基于圖像和點(diǎn)云的路面缺陷檢測(cè)研究
2022-11-18 10:36:58馮首道
中國(guó)新技術(shù)新產(chǎn)品 2022年16期
關(guān)鍵詞:檢測(cè)
施 洋 馮首道 曹 遠(yuǎn)
(中國(guó)人民解放軍32127部隊(duì),遼寧 大連 116600)
0 引言
面對(duì)我國(guó)龐大的公路網(wǎng)絡(luò),對(duì)路面缺陷進(jìn)行人工檢測(cè)已經(jīng)無(wú)法滿足檢測(cè)需求,不僅耗時(shí)耗力,而且還存在因各種因素影響而無(wú)法保證精準(zhǔn)度的問(wèn)題,同時(shí)存在極大的安全隱患。自21世紀(jì)初,隨著三維掃描技術(shù)及相關(guān)采集設(shè)備的發(fā)展,基于點(diǎn)云的路面缺陷檢測(cè)方法得到廣泛認(rèn)可[1]。
隨著數(shù)字圖像處理技術(shù)、激光雷達(dá)技術(shù)、紅外深度圖像技術(shù)及CCD攝像等技術(shù)的發(fā)展推動(dòng)了路面缺陷檢測(cè)設(shè)備的快速發(fā)展[2]。2008年哈工大與國(guó)暢智能交通技術(shù)有限公司共同研發(fā)了道路檢測(cè)車,該檢測(cè)車屬于多功能應(yīng)用型監(jiān)測(cè)車,可檢測(cè)路面的粗糙程度,其標(biāo)準(zhǔn)基本達(dá)到國(guó)際領(lǐng)先水平。隨著檢測(cè)設(shè)備的發(fā)展,國(guó)內(nèi)外學(xué)者相繼提出基于圖像和點(diǎn)云的優(yōu)秀算法,用以檢測(cè)路面缺陷[3]。
通過(guò)設(shè)備采集的路面點(diǎn)云數(shù)據(jù)和圖像數(shù)據(jù),使用基于圖像特征的路面裂縫檢測(cè)以及基于點(diǎn)云的路面坑槽和涌包檢測(cè)方法,并以點(diǎn)云形式修復(fù)檢測(cè)出的缺陷。具體研究?jī)?nèi)容如下:1)研究設(shè)備采集數(shù)據(jù)的2種方式和《公路技術(shù)狀況評(píng)定標(biāo)準(zhǔn)》(JTG 5210—2018)對(duì)路面缺陷的分類及破損評(píng)級(jí)標(biāo)準(zhǔn)。2)對(duì)路面裂縫圖像進(jìn)行預(yù)處理、裂縫區(qū)域增強(qiáng)以及裂縫區(qū)域分割等處理,準(zhǔn)確檢測(cè)路面裂縫及相關(guān)裂縫幾何信息計(jì)算。
1 路面缺陷數(shù)據(jù)采集方法和缺陷評(píng)定標(biāo)準(zhǔn)
