基于離散時間反饋的閉環MEMS加速度計研究
2022-11-17 14:01:18孫志遠
世界地震工程 2022年4期
孫志遠,王 淼
(1.中國地震局工程力學研究所地震工程與工程振動重點實驗室,黑龍江哈爾濱 150080;2.地震災害防治應急管理部重點實驗室,黑龍江哈爾濱 150080;3.黑龍江省水利科學研究院,黑龍江哈爾濱 150050)
引言
近年來,隨著工藝和技術的發展,MEMS加速度計的性能有了很大的提高,達到了與傳統的力平衡式加速度計相當的性能指標,使其在地震監測中的應用成為可能[1]。在地震數據采集中,其噪聲和線性性能主要考慮的是:由于地震監測是基于對捕捉到的波形進行分析,因此這些性能越好,越能正確的反應發震時刻以及震相等特征[2]。電容式MEMS加速度計主要分為開環工作模式和閉環工作模式,開環工作模式的優點是接口電路容易實現,只需要電容變化檢測電路即可,其缺點是線性度較差,典型值在0.01~0.001之間[3]。由于微加速度計需要保證一定線性度,因此其機械表頭的靈敏度設計較低,無法實現較高的信噪比。此外,開環工作電路需采用高通濾波器,當環境溫度變化引起濾波器參數變化,必然導致傳感器解調相位發生變化,從而產生微加速度計零位輸出及刻度因子的漂移[4]。閉環型加速度計通過靜電力反饋控制改善其線性度,且將機械擺的開環靈敏度設計成較大值,可顯著提高加速度計的信噪比[5],偏置穩定性也有較大程度的提高。閉環微加速度計高靈敏度的敏感結構所帶來的非線性及低帶寬,通過閉環靜電力伺服控制予以克服,所以靜電力閉環微加速度計是MEMS加速度計發展的必然趨勢[6-7]。
本文針對現代地震監測和石油勘探等領域需求,提出一種基于離散時間反饋的閉環MEMS加速度計整體量測方案。結合分時復用和相關雙采樣技術,在對其進行靜態和動態特性分析的基礎上,合理調整反饋電路參數,實現電荷放大和反饋控制信號的雙向調節,利用二次采樣電路對量測系統的整體噪聲進行信號整形并消除直流偏移,達到加速度計高穩定性和高精度測量的目的。
1 系統結構
本文提出的基于離散時間反饋的閉環MEMS加速度計測量系統如圖1所示。系統包括電容器補償陣列,開關電容器前置電荷放大器(CSA),相關雙采樣(CDS)和PID控制電路。基于離散時間反饋加速度計結構是通過分時復用靜電反饋原理,即利用調節開關電容設定閾值完成分步執行功能。微機械加速計接口ASIC芯片通過數字時序電路控制模擬開關S6和S8的輪流通斷,從而分時完成電容變化檢測及靜電力反饋。CSA與頂部和底部電極連接,用于將平衡電橋結構的電荷信號轉換為放大的電壓信號,CDS電路被用來消除運算放大器的閃爍噪聲和偏移[8]。真空封裝微加速度計由于系統欠阻尼,響應時間較長,無法正常應用。因此后續電路采用PID電路進行調整,加大系統阻尼,使加速度計阻尼系數在0.7左右[9]。
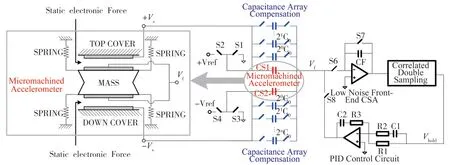
圖1 閉環微加速度計系統原理圖Fig.1 System architecture of closed-loop micro accelerometer
2 閉環微機械加速度計靜態和動態特性分析
由于所用的閉環加速度計系統工作原理為分時反饋原理,因此采用時域分析方法來分析閉環系統的動態特性及靜態特性。微加速度計的工作時序原理如圖2所示。
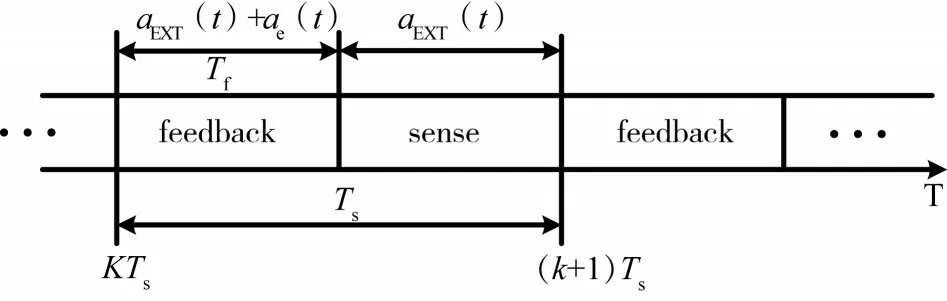
圖2 閉環反饋控制時序圖Fig.2 Control schedule of closed-loop feedback
2.1 靜態特性分析
閉環微加速度計采用的是PID靜電力反饋方式,在微加速度計處于靜態時,由加速度信號引起的外力與微加速度計反饋靜電力綜合引起的加速度計質量塊位移變化為0,即公式(1)所示:

