航天員艙外活動(dòng)虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)研究
2022-11-09 04:21:00陳學(xué)文孔祥杰晁建剛
載人航天 2022年5期
陳學(xué)文, 張 炎, 黃 鵬, 趙 陽, 孔祥杰, 晁建剛
(中國航天員科研訓(xùn)練中心人因工程重點(diǎn)實(shí)驗(yàn)室, 北京 100094)
1 引言
航天員在執(zhí)行航天任務(wù)前需要進(jìn)行大量的訓(xùn)練,針對不同的訓(xùn)練內(nèi)容,采用合適的訓(xùn)練設(shè)備非常重要。 出艙任務(wù)艙外作業(yè)訓(xùn)練目前多在模擬失重水槽中進(jìn)行,是國際上普遍采用的主要訓(xùn)練手段[1-4]。 其可近似模擬人在太空的失重運(yùn)動(dòng)特性,使航天員在模擬失重環(huán)境、著艙外服工況下,認(rèn)知艙體、航天員、機(jī)械臂的相對關(guān)系,并完成實(shí)物操作訓(xùn)練。 訓(xùn)練時(shí),地面保障人員把空間站部分艙體、機(jī)械臂放入水槽中,航天員穿著水下艙外訓(xùn)練服,依據(jù)作業(yè)需求調(diào)整服裝使其接近在軌作業(yè)姿勢的懸浮狀態(tài)(重力與浮力相等)。 受水槽尺寸限制、重力等影響,為了便于操作,需要保障人員轉(zhuǎn)動(dòng)艙體,作業(yè)點(diǎn)始終在艙體的兩側(cè)或正上方。 當(dāng)需要從一個(gè)作業(yè)點(diǎn)轉(zhuǎn)移到另一個(gè)作業(yè)點(diǎn)時(shí),機(jī)械臂上的航天員和艙壁上航天員,轉(zhuǎn)移路徑與在軌任務(wù)差異較大。 整個(gè)訓(xùn)練過程一般需要按照作業(yè)剖面對航天員的操作進(jìn)行分解,分場景片段式進(jìn)行,很難連續(xù)不間斷地進(jìn)行一次完整的艙外作業(yè)任務(wù),且訓(xùn)練過程需要大量人力物力保障,耗時(shí)時(shí)間也非常長。
除了模擬失重水槽外,虛擬現(xiàn)實(shí)(Virtual Reality,VR)技術(shù)在應(yīng)用到航天領(lǐng)域時(shí),具有獨(dú)特的優(yōu)勢,能夠突破物理環(huán)境限制,可以在地面條件下逼真模擬失重環(huán)境下三維太空作業(yè)場景,快速構(gòu)建各種應(yīng)急場景,有效彌補(bǔ)實(shí)物、半實(shí)物等地面訓(xùn)練設(shè)備的不足,可作為實(shí)物訓(xùn)練方式的補(bǔ)充,同時(shí),也可應(yīng)用于科學(xué)研究及工程驗(yàn)證。
20 世紀(jì)80 年代以來,NASA 首先開展了虛擬現(xiàn)實(shí)技術(shù)及在載人航天任務(wù)中的應(yīng)用研究,研發(fā)了6 代虛擬現(xiàn)實(shí)頭盔及虛擬現(xiàn)實(shí)仿真系統(tǒng),用于外太空環(huán)境適應(yīng)與空間站環(huán)境熟悉訓(xùn)練、哈勃望遠(yuǎn)鏡維修訓(xùn)練、艙外自我營救的SAFER(Simplified Aid for EVA Rescue)訓(xùn)練以及其他艙外活動(dòng)任務(wù)訓(xùn)練[5-7];20 世紀(jì)90 年代俄羅斯、歐空局、日本、加拿大等相繼開發(fā)了虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng),包括空間站艙內(nèi)環(huán)境熟悉和空間定向訓(xùn)練[8]、國際空間站艙內(nèi)外設(shè)備布局訓(xùn)練[9]、機(jī)械臂操作訓(xùn)練[10]等。 