有源電力濾波器的滯環SVPWM電流控制研究
2022-11-18 10:34:04馮怡菲陳忠孝
中國新技術新產品 2022年16期
關鍵詞:指令
馮怡菲 陳忠孝
(西安工業大學,陜西 西安 710021)
0 前言
隨著各項技術的發展,電力行業的設備逐漸被智能設備替代,越來越多的電力電子器件應用再電力系統的各個方面。在電力系統中有源電力濾波器是用于諧波抑制的裝置。在整個諧波抑制過程中,最重要的環節是指令電流跟蹤,影響整個設備的諧波抑制效果。為此,該文利用傳統滯環控制與 SVPWM 控制的優勢,對滯環 SVPWM 控制法進行研究[1]。
1 有源電力濾波器原理及模型
1.1 APF的工作原理
有源電力濾波器APF是目前治理諧波最有效的裝置,APF具有動態抑制諧波、快速跟蹤各類諧波電流以及補償無功功率的作用[2-3]。
APF的工作原理如圖1所示。APF一般由信號調理檢測、指令電流計算、功率開關驅動和APF主電路4個部分組成:1)信號調理檢測模塊是實時檢測三相電網系統的電壓電流,并將其采集到的數據經調理電路輸出為用于數字信號處理器所能處理的數字信號。2)指令電流計算模塊是將采集到的諧波電流信號轉換為與其大小相等、方向相反的指令電流信號。3)功率開關驅動模塊是根據電流跟蹤控制算法跟蹤指令電流信號,得到補償信號,進而驅動開關。4)APF主電路是由功率開關器件組成的,通過開關管產生抑制系統諧波的補償電流。
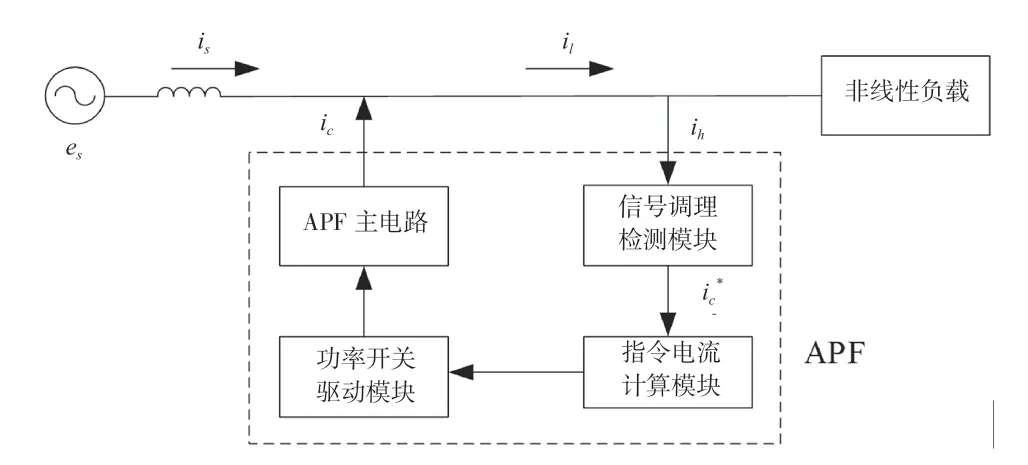
圖1 并聯型APF工作原理
其具體工作原理如下:先利用APF中的信號調理檢測模塊檢測到的諧波電流ih,再由指令電流計算模塊得到指令電流,根據諧波電流跟蹤控制算法獲取產生補償電流的控制信號,控制電子開關器件,產生補償電流。APF抑制諧波的原理是檢測電力系統中的諧波電流,經過處理得到指令電流,通過控制算法跟蹤指令電流,產生PWM脈沖信號,控制器件產生補償電流,達到諧波抑制的效果[4]。
