基于自適應虛擬阻抗的牽引輔助逆變器并聯控制
2022-11-18 03:26:00譚喜堂李愛華朱琴躍魏偉李姚霖
電機與控制學報 2022年10期
譚喜堂,李愛華,朱琴躍,魏偉,李姚霖
(同濟大學 電子與信息工程學院,上海 201804)
0 引 言
牽引輔助逆變器是保證城市軌道交通列車正常運行的重要組成部分,其工作狀態直接影響到車輛運行的安全性能。在列車輔助供電系統中,單臺逆變器由于無法滿足系統的可靠性和冗余性需求,現多采用逆變器并聯運行方式[1-2]。目前,并聯逆變器的控制技術主要分為有互連線控制和無互連線控制兩類[3]。其中有互連線控制功率分配準確、均流精度高,但過于依賴通信手段,若通信線路發生故障或擾動可能會導致控制不精確甚至系統失穩。無互連線控制則更多采用下垂控制,該方法可以實現逆變器獨立運行和即插即用功能[4-5],近年來成為逆變器并聯控制的研究熱點。
然而,當各輔助逆變器的等效輸出阻抗不一致時,會導致并聯系統功率分配不均,同時也會增大系統環流[6-10]。為了解決等效輸出阻抗不一致對系統功率分配和環流的影響,國內外學者進行了深入的研究。文獻[11]在傳統下垂控制的基礎上引入分層控制,利用中央控制器計算無功額定值,實現功率均分的目的。文獻[12]采用統一的二次控制器,生成各臺逆變器的參考電壓和頻率,以此實現均分功率,但文獻[11-12]由于引入了通信手段,導致系統可靠性降低。文獻[13]通過改變下垂系數,從而使分布式電源的負載功率均分,但自適應下垂系數計算過程較復雜且需要提前獲悉線路參數,此外,下垂系數的改變易降低系統運行穩定性。現大多數研究都是采用基于虛擬阻抗的下垂控制技術,即在傳統下垂控制中引入已經設計好的虛擬阻抗來重塑逆變器的輸出阻抗[14],使得逆變器并聯支路的等效輸出阻抗之間能夠互相匹配,減少功率之間的相互耦合,從而實現并聯逆變器的功率均分和環流抑制。文獻[15]采用一種改進下垂控制與虛擬電抗相結合的控制方法實現系統有功功率與無功功率的解耦, 但該方法的精度不高。文獻[16-19]通過引入虛擬阻抗來改善線路阻抗的特性,解決系統輸出功率耦合的問題,但虛擬阻抗的引入會使得公共母線電壓降低。
為了解決上述問題,本文針對牽引輔助逆變器并聯供電系統,首先分析其功率和環流特性,基于阻性下垂控制方法,引入自適應虛擬阻抗,保證列車牽引輔助逆變器并聯供電系統的各模塊等效輸出阻抗一致,并在此基礎上進行負載電壓跌落補償,從而解決由于并聯系統中各輔助逆變器等效輸出阻抗不一致所導致的傳統下垂控制策略中系統環流較大、功率分配不均及輸出負載電壓跌落的問題。最后,通過仿真和實驗對所提控制策略的有效性進行驗證。
1 功率和環流特性分析