陳學(xué)文等[11-12]也進(jìn)行了虛擬現(xiàn)實(shí)相關(guān)技術(shù)研究,建立了面向SZ-7 任務(wù)航天員出艙活動(dòng)的虛擬現(xiàn)實(shí)仿真系統(tǒng)和面向空間實(shí)驗(yàn)室階段天宮實(shí)驗(yàn)艙的艙內(nèi)外環(huán)境熟悉系統(tǒng)。
面向空間站航天員艙外作業(yè)訓(xùn)練需求,本文利用虛擬現(xiàn)實(shí)技術(shù),創(chuàng)建逼真的空間站艙外作業(yè)任務(wù)場景和空間站、機(jī)械臂及地球星空等運(yùn)動(dòng)仿真,實(shí)現(xiàn)艙外作業(yè)虛擬現(xiàn)實(shí)交互操作仿真,形成一個(gè)與真實(shí)艙外作業(yè)任務(wù)視覺感知一致、操作感知近似、聽覺感知一致、運(yùn)動(dòng)感知近似、人在回路的多人虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)。
2 系統(tǒng)仿真架構(gòu)
航天員艙外作業(yè)是高風(fēng)險(xiǎn)任務(wù),通常一個(gè)乘組包含3 名航天員,其中2 名航天員在艙外由機(jī)械臂輔助和自主爬行至作業(yè)點(diǎn),1 名航天員在艙內(nèi)負(fù)責(zé)監(jiān)視和操控機(jī)械臂,3 名航天員協(xié)同完成艙外作業(yè)任務(wù)。 利用虛擬現(xiàn)實(shí)技術(shù)實(shí)現(xiàn)3 名航天員出艙活動(dòng)仿真及協(xié)同訓(xùn)練。
虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)組成如圖1 所示,包括生成各視角圖像的虛擬現(xiàn)實(shí)仿真、工程數(shù)據(jù)仿真、訓(xùn)練進(jìn)程控制、訓(xùn)練信息數(shù)據(jù)庫、提供虛擬場景觀察及交互的虛擬現(xiàn)實(shí)頭盔和手柄、實(shí)現(xiàn)訓(xùn)練信息顯示及通話的視頻通話系統(tǒng)、實(shí)現(xiàn)機(jī)械臂操控與監(jiān)視的機(jī)械臂操作臺(tái)等。

圖1 虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)組成原理Fig.1 Composition of virtual reality training system
艙外航天員佩戴虛擬現(xiàn)實(shí)頭盔(已集成耳麥)和手持手柄,實(shí)現(xiàn)虛擬場景的觀察和交互操作。 艙外活動(dòng)虛擬場景由虛擬現(xiàn)實(shí)仿真軟件生成,包括空間站及艙外作業(yè)設(shè)備、機(jī)械臂、地球、星空和虛擬航天員等,虛擬場景中空間站的飛行數(shù)據(jù)、飛行軌道、飛行姿態(tài)、帆板轉(zhuǎn)動(dòng)角度、機(jī)械臂運(yùn)動(dòng)等數(shù)據(jù)由工程數(shù)據(jù)仿真提供。 為逼真模擬航天員艙外作業(yè)過程中聽覺,由虛擬現(xiàn)實(shí)仿真軟件實(shí)現(xiàn)艙外服風(fēng)機(jī)噪聲、報(bào)警聲等模擬,并實(shí)現(xiàn)訓(xùn)練時(shí)教員與航天員之間通話傳輸,或任務(wù)演練時(shí)地面指揮、機(jī)械臂操作者和出艙航天員之間通話傳輸。由視頻、通話系統(tǒng)實(shí)現(xiàn)音視頻的傳輸。
