基于STM32 的模擬電磁炮實驗裝置研究與實現
2022-11-18 14:01:18朱俊杰繆文南
電子設計工程 2022年22期
朱俊杰,繆文南
(廣州城市理工學院電子信息工程學院,廣東廣州 510800)
隨著科技的快速發展,軍事武器不斷更新迭代,電磁炮在軍事武器研究中受到越來越多的關注[1-3]。傳統的發射炮因為成本、精度、穩定性等問題,難以適應軍事武器的發展,而利用電磁技術研制的電磁炮具有彈藥初速塊、體積小、重量輕、命中率高等優點[4-6]。近年來,越來越多學者對電磁炮進行理論研究和實驗測試,文獻[7]提出了電磁炮高速彈藥膛內運動穩定性的研究,利用軌道炮的動力學和運動性能分析進行仿真,分析彈藥的速度和射擊距離。文獻[8]對三級電磁炮的研究與設計,實現了電磁炮遠距離的射擊。文獻[9]設計了一款電磁曲射炮裝置,使用云臺建立彈丸的運動軌跡計算位移。大部分的研究文獻主要對電磁炮的發射裝置進行了研究和實驗測試,對電磁炮發射的自動控制和射擊精度的性能研究文獻較少。因此,該文設計了一種新型的模擬電磁炮系統,該系統搭載了云臺、openmv 模塊、電磁炮射擊裝置,并使用BNO055 角度傳感器讀取電磁炮瞄準目標的角度,通過PID 算法實現對云臺轉向及電磁炮射擊裝置的閉環控制,研制的模擬電磁炮具有手動模式和自動模式尋靶功能。測試結果表明,模擬電磁炮打靶具有較高的精度和穩定性,達到了設計要求,為新型電磁炮的研究和設計提供了新的思路。
1 系統方案整體設計
系統選用觸摸屏作為人機交互界面,可選擇手動尋靶模式和自動尋靶模式。電磁炮裝置放在距離紅色引導標志目標230~330 cm 處,固定云臺的發射仰角,建立子彈斜拋運動模型,以便計算子彈初速度和偏航角。通過手動輸入目標距離或者使用openmv圖像識別模塊搜尋目標并計算目標距離,然后調整云臺偏航角,控制模擬電磁炮超級電容充放電時間,根據引導靶射擊地面上的環形靶。系統的整體示意圖如圖1 所示。
系統包含STM32F103 微處理器的主控系統、電磁曲射炮、兩軸舵機云臺、角度測量模塊、圖像識別模塊、電源管理模塊、觸摸屏人機交互界面七部分。系統硬件框圖如圖2 所示。
1.1 系統結構設計
根據系統方案設計,電磁曲射炮主要由舵機云臺、炮筒、線圈、超級電容組成,炮筒正對向下安裝攝像頭,用于前方目標的識別與跟蹤、測距功能,其效果圖與實物圖如圖3 所示。
1.2 主控系統與云臺
系統采用STM32F103 微處理器進行設計,為整套系統提供運算處理能力,實現電磁炮對目標靶的識別與精準射擊。控制過程主要包括云臺角度控制、電磁炮發射控制、數據軟件過濾、目標識別與跟蹤等。
云臺由兩軸舵機組成,形成二自由度控制系統,控制炮筒的俯仰角和偏航角,實現水平方向和俯仰方向的調整[10-11]。舵機采用RP8-S41 數字舵機,該舵機采用多路串行的全新架構,舵機可直接實現ID 的自動分配,反應速度可達到0.098 s/60°,有效角度為270°,扭矩達到45 kg/cm,主控系統通過輸入角度直接控制云臺偏航角和俯仰角。云臺安裝BNO055型號9 軸角度測量傳感器,利用PID 算法對舵機進行閉環控制,提高電磁炮射擊俯仰角和方位角的精度。裝置初始化時,云臺俯仰角和偏航角回歸至中心點。
1.3 電磁曲射炮線圈管設計