1.1 路面缺陷數(shù)據(jù)采集方法
所需數(shù)據(jù)由實(shí)驗(yàn)室車載移動(dòng)測(cè)量系統(tǒng)中激光掃描儀與線陣相機(jī)采集生成。通過(guò)激光傳感器不間斷地掃描路面,從而獲取路面的三維點(diǎn)云數(shù)據(jù),通過(guò)線陣相機(jī)獲取路面的圖像數(shù)據(jù),2種不同的數(shù)據(jù)采集方式可根據(jù)不同類型的路面缺陷進(jìn)行選取。
1.2 路面缺陷分類與采集方式
根據(jù)《公路技術(shù)狀況評(píng)定標(biāo)準(zhǔn)》(JTG 5210—2018)可以將路面缺陷分為裂縫類、涌包類和坑槽類。
1.2.1 裂縫類
路面裂縫類缺陷主要是受材料和路基的填料、氣候等因素的影響,其表現(xiàn)為路面表面出現(xiàn)橫向、網(wǎng)狀等裂縫。
由于裂縫寬度過(guò)窄,且裂縫深度存在不確定性,因此使用線陣相機(jī)采集的裂縫圖像信息能清晰反應(yīng)裂縫特征。
1.2.2 涌包類
路面涌包類缺陷主要是因路面老化而導(dǎo)致的,熱脹冷縮或在外力作用下易出現(xiàn)路面涌包。
由于涌包表現(xiàn)為路面鼓起,缺陷區(qū)域有明顯現(xiàn)象,因此通過(guò)路面涌包點(diǎn)云可以看出,適合采用激光掃描儀采集點(diǎn)云數(shù)據(jù)。
1.2.3 坑槽類
路面坑槽形成主要是因路面厚度不足或有水份侵入而導(dǎo)致的,表現(xiàn)為部分下沉或出現(xiàn)坑洼現(xiàn)象。
由于坑槽區(qū)域點(diǎn)云數(shù)據(jù)的高程值明顯小于路面其他區(qū)域的高程值,因此應(yīng)使用激光掃描儀采集其點(diǎn)云數(shù)據(jù)。
2 基于圖像特征的路面裂縫檢測(cè)
2.1 路面裂縫圖像預(yù)處理
對(duì)圖像進(jìn)行預(yù)處理,最大程度地簡(jiǎn)化圖像數(shù)據(jù)的同時(shí),去除圖像數(shù)據(jù)中的噪聲干擾,提高裂縫圖像的可檢度,圖像預(yù)處理主要包括圖像去噪和圖像增強(qiáng)2個(gè)部分。
2.1.1 圖像去噪
2.1.1.1 圖像灰度校正
在圖像中時(shí)常出現(xiàn)不均勻光照的現(xiàn)象,灰度值的不穩(wěn)定導(dǎo)致難以區(qū)分圖像中的裂縫和背景,使裂縫檢測(cè)不精確,給路面裂縫提取帶來(lái)困難。為使圖像數(shù)據(jù)的光照分布均衡,可以利用局部閾值對(duì)不均勻光照進(jìn)行補(bǔ)償。
