改進YOLOv3算法的遙感圖像道路交叉口自動識別
2022-11-15 01:57:34邵小美張春亢韋永昱張顯云周成宇張忠豪
航天返回與遙感 2022年5期
邵小美 張春亢 韋永昱 張顯云 周成宇 張忠豪
改進YOLOv3算法的遙感圖像道路交叉口自動識別
邵小美1張春亢1韋永昱1張顯云1周成宇2張忠豪1
(1 貴州大學礦業學院,貴陽 550025)(2 31626部隊,廣州 510800)

YOLOv3 道路交叉口 目標檢測 空間金字塔池化 注意力機制 遙感應用
0 引言
隨著遙感影像空間分辨率的不斷提高,遙感影像中道路交叉口特征結構受到周圍自然場景(車輛、建筑物、植被等)的影響越來越大。道路交叉口是構成道路網絡的基礎與核心要素,起到了連接道路和承載轉向的重要作用[1]。因此,研究如何從高分辨率遙感圖像中對道路交叉口進行有效、快速、智能的檢測就具有非常重要意義。
近年來,國內外學者對道路交叉口的自動識別進行了大量的研究,其研究方法可分為兩類:一是傳統的道路交叉口識別方法,通過區域灰度、邊緣、方向和幾何形狀等多種特征檢測道路交叉口。文獻[2]根據交叉口的灰度特征和幾何特征,通過多角度旋轉矩形模板得到角度均值圖,識別出道路交叉口類型;文獻[3-4]在文獻[2]的方法上分別引入多尺度圓形均勻檢測和三角形檢測模型;文獻[5]提出了一種基于模板匹配和張量投票的多階段、多特征的道路交叉口提取方法;文獻[6]采用密度峰值聚類和數學形態學處理方法提取交叉口;文獻[7]利用支持向量機的方法根據交叉口路段的幾何與屬性特征完成交叉口的識別與化簡。上述的傳統識別方法多依賴于人工設計的低層次特征,未能對交叉路口的細節特征進行有效的描述,導致交叉口識別的精度不高。而且復雜的人工特征設計,增加了模型研究的成本投入。二是基于深度學習的道路交叉口識別方法,近年來基于深度學習的目標檢測算法成果越來越多[8-12]。在遙感影像道路交叉口檢測的過程中,通過采集大量道路交叉口樣本數據,訓練深度學習網絡模型,實現道路交叉口識別。文獻[13]利用CNN模型學習區分立交橋類型的深層次模糊性特征,實現了對復雜立交橋的識別和分類;文獻[14]通過訓練Faster R-CNN模型自動識別道路交叉口,但檢測速度上受到了很大的限制;文獻[15]提出了基于GoogLeNet神經網絡的復雜交叉路口識別方法,但識別類型比較單一。由于遙感影像道路交叉口目標較小,特征不明顯,而且存在較多的植被遮擋以及鄰近地物顏色相近等問題,加大了道路交叉口的檢測難度,導致目前已有的道路交叉口目標檢測算法的精度不高且檢測效率低。
目標檢測模型YOLOv3在進行目標檢測時具有檢測速度較快且精度較高的優勢,是一款非常容易操作,且對電腦配置要求相對較低的優質網絡。但其在目標檢測時存在對小目標檢測效果不佳和漏檢率較高以及難以區分重疊物體等不足。因此,本文在YOLOv3網絡的基礎上提出一種改進的道路交叉口目標檢測算法,提高了道路交叉口檢測精確度和檢測效率。