電磁炮又稱為“同軸發射器”,其中,單級感應線圈炮一般由儲能電源(如電容器組)、驅動線圈、發射組件(包括電樞和彈丸)和觸發開關等硬件組成[12]。電磁炮感應線圈設計需要考慮的參數眾多,主要包括驅動線圈匝數、磁導率、驅動線圈、銅線直徑、電容值、電壓值、電樞觸發位置等重要參數[13],設計難度較大,于是選擇線圈模擬器進行仿真設計。在仿真器上輸入原始數據,LCR 仿真數據欄中輸入電容耐壓值和電容值,通過計算分析得出各項參數,LCR 仿真圖及數據如圖4 所示。
系統選擇的彈體為直徑25 mm 的鐵球,炮管長120 mm,初始位置為-30 mm,初始速度為0 m/s,根據仿真得出數據,可獲得發射子彈的瞬時速度、能耗、效率等數據。然后系統鎖定云臺仰角,結合電容充放電時間獲取瞬間電壓,此時感應線圈管的瞬間電壓控制子彈的速度和距離。設計電路時,選擇額定電壓為470 V,超級電容C為1 000 μF,電容充放電計算如式(1)所示:
式中,V0為電容上的初始電壓值,Vu為電容充滿終止電壓值,Vt為任意時刻t電容上的電壓值。由上式可得,計算初始電壓為E的電容C通過R放電所需的時間。
1.4 電磁炮充放電電路設計
電磁炮充放電電路對電磁炮發射起到非常重要的作用,設計電路如圖5 所示,電路主要由繼電器、直流升壓電路、可控硅、超級電容組成。利用繼電器和可控硅實現主控系統對充電電路的控制,通過電路測試可知,該電路充放電可控性強、性能穩定且具有良好的抗干擾性。
2 系統軟件設計
2.1 系統總體流程設計
該裝置總體軟件流程圖如圖6 所示。系統啟動后首先對所有參數進行初始化,用戶可選擇自動瞄準和手動控制兩種模式。當選擇手動控制時,用戶輸入目標點距離和靶心中心軸線上的偏航角,首先根據建立的子彈運動模型計算電磁炮射程;然后主控器調整云臺姿態獲取偏航角;最后啟動對電容進行充電,根據充電時間閉合繼電器、發射子彈。
當用戶選擇自動瞄準模式時,主控器控制openmv從-45°~+45°進行掃描,當識別目標靶后,云臺調整電磁炮的俯仰角,讓電磁炮與目標靶取向在同一軸線上,測量電磁炮與環形靶中心點的距離。然后主控器將距離和云臺偏航角輸入子彈運動模型,啟動超級電容進行充電,根據充電時間閉合繼電器、發射子彈。
2.2 子彈運動模型分析
子彈發射運動軌跡為斜上拋運動軌跡,子彈以一定初速度斜向上拋出去,在忽略空氣阻力等情況下,子彈做勻變速曲線運動,運動軌跡為拋物線,根據運動力學定理,子彈合力由水平方向的彈射力和重力組成[14],如圖7 所示。
當線圈管與地面水平時,出口位置即為最高點,假設出口與地面的垂直距離為h,子彈落地與線圈管出口水平距離為S1,出口速度為Vout,由拋物線運動方程計算可得:
當子彈做斜拋運動時,忽略子彈在炮管與槍管內壁的摩擦力等因素,假設線圈炮出口與子彈落地位置為S2、子彈與地面的垂直高度為H,可計算出口的速度Vout,通過力學分析得,在t時刻,VX=Voutcosθ,VY=Voutsinθ-gt,由拋物線運動方程可得:
2.3 openmv目標靶識別與測距
openmv 攝像頭是一款小巧、低功耗、開源、低成本的機器視覺傳感器,系統采用openmv 模塊實現圖像處理、圖像分析與處理、目標定位等功能[15-16]。為減少環境因素的干擾,打開照明進行補光,其工作流程如圖8 所示。