2.1.1.2 去除圖像陰影
路旁的燈桿、樹(shù)木和建筑物在光照條件會(huì)形成倒影,容易將陰影區(qū)誤認(rèn)為路面裂縫缺陷,給檢測(cè)帶來(lái)困難。為去除陰影,該小節(jié)采用最大最小濾波的方法,其原理是將中心像素值與鄰域內(nèi)像素值進(jìn)行比較,如果中心像素比鄰域內(nèi)像素最小值小,或者比最大值大,則用鄰域內(nèi)像素的最小值或最大值代替中心像素。
2.1.1.3 高斯—中值濾波去噪
高斯濾波的原理是經(jīng)加權(quán)平均后,獲取圖像每點(diǎn)像素值和鄰域內(nèi)其他點(diǎn)像素值,對(duì)服從正態(tài)分布的噪聲有較好的過(guò)濾效果,能夠保持圖像的整體細(xì)節(jié);中值濾波法將圖像劃分為多個(gè)正方形區(qū)域,以正方形內(nèi)的像素中值代替該區(qū)域的像素值,對(duì)裂縫圖像的邊緣起到很好的保護(hù)作用,但是它會(huì)使正體圖像變得模糊。綜合高斯濾波與中值濾波,基于各自優(yōu)點(diǎn)實(shí)現(xiàn)裂縫圖像噪聲濾除。圖像中像素點(diǎn)的灰度值與其相鄰像素點(diǎn)的灰度值是非常接近的,裂縫區(qū)域的灰度值比其背景灰度值要低,如果一個(gè)像素點(diǎn)的灰度值小于或遠(yuǎn)大于相鄰點(diǎn)的灰度值,則該像素點(diǎn)很可能是噪聲。
2.1.2 圖像增強(qiáng)
該文使用灰度拉伸進(jìn)行裂縫圖像增強(qiáng),如公式(1)所示。
式中:f(x,y)為經(jīng)去噪后圖像的灰度值;g(x,y)為灰度拉伸后的圖像灰度值。
根據(jù)裂縫圖像實(shí)際情況,將灰度等級(jí)劃分為[0,x1]、[x1,x2]和[x2,255],將灰度值位于[x1,x2]的圖像拉伸至[y1,y2],這樣其他區(qū)域的灰度值將被降低,從而達(dá)到抑制噪聲的效果。
2.2 路面裂縫圖像分割
圖像分割技術(shù)作為圖像處理中的核心步驟,在路面裂縫圖像檢測(cè)中有非常重要的作用,常用方法主要基于閾值、邊緣等。該文將結(jié)合圖像的閾值分割和邊緣分割方法并加以改進(jìn)。
2.2.1 Canny邊緣檢測(cè)算法