微加速度計的靜態刻度因子可通過式(1)確定:

當靜電力反饋時間與周期相同時,分時反饋成為連續時間靜電力反饋,其刻度因子為:

此時刻度因子僅與靜態電容容值,力矩器電壓、質量塊質量和極板間距有關。
與連續時間靜電力反饋相比,采用分時靜電力反饋方案的刻度因子與靜電力反饋時間、系統阻尼有關,采用表1敏感結構參數,計算Tf/Ts、機械結構阻尼與微加速度計刻度因子的關系分別如圖3-4所示,微加速度計的靜電力反饋時間占空比通過數字時鐘精確分頻控制,當環境溫度變化導致的振蕩器周期Ts發生變化時,Tf/Ts并不發生變化。此外根據如圖3所示,Tf/Ts應該設計到接近1處,從而更大程度上保證刻度因子穩定性。如圖4所示,刻度因子對機械敏感結構阻尼變化敏感,隨著Tf/Ts的增大,其敏感程度逐漸降低。根據上述特性,提高靜電力反饋時間占空比Tf/Ts,即可提高系統刻度因子穩定性,此外選取較大阻尼系數的微機械敏感結構有助于提高刻度因子穩定性。
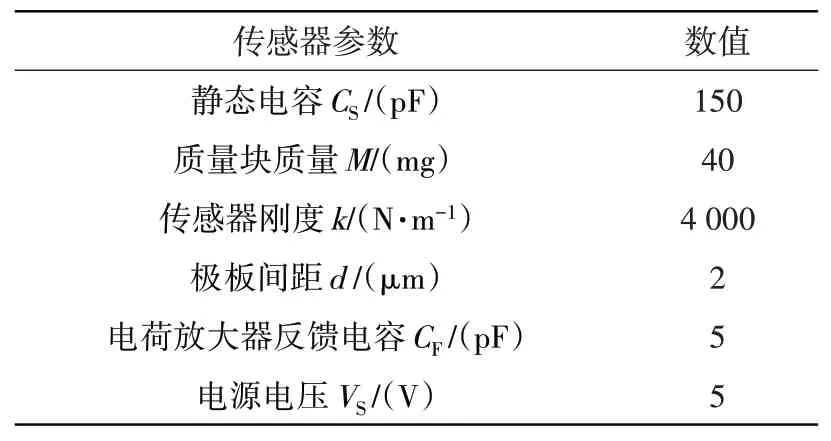
表1 電容式微加速度計表頭及電路參數Table 1 Capacitive micro-accelerometer and circuit parameters
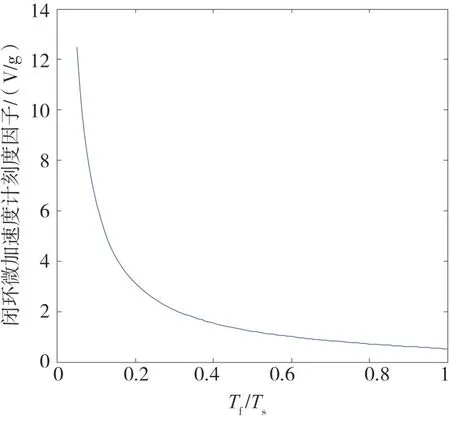
圖3 Tf/Ts與閉環微加速度計刻度因子關系Fig.3 Relationship between Tf/Ts and closed-loop micro-accelerometer scale factor
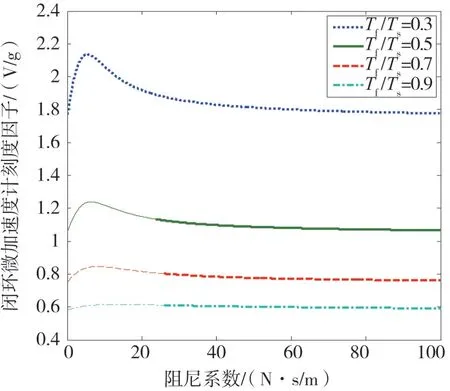
圖4 微機械結構阻尼與閉環微加速度計刻度因子關系Fig.4 Relationship between MEMS Structural damp and the closed-loop micromachined accelerometer scale factor
2.2 動態特性分析
若假定靜電力反饋與電荷敏感是連續時間函數,則采用的閉環反饋控制電路的傳遞函數為:

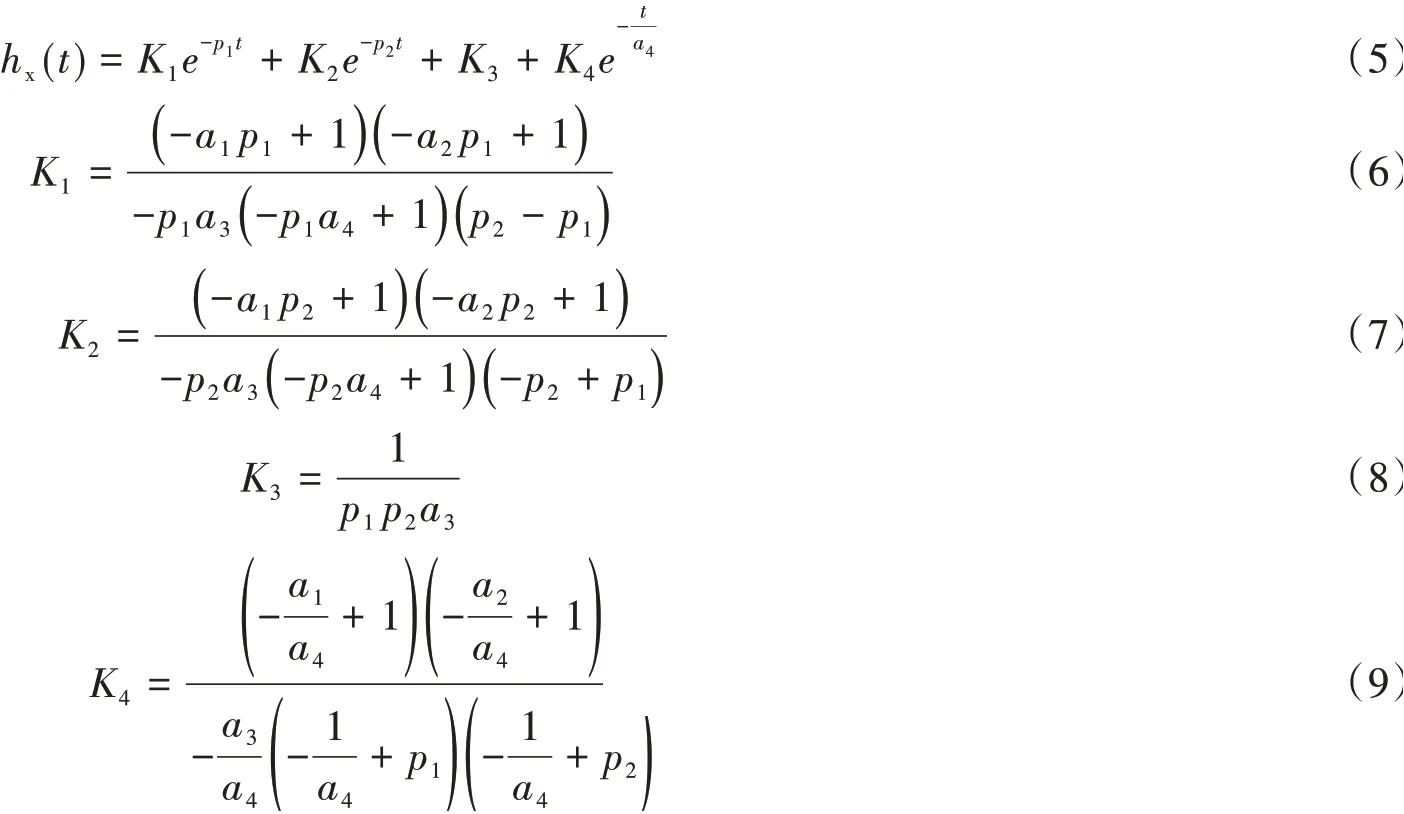
R1~R3,C1和C2為PID反饋控制電路參數,如圖1所示。該敏感結構對應電壓Vhold的沖擊響應函數為:
由圖5所示結果可知:真空封裝微加速度計由于系統欠阻尼,響應時間較長,無法正常應用。采用閉環分時反饋原理的微加速度計方法由于采用PID電路參數調整,增加系統電阻尼,使閉環微機械加速度計接近臨界阻尼。