虛擬現(xiàn)實(shí)仿真軟件根據(jù)虛擬現(xiàn)實(shí)頭盔和手柄的跟蹤數(shù)據(jù),為每名虛擬現(xiàn)實(shí)頭盔佩戴者實(shí)時(shí)生成各自第一視點(diǎn)圖像,包括航天員1VR 視角、航天員2VR 視角和輔教VR 視角;為方便在顯示器上任意視角觀察三維場景,由虛擬現(xiàn)實(shí)仿真軟件生成一個(gè)輔教第三視角圖像,通過鼠標(biāo)鍵盤控制視點(diǎn)位置和觀察方向。
艙內(nèi)航天員使用機(jī)械臂操作臺(tái)對機(jī)械臂監(jiān)視和操作,該設(shè)備與虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)通過網(wǎng)絡(luò)實(shí)現(xiàn)遠(yuǎn)距離數(shù)據(jù)、語音和視頻互聯(lián)。 整個(gè)訓(xùn)練過程統(tǒng)一由訓(xùn)練控制軟件實(shí)現(xiàn)過程控制,包括訓(xùn)練開始、訓(xùn)練結(jié)束等,并把相關(guān)訓(xùn)練數(shù)據(jù)存儲(chǔ)到訓(xùn)練系統(tǒng)數(shù)據(jù)庫中。
3 關(guān)鍵技術(shù)
3.1 基于空間站任務(wù)的三維場景建模與渲染
空間站艙外作業(yè)虛擬場景對象包括空間站、機(jī)械臂、艙外作業(yè)工具和設(shè)備、著艙外服航天員、地球、太陽及星空等,空間站及太陽的方向、相對地球和太陽的位置關(guān)系以及機(jī)械臂按照任務(wù)實(shí)際進(jìn)行動(dòng)態(tài)運(yùn)動(dòng)。 為了實(shí)現(xiàn)逼真在軌視覺畫面效果,且滿足實(shí)時(shí)性要求,使用基于物理的渲染方法(Physically Based Rendering, PBR)創(chuàng)建和渲染場景對象,即把渲染流程和基于材質(zhì)物理屬性的離線渲染貼圖結(jié)合起來,有效解決了交互實(shí)時(shí)性與畫面渲染耗時(shí)的矛盾。
根據(jù)素材建立尺寸、結(jié)構(gòu)準(zhǔn)確的三維幾何模型,為了減少面片數(shù)量,降低虛擬場景渲染負(fù)擔(dān),提高渲染速度,采取以下措施:
1)只建立表面視覺可見的幾何結(jié)構(gòu),對于獨(dú)立運(yùn)動(dòng)部件單獨(dú)建立幾何結(jié)構(gòu);
2)建立低精度和高精度兩套模型,高精度模型用于烘焙高精細(xì)的貼圖。 在虛擬現(xiàn)實(shí)仿真中使用低精度模型,并貼上高精細(xì)貼圖,實(shí)現(xiàn)視覺上高精度。 例如,對于無需操作的螺釘、孔洞等結(jié)構(gòu),可以使用高精度貼圖體現(xiàn)。
對低精度模型進(jìn)行UV 紋理坐標(biāo)展開、編輯優(yōu)化處理,對高精度模型按照各部分材質(zhì)的物理屬性離線烘焙出表面紋理,逼真體現(xiàn)物體表面結(jié)構(gòu)細(xì)節(jié)、高光、金屬度和遮罩陰影等,用顏色圖、環(huán)境遮擋貼圖(AO 圖)、法線圖和金屬度4 張貼圖表示。 在渲染引擎中使用低精度模型,設(shè)置高精度模型生成的紋理和材質(zhì),并設(shè)置空間環(huán)境中太陽光和環(huán)境光,實(shí)時(shí)生成逼真的虛擬場景圖像,仿真效果如圖2 所示,畫面逼真,渲染幀速率超過60 FPS,可滿足交互實(shí)時(shí)性要求。