Canny算子對(duì)裂縫圖像邊緣檢測(cè)有較好的準(zhǔn)確性,具體步驟如下:1)按照上文的高斯濾波方法對(duì)圖像進(jìn)行去噪,設(shè)原圖像為f(x,y),濾波處理后的圖像為h(x,y)。2)計(jì)算梯度的幅值和方向。采用Canny算法計(jì)算像素在2×2鄰域內(nèi)的水平與垂直方向上的偏導(dǎo)數(shù)。3) 抑制非極大值的梯度幅值。在Canny邊緣檢測(cè)算法中,抑制非極大值的梯度幅值,可以找到梯度幅值最大的像素點(diǎn),通過(guò)該方法去除絕大部分裂縫邊緣之外的點(diǎn)。4)設(shè)定雙閾值確定裂縫邊緣像素點(diǎn)。Canny算法設(shè)置一高一低2個(gè)閾值,高閾值一般是低閾值的2倍,用于遍歷所有像素點(diǎn)。比較邊緣像素的梯度值和設(shè)置的高低閾值,如果梯度值大于高閾值,則該像素點(diǎn)為邊緣強(qiáng)像素點(diǎn),像素值為255;如果梯度值介于高低閾值之間,則該像素點(diǎn)為邊緣弱像素點(diǎn),像素點(diǎn)值暫先不變;如果梯度值小于低閾值,則被抑制,像素值為0,可根據(jù)圖像內(nèi)容合理選取閾值。
2.2.2 基于邊緣檢測(cè)的自適應(yīng)閾值分割方法
在抑制非極大值的梯度幅值后,可以得到三類邊緣候選點(diǎn)數(shù)據(jù),令第一類候選點(diǎn)為C1,表示裂縫圖像中非邊緣點(diǎn),包括梯度值為{t1,t2,…,ta}的像素;令第二類候選點(diǎn)為C2,表示裂縫圖像不確定的邊緣點(diǎn),包括梯度值為{ta+1,ta+2,…,tb}的像素;令第三類候選點(diǎn)為C3表示裂縫圖像中邊緣點(diǎn),包括梯度值為{tb+1,tb+2,…,tL}的像素。
當(dāng)裂縫圖像有M個(gè)像素時(shí),令梯度幅值范圍為[1,L],則梯度值為ti對(duì)應(yīng)的像素個(gè)數(shù)為mi,那么占總像素?cái)?shù)的比例可為則各類的均值和概率如公式(2)~公式(3)所示。
裂縫圖像類間方差如公式(4)所示。

針對(duì)裂縫圖像,通過(guò)梯度直方圖可求得ti、Pi,將梯度等級(jí)設(shè)置為64個(gè)等級(jí),便可得出關(guān)于a、b的二元二次函數(shù),a的取值區(qū)間為[1,L],b的取值區(qū)間為[a,L],通過(guò)搜索類間方差σ2(a,b)最大值對(duì)應(yīng)的ta、tb的值,則ta、tb就是C1、C2和C3各類區(qū)間的分界點(diǎn),這樣就可以自適應(yīng)的確定Canny邊緣檢測(cè)算法中的高、低閾值。