1.1 并聯輔助逆變器的功率特性

由圖1可得各輔助逆變器(i=1,2)的等效輸出阻抗為
ZLi=ZLi∠θLi=Zi∠θi+Zli∠θli。
(1)
輸出電流為
(2)
各輔助逆變器的輸出復功率為
(3)
由此可得Pi和Qi表達式為:
(4)
在正常穩定運行情況下,輔助逆變器輸出電壓與并聯點電壓的相角差δ1和δ2很小,基本接近0°。同時,實際牽引輔助逆變器為低壓系統,其線路阻抗呈阻性,即θLi=0°,由此式(4)可表示為:
(5)
可見,輔助逆變器輸出的有功功率主要是由其輸出電壓的幅值Ei決定,而輸出的無功功率主要取決于輸出電壓的相位δi,阻性下垂控制可通過分別調整Ei和δi來實現對輔助逆變器輸出有功功率和無功功率的控制,相應控制表達式為:
(6)
式中:ω0和E0為初始給定的頻率及電壓幅值;ni和mi分別為有功下垂系數與無功下垂系數;Pi及Qi為輔助逆變器實際輸出有功功率及無功功率;ωref和Eref為經過功率下垂計算后給定的輔助逆變器參考電壓的頻率和幅值。
由式(6)可知,當輔助逆變器輸出有功較大,通過下垂控制減小起始輸出電壓幅值,能夠控制其輸出有功過大;而當輔助逆變器輸出的無功較大時,則通過下垂控制增大起始頻率,減少無功輸出,從而實現輔助逆變器有功和無功的平衡輸出。
但傳統阻性下垂控制也存在著電壓跌落與有功功率分配之間的固有矛盾,如圖2所示,當并聯的兩臺輔助逆變器等效輸出阻抗Z1≠Z2時,必然存在功率均分與電壓偏差的矛盾。當通過選擇降低有功下垂系數來達到更好的有功分配效果時,即ΔP2<ΔP1,在電壓跌落上則會導致此時的電壓偏差ΔE2>ΔE1,從而導致并聯系統輸出電壓存在更大的偏差,影響并聯系統的穩定運行。
1.2 并聯輔助逆變器環流
(7)
根據式(7)可知,并聯系統中各輔助逆變器間環流的大小,不僅取決于各個輔助逆變器輸出電壓,還取決于各輔助逆變器的等效輸出阻抗,在實際的輔助逆變器并聯系統中,各個輔助逆變器的等效輸出阻抗不完全一致時,將會導致系統環流較大,由此表明,雖然通過阻性下垂控制實現了對各輔助逆變器輸出電壓幅值和相位的控制,但由于等效輸出阻抗的差異也可能導致環流增大。
2 基于自適應虛擬阻抗下垂并聯控制

2.1 自適應虛擬阻抗設計
由第1節分析可知,傳統阻性下垂控制能夠通過調節各輔助逆變器的輸出電壓幅值和相位來分別實現負載有功功率和無功功率的均分,但并聯系統等效輸出阻抗不一致也會導致系統出現環流增大的問題,通過虛擬阻抗技術對并聯系統中各輔助逆變器的等效輸出阻抗進行調整,能夠解決此問題。而傳統的虛擬阻抗添加方式會造成系統輸出電壓的嚴重跌落。對此,引入自適應虛擬阻抗,在能夠避免由于引入較大虛擬阻抗參數而導致過大電壓跌落的同時,也能夠將輔助逆變器等效輸出阻抗配置純阻性,進而保證阻性下垂控制在輔助逆變器并聯系統中的適用性。