圖2 三維場景仿真Fig.2 Simulated 3D scene
3.2 出艙復(fù)雜設(shè)備的交互操作仿真
出艙任務(wù)不同,需要操作的對象也不同,但是每次出艙都需要操作的設(shè)備或工具包括腳限位器、艙外操作臺(tái)、各種把手、航天服安全繩及便攜式安全帶等,仿真時(shí)需要按照實(shí)際功能實(shí)現(xiàn)每個(gè)設(shè)備的所有操作,才能逼真模擬出艙過程。 在這些設(shè)備中,安全繩和安全帶不同于其他由剛體組成的設(shè)備,由可變形的繩體和特殊結(jié)構(gòu)的掛鉤組成,操作包括抓掛鉤、往扶欄上掛掛鉤、從扶欄上取掛鉤、抓拽繩體等。 柔性繩體的表達(dá)與實(shí)時(shí)變形仿真方法采用質(zhì)點(diǎn)-直線-彎曲彈簧模型和基于位置的實(shí)時(shí)變形計(jì)算方法[11]。
3.2.1 柔性繩體交互操作仿真
柔性繩體的形狀根據(jù)交互操作情況不斷變化,同時(shí)對其所連接的物體位置和姿態(tài)產(chǎn)生影響。例如,掛鉤上的物體能夠隨著安全繩的拖拽而運(yùn)動(dòng)、虛擬航天員人體也能夠沿著繩體移向扶手等。
柔性繩體交互操作原理如圖3 所示。 ①抓取繩索:根據(jù)虛擬手與安全繩/安全帶繩體節(jié)點(diǎn)之間的最小距離,判斷是否抓取繩體,如果滿足抓取繩體條件,對安全繩/安全帶生成固定節(jié)點(diǎn),并與手綁定在一起; ②拖拽繩體:根據(jù)繩體節(jié)點(diǎn)之間的距離變化,判斷繩體是彎曲狀態(tài),還是拉長狀態(tài),實(shí)現(xiàn)繩體的拖拽功能。 繩體創(chuàng)建后記錄初始距離,在抓住繩子后,計(jì)算實(shí)時(shí)距離。 如果該距離大于初始距離,則認(rèn)為繩體已經(jīng)拉直(如圖3 安全繩拉長狀態(tài)),繼續(xù)拉扯,需要移動(dòng)人物;如果該距離小于初始距離(如圖3 安全繩彎曲狀態(tài)),則認(rèn)為繩索并未拉直,處于彎曲狀態(tài),繼續(xù)拉扯,并移動(dòng)繩索節(jié)點(diǎn)位置。

圖3 安全繩距離判斷原理Fig.3 Principle of safety rope distance judgment
掛鉤自由態(tài)、掛鉤束縛態(tài)、繩體纏繞在扶欄上的仿真效果如圖4~6 所示。
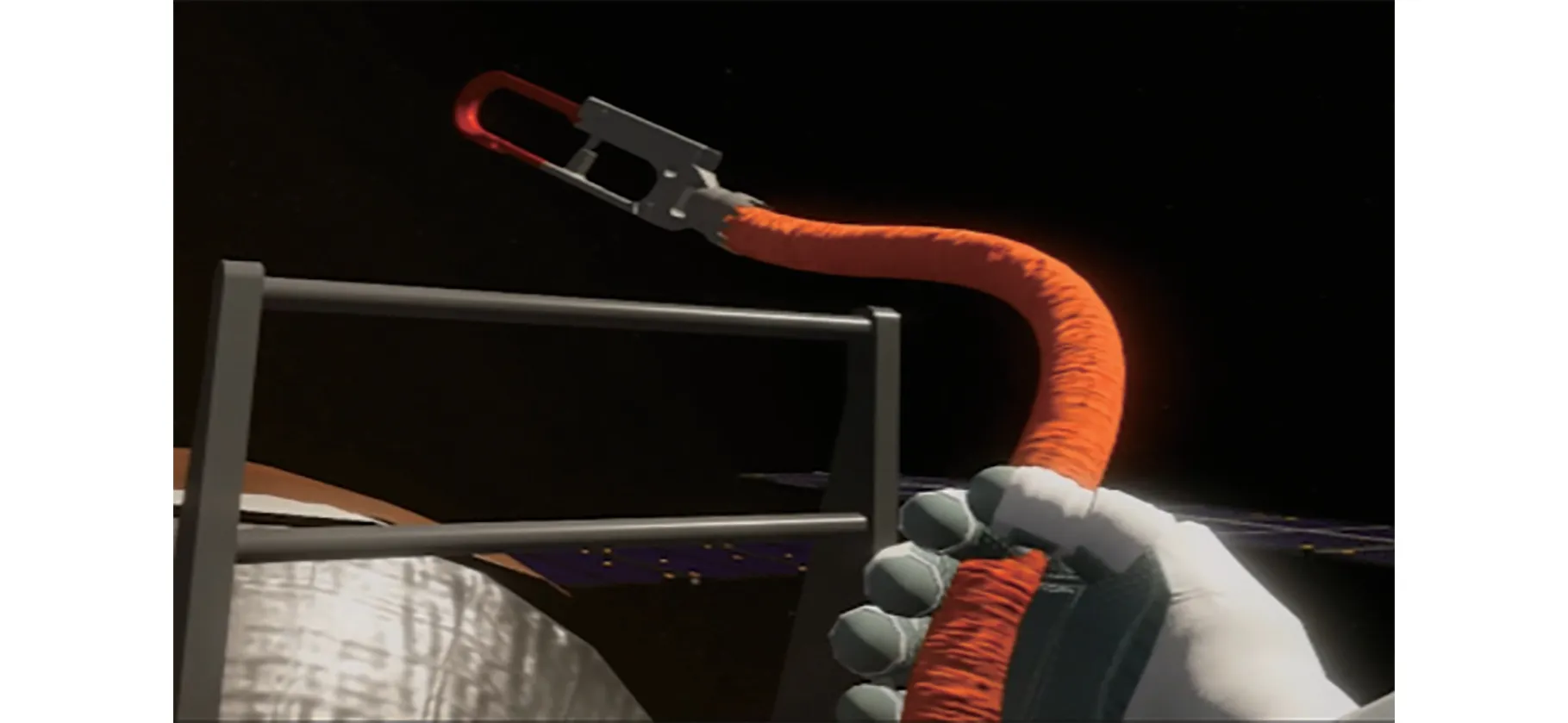
圖4 掛鉤自由態(tài)下抓取繩體變形效果Fig.4 Deformation of grabbing rope for free hook

圖5 掛鉤束縛態(tài)下抓取繩體變形效果Fig.5 Deformation of grabbing rope for restraint hook
3.2.2 安全掛鉤交互操作仿真

圖6 繩體在扶欄上運(yùn)動(dòng)受阻后纏繞變形效果Fig. 6 Twisted and deformed rope after being blocked on the handrail