Canny邊緣檢測(cè)算法對(duì)裂縫邊緣有較好的檢測(cè)效果。結(jié)合它們各自的優(yōu)點(diǎn),疊加2種方法獲取的結(jié)果,即可獲得邊緣信息完整且噪聲較小的裂縫圖像分割結(jié)果,具體步驟如下:1)利用分割裂縫圖像得到噪聲較少的二值化圖像h1。2)利用改進(jìn)后Canny邊緣檢測(cè)算法分割裂縫圖像,得到具有裂縫邊緣信息圖像h2。3)由于圖像h1白色代表背景像素,黑色代表裂縫像素,因此為保證圖像h1跟圖像h2的背景和裂縫像素顏色一致,將圖像h1灰度值反轉(zhuǎn),標(biāo)記為圖像h3。4)對(duì)應(yīng)圖像h2和圖像h3檢測(cè)出來(lái)的裂縫邊緣像素點(diǎn),疊加圖像h3與圖像h2,標(biāo)記為圖像h4,所得到的圖像h4即滿足2種算法的各自優(yōu)點(diǎn)。
2.2.3 連通域去噪和斷裂區(qū)域連接
通過(guò)應(yīng)用形態(tài)學(xué)中的閉運(yùn)算和開(kāi)運(yùn)算,閉運(yùn)算消除圖像中微小間斷和排除小型孔洞,開(kāi)運(yùn)算消除多余毛刺,綜合連通域去噪及形態(tài)學(xué)上開(kāi)閉運(yùn)算操作,得到最終的裂縫圖像分割結(jié)果。
2.3 路面裂縫圖像檢測(cè)
2.3.1 裂縫類別判斷
裂縫圖像經(jīng)過(guò)圖像分割后,需要對(duì)其進(jìn)行特征提取,因?yàn)閷?duì)裂縫的不同種類有不同的評(píng)定標(biāo)準(zhǔn),所以要先對(duì)圖像中的裂縫進(jìn)行類別判斷。該文采用連通域數(shù)量分析的方法判斷圖像中裂縫是線性裂縫還是網(wǎng)狀裂縫。裂縫連通域個(gè)數(shù)如圖1所示。
通過(guò)試驗(yàn)可知,線性裂縫與網(wǎng)狀裂縫在連通域數(shù)量上存在較大差異,對(duì)很多路面裂縫圖像進(jìn)行試驗(yàn)分析后,將連通域數(shù)量閾值設(shè)定為5,當(dāng)裂縫連通域數(shù)量小于5時(shí),判定為線性裂縫,當(dāng)裂縫連通域數(shù)量大于或等于5時(shí),判定為網(wǎng)狀裂縫。
可以采用投影法判斷橫向裂縫和縱向裂縫,分別對(duì)線性裂縫圖像向X軸與Y軸方向上進(jìn)行投影,通過(guò)投影結(jié)果進(jìn)行區(qū)分,如圖2所示。
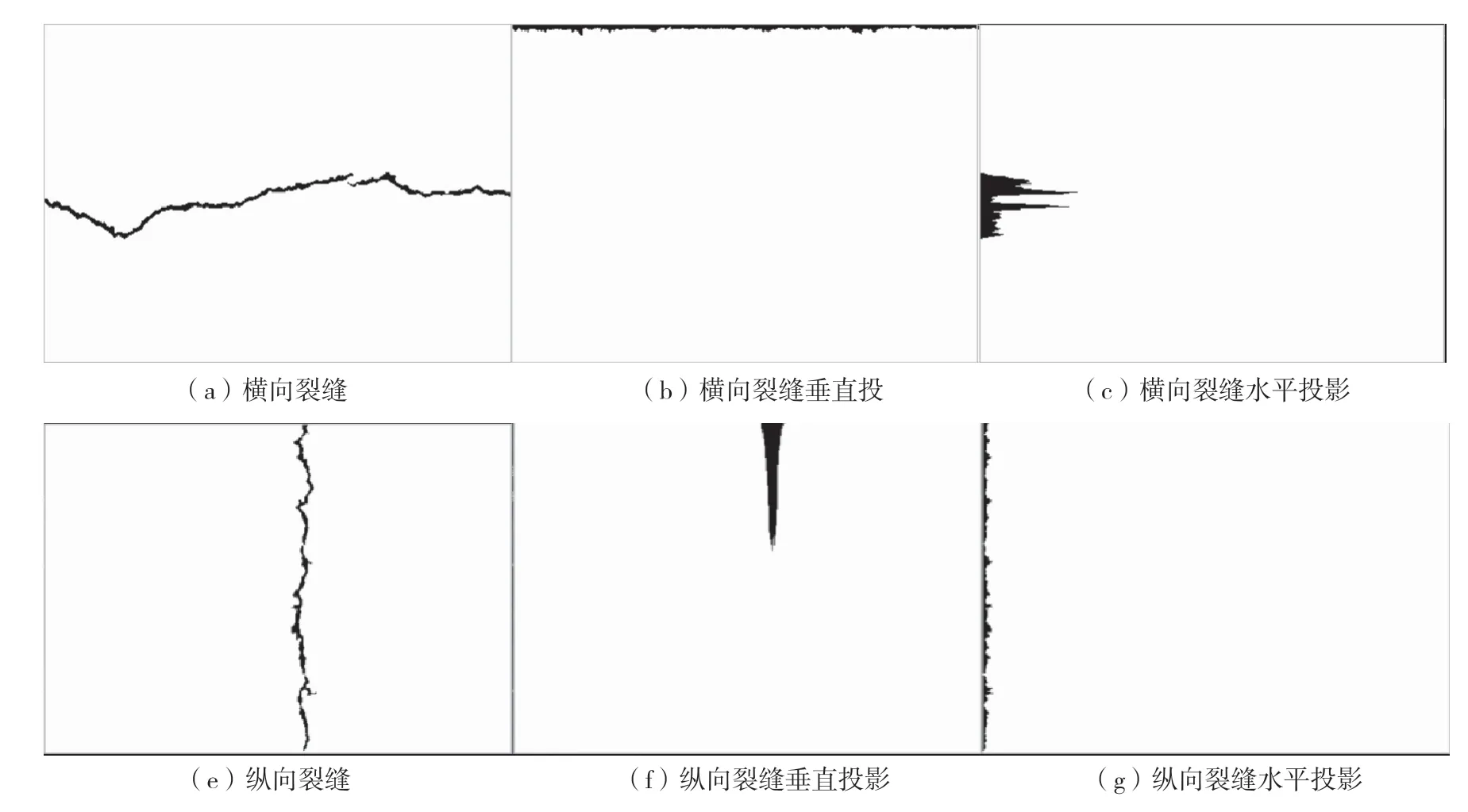
圖2 橫向裂縫和縱向裂縫判斷示意圖
綜上可知,目標(biāo)范圍內(nèi)像素點(diǎn)為裂縫,橫向裂縫水平方向的投影最大值點(diǎn)清晰并數(shù)值相對(duì)較大,波動(dòng)劇烈,垂直方向的投影圖形相對(duì)比較平緩、峰值小且遍布很均勻;縱向裂縫圖像特征與之相反。
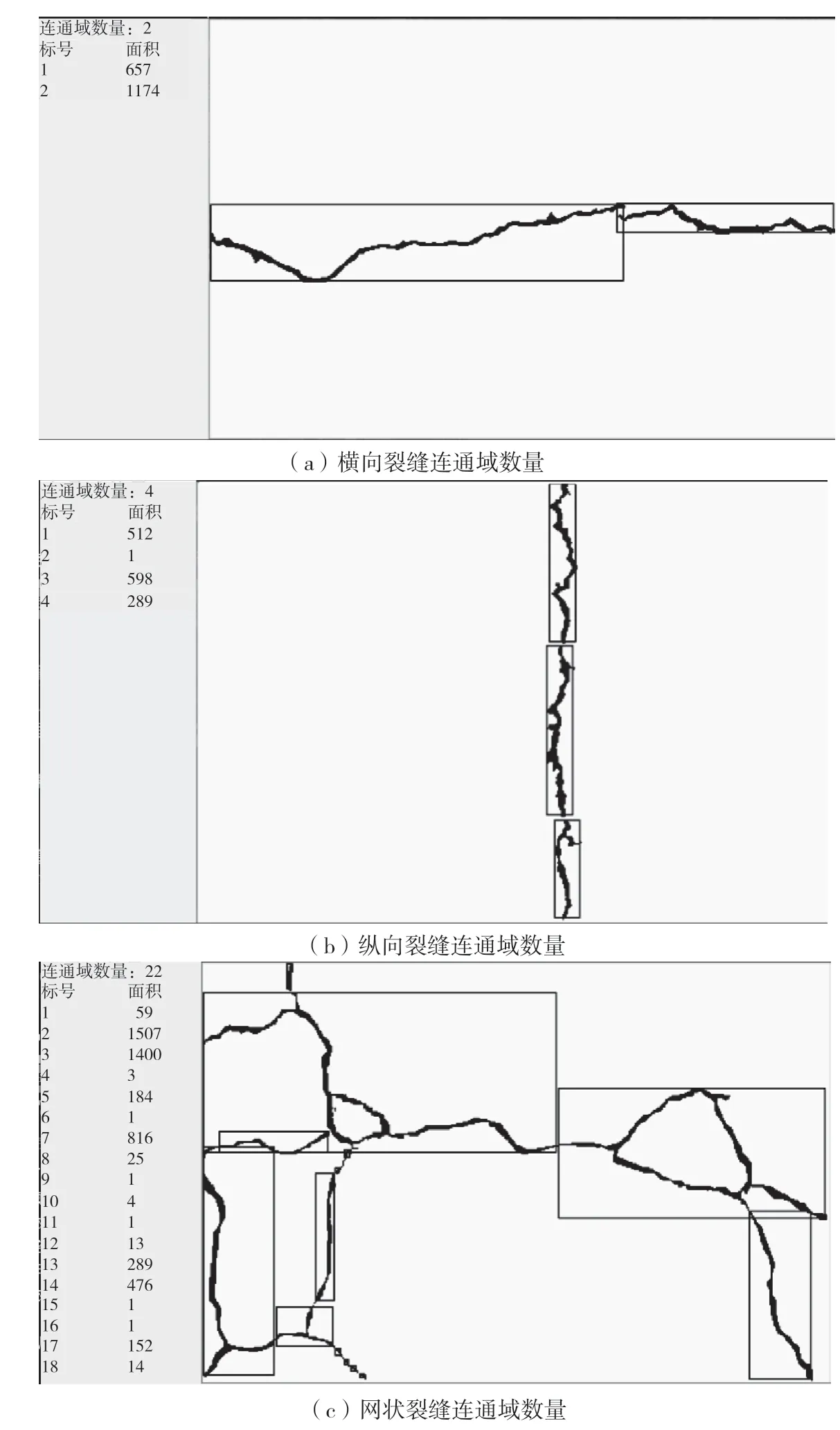