1 傳統YOLOv3算法
YOLOv3(You Only Look Once version 3)[16]是由Joseph Redmon和Ali Farhadi在2018年提出的YOLOv2升級版。通過采用K-Means聚類算法[17-18],根據目標尺寸聚類出9種不同尺寸的先驗框進行 目標檢測。YOLOv3網絡主要分為主干特征提取、加強特征提取和結果預測三個部分,其網絡結構如 圖1所示。
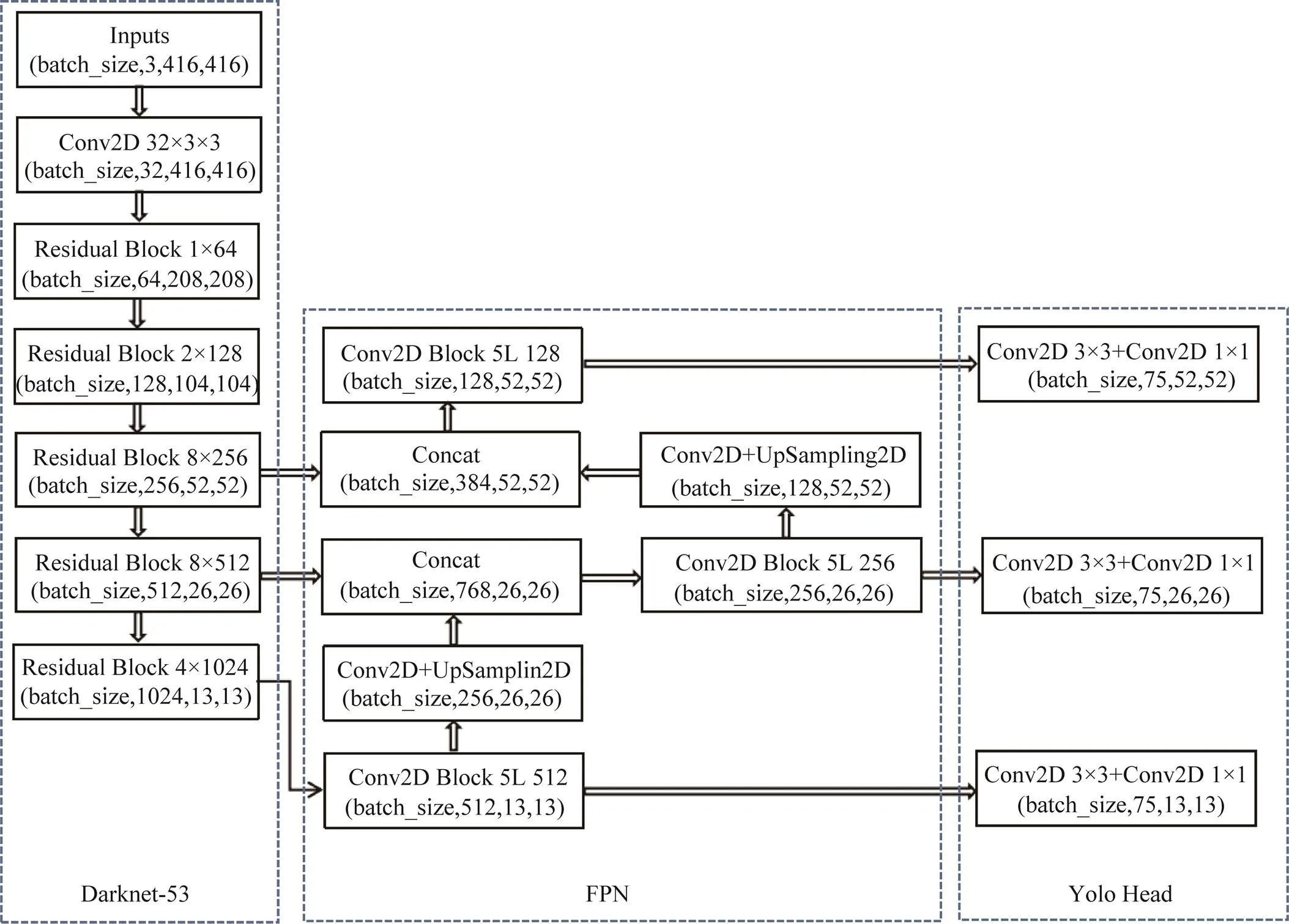
圖1 YOLOv3網絡結構
注:(batch_size, 3, 416, 416)中3表示通道數,416和416分別表示圖片的寬和高;Residual Block 1×64表示殘差塊堆疊1次,通道數是64;Conv2D Block5L表示5次卷積操作;Conv2D+UpSampling2D表示卷積和上采樣;Concat是指將兩個特征層進行堆疊;Conv2D 3×3+Conv2D 1×1表示通過一次3×3的卷積和一次1×1的卷積進行分類預測和回歸預測。
YOLOv3的主干特征提取網絡是將YOLOv2的DarkNet-19替換成性能更優的Darknet-53,通過不斷的1×1卷積和3×3卷積以及殘差邊的疊加,并在卷積層后添加批量歸一化層(Batch Normalization)抑制網絡出現過擬合現象,大幅度的加深了網絡。通過融合殘差網絡(ResNet)[19]等方法,使得YOLOv3在保持速度優勢的前提下,提升了檢測精度。YOLOv3網絡通過使用特征金字塔(Feature Pyramid Network,FPN)[20]進行加強特征提取網絡的構建,利用特征金字塔將小尺度特征圖進行上采樣,然后與大尺度特征圖進行融合,提取出三個不同尺度的特征圖,并將其傳入Yolo Head網絡中獲得預測結果。
2 CSC-YOLOv3算法
2.1 損失函數的改進
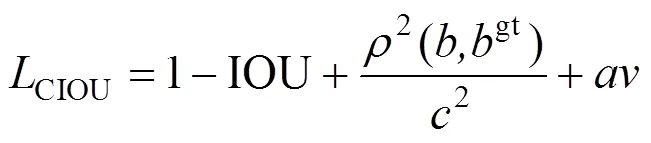
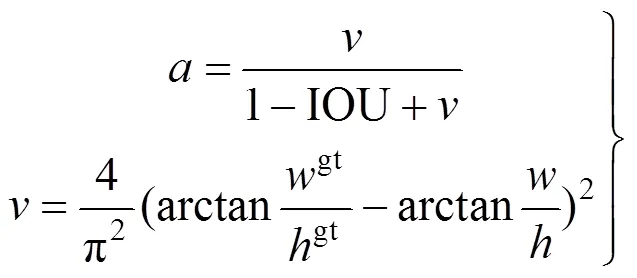
YOLOv3的損失函數由目標定位損失、目標置信度損失及目標分類損失3部分組成。定位損失包括目標預測區域中心點坐標值損失和寬高值損失,采用均方誤差(MSE)作為損失函數的目標函數。分類損失和置信度損失采用二值交叉熵損失(Binary Cross Entropy)函數[21]。總的損失函數Loss公式定義如下:


2.2 空間金字塔池化