1)掛鉤碰撞檢測算法和掛鉤在扶欄上約束狀態(tài)判斷算法:對掛鉤前端離散化結(jié)構(gòu)如圖7 所示,邊界用規(guī)則的方盒子代替,方盒子與扶欄等進(jìn)行實(shí)時(shí)碰撞檢測。 判斷掛鉤是否在扶欄內(nèi),把4個(gè)盒子同時(shí)設(shè)為限制觸發(fā)器,中間圓柱代表扶欄即障礙物,中空區(qū)域?yàn)闋顟B(tài)觸發(fā)器。 每個(gè)限制觸發(fā)器設(shè)計(jì)一個(gè)朝外的z軸方向,當(dāng)立柱觸碰到某一條邊時(shí),無法再朝外運(yùn)動(dòng)。 在運(yùn)動(dòng)過程中計(jì)算運(yùn)動(dòng)趨勢矢量與z軸方向夾角,判斷掛鉤哪條邊與扶欄接觸,為碰撞檢測后續(xù)運(yùn)動(dòng)限制提供信息。如果立柱在狀態(tài)觸發(fā)器內(nèi),則表示掛鉤被束縛。在交互操作過程中,只要掛鉤前端開口打開,掛到扶欄上后,就使用該規(guī)則判斷掛鉤與扶欄的約束關(guān)系。

圖7 觸發(fā)器設(shè)置示意Fig.7 Diagram of trigger setting
2)掛鉤被扶欄約束后交互操作過程運(yùn)動(dòng)處理:算法流程設(shè)計(jì)如圖8 所示,包括物體約束狀態(tài)的確定、抓取物體判斷、運(yùn)動(dòng)趨勢計(jì)算、趨勢有效性判斷、虛擬手位置和姿態(tài)設(shè)定等。

圖8 掛鉤操作處理流程Fig.8 Flowchart of hook operation processing
解決了虛擬與現(xiàn)實(shí)交互操作過程中時(shí)而一致、時(shí)而不一致的問題,既保證了虛擬場景中視覺上一致性,又保證了交互操作自然性,實(shí)現(xiàn)了視覺和交互操作的統(tǒng)一。
圖9 為掛鉤交互操作結(jié)果示意圖,圖9(a)為虛擬手抓住束縛態(tài)下的掛鉤時(shí)虛擬手和手柄重合時(shí)情形,圖9(b)為虛擬手抓住束縛態(tài)下的掛鉤往外移動(dòng)手柄時(shí)虛擬手柄和虛擬手脫離、虛擬手保持抓住掛鉤時(shí)情形。
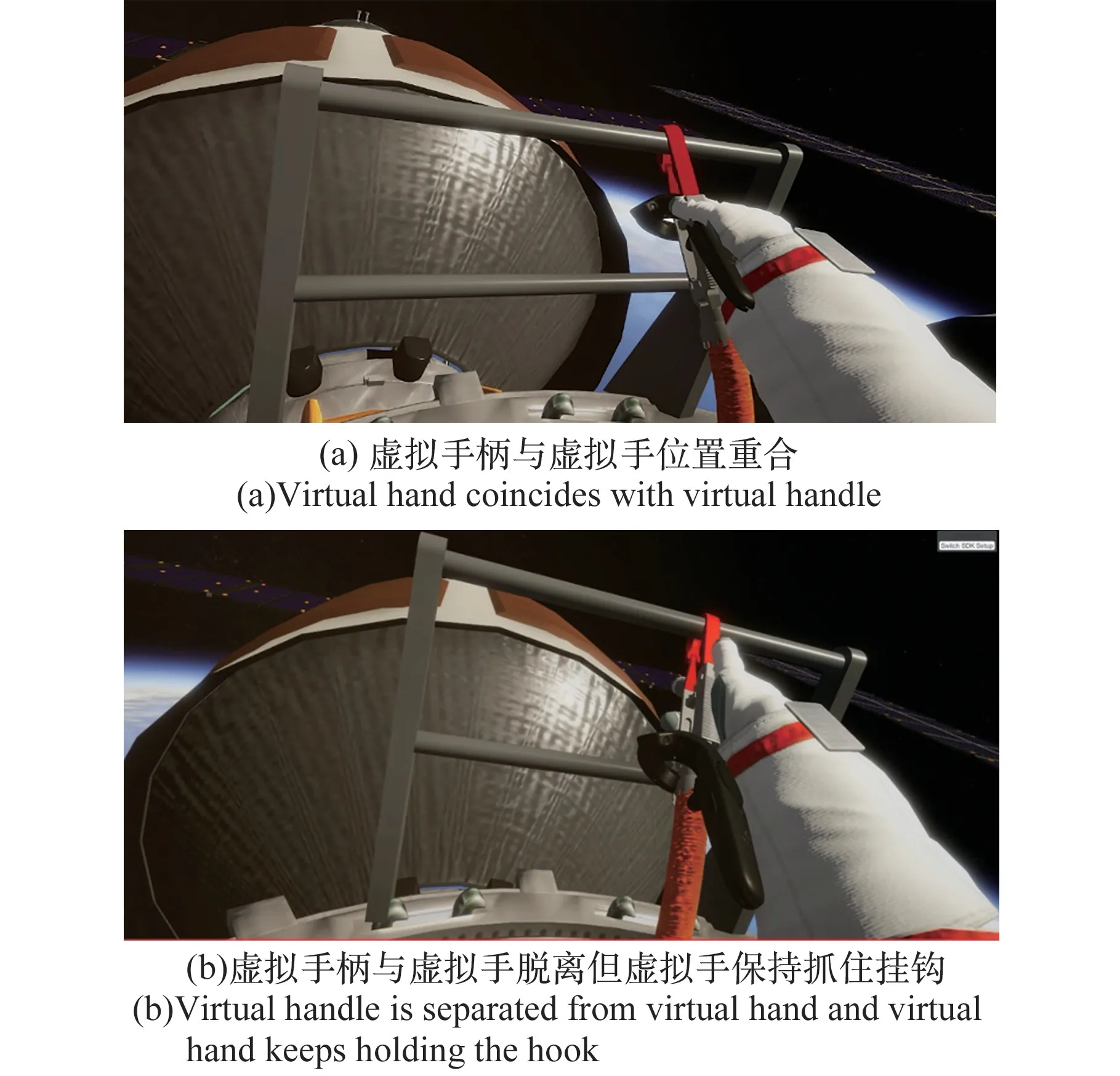
圖9 掛鉤交互操作效果Fig.9 Effect of hook interactive operation
3.3 多人協(xié)同操作仿真
2 名出艙航天員、輔教等在同一個(gè)虛擬場景中工作,出艙航天員需要完成艙外設(shè)備的各種操作,操作后物體的位置、姿態(tài)、狀態(tài)、教鞭指向等信息需要在同一個(gè)虛擬場景的各個(gè)客戶端(VR1 客戶端、VR2 客戶端、輔教VR 客戶端、輔教第三視角客戶端)進(jìn)行同步,保證每個(gè)設(shè)備被任何客戶端操作改變后,能夠及時(shí)、無差錯(cuò)地更新到其他客戶端。 各客戶端之間的同步方法是建立虛擬現(xiàn)實(shí)仿真C/S 服務(wù)器模式,即各客戶端的操作結(jié)果數(shù)據(jù)實(shí)時(shí)輸出到服務(wù)器,由服務(wù)器把結(jié)果數(shù)據(jù)再輸出到其他客戶端,同時(shí)把結(jié)果數(shù)據(jù)輸出到機(jī)械臂操作臺(tái)圖像仿真軟件中,最終實(shí)現(xiàn)虛擬現(xiàn)實(shí)仿真各客戶端及其他圖像軟件狀態(tài)同步。
為了實(shí)現(xiàn)設(shè)備有序操作,設(shè)計(jì)控制權(quán)并對其統(tǒng)一管理,先操作的航天員擁有該設(shè)備的控制權(quán),直至放下該設(shè)備并被另外的航天員操作后,才失去該設(shè)備控制權(quán),同時(shí)另外的航天員擁有該設(shè)備的控制權(quán),一個(gè)設(shè)備不能被2 名航天員同時(shí)擁有控制權(quán)。