圖1 線性裂縫和網(wǎng)狀裂縫判斷示意圖
2.3.2 線性裂縫長(zhǎng)度和寬度計(jì)算
裂縫長(zhǎng)度和寬度是評(píng)估裂縫損壞程度的2個(gè)重要指標(biāo),裂縫長(zhǎng)度反映裂縫的延伸狀況,裂縫寬度反映裂縫的開(kāi)裂程度。
2.3.2.1 骨架細(xì)化
對(duì)裂縫圖像進(jìn)行骨架細(xì)化,提取裂縫圖像的中心像素輪廓,細(xì)化為單像素寬度,骨架提取時(shí)要滿足以下3個(gè)要求:1) 骨架不能出現(xiàn)斷裂。2) 裂縫內(nèi)部像素點(diǎn)不可刪除。3) 不可刪除像素端點(diǎn),刪除端點(diǎn)會(huì)導(dǎo)致整條裂縫骨架被刪除。
Zhang Suen細(xì)化算法是一種經(jīng)典的細(xì)化算法,擁有較高的細(xì)化精度和較快的運(yùn)行速度,應(yīng)用范圍較廣,該文利用該算法進(jìn)行裂縫骨架細(xì)化,如圖3所示。
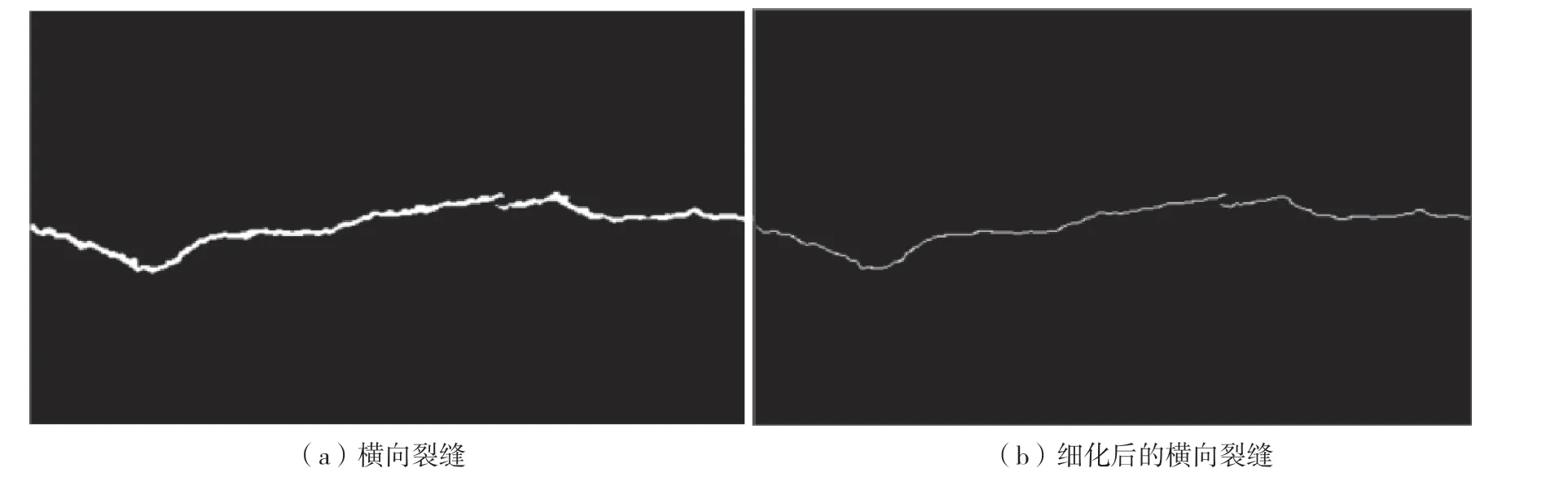
圖3 裂縫細(xì)化效果圖
2.3.2.2 裂縫長(zhǎng)度計(jì)算
細(xì)化后的裂縫骨架均為單一像素,即每行每列只有一個(gè)像素值,只要求取骨架長(zhǎng)度即為裂縫的長(zhǎng)度。骨架長(zhǎng)度可以理解為相鄰像素點(diǎn)之間的距離之和,令(xi,yi)和(xi+1,yi+1)為相鄰像素,則相鄰像素點(diǎn)之間的距離之和l如公式(5)所示。

裂縫骨架總長(zhǎng)度為L(zhǎng),即所有相鄰像素距離之和如公式(6)所示。

2.3.2.3 裂縫寬度計(jì)算
根據(jù)《公路技術(shù)狀況評(píng)定標(biāo)準(zhǔn)》(JTG 5210—2018)可知,裂縫的最大寬度是影響結(jié)構(gòu)損傷和使用極限的重要因素,因此需要求取的裂縫寬度應(yīng)該為裂縫兩邊緣像素上的最大距離。該文采用邊界點(diǎn)切垂線法來(lái)計(jì)算裂縫最大寬度。
具體計(jì)算方法如下:1)首先遍歷裂縫圖像,設(shè)裂縫左邊界點(diǎn)p的坐標(biāo)為(xa,ya)。2)確定與p相鄰的上、下行的左邊界點(diǎn),分別記為(xb,yb)和(xc,yc),則這3點(diǎn)可以確定拋物線y=ax2+bx+c,計(jì)算該拋物線在點(diǎn)P處切線斜率k。3)設(shè)與點(diǎn)p切線的垂線如公式(7)所示。

垂線相交于右邊界點(diǎn)的坐標(biāo)為(xd,yd),則(xa,ya)和(xd,yd)之間距離d即為點(diǎn)p處裂縫的寬度,如公式(8)所示。