2015年何愷明提出的空間金字塔池化(Spatial Pyramid Pooling,SPP)[24],又稱之為“SPPNet”,主要解決網絡輸入圖像尺寸不統一的問題。通過使用固定分塊的池化操作,SPP模塊可以在具有全連接層的網絡中實現多尺度圖像的輸入,能夠避免因尺度問題導致的圖像失真問題。此外,SPP中不同大小特征的融合,有利于檢測大小差異較大的目標。但由于采用空間金字塔池化會增加一定的模型復雜度,所以會影響模型運行速度。由于YOLOv3算法存在對圖像重復特征提取和對多尺度目標檢測性能較差等問題,本文在YOLOv3網絡中借鑒了SPPNet的思想,將SPP結構引入到YOLOv3的Darknet-53和FPN結構之間,在對Darknet-53的最后一個特征層進行卷積后,利用4個池化核大小分別為13′13、9′9、5′5、1′1(表示無處理)的最大池化進行處理,使網絡能夠提取具有不同感受野的多尺度深層特征,大大增加網絡的有效感受野,極大程度提升了本文多尺度道路交叉口目標檢測的識別精度。SPP結構如圖2所示。
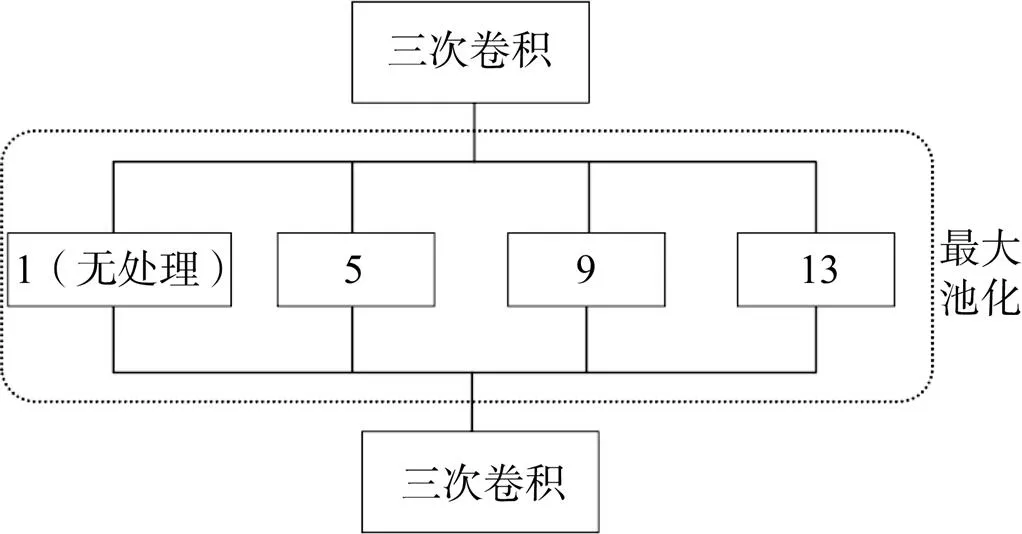
圖2 SPP結構圖
2.3 注意力機制模塊
近年來,注意力模型(Attention Model)被廣泛應用于各種深度學習任務中。在目標檢測領域中,通過在網絡中引入注意力機制,網絡能更快速定位圖像中重要特征信息的位置。注意力機制根據作用域的不同可進行二次分類,包括空間注意力機制(Spatial Attention Mechanism,SAM)、通道注意力機制(Channel Attention Mechanism,CAM)以及混合注意力機制。其中CBAM(Convolutional Block Attention Module)[25]表示卷積模塊的注意力機制模塊,是一種結合了SAM和CAM的混合注意力機制模塊,相比于SE(Squeeze and Excitation)模塊只關注CAM可以取得更好的效果。其網絡結構圖如圖3所示:
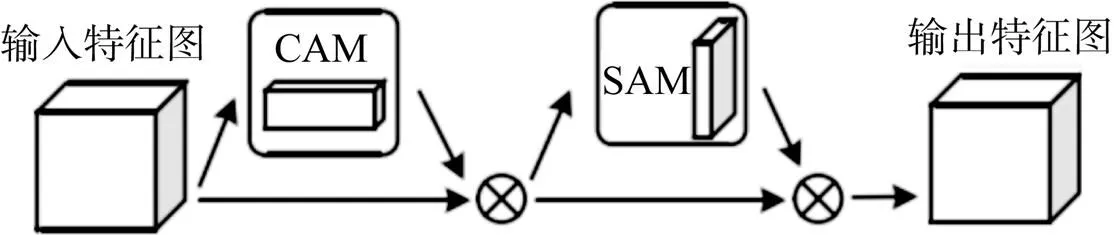
圖3 CBAM網絡結構圖
從圖3可以看出,CBAM是依次通過CAM和SAM。通過CBAM模塊能加強目標關鍵特征的注意力,抑制非關鍵特征的注意力,即使網絡更多關注到目標,抑制網絡對背景的關注,進而提升目標檢測的精度。其中CAM模塊是通過全局最大池化和全局平均池化對特征進行降維,而SAM模塊則是經過全局最大池化和全局平均池化堆疊后得到兩個不同的特征圖,再通過卷積層對其進行連接,最后利用sigmoid函數將連接的特征向量映射到[0,1],進而得到空間注意力結果。
本文通過在YOLOv3模型的三個特征層結構以及兩個上采樣結構中引入CBAM模塊,使網絡學會關注重點信息,特征信息可以覆蓋到道路交叉口的更多部位,進一步提升YOLOv3模型對特征不明顯的道路交叉口的識別精度。特別是在被植被遮擋的道路交叉口和與背景相似的城市道路交叉口中能獲得更準確的目標特征,減少背景其他物體特征對網絡的影響,進而提升道路交叉口的檢測精度。
3 實驗與結果分析
3.1 數據集制作