同時利用該裝置基于openmv 傳感器進行單目測距,根據圖像攝取的物體焦距、物體離地面的高度及障礙物在水平面的位置,通過光學原理測定障礙物的距離,即攝像頭與引導目標靶的距離[17-18]。單目視覺測距工作原理示意圖如圖9 所示。
圖9 中,AX和BX為openmv 攝像頭的成像,Hm和Rm為障礙物(引導目標靶)的實際值,由幾何公式推導可得測距為:
2.4 電磁炮發射流程
電磁炮發射首先將電磁炮發射裝置12 V 電壓逆變提升為200 V 電壓,STM32 微處理器采集電容組的電壓控制繼電器。當充電到設定值時,啟動繼電器1,對電容組充電。當電磁炮瞄準目標或確定目標距離時,微處理器啟動繼電器2 打開晶閘管,電容組為電磁炮感應線圈供電,發射子彈[19-20]。電磁炮發射裝置控制流程如圖10 所示。
3 系統測試分析
系統測試分為手動控制模式和自動模式,環形靶放置離實驗裝置距離在200~300 cm 之間,與中心軸線偏離角度為θ(-45°≤θ≤45°),文中主要測試系統的精準度和穩定性。在手動模式下,不斷改變目標靶與實驗裝置的距離和偏航角,每個輸入參數測量10 組數據,記錄落點的位置,統計平均誤差,得到數據如表1 所示。在自動模式下,不斷改變靶心的距離值和靶心偏航角,每個輸入參數值測量10 組數據,測量并記錄落點位置的同時,記錄目標靶跟蹤的時間,統計平均誤差和跟蹤時間的平均時間,得到的數據如表2 所示。
從表1 數據發現,手動模式的平均誤差約為1.41 cm,精準度較高,穩定性強。在自動瞄準模式下,目標距離的選擇有200 cm、230 cm、270 cm、300 cm,距離在相同值下,目標值從-45°開始到45°,每次增加30°,記錄并計算落點的平均誤差和跟蹤時間,從表2數據發現,自動模式的平均環數為8.66 環,平均誤差為1.34 環,平均跟蹤環數為8.60 環。從表1、表2 分析得知,該系統的射擊精準度高、穩定性強,自動跟蹤性能良好,具有較好的魯棒性。

表1 手動模式測試數據記錄表
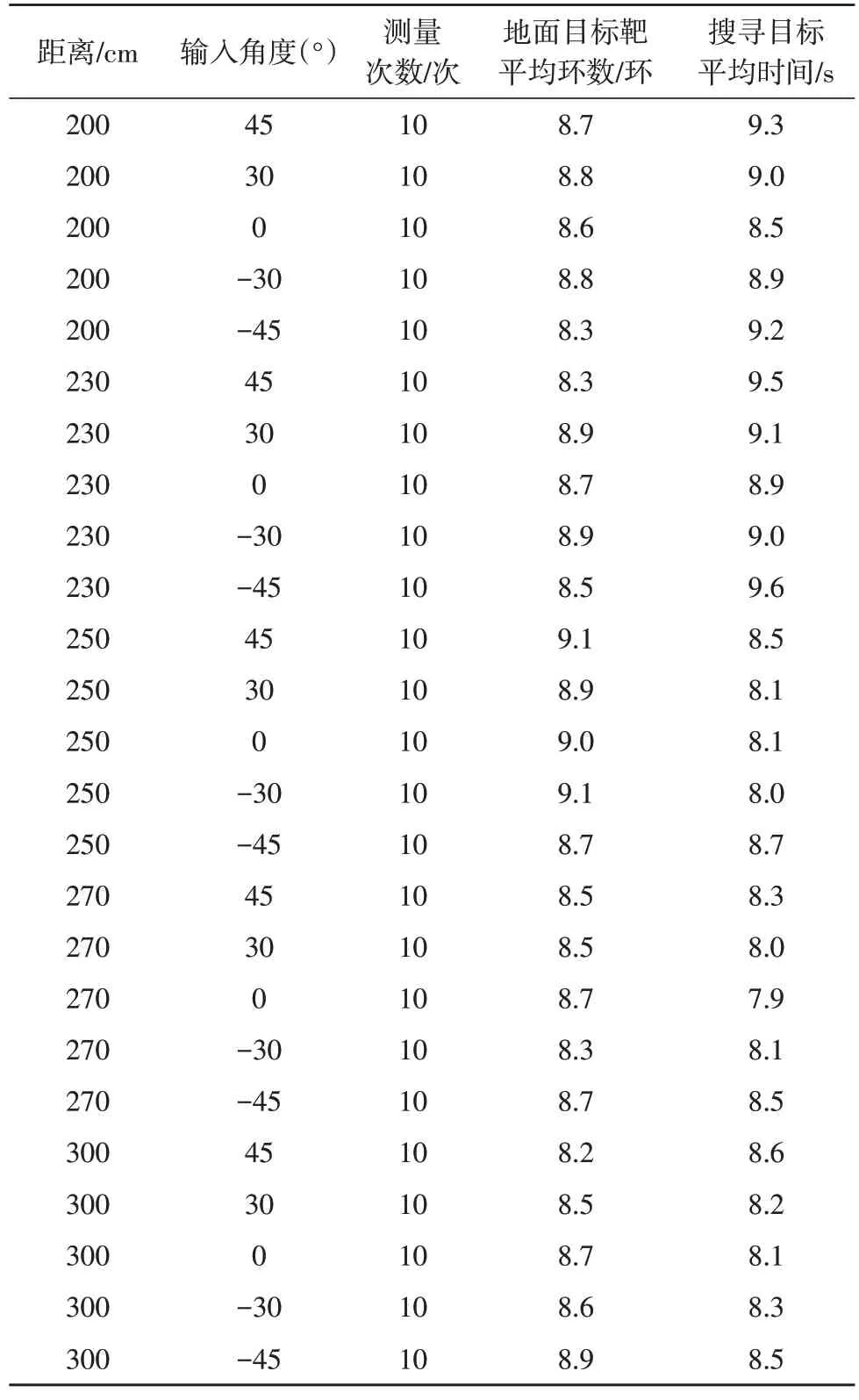
表2 自動模式測試數據記錄表
4 結論
該文研究了電磁炮系統總體的結構設計,建立了子彈發射模型、以運動導體所受洛倫茲力為基礎,按照電磁炮的最大有效射程及最大設計射速為依據,計算設計儲能電容、線圈,控制充放電電流及充放電時間,充分利用openmv 識別與測距方面的優勢,并將其嵌入到STM32F103 微處理器中,實現了云臺角度控制、電磁炮發射控制、目標識別與跟蹤等功能。經設計、組裝、調試,采用手動、自動兩種模式分別對系統進行現場測試,其中手動模式整體的平均誤差約為1.41 cm、自動模式下的平均環數為8.66環,平均跟蹤環數為8.60 環。測試結果表明,該系統能夠快速對引導靶物體進行跟蹤并測量出兩者之間的距離,調整云臺的偏航角控制射擊裝置,利用儲能電容充放電實現電磁炮自主打靶,具有較高的射擊精準度和魯棒性。該電磁炮的成功研制,為新型電磁炮的研究提供了新的設計方法和思路。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