1.2 APF的數學模型
三相三線制有源電力濾波器的電路結構的本質上是一個三相三線PWM電壓源型變換器[5]。建立數學模型前,將逆變器三相的開關函數定義為Sa、Sb、Sc,以Sa為例,如公式(1)所示。

式中:Sa為三相逆變器A相的開關函數。
APF的數學模型如公式(2)所示[6]。
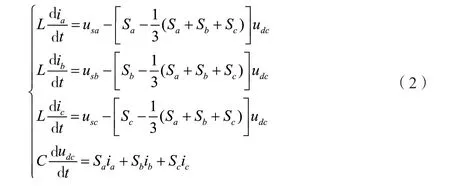
式中:L為補償電路的電感;C為變流器側儲能元件;ia、ib、ic為APF的補償電流;usa、usb、usc為三相電網中的三相相電壓;Sa、Sb、Sc為三相逆變器的開關函數;udc為系統中APF直流側電容的電壓。
2 滯環控制與SVPMW控制
滯環SVPWM控制是傳統的滯環電流跟蹤控制算法與SVPWM電壓空間矢量控制算法的結合[6],下面先分別介紹這兩種控制方法,分析其優、缺點,再闡述滯環SVPWM控制法的原理。
2.1 滯環電流跟蹤控制
滯環控制的原理框圖如圖2所示,將指令電流i*c與實際電流ic相減,得到誤差電流Δic,經過滯環比較器,與設定的環寬值進行比較,生成相應的PWM信號,使APF輸出電流跟蹤指令電流[7]。該方法的優點是控制原理簡單,但是控制精度是由環寬值決定的。如果環寬值較大,跟蹤指令電流產生的補償電流誤差大,APF抑制諧波的效果會變差;如果環寬值較小,就會提高跟蹤指令電流的響應速度,同時提高諧波抑制效果,但是高的響應速度會提高電子器件的頻率,長期使用會縮短其使用壽命,因此選擇適當的環寬值很重要。目前,根據經驗選取環寬值。
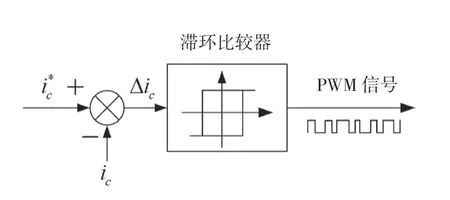
圖2 滯環比較控制方法原理框圖
2.2 電壓空間矢量控制SVPWM
SVPMW控制法如圖3所示,選取參考電壓矢量u*ref,利用該矢量相鄰的2個非零電壓矢量和零電壓矢量合成電壓矢量,不斷逼近參考電壓矢量[8]。