由于目前還沒有公開的遙感影像道路交叉口的數據集,本文使用貴陽市的“高分二號”衛星影像和馬薩諸塞州道路數據集中的部分圖像自制數據集。通過分析影像上道路交叉口的特征,使用LabelImg工具以人工方式對目標逐一進行標注,圖像標注的基本目標是根據圖像的視覺內容和獲得的指導信息來確定對應的文本語義描述[26]。因本文檢測目標為道路交叉口,所以本數據集目標標注只將遙感圖像中出現的道路交叉口目標盡可能的標注出來,其他類別不做標注。
自制的道路交叉口數據包含1 137張圖像,其中包含了十字、丁字、X形、Y形等多種常見的道路交叉口類型。將數據以8:1:1的比例劃分為訓練集、驗證集和測試集用于本文的研究。該數據集中分布的小尺寸道路交叉口目標較多,這就導致目標信息量小,難以檢測,并且場景中目標受到不同程度的遮擋,加大了檢測的難度。
3.2 網絡訓練
實驗所用的編程語言為Python,深度學習框架為Pytorch,采用Adam優化器。在整個訓練過程采用遷移學習的方式進行凍結訓練,主要是可以加快訓練速度,也可以在訓練初期防止權值被破壞。為了能使網絡更快的收斂且防止模型訓練過擬合,訓練過程中采用Label Smoothing將標簽進行平滑,初始學習率設置為0.001,每次傳入網絡的圖片數量(Batch Size)為4,并使用原始YOLOv3的初始訓練權重進行訓練。當迭代到50次時進行解凍訓練,將學習率衰減為0.0001,Batch Size改為2。隨著迭代的進行使損失逐漸收斂,從而得到模型訓練的網絡權重。經過多次實驗顯示CSC-YOLOv3網絡在迭代到90次左右趨于穩定,所以本實驗將總的訓練迭代次數設置成100。訓練過程的損失函數曲線如圖4所示。
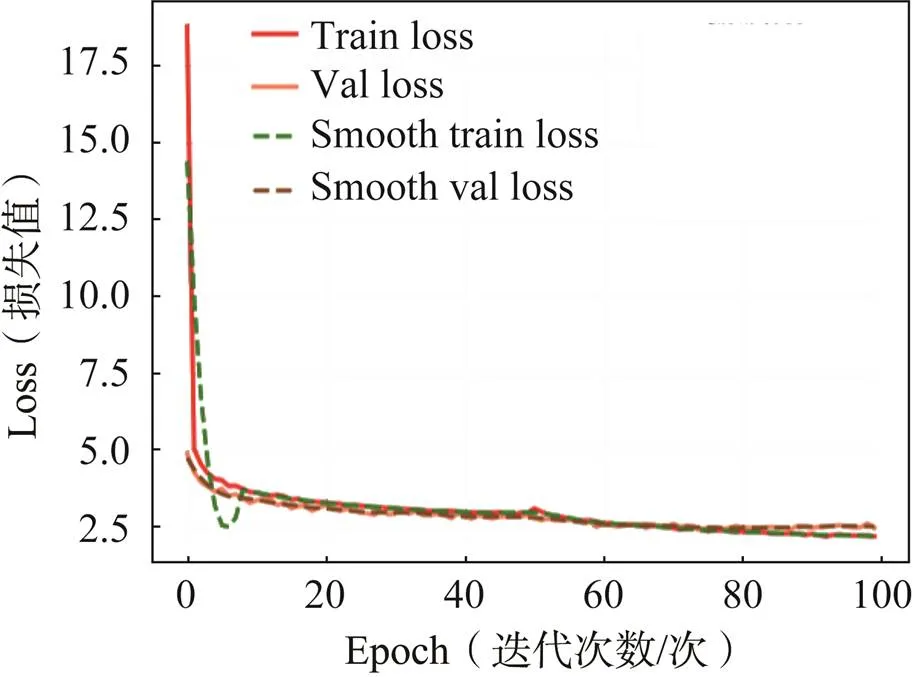
圖4 CSC-YOLOv3網絡訓練損失曲線
3.3 檢測結果及分析
(1)定性分析
為了能直觀的驗證本文提出的改進算法的性能,對原始YOLOv3算法和改進的CSC-YOLOv3算法使用相同的實驗硬件配置和實驗參數進行訓練,對檢測結果進行對比分析。分別在存在植被遮擋、鄰近地物顏色相近和小目標場景下的檢測結果如圖5~7所示。圖中黃色檢測框表示改進前后的變化情況。
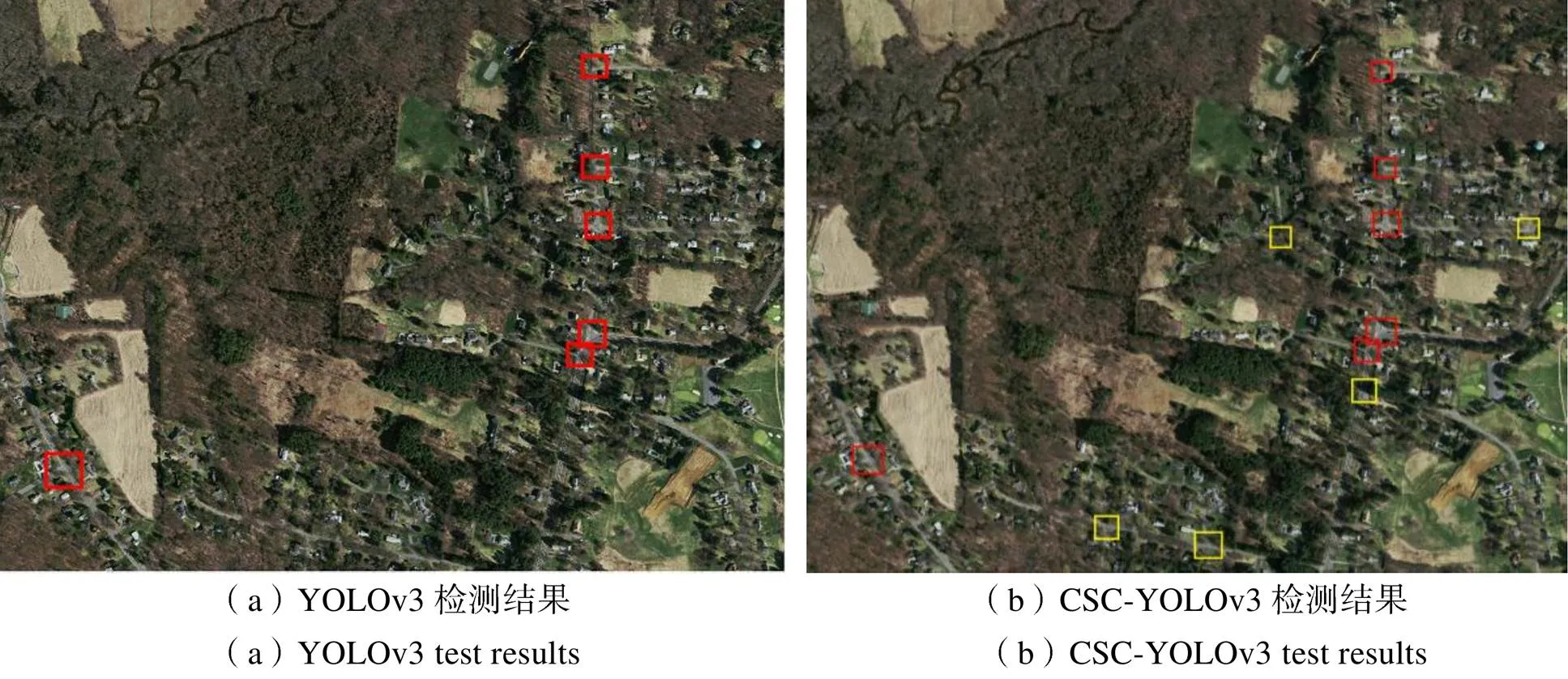
圖5 植被遮擋場景下道路交叉口檢測結果
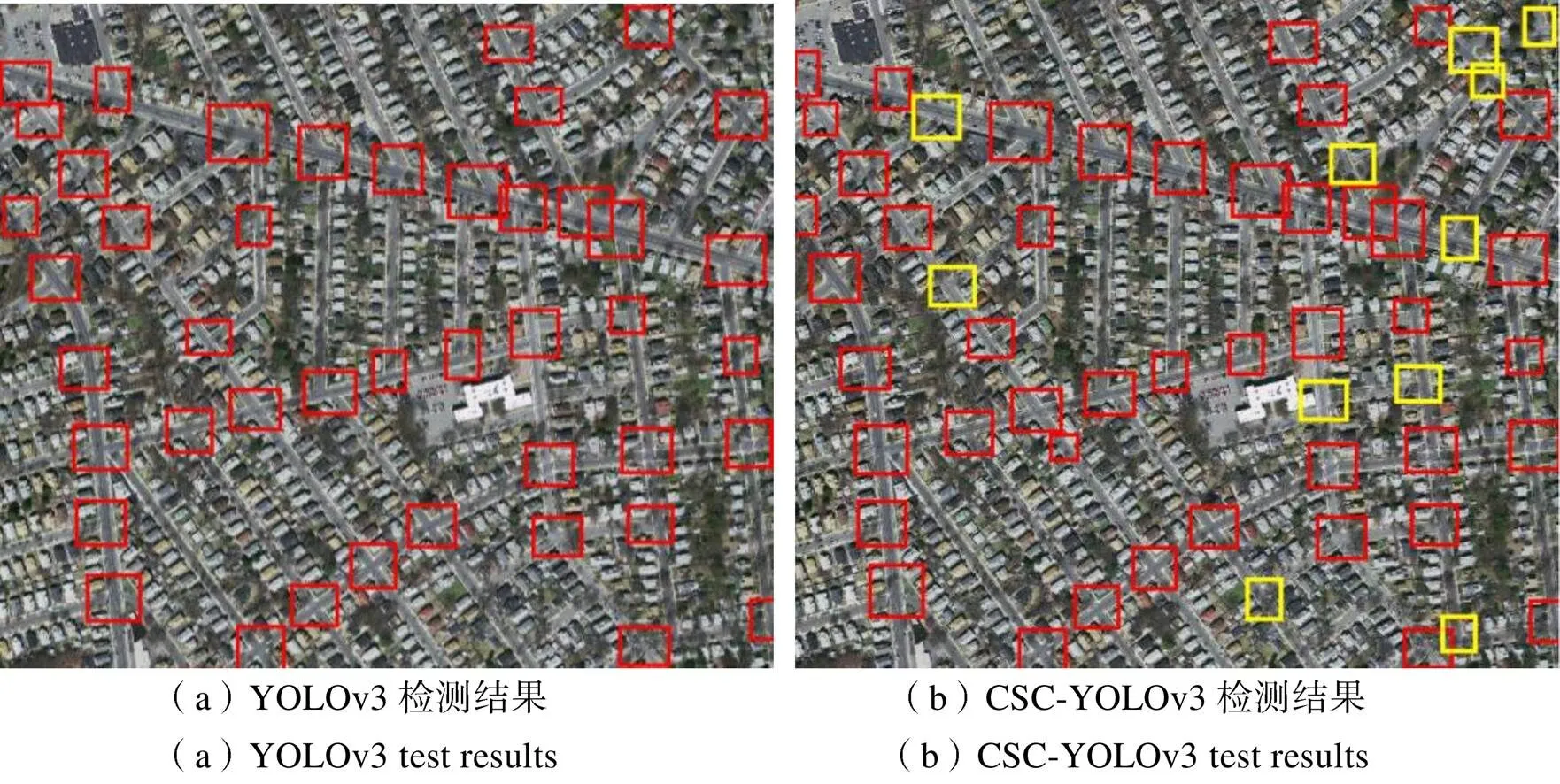
圖6 鄰近地物顏色相近場景下道路交叉口檢測結果
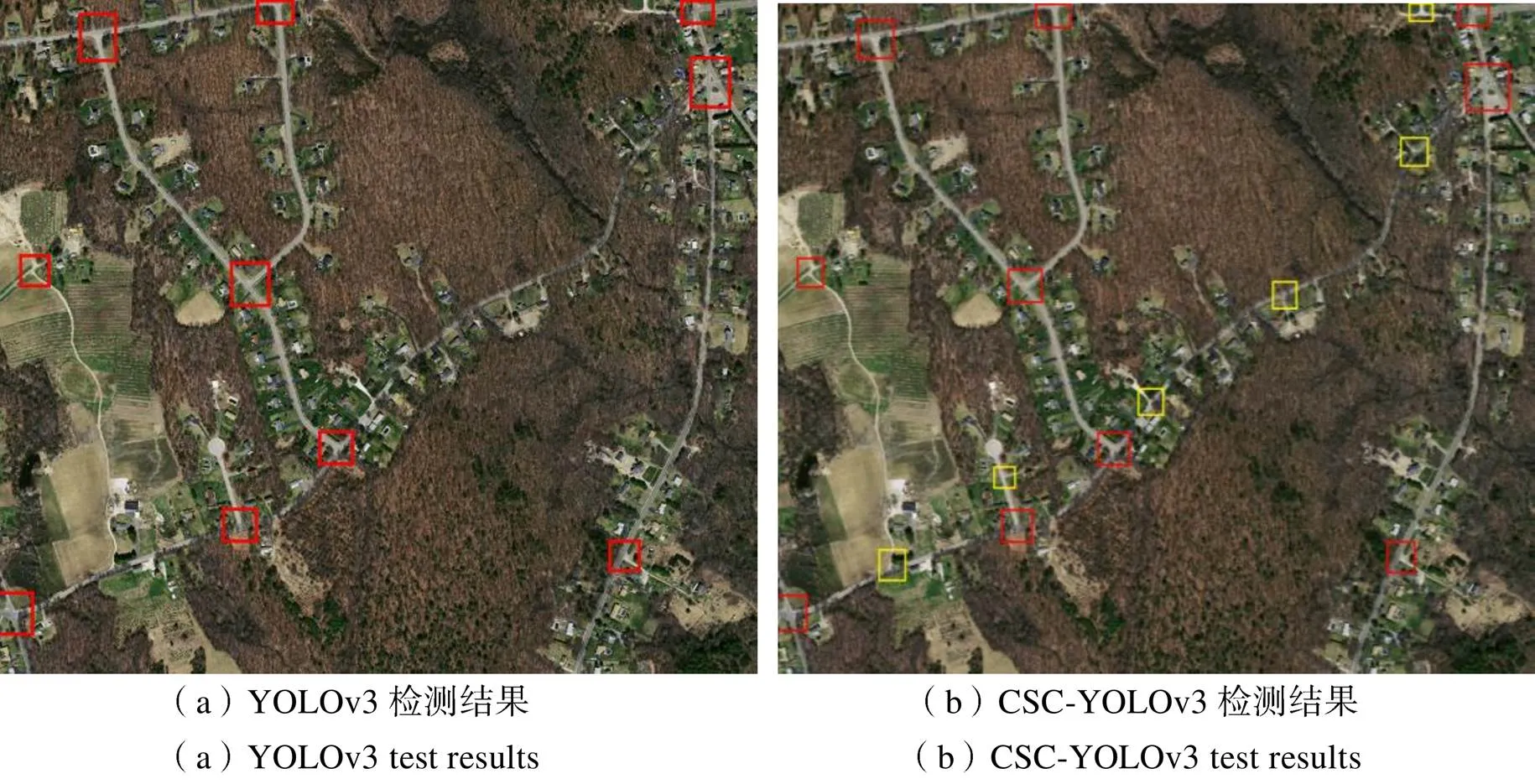
圖7 小目標場景下道路交叉口檢測結果
