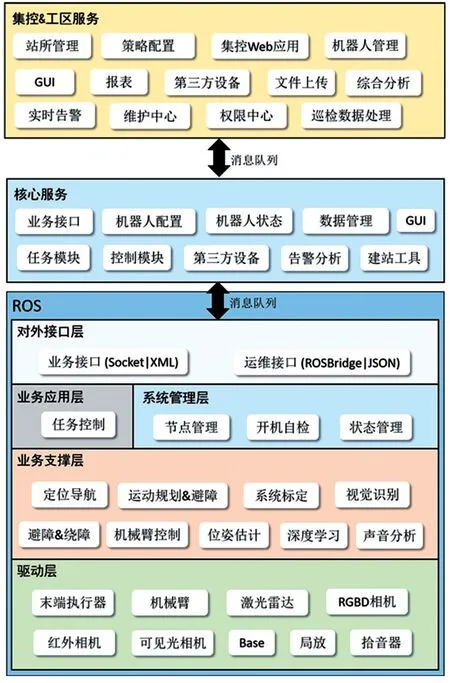
圖2 系統模塊圖
集控&工區服務:提供用戶操作界面,對所有接入站所和機器人進行統一管理和控制,并提供巡檢數據綜合處理與分析、實時告警、報表導出、權限配置等功能。
核心服務:提供機器人端的訪問和控制界面,可以實現參數配置、任務管理、建站工具、告警分析等功能,也是機器人底層與集控中心&工區之間信令和數據傳輸的橋梁。
ROS:由業務應用層、對外接口層、業務支撐層、系統管理層、驅動層組成。對外接口層對外提供業務接口和運維接口,實現業務和運維相關的遠程訪問和控制功能。業務應用層實現任務管理及控制效果。系統管理層功能包括ROS節點管理(心跳、自動喚起等)、機器人開機自檢以及機器人狀態切換等功能。業務支撐層是核心算法的實現層,包括建圖、定位導航、深度學習、視覺識別、運動規劃及避障、噪音分析等功能。驅動層則對機器人本體搭載的硬件接口進行抽象,實現數據獲取和控制功能。
4 操作機器人的硬件設計
如圖3所示,機器人整體由3部分構成:六軸機械臂,手車地刀浮動平臺、帶激光定位及避障功能的底盤。并涵蓋以下設備。

圖3 操作機器人實物圖
可見光相機:放置在機械臂末端平臺上,用于巡檢過程的表計讀數識別。
全景監控球機:吊裝在天花板上,對機器人操作和運行過程進行監控和錄像。在測點操作過程中,全景監控球機對關聯測點進行抓圖,并調用視覺節點進行狀態識別,實現測點操作的視覺閉環。
深度相機:獲取深度信息,用于估計操作目標位置,從而引導機械臂進行特定操作。機器人上配置兩個深度相機,其中一個安裝在機械臂末端,另一個安裝在手車地刀浮動平臺。深度相機抓取的可見光照片也用于操作測點的位置定位。
導航激光雷達:安裝在機器人前端,用于SLAM,對配電房環境進行點云掃描,建立環境地圖,并實現機器人定位與導航。
避障激光雷達:安裝在機器人后端,用于行走時避障,避免超聲波避障存在的盲區和誤報問題。
IMU:用于支撐機器人繞障功能。
六軸機械臂:加裝末端執行器,用于完成機器人目標操作功能。
紅外相機:放置在機械臂末端平臺上,用于巡檢時對柜體目標進行測溫。
局放檢測儀:放置在機械臂末端平臺上,用于巡檢時檢測柜體內部局部放電強度的傳感器。
5 應用情況及效果
目前操作機器人已實現7項操作任務,具體如表1所示。操作機器人從運行改到線路檢修或者從線路檢修改到運行的整個操作流程,總耗時約為20 min作為試運行最早開始的一批變電站,至今已持續無故障運行2萬多h。

表1 操作機器人已實現操作任務
6 結束語
本文對變電站倒閘操作機器人的技術進行了探索,實現了對變電站開關室倒閘狀態的切換操作,以及變電站開關柜的各狀態展示、目標識別、故障智能診斷及綜合分析,有效解決人工操作風險,降低操作成本,并完成了實際應用,具有一定的借鑒意義。
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
當代工人(2020年8期)2020-05-25 09:07:38
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
電子制作(2018年8期)2018-06-26 06:43:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
電子制作(2017年8期)2017-06-05 09:36:15
科技知識動漫(2016年8期)2016-07-29 20:40:09
現代工業經濟和信息化(2016年5期)2016-05-17 05:35:57