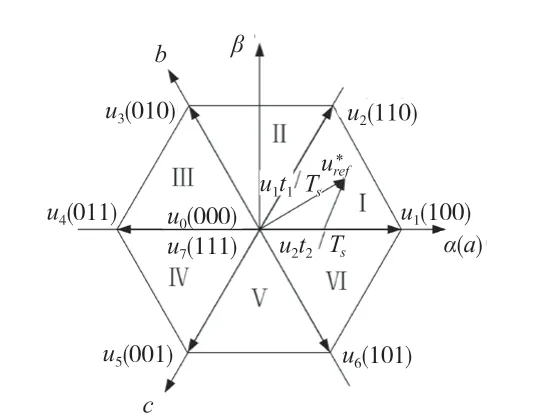
圖3 參考電壓矢量分區及合成矢量圖
該方法優點是電子器件的頻率低,控制精度高,但是算法實現復雜,成本會相應提高。該文基于以上對滯環比較控制和SVPWM控制法的原理及優、缺點,闡述滯環SVPWM控制法的原理。
2.3 滯環SVPMW控制的原理
滯環SVPWM控制原理如公式(3)所示。

式中:L為補償電路的電感;Δi為誤差電流矢量;為參考電壓矢量;uk為逆變器交流側空間電壓矢量。
因此,滯環SVPWM控制的原理可描述如下:根據有源濾波器的輸入量,對參考電壓矢量和誤差電流矢量Δi進行選取;根據公式(3)即可找到最優的空間電壓矢量uk,此時誤差電流矢量的變化率最小,APF跟蹤指令電流的精度最高,抑制諧波的效果最好;再推導出開關邏輯,進而控制主電路開關管的通斷,輸出補償電流。綜上所述,可將滯環SVPWM控制分為4個環節,即參考電壓矢量的選擇、誤差電流矢量Δi的選擇、最優空間電壓矢量uk的選擇和開關管控制邏輯。下面將針對這4個環節詳細說明。
3 滯環SVPWM控制的4個環節
該節將分別對滯環SVPWM控制的4個環節詳細分析[9],并針對4個環節中的參考電壓矢量選取的判斷進行改進。
3.1 參考電壓矢量的選擇
參考電壓矢量區域如圖4所示。對參考電壓矢量所在區域的判斷,可根據有源電力濾波器交流測輸出的參考線電壓的正負,確定參考電壓所在的區域。例如,如果0,參考電壓矢量就落在Ⅳ區。

圖4 參考電壓區域
因此,采用相間誤差電流矢量Δiab、Δibc、Δica的正負極性來確定參考電壓矢量。例如,當Δiab>0、Δibc>0、Δica<0時,可得 到此時應屬于區域Ⅰ。同理,可得出其他狀態下參考電壓矢量uref*所處區域,見表1。