從圖5可以看出,由于道路交叉口被植被遮擋嚴重,在原始的YOLOv3網絡檢測中,部分道路交叉口因特征不明顯,未能被檢測出來;而CSC-YOLOv3網絡中由于引入了注意力機制,對于遮擋嚴重的道路交叉口目標,能根據道路交叉口的部分特征進行識別,這使道路交叉口的檢測更加細致。對于圖6中的城市道路,道路和周圍的房屋背景較為相似且道路網復雜交錯,導致交叉口的檢測難度加大。在這樣的情況下,原始YOLOv3網絡模型雖然能準確的檢測出大部分的道路交叉口,但出現較多的漏提目標,相比之下,CSC-YOLOv3網絡檢測出的道路交叉口更完整。而圖7中除兩條主干道以外,存在較多的小尺寸交叉路口,從圖中可以看出,兩個模型均能檢測識別出大尺寸道路交叉口目標,但針對部分小尺寸道路交叉口目標,CSC-YOLOv3網絡的檢測效果更優,在原始YOLOv3網絡的基礎上,降低了小目標漏檢率。
從以上三種不同場景下的道路交叉口檢測對比實驗可以看出,改進后的CSC-YOLOv3網絡在自制的道路交叉口數據集上表現出了較好的檢測效果。相較于原始YOLOv3網絡,其檢測性能得到了大幅提升,對于植被遮擋場景、鄰近地物顏色相近場景和小目標較多的場景,均能精確地檢測出道路交叉口目標。
(2)定量分析
為了進一步驗證本文提出的改進算法的性能,本文通過、、1、AP和FPS對改進的CSC-YOLOv3算法和原始YOLOv3算法進行評價。實驗對比結果如表1所示。
表1 道路交叉口檢測結果對比

Tab.1 Comparison of test results of road intersections
從表1可以看出,相比于原始YOLOv3算法,本文改進的CSC-YOLOv3算法對道路交叉口的檢測精度提升較為顯著,、、1、AP和1值分別提高了6.54、8.55、11.74和8個百分點,雖然FPS降低了3幀/秒,但是其檢測性能的提升彌補了速度上的不足,證明了改進CSC-YOLOv3算法的有效性,提升了高分遙感影像道路交叉口的檢測效果。
(3)消融實驗結果對比分析
本文在現有YOLOv3模型的基礎上,通過使用CIOU損失函數并引入SPP和CBAM模塊,設計了一種新的遙感圖像道路交叉口識別方法。為了明確各個模塊對網絡性能的影響,本文采用消融實驗進行對比分析。一共設置了四組實驗,如表2所示,其中“√”表示包含對應的模塊,“×”表示不包含對應的模塊。
表2 消融實驗結果比較

Tab.2 Comparison of ablation results
從表2中可以看出,相比于原始YOLOv3算法,引入不同的模塊改進的YOLOv3算法在道路交叉口數據集上的、、AP以及1值上均有所提升。S-YOLOv3網絡因為引入了SPP模塊增加了一定的模型復雜度,導致模型的計算量稍有增加,FPS下降1幀/秒,但、、AP以及1值均提升較多,分別提高了5.58、7.26、9.37和7個百分點。而CS-YOLOv3網絡通過在S-YOLOv3網絡中使用CIOU損失函數進行改進,、、AP、1以及FPS值在S-YOLOv3網絡的基礎上分別提高了0.45、0.87、0.56、1個百分點和1幀/秒,表明CIOU損失函數能在加快網絡模型的訓練速度的同時提升道路交叉口檢測精度。CSC-YOLOv3模型是綜合SPP模塊和CIOU損失函數的特點,繼續將CBAM模塊引入到YOLOv3網絡中。相比于CS-YOLOv3模型來說,CSC-YOLOv3網絡的、、和1值進一步提升,但FPS值降低了3幀/秒,表明引入CBAM模塊能使網絡學會關注交叉口的重點信息,提高目標識別精確,但由于CBAM模塊的增加使網絡運行速度受到了一定的影響。