采用邊界點(diǎn)切垂線法即可獲得裂縫圖像最大寬度dmax。
2.3.3 網(wǎng)狀裂縫面積計(jì)算
該文通過(guò)獲得裂縫圖像凸包的方法,可以更接近網(wǎng)狀裂縫的面積。具體方法主要基于Opencv進(jìn)行操作,首先,提取分割好的路面網(wǎng)狀裂縫圖像。其次,使用Opencv的convexHull函數(shù)獲取圖像裂縫區(qū)域的凸包。最后,同樣使用Opencv中的convexArea函數(shù)獲取裂縫圖像凸包面積S,則圖像中網(wǎng)狀裂縫分布面積即為S×a2。
2.4 采集結(jié)果與分析
基于該章節(jié)對(duì)路面裂縫圖像的處理方法,通過(guò)線陣相機(jī)采集和交通部發(fā)布的路面裂縫圖像數(shù)據(jù)進(jìn)行檢測(cè),線性裂縫長(zhǎng)、寬單位為mm,網(wǎng)狀裂縫面積單位為m2,試驗(yàn)結(jié)果見(jiàn)表1。

表1 裂縫分類結(jié)果統(tǒng)計(jì)表
路面裂縫類型的判定是路面裂縫檢測(cè)的基礎(chǔ),對(duì)其幾何特征參數(shù)的計(jì)算是路面裂縫檢測(cè)的關(guān)鍵評(píng)價(jià)指標(biāo),為驗(yàn)證該文所提出的算法的有效性,在線性裂縫與網(wǎng)狀裂縫中隨機(jī)挑選6 幅,根據(jù)該文計(jì)算路面裂縫幾何特征方法進(jìn)行分析比較,結(jié)果見(jiàn)表2~表4。其中,線性裂縫長(zhǎng)度為L(zhǎng),最大寬度為W,網(wǎng)狀裂縫的面積為S。
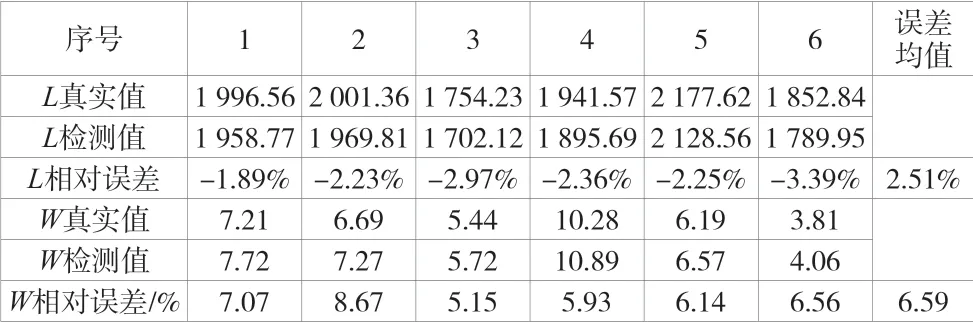
表2 橫向裂縫檢測(cè)結(jié)果表
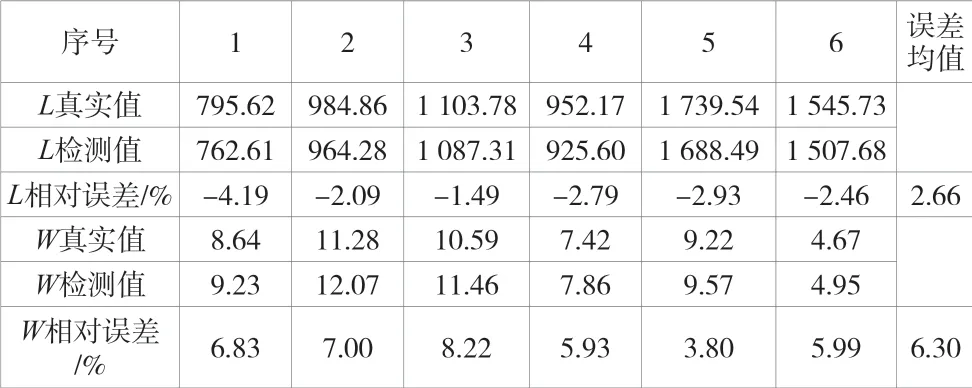
表3 縱向裂縫檢測(cè)結(jié)果表
通過(guò)對(duì)裂縫圖像試驗(yàn)結(jié)果分析發(fā)現(xiàn):1)在對(duì)線性裂縫長(zhǎng)度的檢測(cè)中,相對(duì)誤差為負(fù)值,說(shuō)明檢測(cè)值小于實(shí)際值,這是因?yàn)樵诹芽p骨架提取時(shí),雖然保證了裂縫的基本形狀,但是每行每列只提取單個(gè)像素點(diǎn),所以導(dǎo)致整體長(zhǎng)度稍受影響。2)在對(duì)線性裂縫最大寬度的檢測(cè)中,相對(duì)誤差為正值,說(shuō)明檢測(cè)值大于實(shí)際值,因?yàn)殚]運(yùn)算可以將微小間斷和細(xì)小孔洞與裂縫相連接,導(dǎo)致檢測(cè)裂縫最大寬度的偏移會(huì)增大。