4 應(yīng)用及評價(jià)
該系統(tǒng)已實(shí)現(xiàn)了SZ-12、SZ-13 任務(wù)全部艙外活動(dòng)仿真,并應(yīng)用于航天員訓(xùn)練、艙外協(xié)同指揮程序聯(lián)合演練等。 根據(jù)SZ-12 任務(wù)實(shí)際出艙視頻和航天員的調(diào)查問卷結(jié)果,比對分析感知一致性和虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)的應(yīng)用價(jià)值。
4.1 艙外作業(yè)感知一致性比對分析
選擇SZ-12 任務(wù)出艙活動(dòng)2 個(gè)典型操作:安裝擴(kuò)展泵組和航天員相互拍照,比對在軌操作與虛擬現(xiàn)實(shí)仿真效果,部分截圖如圖10、圖11所示。

圖10 安裝擴(kuò)展泵組(左:在軌圖像,右:仿真圖像)Fig.10 Installation of the extension pump set(Left:Image from orbit camera,Right:Image from simulation)

圖11 安裝擴(kuò)展泵組后2 名航天員相互拍照(左:在軌圖像,右:仿真圖像)Fig.11 Taking pictures of each other(Left:Image from orbit camera,Right:Image from simulation)
1)視覺感知:虛擬現(xiàn)實(shí)仿真中航天員所觀察的對象、數(shù)量、各對象大小形狀、場景中各對象之間位置關(guān)系按照工程實(shí)際構(gòu)建,與在軌一致,實(shí)現(xiàn)了虛擬現(xiàn)實(shí)仿真視覺感知的一致性。
2)操作感知:虛擬現(xiàn)實(shí)仿真實(shí)現(xiàn)了被操作設(shè)備所有操作步驟,操作動(dòng)作簡單,只需食指扣動(dòng)扳機(jī)的簡單動(dòng)作控制虛擬手完成設(shè)備操作,而虛擬手在虛擬環(huán)境中操作動(dòng)作由計(jì)算機(jī)動(dòng)態(tài)生成,生成的虛擬動(dòng)作與實(shí)際一致。 在沉浸式的虛擬環(huán)境下,最終實(shí)現(xiàn)了視覺主導(dǎo)下的一致性和操作綜合感知的近似性。
3)聽覺感知:虛擬現(xiàn)實(shí)仿真實(shí)現(xiàn)了服裝的噪聲、報(bào)警聲的逼真仿真,同時(shí)具備教員與航天員之間通話功能,在任務(wù)演練時(shí)承擔(dān)了地面指揮、機(jī)械臂操作者和出艙航天員之間的通話,整體實(shí)現(xiàn)了地面訓(xùn)練時(shí)聽覺感知的一致性。
4)運(yùn)動(dòng)感知:在虛擬現(xiàn)實(shí)訓(xùn)練中,一名航天員在虛擬場景中搭乘機(jī)械臂運(yùn)動(dòng)到作業(yè)點(diǎn),一名航天員自主攀爬到作業(yè)點(diǎn),地球、太陽與空間站運(yùn)動(dòng)關(guān)系按照實(shí)際工程逼真仿真,機(jī)械臂的運(yùn)動(dòng)軌跡、運(yùn)動(dòng)速度和控制方式與實(shí)際任務(wù)一致,實(shí)現(xiàn)了空間飛行器運(yùn)動(dòng)一致、機(jī)械臂運(yùn)動(dòng)一致,航天員艙外攀爬運(yùn)動(dòng)一致。 通過虛擬現(xiàn)實(shí)逼真的三維場景渲染和頭盔立體三維成像,航天員實(shí)現(xiàn)了視覺主導(dǎo)下運(yùn)動(dòng)一致性,運(yùn)動(dòng)綜合感知的近似性。