為了更準確地描述各個模塊的性能,對原始YOLOv3、S-YOLOv3、CS-YOLOv3和CSC-YOLOv3四個模型的檢測結果進行分析,局部檢測結果如圖8~9所示。
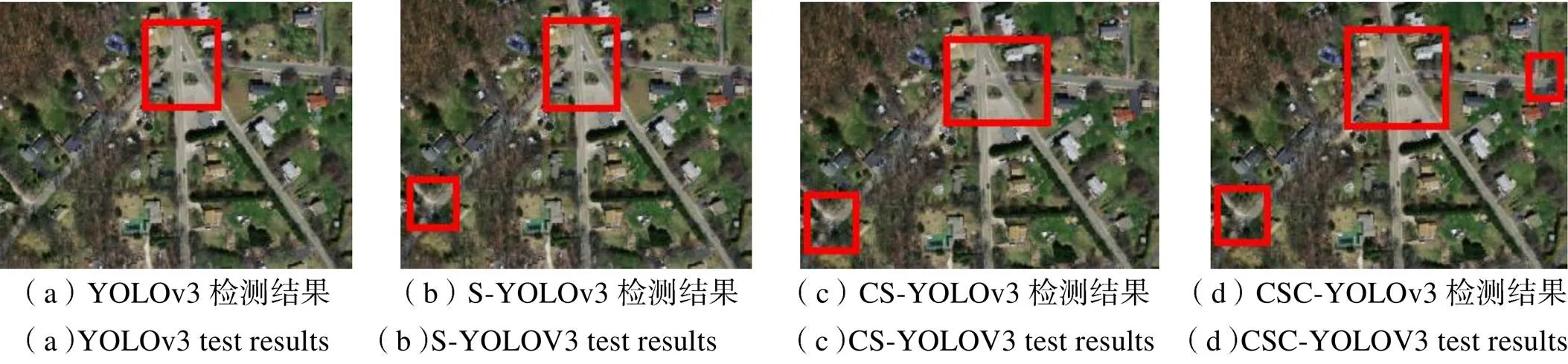
圖8 郊區道路交叉口檢測結果
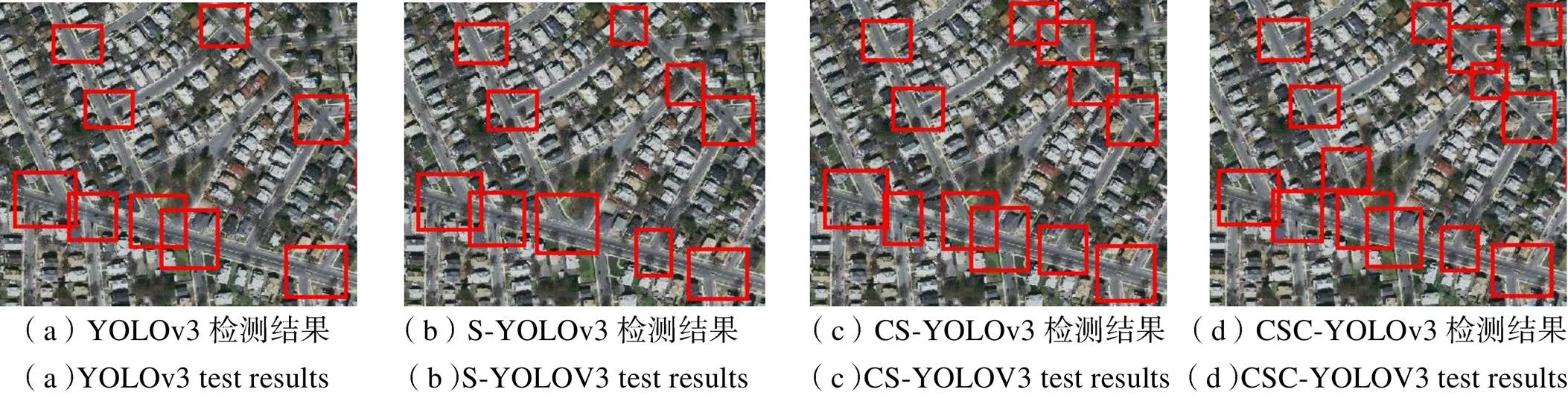
圖9 城市道路交叉口檢測結果
從以上兩種不同場景下的道路交叉口檢測對比實驗可以看出,引入不同模塊改進的YOLOv3算法的檢測效果具有一定差異。從圖8的郊區道路交叉口檢測結果可以看出:引入SPP模塊可以優化多尺度目標的檢測效果,提升小目標檢測精度。使用CIOU損失函數后對檢測結果影響不大,但目視來看,目標檢測框更加準確。而引入CBAM模塊則主要可以有效檢測被植被遮擋的道路交叉口。從圖9的城市道路交叉口檢測結果可以看出:引入SPP模塊后城市道路交叉口的檢測精度得到了一定的提升,特別是對小目標檢測效果的提升較為明顯,但部分相聚較近、被植被遮擋以及與背景相似的目標存在漏檢情況。在此基礎上,使用CIOU損失函數,更好地反應預測框的定位精度,有效地識別出了相聚較近的目標。而引入CBAM模塊則更準確地對被植被遮擋以及與背景相似的道路交叉口進行識別,有效提升了模型檢測精度。
綜上所述,SPP模塊通過增加網絡的有效感受野提升模型檢測精度,有利于檢測大小差異較大的目標;CIOU損失函數主要是提升運行速度和預測框的回歸準確度,對相聚較近的目標有較好的效果;而CBAM模塊主要用于識別特征不明顯的目標,包括植被遮擋目標和與背景相似目標等。通過消融實驗可知,本文改進的CSC-YOLOv3模型是綜合了三個模塊的特點,提升了模型的整體性能。
4 結束語
本文針對道路交叉口目標較小、存在較多的植被遮擋、鄰近地物顏色相近等問題,提出了一種改進的CSC-YOLOv3網絡模型。CSC-YOLOv3算法是將SPP模塊和CBAM模塊引入到YOLOv3模型中,并使用CIOU損失函數改進原來YOLOv3的目標定位損失函數,從而降低目標漏檢率,提升目標檢測精度。改進的CSC-YOLOv3算法對道路交叉口的檢測效果相較于原始YOLOv3網絡取得了較大的提升,對于道路交叉口遮擋嚴重的場景、背景復雜的城市場景以及小目標較多的郊區場景,均能精確地檢測出道路交叉口目標。
[1] 李雅麗, 向隆剛, 張彩麗, 等. 車輛軌跡與遙感影像多層次融合的道路交叉口識別[J]. 測繪學報, 2021, 50(11): 1546-1557.