對式(4)中阻抗進一步展開,可得系統有功功率和無功功率為:
(8)
由于逆變器并聯系統中,穩定運行時輸出相角δi很小且基本為0,式(8)可進一步簡化為:
(9)
由式(9)可以看出,等效輸出阻抗中電阻、感抗參數分別與輸出有功功率和無功功率相關,即Pi∝RLi,Qi∝XLi。
由此,可設計自適應虛擬阻抗為:
(10)
式中:Rset為預設定虛擬電阻值;Po為輔助逆變器實際輸出有功功率;Qo為輔助逆變器實際輸出無功功率;Pref為輔助逆變器輸出最大有功功率;Qref為輔助逆變器輸出最大無功功率;kRp、kXp分別為虛擬阻抗中電阻、電抗的比例調整系數;kRi、kXi分別為虛擬阻抗中電阻、電抗的積分調整系數;P′、Q′分別為輔助逆變器實際輸出有功功率、無功功率的逼近值,其表達式為:
(11)
P′與Q′初始給定值分別為Pref與Qref,P′、Q′通過PI控制器不斷改變RV、XV的值,從而調節輔助逆變器實際的輸出有功功率及無功功率,最終P′、Q′會逐漸逼近Po、Qo,RV、XV和Po、Qo都會趨于穩定,由此達到自適應效果。理想情況下,通過設定的電阻值Rset對各個輔助逆變器并聯等效輸出阻抗進行整定,從而進一步控制由于等效輸出阻抗不一致導致的功率均分偏差及系統環流大小。
為限制加入自適應虛擬阻抗后的輔助逆變器并聯系統的負載電壓跌落,預設定虛擬電阻值Rset以及虛擬感抗參數需要添加如下限制條件:
(12)
輔助逆變器輸出有功功率取得最大值即對應實際輸出最大有功功率,Rset與自適應虛擬阻抗中電阻之差應大于0;而在實際輸出最小有功功率時應小于實際并聯輸出等效電阻中最大電阻值。同理,在實際輸出最大無功功率時,應限制負虛擬感抗小于0,輸出最小無功功率時,則需要小于實際線路電抗的最大值。該限制條件為Rset、kRp、kXp以及kRi、kXi參數調整提供了一個取值參考。
2.2 電壓跌落補償計算
由于引入自適應虛擬阻抗,輸出負載電壓與給定參考電壓間的電壓偏差增大,此時的電壓偏差相量圖如圖4所示,為保證并聯供電系統輸出負載電壓滿足負載額定電壓的波動范圍,需要進行電壓補償。
由圖4可得出電壓偏差的橫向和縱向分量分別為:
(13)
由于牽引輔助逆變系統中等效輸出阻抗的電抗較小,故電壓橫向分量主要由有功功率大小決定,電壓縱向分量則主要由無功功率大小決定。而電壓跌落一般由橫向分量決定,因此補償電壓可表示為
(14)
理想情況下,通過自適應虛擬阻抗控制方法可將并聯輸出等效阻抗設定為Rset,為簡化電壓補償計算過程,將輸入電壓跌落補償等效為理想情況下輸出電流在設定虛擬阻抗Rset上的電壓降,即