圖5 微機械加速計開環、閉環工作模式階躍響應對比圖Fig.5 Step response comparison of open-loop,closed-loop mode of MEMS
3 離散時間反饋工作原理
電容式微加速度計接口ASIC芯片原理如圖6所示,利用CMOS開關電容合理控制時鐘順序,按照電荷檢測和靜電力反饋輪詢方式完成力平衡電容微加速度計的工作過程,提高系統的整體檢測能力。芯片整個工作周期T包括4個工作模式:放大器噪聲采集模式(T1)、放大器連通模式(T2)、信號采樣模式(T3)、靜電力反饋模式(T4)。設定系統時鐘頻率為250 kHz,其中靜電力反饋所用的時間長度為2μs,占空比為1/2。利用開關電容電路中的二次相關雙采樣技術有效降低電荷放大器的閃爍低頻噪聲、電荷注入和時鐘饋通等非理想因素,引入PID反饋控制調節系統阻尼和剛度,并對系統進行補償以便提高穩定性。開關電容電路的工作時序如圖7所示,測量系統依此順序循環執行,完成電容式微加速度計的閉環反饋協同工作過程。

圖7 ASIC芯片中主要模擬開關工作原理圖Fig.7 Main switching schematic in ASIC chip
圖6為微機械加速度計開關電容電路工作原理圖,其中:+Vs和-Vs分別為機械表頭電容的正負參考電壓。為了提高前端放大器檢測能力,本文采取給表頭電容并聯補償電容的方法,加大等效的電容值。但是較大的靜態電容值會降低測量系統線性度,并影響輸出電壓的分辨率,因此本文中的補償電容約為40 pF。開關電容器前置放大電路中運算放大器的帶寬需要進行優化設計,不僅要盡量減少因構建過于復雜造成的系統誤差,也要防止因帶寬過小形成的混疊效應。同時,為了提高閉環的穩定性將選取較大的積分電容,而如果放大電路要符合高精度輸出,則需要選取較小的積分電容容值[10-11],通過調節參數,將積分電容Cr值設定為10 pF。因此,通過計算得到運放帶寬fu的設置要求,如式(10)所示。


圖6 微機械加速度計開關電容電路工作原理圖Fig.6 Switched-capacitor circuit diagram of MEMS accelerometer
在T1模式時,放大器前端的總噪聲信號由偏置電壓Vn和低頻噪聲兩部分組成,因此放大器反向端Vx的總電荷量為:

在T2模式時,開關S7形成斷路,此時放大器處于連通狀態。此時放大器反向端Vx引入的電荷量為:

開關S8處于導通狀態,則電容器Cc將電荷放大器A1的輸出噪聲電壓進行存儲,Vy端點電荷總量為:

在T3模式時,加速度計機械表頭電容CS1和CS2的驅動端分別接地,此時端點Vx的電荷總量不發生改變,則端點Vx的電荷總量可表示為:

根據公式(13),計算得出放大器輸出電壓Vout為:

在該工作模式下開關S8為斷開狀態,此時電容CC上電荷量不變,關系式為:

式中:Vy的電壓值為:

此時二次雙采樣輸出電壓Vy已消除放大器的閃爍噪聲、電容開關S7的電荷傳入以及時鐘控制電路引起的耦合電荷,隨后Vy將被保持到采樣電容CH中。
在T4模式時,電容開關S6和開關S9斷路,S10導通,經過雙采樣噪聲消除的電壓Vhold通過PID電路進行調節。調節后電壓反饋加載至機械敏感結構電容輸入端,進而實現表面靜電力反饋。此時電容檢測電路已與靜電力反饋電路通過開關S6和開關S9完全隔離,不存在驅動信號對檢測信號的耦合現象,無需連續時間電路中的高階高通濾波器,避免由于濾波器參數變化帶來的解調輸出誤差。
4 實驗結果
MEMS加速度計接口ASIC電路芯片采用0.5μm CMOS高低壓集成電路工藝,芯片面積4.0mm×4.0mm。機械表頭采用真空封裝微機械加速度計表頭,并進行ASIC芯片的綜合性能測試(見圖8)。

圖8 MEMS加速度計測試封裝圖Fig.8 MEMS accelerometer package photograph
MEMS加速度計機械表頭、接口ASIC芯片以及兩部分匹配后的測試結果見表2,測試結果表明該種結構的MEMS加速度計具備極高的噪聲整形功能,在測量方面可以實現小于μg的加速度噪聲密度。微加速度計頻響測試如圖9所示,其有效帶寬大于500 Hz,且具有較高的帶內平坦度。微加速度計的輸出噪聲通過動態分析儀HP35670A測試,其測試結果如圖10所示。測試結果說明基于離散時間反饋原理的開關電容式接口ASIC芯片的可以實現MEMS加速度計的靜電力閉環工作。該電路可以達到與傳統力平衡式傳感器相當的性能,所提出的基于離散時間交錯和CDS技術具有良好的降噪功能。