LI Yali, XIANG Longgang, ZHANG Caili, et al. Road Intersection Recognition Based on Multi-level Fusion of Vehicle Trajectory and Remote Sensing Image[J]. Acta Geodaeticaet Cartographica Sinica, 2021, 50(11): 1546-1557. (in Chinese)
[2] 程江華, 高貴, 庫錫樹, 等. 高分辨率SAR圖像道路交叉口檢測與識別新方法[J]. 雷達學報, 2012, 1(1): 100-108.
CHENG Jianghua, GAO Gui, KU Xishu, et al. A Novel Method for Detecting and Identifying Road Junctions from High Resolution SAR Images[J]. Journal of Radars, 2012, 1(1): 100-108. (in Chinese)
[3] 蔡紅玥, 姚國清. 高分辨率遙感圖像道路交叉口自動提取[J]. 國土資源遙感, 2016, 28(1): 63-71.
CAI Hongyue, YAO Guoqing. Auto-extraction of Road Intersection from High Resolution Remote Sensing Image[J]. Remote Sensing for Land & Resources, 2016, 28(1): 63-71.(in Chinese)
[4] 郭風成, 李參海, 李宗春, 等. 高分辨率SAR影像道路交叉口自動提取方法[J]. 測繪科學技術學報, 2017, 34(2): 199-203.
GUO Fengcheng, LI Canhai, LI Zongchun, et al. A New Method for Automatic Extracting Road Junctions from High Resolution SAR Images[J]. Journal of Geomatics Science and Technology, 2017, 34(2): 199-203. (in Chinese)
[5] SUN Ke, ZHANG Junping, ZHANG Yingying, et al. Roads and Intersections Extraction from High-Resolution Remote Sensing Imagery Based on Tensor Voting under Big Data Environment[J]. Wireless Communications and Mobile Computing, 2019, 2019: 1-11.
[6] 李思宇, 向隆剛, 張彩麗, 等. 基于低頻出租車軌跡的城市路網交叉口提取研究[J]. 地球信息科學學報, 2019, 21(12): 1845-1854.
LI Siyu, XIANG Longgang, ZHANG Caili, et al. Extraction of Urban Road Network Intersections Based on Low-Frequency Taxi Trajectory Data[J]. Journal of Geo-Information Science, 2019, 21(12): 1845-1854. (in Chinese)
[7] 馬超, 孫群, 陳換新, 等. 利用路段分類識別復雜道路交叉口[J]. 武漢大學學報(信息科學版), 2016, 41(9): 1232-1237.
MA Chao, SUN Qun, CHEN Huanxin, et al. Recognition of Road Junctions Based on Road Classification Method[J]. Geomatics and Information Science of Wuhan University, 2016, 41(9): 1232-1237. (in Chinese)
[8] REDMON J, DIVVALA S, GIRSHICK R, et al. You Only Look Once: Unified, Real-time Object Detection[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), June 27-30, 2016, Las Vegas, NV, USA. IEEE, 2016: 779-788.
[9] 吳永靜, 吳錦超, 林超, 等. 基于深度學習的高分辨率遙感影像光伏用地提取[J]. 測繪通報, 2021(5): 96-101.
WU Yongjing, WU Jinchao, LIN Chao,et al. Photovoltaic Land Extraction from High-resolution Remote Sensing Images Based on Deep Learning Method[J]. Bulletin of Surveying and Mapping, 2021(5): 96-101. (in Chinese)
[10] 方明, 孫曉敏, 黃然, 等. 面向高分辨率衛星遙感的電力桿塔自動檢測[J]. 航天返回與遙感, 2021, 42(5): 118-126.
FANG Ming, SUN Xiaomin, HUANG Ran, et al. Research on Automatic Detection Algorithm of Power Tower Using High Resolution Remote Sensing Satellite Image[J]. Space Recovery & Remote Sensing, 2021,42(5):118-126. (in Chinese)
[11] 劉穎, 劉紅燕, 范九倫, 等. 基于深度學習的小目標檢測研究與應用綜述[J]. 電子學報, 2020, 48(3): 590-601.
LIU Ying, LIU Hongyan, FAN Jiulun, et al. A Survey of Research and Application of Small Object Detection Based on Deep Learning[J]. Acta Electronica Sinica, 2020, 48(3): 590-601. (in Chinese)
[12] 余培東, 王鑫, 江剛武, 等. 一種改進YOLOv4的遙感影像典型目標檢測算法[J]. 測繪科學技術學報, 2021, 38(3): 280-286.
YU Peidong, WANG Xin, JIANG Gangwu, et al. A Typical Target Detection Algorithm in Remote Sensing Images Based on Improved YOLOv4[J]. Journal of Geomatics Science and Technology, 2021, 38(3): 280-286. (in Chinese)
[13] 何海威, 錢海忠, 謝麗敏, 等. 立交橋識別的CNN卷積神經網絡法[J]. 測繪學報, 2018, 47(3): 385-395.