4.2 航天員調(diào)查問卷分析
虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)研制完成后,由13 名航天員在執(zhí)行任務(wù)前使用并開展問卷調(diào)查,部分問卷結(jié)果見圖12~16。
圖12 是艙外作業(yè)流程步驟仿真覆蓋性的問卷調(diào)查,包括4 個(gè)選項(xiàng),8 人選擇了“步驟完全覆蓋,非常滿足訓(xùn)練需求”,5 人選擇了“步驟覆蓋較好,滿足訓(xùn)練需求”。

圖12 流程步驟仿真覆蓋性問卷結(jié)果Fig.12 Results of questionnaire for step simulation coverage
圖13 是熟悉艙外作業(yè)環(huán)境作用的問卷調(diào)查,11 人選擇“幫助較大”,1 人選擇“幫助非常大”,1人選擇“有幫助”。

圖13 熟悉艙外作業(yè)環(huán)境問卷結(jié)果Fig.13 Results of questionnaire for familiarization of extravehicular operation scene with VR
圖14 是艙外作業(yè)訓(xùn)練優(yōu)勢的問卷調(diào)查,包括5 個(gè)選項(xiàng),8 人選擇“空間站、機(jī)械臂、航天員等可以按照真實(shí)的工程狀態(tài)在三維空間移動(dòng)”,10 人選擇“作業(yè)視覺場景逼真”,10 人選擇“安全繩、便攜式安全帶能夠按照真實(shí)任務(wù)流程參與其中”,9 人選擇“參與訓(xùn)練的出艙設(shè)備多,且出艙設(shè)備視覺和操作真實(shí)”,10 人選擇“能夠?qū)崿F(xiàn)訓(xùn)練的步驟多”。

圖14 艙外作業(yè)訓(xùn)練優(yōu)勢問卷結(jié)果Fig. 14 Results of questionnaire for advantages of extravehicular operation training with VR
圖15 是機(jī)械臂協(xié)同訓(xùn)練優(yōu)勢的問卷調(diào)查,包括2 個(gè)方面的多項(xiàng)選擇問題,11 人選擇“01、02、03 崗位角色認(rèn)同度高”,10 人選擇“語音、圖像、操作要素全、逼真”。

圖15 機(jī)械臂協(xié)同訓(xùn)練優(yōu)勢問卷結(jié)果Fig.15 Results of questionnaire for advantages of space robotic arm collaborative training with VR
圖16 是虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)重要性評價(jià)的問卷調(diào)查,12 人選擇“重要”,1 人選擇“非常重要”。
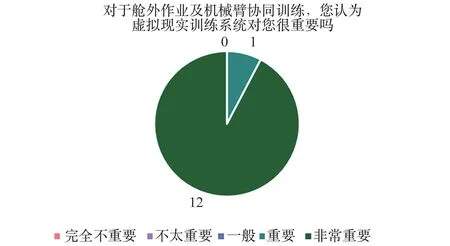
圖16 虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)重要性問卷結(jié)果Fig.16 Results of VR importance questionnaire