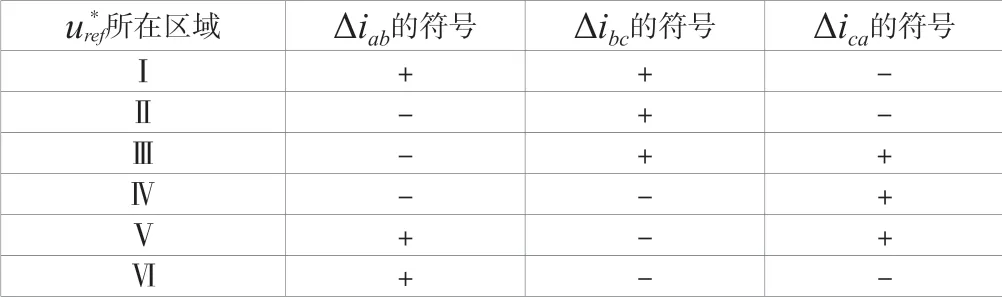
表1 參考電壓矢量uref*的區域判斷表
3.2 誤差電流矢量的選擇
誤差電流矢量所在區域如圖5所示。
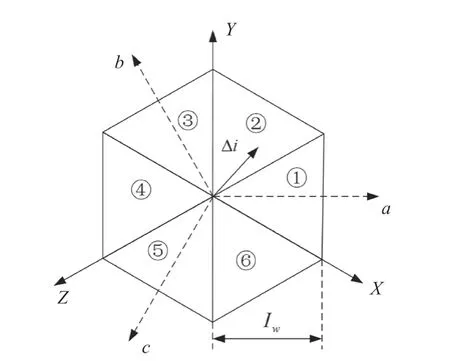
圖5 誤差電流區域
誤差電流矢量所在區域的判斷為先得到abc軸上的投影,然后再對得到的3個電流符號進行判斷,進而確定誤差電流所在的區域。例如,Δia>0,Δib>0,Δic<0,可判斷出Δi在區域②。同理,得到的誤差電流矢量所在區域表,見表2。
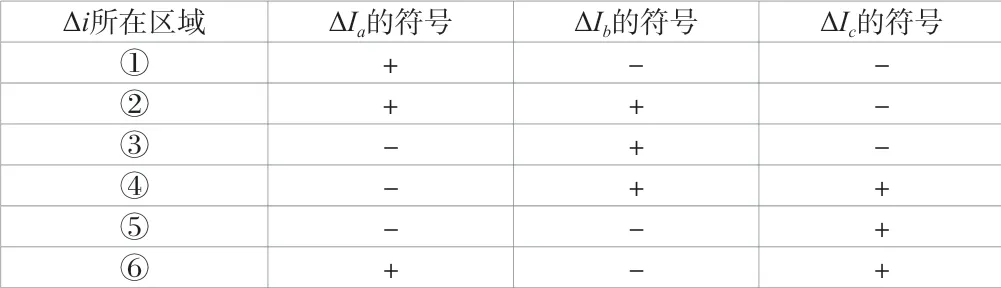
表2 判斷誤差矢量Δi所在區域表
3.3 最優空間電壓矢量的選擇
當參考電壓和誤差電流確定后,根據公式(3)可知,對指令電流的精確跟蹤程度與誤差電流矢量的模值|Δi|成反比。由此可知,誤差電流的變化率dΔi/dt要與誤差電流矢量Δi方向相反,需要在滿足此條件的多個空間電壓矢量中選擇最優的一個空間電壓矢量。下面為選擇最優電壓矢量的基本原則[10]如下:1)當誤差電流模值小于等于環寬值時,保持原來的輸出電壓。2)當誤差電流模值大于環寬值時,此時應選擇使誤差電流的變化率要與誤差電流矢量方向相反的輸出電壓矢量,且得到的模值須為最小。如圖6所示,如果參考電壓矢量位于Ⅰ區,當誤差電流矢量Δi位于②區時,根據以上選取的基本原則,以ui(i=0,1...7)的終點為起點,指向作矢量,就可以得到公式(3)。由圖6可知,只有u2滿足最優空間矢量的選取原則。最優空間電壓矢量選擇的基本原則見表3。
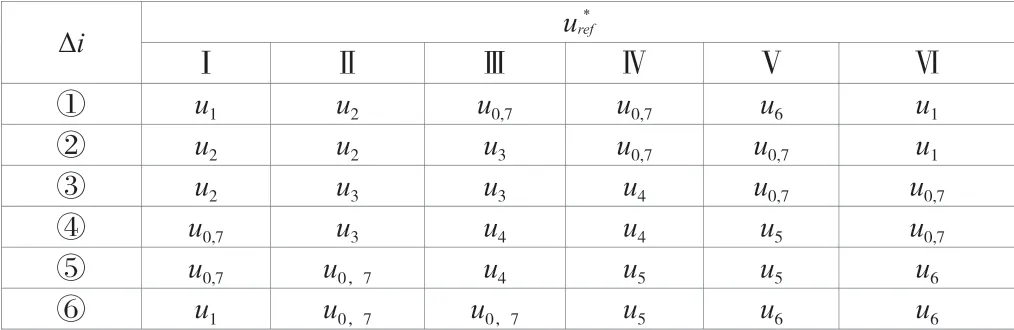
表3 最優空間電壓矢量uk的選取
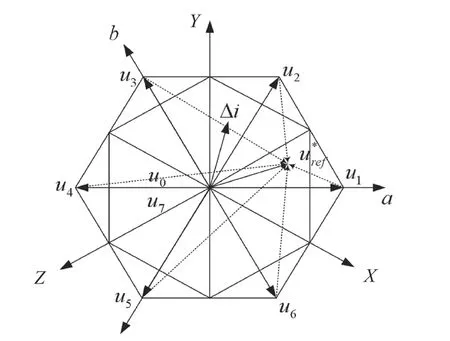
圖6 空間電壓矢量選擇示意圖
3.4 開關管控制邏輯