HE Haiwei, QIAN Haizhong, XIE Limin, et al. Interchange Recognition Method Based on CNN[J].Acta Geodaetica et Cartographica Sinica, 2018, 47(3): 385-395. (in Chinese)
[14] 周偉偉. 基于道路交叉口的高分辨率遙感影像道路提取[D]. 武漢: 武漢大學, 2018.
ZHOU Weiwei. Road Extraction from High Resolution Remote Sensing Image Based on Road Intersections[D]. Wuhan: Wuhan University, 2018. (in Chinese)
[15] 張鴻剛, 李成名, 武鵬達, 等. GoogLeNet神經網絡的復雜交叉路口識別方法[J]. 測繪科學, 2020, 45(10): 190-197.
ZHANG Honggang, LI Chengming, WU Pengda, et al. A Complex Intersection Recognition Method Based on GoogLeNet Neural Network[J]. Science of Surveying and Mapping, 2020, 45(10): 190-197. (in Chinese)
[16] REDMON J, FARHADI A. Yolov3: An Incremental Improvement[EB/OL]. [2021-12-20]. https://www.xueshufan.com/ publication/2796347433.
[17] 張素潔, 趙懷德. 最優聚類個數和初始聚類中心點選取算法研究[J]. 計算機應用研究, 2017, 34(6): 1617-1620.
ZHANG Sujie, ZHAO Huaide. Algorithm Research of Optimal Cluster Number and Initial Cluster Center[J]. Application Research of Computers, 2017, 34(6): 1617-1620. (in Chinese)
[18] 孔方方, 宋蓓蓓. 改進YOLOv3的全景交通監控目標檢測[J]. 計算機工程與應用, 2020, 56(8): 20-25.
KONG Fangfang, SONG Beibei. Improved YOLOv3 Panoramic Traffic Monitoring Target Detection[J]. Computer Engineering and Applications, 2020, 56(8): 20-25. (in Chinese)
[19] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep Residual Learning for Image Recognition[C]//Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition(CVPR), June 27-30, 2016, Las Vegas, NV, USA. IEEE, 2016: 770-778.
[20] LIN T Y, DOLLAR P, GIRSHICK R, et al. Feature Pyramid Networks for Object Detection[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, July 21-26, 2017, Honolulu, HI, USA. IEEE, 2017: 2117-2125.
[21] 張彬彬, 帕孜來·馬合木提. 基于YOLOv3改進的火焰目標檢測算法[J/OL]. (2021-03-12)[2022-02-22]. http://kns. cnki.net/kcms/detail/31.1690.TN.20210311.1628.047.html.
ZHANG Binbin, PAZILAI Mahemuti. Improved Flame Target Detection Algorithm Based on YOLOv3[J/OL]. (2021-03-12)[2022-02-22]. http://kns.cnki.net/kcms/detail/31.1690.TN.20210311.1628.047.html. (in Chinese)
[22] ZHENG Zhaohui, WANG Ping, LIU Wei, et al. Distance-IoU Loss: Faster and Better Learning for Bounding Box Regression[EB/OL]. [2022-02-22]. https://arxiv.org/pdf/1911.08287.pdf.
[23] 秦鵬, 唐川明, 劉云峰, 等. 基于改進YOLOv3的紅外的目標檢測方法[J]. 計算機工程, 2022, 48(3): 211-219.
QIN Peng, TANG Chuanming, LIU Yunfeng, et al. Infrared Target Detection Method Based on Improved YOLOv3[J]. Computer Engineering, 2022, 48(3): 211-219. (in Chinese)
[24] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916.
[25] WOO S, PARK J, LEE J Y, et al. CBAM: Convoluational Block Attention Module[EB/OL]. [2022-02-22]. https://arxiv. org/pdf/1807.06521.pdf.
[26] 盧漢清, 劉靜. 基于圖學習的自動圖像標注[J]. 計算機學報, 2008, 31(9): 1629-1639.
LU Hanqing, LIU Jing. Image Annotation Based on Graph Learning[J]. Chinese Journal of Computers, 2008, 31(9): 1629-1639. (in Chinese)
Improved YOLOv3 Algorithm for Remote Sensing Image Road Automatic Intersection Identification
SHAO Xiaomei1ZHANG Chunkang1WEI Yongyu1ZHANG Xianyun1ZHOU Chengyu2ZHANG Zhonghao1
(1 School of Mining, Guizhou University, Guiyang 550025, China)(2 Troops 31626, Guangzhou 510800, China)
Aiming at the problems of small intersection target, more vegetation occlusion and similar color of adjacent ground objects, an improved YOLOv3 high-resolution image intersection target detection algorithm, CSC-YOLOv3, was proposed. Firstly, CIOU loss function is used to improve the target locating loss of YOLOv3 and reduce the target missing rate. Secondly, the effective receptive field of YOLOv3 network was increased by adding spatial pyramid pooling module after the main feature extraction network of YOLOv3. Finally, the attention mechanism module was introduced into three feature layer structures and two upsampling structures of YOLOv3 network to improve the detection accuracy of the network. The results show that the accuracy rate, recall rate, average accuracy rate and F1 score of CSC-YOLOv3 algorithm reached 86.05%, 70.19%, 83.71% and 77% respectively. Compared with the original YOLOv3 algorithm, the improvement is 6.54, 8.55, 11.74 and 8 percentage points respectively. Although the FPS is reduced by 3 frames per second, the improvement of its detection performance makes up for the lack of speed and effectively improves the detection effect of high-resolution remote sensing images on road intersections.
YOLOv3; road intersections; target detection; space pyramid pooling; attentional mechanism; remote sensing application
P237
A
1009-8518(2022)05-0123-10
10.3969/j.issn.1009-8518.2022.05.012
2022-04-20
國家自然科學基金(41701464);貴州大學培育項目(貴大培育[2019]26號);貴州省省級科技計劃項目(黔科合支撐[2022]一般204)
邵小美, 張春亢, 韋永昱, 等. 改進YOLOv3算法的遙感圖像道路交叉口自動識別[J]. 航天返回與遙感, 2022, 43(5): 123-132.
SHAO Xiaomei, ZHANG Chunkang, WEI Yongyu, et al. Improved YOLOv3 Algorithm for Remote Sensing Image Road Automatic Intersection Identification[J]. Spacecraft Recovery & Remote Sensing, 2022, 43(5): 123-132. (in Chinese)
邵小美,女,1994生,2017年獲貴州大學測繪工程學士學位,現在貴州大學測繪科學與技術專業攻讀碩士學位。主要研究方向為高分遙感影像信息提取。E-mail:1598091011@qq.com。
(編輯:毛建杰)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
光學精密工程(2016年6期)2016-11-07 09:07:19