(15)
2.3 雙閉環解耦控制
由于輔助逆變器采用LC濾波,電感電容元件會導致d-q軸上分量存在耦合情況,為對其進行有效解耦,采用電壓電流雙閉環控制方法如圖5所示。
由圖3可得,在d-q坐標系下有:
(16)
(17)
式中:ud、uq分別為三相濾波電感電壓和濾波電容電壓之和在d-q軸下的分量;uod、uoq分別為輔助逆變器三相負載電壓在d-q軸下的分量;iLd、iLq分別為輔助逆變器三相輸出電流在d-q軸下的分量;iod、ioq分別為輔助逆變器三相負載電流在d-q軸下的分量。
由式(16)和式(17)可知,由于d軸分量與q軸分量之間存在耦合關系,為此采用電流內環和電壓外環的雙閉環控制方法,對d-q軸上的電壓和電流分量進行解耦控制。
根據式(16)對電流內環進行閉環設計,相應的輸出電壓為:
(18)
(19)
同理,根據式(17)對電壓外環進行閉環控制設計,為了保證輸出電壓的快速穩定,在電壓外環采用比例積分控制器,參考電流值可以設為:
(20)
式中uud和uuq為比例積分控制器輸出的d-q軸參考電壓,表達式為:
(21)
由此,通過在閉環反饋d-q軸上各自引入電流電壓反饋,從而對電壓外環d-q軸的耦合分量ωLfiLq、-ωLfiLd和電流內環d-q軸耦合分量ωCfuoq、-ωCfuod形成抵消,進而實現d-q軸分量的解耦,實現對電流、電壓的無誤差跟蹤。
3 仿真驗證
為驗證所提的基于阻性自適應下垂并聯供電控制及電壓跌落補償方法的有效性,在MATLAB/Simulink中搭建簡化的列車用兩輔助逆變器并聯系統仿真模型。通過模擬輔助逆變器并入、負載突加及負載突減三種工況,對傳統下垂并聯控制和自適應虛擬阻抗下垂并聯控制兩種控制方法的仿真結果進行對比分析。
假設t=0~0.2 s時,并聯系統中輔助逆變器1帶載啟動運行,t=0.2 s時,輔助逆變器2帶載并入;t=0.4 s時,并聯系統突加負載;t=0.6 s時,并聯系統突減負載。并聯供電系統仿真運行時間為0.8 s,仿真參數設置如表1所示。
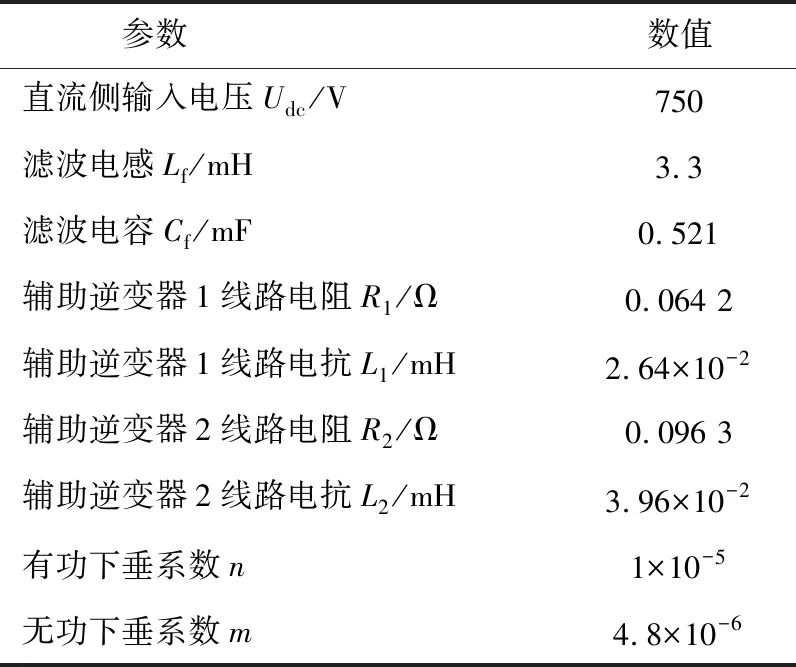
表1 逆變器并聯系統仿真參數
3.1 功率分配仿真結果
3.1.1 有功功率分配仿真結果
圖6為并聯系統在輔助逆變器并入、突加負載以及突減負載三種工況下傳統控制方法和所提方法的有功功率分配仿真結果。在系統輸出功率穩定后,傳統控制方法和所提方法在三種工況下的系統有功功率差值ΔP和均分差值如表2所示。
可見,在系統輸出功率穩定后,所提方法較傳統控制方法在輔助逆變器并入、突加負載及突減負載工況下有功功率均分差值明顯下降,并聯系統中功率得以更好平均分配。