根據上述內容得到控制各開關管的開關邏輯。當Sa=1時,u1、u2、u6為最優的空間電壓矢量uk值;當Sb=1時,u2、u3、u4為最優uk值;當Sc=1時,u4、u5、u6為最優uk值。同理,得到各開關管的開關邏輯如公式(4)所示。
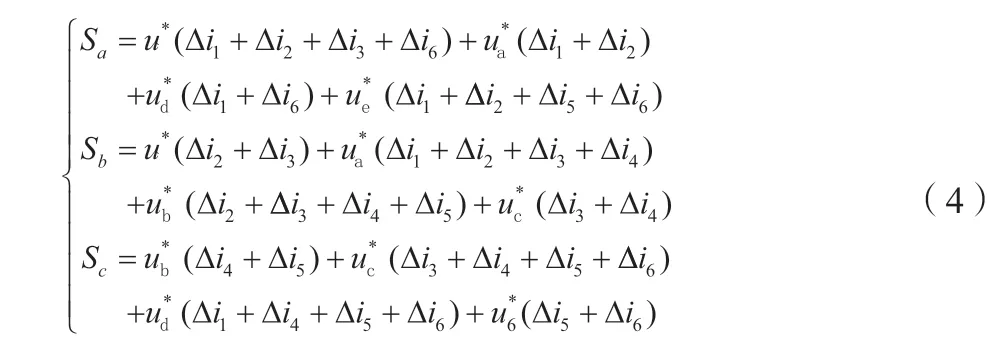
式中:ui*(i=Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ,Ⅵ)為參考空間電壓矢量u* ref所在區域i;Δij(j=1,2,3,4,5,6)為誤差電流矢量Δi所在區域j,j與①~⑥相對應。
4 仿真試驗分析
根據上述分析,在Simulink中建立基于滯環SVPWM控制法的APF模型。以非線性負載作為單諧波源進行仿真,A相諧波源的電流波形如圖7(a)所示,諧波畸變率為24.46%;經傳統滯環SVPWM控制法進行諧波治理后的電流波形如圖7(b)所示,諧波畸變率降至6.75%;經改進后的滯環SVPWM控制法治理后的諧波電流如圖7(c)所示,諧波畸變率為3.49%。因此,改進后的滯環SVPWM控制法降低了諧波電流的畸變率,諧波補償效果明顯,提高了動態性能。
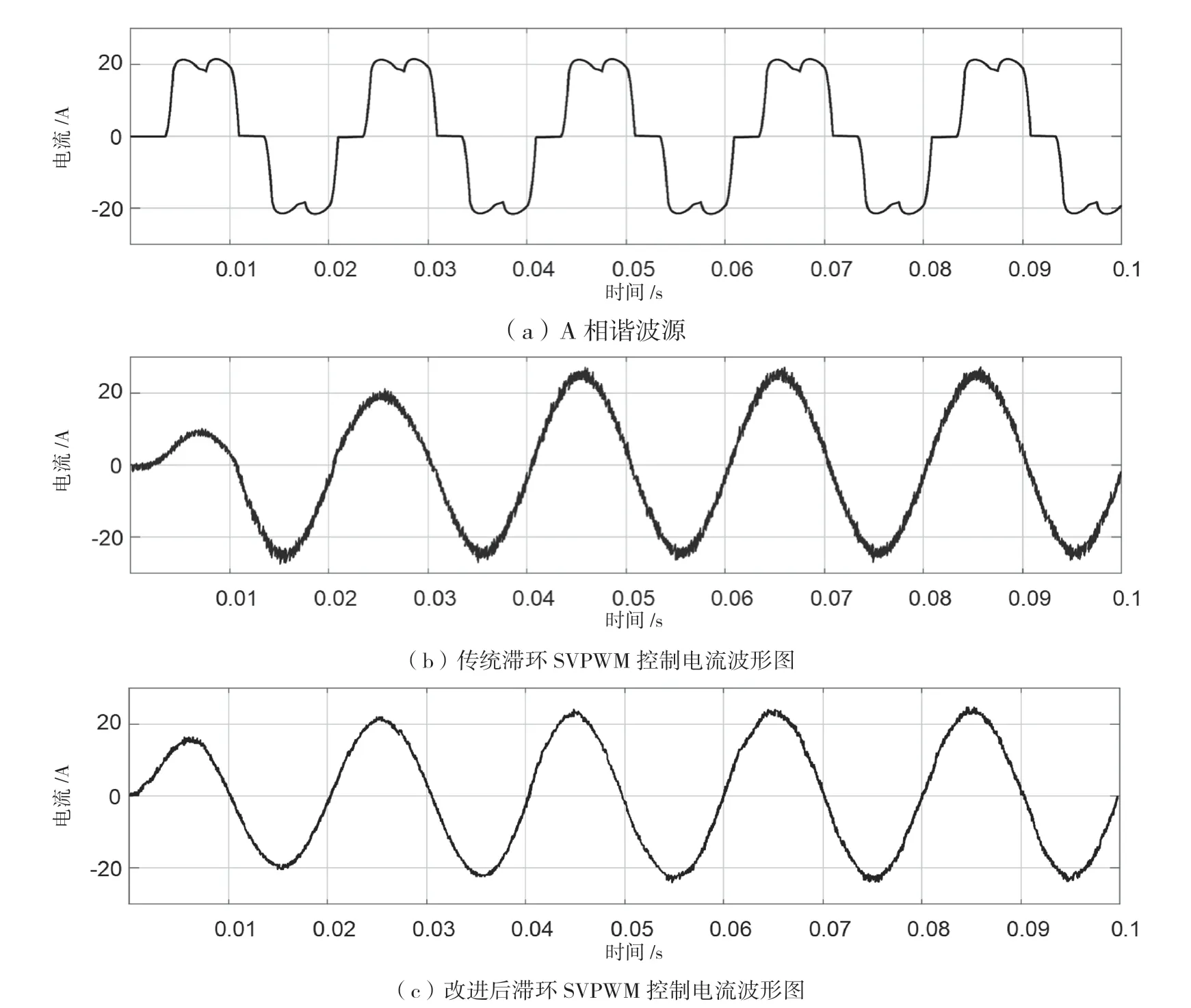
圖7 仿真結果對比圖
5 結語
該文對應用于電力系統中抑制諧波的裝置,有源電力濾波器的控制方法進行研究。介紹了有源濾波器的工作原理與數學模型,分析了滯環控制與電壓空間矢量控制的原理及優缺點,闡述了滯環SVPWM控制的原理以及該算法的4個環節,主要針對其中的參考電壓矢量的選擇進行改進,最后,在Simulink環境下的仿真對比結果表明,改進后的算法對APF治理諧波具有較好的穩態跟蹤能力及響應速度。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27