從評價(jià)結(jié)果看,虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)在艙外作業(yè)、機(jī)械臂協(xié)同、艙外熟悉等方面得到了航天員的認(rèn)可和較高的評價(jià),并成功應(yīng)用于SZ-12 和SZ-13任務(wù)航天員訓(xùn)練、艙外協(xié)同指揮程序聯(lián)合演練等。虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)訓(xùn)練場景如圖17 所示。

圖17 SZ-12 任務(wù)航天員虛擬現(xiàn)實(shí)訓(xùn)練Fig.17 VR training of SZ-12 astronaut
5 結(jié)論
1)基于虛擬現(xiàn)實(shí)技術(shù),以人的感知為焦點(diǎn),面向航天員訓(xùn)練提出了一種多人協(xié)同虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)組成結(jié)構(gòu),突破了逼真的三維場景渲染、安全繩/安全帶交互操作仿真、多人協(xié)同操作仿真等技術(shù),實(shí)現(xiàn)了視覺感知一致、操作感知近似、聽覺感知一致、運(yùn)動(dòng)感知近似、人在回路的多人協(xié)同虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)。
2)基于空間站及艙外作業(yè)工程狀態(tài)和操作流程,創(chuàng)建了逼真的艙外作業(yè)三維場景,開發(fā)了SZ-12、SZ-13 任務(wù)艙外作業(yè)工具/設(shè)備的逼真交互操作仿真系統(tǒng),實(shí)現(xiàn)了虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)首次在航天員艙外作業(yè)訓(xùn)練的成功應(yīng)用,并得到航天員肯定評價(jià)。
3)航天員訓(xùn)練應(yīng)用實(shí)踐表明:在艙外作業(yè)全流程沉浸式操作訓(xùn)練中無異樣感覺,系統(tǒng)的逼真性和可用性得到驗(yàn)證。
4)虛擬現(xiàn)實(shí)訓(xùn)練系統(tǒng)在應(yīng)用于艙外作業(yè)方面是目前模擬任務(wù)要素全面、訓(xùn)練代價(jià)小、多人參與的地面模擬設(shè)備,不僅在航天員訓(xùn)練上發(fā)揮作用,在機(jī)械臂聯(lián)合演練、艙外協(xié)同指揮程序演練和艙外操作工效綜合評價(jià)等工程驗(yàn)證方面發(fā)揮了作用。
高逼真實(shí)時(shí)云渲染、非手柄自然交互操作仿真以及柔性繩體實(shí)時(shí)力學(xué)仿真等技術(shù)將是未來研究的主要方向。
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
電子制作(2018年11期)2018-08-04 03:26:08
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
故事大王(2016年7期)2016-09-22 17:30:08
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
兒童故事畫報(bào)·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
消費(fèi)者報(bào)道(2014年7期)2014-07-31 11:23:57