3.1.2 無功功率仿真結果
圖7為并聯系統在輔助逆變器并入、突加負載以及突減負載三種工況下傳統控制方法和所提方法的無功功率分配仿真結果。在系統輸出功率穩定后,傳統控制方法和所提方法在三種工況下的系統無功功率差值ΔQ和均分差值如表3所示。
可見,在系統輸出功率穩定后,所提方法較傳統控制方法在輔助逆變器并入、突加負載及突減負載工況下無功功率均分差值明顯下降,并聯系統中功率得以更好平均分配。
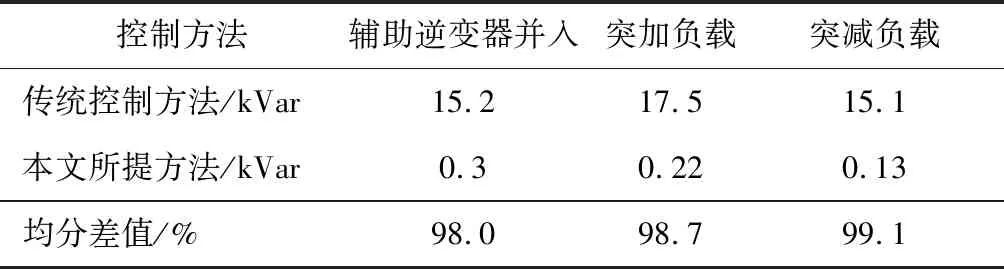
表3 兩種控制方法下系統無功功率ΔQ對比
3.2 環流仿真結果
圖8為并聯系統在輔助逆變器并入、突加負載及突減負載三種工況下傳統控制方法與所提方法的環流仿真結果。由快速傅里葉變換(fast Fourier transform,FFT)分析可知,傳統控制方法和所提方法在三種工況下的系統環流幅值和對應環流幅值下降百分比如表4所示。由此表明,所提方法顯著抑制了系統環流,提高了并聯系統穩定性。
3.3 電壓補償仿真結果
圖9為并聯系統在輔助逆變器并入、突加負載以及突減負載三種工況下無電壓補償控制與添加電壓補償控制的輸出負載電壓波形及其穩定負載電壓FFT分析。在設定同樣的下垂系數及參考電壓參數的情況下,無電壓補償的傳統控制方法和添加電壓補償的所提方法的負載電壓跌落如表5所示。
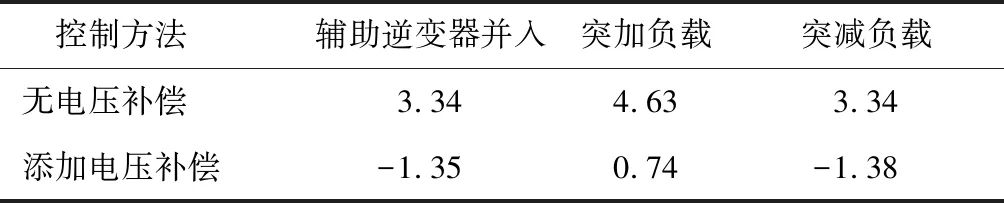
表5 電壓補償控制前后負載電壓跌落對比
可見,添加電壓補償控制較無電壓補償控制的負載電壓跌落更低。故添加電壓補償控制能夠保證并聯系統添加自適應虛擬阻抗后,系統輸出負載電壓跌落波動在±3%的范圍內,符合輔助逆變器并聯供電系統中負載電壓的波動要求。
4 實驗驗證
通過搭建兩輔助逆變器并聯供電的降功率實驗系統來驗證所提方法的有效性。實驗系統如圖10所示,其中編號1、2、3、4、6、7、8分別為輔助逆變器1、2控制器及驅動電路、功率開關管、主電路LC濾波器和并聯等效輸出阻抗(由于實驗室限制,實驗中線路阻抗僅采用不一致線路電阻作為等效線路阻抗),5為電壓傳感器,9為電流傳感器,10、11分別為并聯系統負載1和負載2。
4.1 功率分配實驗結果
4.1.1 有功功率分配實驗結果
通過輸出負載電流及負載參數能夠得出輸出功率數據并進行平滑處理,從而得出兩種控制方法在輔助逆變器并入、突加負載工況下的系統有功功率分配實驗結果對比圖,如圖11和圖12所示。圖中,通過將功率數據進行FFT頻譜分析,求取其在0 Hz處的幅值進行分析比較,可以得到傳統控制方法和所提方法在兩種工況下系統輸出有功功率分配及其偏差如表6所示。