3)在對(duì)網(wǎng)狀裂縫面積的檢測(cè)中,相對(duì)誤差為負(fù)值,說(shuō)明檢測(cè)值小于實(shí)際值,因?yàn)榫W(wǎng)狀裂縫的部分細(xì)小裂縫分支,灰度值接近圖像背景,在獲取凸包時(shí)沒(méi)有將該部分檢測(cè)出來(lái),所以導(dǎo)致網(wǎng)狀裂縫面積檢測(cè)值小于真實(shí)數(shù)值。

表4 網(wǎng)狀裂縫檢測(cè)結(jié)果表
3 結(jié)語(yǔ)
該文圍繞基于圖像和點(diǎn)云的路面缺陷檢測(cè)及點(diǎn)云修復(fù)技術(shù)進(jìn)行研究,所取得的主要研究成果如下:1)該文研究了車載移動(dòng)測(cè)量系統(tǒng)采集路面缺陷的2種數(shù)據(jù)形式,即圖像和點(diǎn)云,然后根據(jù)《公路技術(shù)狀況評(píng)定標(biāo)準(zhǔn)》(JTG 5210—2018)對(duì)路面缺陷進(jìn)行分類和破損分級(jí),結(jié)合實(shí)際路面缺陷特征選擇合適的采集方式。2)提出基于圖像特征的路面裂縫檢測(cè)。通過(guò)改進(jìn)高斯與中值濾波的方法,在去除大量噪聲的同時(shí),保留更多裂縫邊緣細(xì)節(jié),Canny邊緣檢測(cè)算法根據(jù)路面裂縫缺陷的評(píng)定標(biāo)準(zhǔn)對(duì)其幾何特征進(jìn)行分析。
在后續(xù)研究中還須解決以下問(wèn)題:檢測(cè)精度問(wèn)題。無(wú)論從圖像還是點(diǎn)云進(jìn)行檢測(cè),受到設(shè)備抖動(dòng)、環(huán)境以及人為等因素的干擾對(duì)檢測(cè)精度有較大影響,還需進(jìn)一步對(duì)相關(guān)檢測(cè)算法進(jìn)行研究。
猜你喜歡
中國(guó)設(shè)備工程(2022年12期)2022-07-11 04:33:00
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:36
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年9期)2019-11-25 07:34:34
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2019年12期)2019-05-21 02:53:48