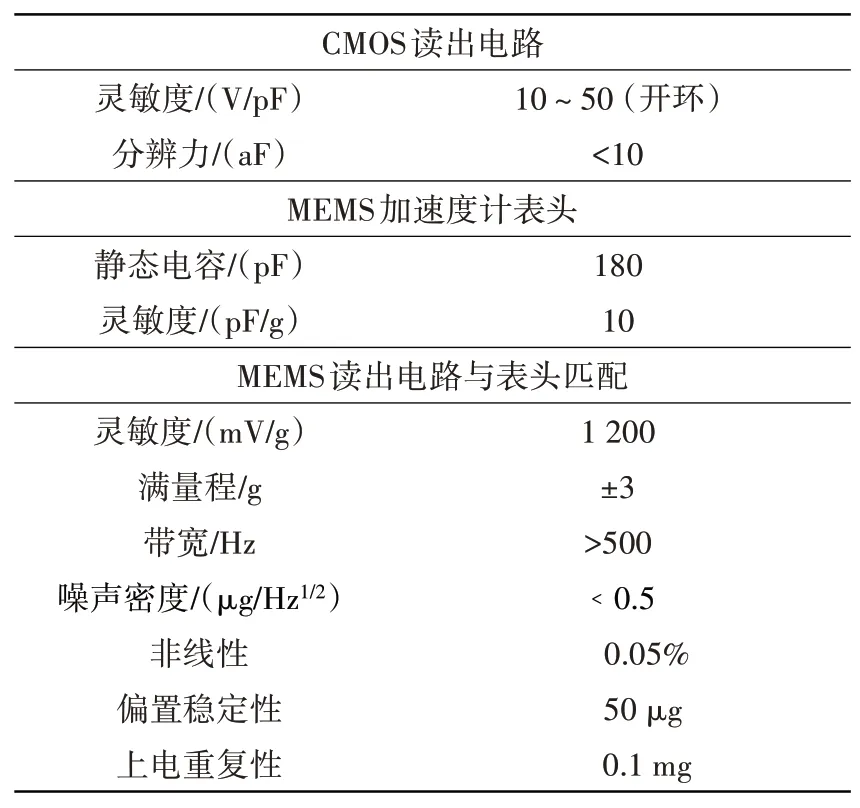
表2 微加速度計接口ASIC與表頭綜合測試結果Table 2 Comprehensive test results of micro-accelerometer ASIC and sensor
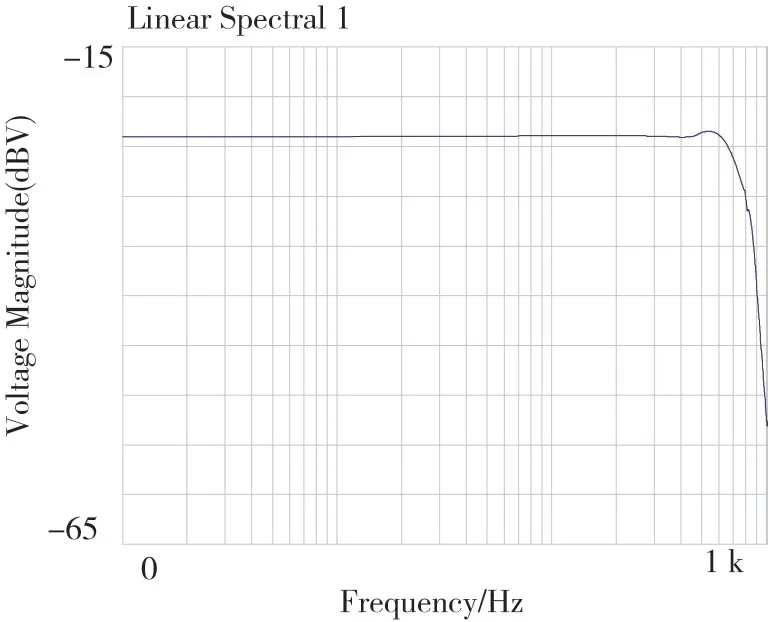
圖9 閉環微加速度計頻響測試曲線Fig.9 Frequency response testing curve of Closed-loop micro-accelerometer
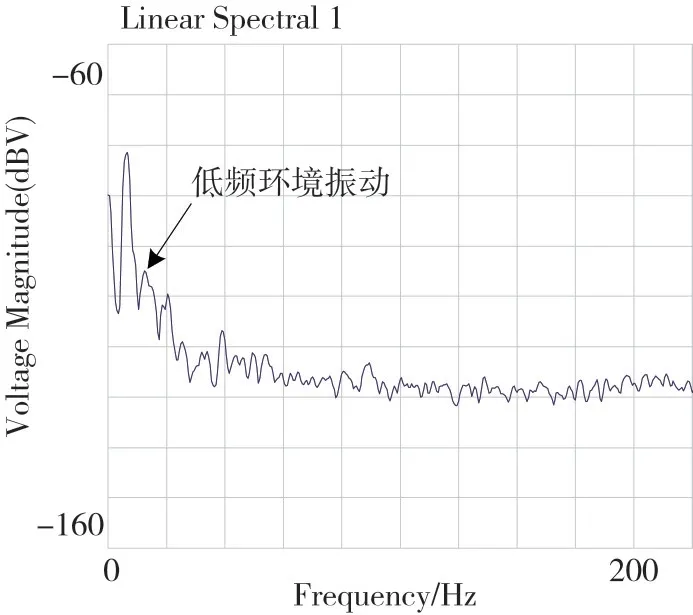
圖10 閉環微加速度計噪聲頻譜測試曲線Fig.10 Noise spectrum testing curve of closed-loop micro-accelerometer
5 結語
針對現有振動測量對加速度計穩定性和分辨力等性能要求,本文設計了一種基于離散時間反饋的閉環MEMS加速度計。在分析微加速度計閉環靜態和動態特性的基礎上,采用開關電容電路實現分時復用功能,采用相關雙采樣電路消除運算放大器的閃爍噪聲和失調,以及PID控制電路等方法提高傳感器的測量精度、使用頻帶和阻尼等指標。測試結果表明:其有效帶寬大于500 Hz,并且該儀器在頻帶內噪聲譜密度小于0.5μg/Hz1/2。