可見,在所提方法下系統有功功率分配結果較傳統控制方法更好,偏差也顯著降低。
4.1.2 無功功率分配實驗結果
同理,可得兩種控制方法在輔助逆變器并入、突加負載工況下的系統無功功率分配實驗結果對比圖,如圖13和圖14所示。傳統控制方法和所提方法在兩種工況下系統輸出無功功率分配及其偏差如表7所示。
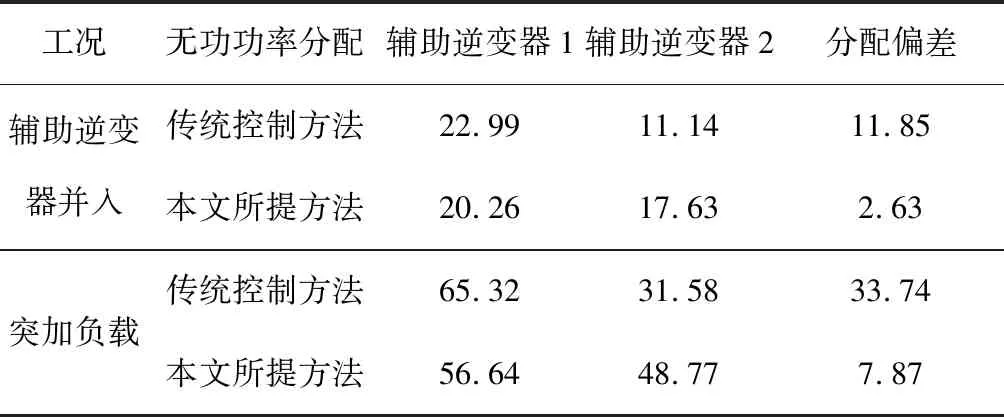
表7 兩種控制方法下系統無功功率分配結果對比
可見,在所提方法下系統無功功率分配結果較傳統控制方法更好,偏差也顯著降低。
4.2 環流實驗結果
兩種控制方法下并聯系統在輔助逆變器并入和突加負載工況的環流及其FFT頻譜分析如圖15和圖16所示。由系統環流FFT分析可知,兩種控制方法下的系統環流幅值和相應的下降百分比如表8所示。

表8 兩種控制方法下系統環流對比
由此可知,所提方法并聯系統的環流更小,保證并聯系統的正常運行,也降低了并聯系統運行損耗。
4.3 電壓補償實驗結果
圖17為無電壓補償控制和添加電壓補償控制的并聯系統全額運行負載電壓波形及其FFT頻譜圖,兩種控制方法中參考電壓為32 V,無電壓補償控制和添加電壓補償控制的輸出負載電壓幅值和跌落如表9所示。
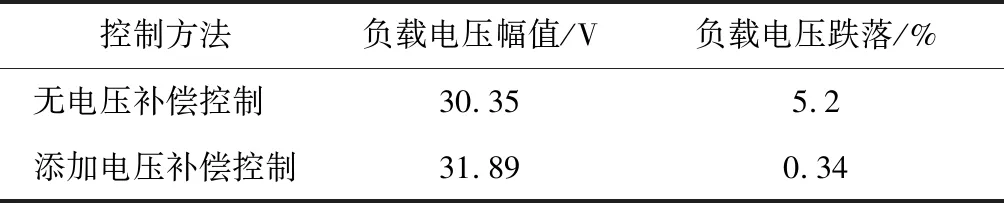
表9 電壓補償控制前后負載電壓對比
由此可以看出,無電壓跌落補償控制全額運行下電壓跌落已經超過±3%,無法滿足負載電壓穩定性要求,因此,負載可能工作于低電壓狀態而影響系統正常運行,添加電壓跌落補償能夠保證負載電壓跌落在±3%范圍內,保證系統穩定運行。
5 結 論
本文對列車牽引輔助逆變器并聯系統進行分析,提出一種基于自適應虛擬阻抗下垂并聯控制方法。在傳統阻性下垂控制的基礎上,引入自適應虛擬阻抗,對并聯系統中輔助逆變器等效輸出阻抗進行調整,解決了采用較大虛擬阻抗參數而導致的電壓跌落問題,能夠更好地將輔助逆變器等效輸出阻抗配置為純阻性,進而保證阻性下垂控制在低壓輔助逆變器并聯系統的適用性,在實現列車牽引輔助逆變器并聯系統負載功率均分的同時,也抑制了因系統線路阻抗不一致而產生的環流。在采用本文所提方法的仿真和降功率實驗中,系統負載功率均得到了更好的均分效果。在環流抑制效果上,仿真結果表明系統環流下降了近98%,實驗結果表明系統環流下降了近53%,均取得了明顯的環流抑制效果。與此同時,提出的電壓跌落補償控制,也能保證自適應虛擬阻抗加入后負載電壓跌落在±3%范圍內,實現了系統穩定運行時負載電壓跌落的有效控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12