載人登月近距離交會制導策略分析
2022-11-09 04:21:10王曉磊解永春王高陽
載人航天 2022年5期
劉 濤, 王曉磊, 解永春, 王高陽, 李 驥, 楊 巍
(1.北京控制工程研究所, 北京 100190; 2.空間智能控制技術國家級重點試驗室, 北京 100190)
1 引言
Apollo 計劃將人類送上月球,開創了載人深空探測的序幕[1]。 2004 年,美國又提出星座計劃(Constellation Program),宣布將再次登上月球,并建立月球基地[2]。 雖然該計劃于2010 年被終止,但標志著載人登月以及建立月球基地等成為月球探測的未來發展方向。 目前,美國正在實施月神計劃(Artemis Program),準備在建設近直線Halo軌道(Near-Rectilinear Halo Orbit)空間站的基礎上,于2024 年讓人類重新踏上月球[3]。
中國則通過嫦娥系列探測器歷時13 年圓滿完成無人月球“繞、落、回”探測任務。 在月球建造基地并以此作為中轉站,將為實施載人深空探測提供極大的便利。 而實施月球軌道交會對接可大幅減小從地球或月面發射航天器的規模,有效降低對起飛運載能力的要求。 因此,月球軌道交會對接技術是實施載人登月以及載人深空探測的支撐性技術之一。
交會對接任務可分為2 個階段:①遠距離交會將追蹤器從入軌初始軌道導引到相距數十公里近距離交會段要求的預定軌道,設計重點是實現快速性;②近距離交會則指從相距數十公里直至對接的過程,設計重點是控制精度和安全性[4]。 近距離交會制導是整個交會對接策略設計的核心。 受制于復雜的空間環境和有限的地面測控支持能力,相較于近地軌道任務,載人登月在任務類型、快速性、自主性和安全性等方面,都有全新要求。 而與無人月球探測任務不同,載人登月涉及多種交會對接任務類型,尤其需要適應近圓和橢圓等不同軌道;此外,確保航天員安全是載人任務的第一要務,必須設計應急交會方案以提高安全性。
本文針對載人登月交會的上述特點,通過對月球軌道環境下不同交會制導律的性能進行比較,對近距離交會制導策略進行分析研究,提出兼具通用性和高性能要求的交會制導策略,為工程實踐提供參考。
2 交會制導律
在近距離交會策略設計中,通過設定若干停泊點,由追蹤器在停泊點間進行轉移,逐步接近目標器。 為便于軌控求解,交會制導僅將停泊點位置作為制導目標,抵達停泊點后再進行目標速度控制。
目前,可用于近距離交會段的交會制導律主要包括:基于絕對軌道參數的LAMBERT 制導、基于相對軌道參數的C-W 制導、視線制導以及T-H制導等,其中LAMBERT 制導和T-H 制導可用于橢圓軌道目標交會。 LAMBERT 制導基于航天器絕對軌道動力學模型進行設計,求解較為復雜,但具有通用性強的優勢,可兼顧遠程交會和近程交會軌控,并可應用于橢圓軌道和近圓軌道交會。美國Apollo 工程和航天飛機任務均采用LAMBERT 制導進行交會軌道控制;T-H 制導是一種基于橢圓軌道近距離線性化相對動力學模型的制導律,其計算量較C-W 制導大,且求解過程中需要利用到目標航天器的軌道真近點角。 目前,還沒有T-H 制導應用于工程實踐的報道;C-W 制導是一種基于圓軌道近距離線性化相對動力學模型的制導律,由于其求解簡單,且僅需利用目標器軌道角速度,因而在各國的交會對接飛行任務中得到廣泛使用[3];視線制導是一種基于球坐標系相對動力學模型的制導律。 由于球坐標間的耦合較為嚴重,所以視線制導多應用于停泊點接近末端的交會軌控,其優勢在于可依據接近距離逐步施加減速控制,進而提高交會過程的穩健性。 視線制導已在俄羅斯和中國的交會對接飛行任務中得到使用[4]。
2.1 LAMBERT 制導
航天器交會問題可以歸結為LAMBERT 問題,即給定航天器的初始位置r1和終端位置r2以及轉移飛行時間Δt, 確定飛行軌道。 對于LAMBERT 問題的求解,一般的思路是選擇獨立的迭代變量,根據飛行時間定理建立控制方程組,迭代計算以獲得一定精度的解。 對LAMBERT 問題的研究方興未艾,對應的算法有多種。 本文采用Battin 普適迭代算法設計LAMBERT 制導。
Battin 普適迭代算法以x作為獨立的迭代變量,對應的方程組如式(1)所示[5]:

采用New-Raphson 方法進行數值求解得到x,迭代函數如式(2)、(3)所示:



LAMBERT 制導基于二體軌道動力學進行設計,軌道攝動會對制導精度產生不利影響。 為此,Thompson 等[6]提出以二體軌道LAMBERT 制導解作為初值,采用精確軌道動力學外推進行制導結果預測,據此進行制導目標修正,形成預測迭代LAMBERT 制導算法。 該算法在提高制導精度的同時,會帶來計算量的大幅增加,這對實際星載應用造成了困難。

2.2 T-H 制導
T-H 制導是一種基于橢圓軌道近距離線性化相對動力學模型的制導律。
所采用軌道坐標系OoXYZ的定義為:原點Oo為航天器的質心,OoX軸為位置方向且背離月心,OoZ軸指向軌道角速度方向,OoY軸與OoZ、OoX軸構成右手系。
依據二體軌道得到相對動力學模型,并對引力加速度差采用Taylor 分解,且僅保留一階項,得到如式(6)所示的相對動力學模型:
以目標器軌道真近點角為自變量,可以求解得到相對狀態,滿足式(7):

即

其中,et為目標器軌道偏心率,d,κi,γ的具體形式見文獻[5]。
采用狀態轉移方程得到任意時刻的相對狀態與初始狀態間的關系,見式(8):



2.3 C-W 制導
在目標器軌道系(VVLH 系)中,C-W 方程的具體形式見式(11)[4]:

其中,ωt為目標航天器軌道角速度,aci(i=x,y,z) 為追蹤器控制加速度。
以相對位置和相對速度為狀態量,可以求解得到轉移方程式(12):

3 尋的段交會制導分析
尋的段為近距離交會過程的初始階段,追蹤器通常從距離目標器后下方數十千米處開始抵達目標器附近的停泊點。 本文以Apollo11/12 所采用的尋的段交會策略為例[1],對采用不同制導律的交會軌道控制性能進行比較分析。
Apollo11/12 在所執行的月面起飛交會對接任務中采用了共面橢圓交會方案(Coelliptic Rendezvous)。 經遠程導引階段后,軌道為共面、同心的橢圓軌道,并且具有如下特性[7]:①目標器和追蹤器半長軸at,ac和偏心率et,ec滿足atet=acec;②軌道高度差滿足at-ac=ΔH,ΔH為設計值;③軌道拱線方向重合。 具體設計中,尋的段初始軌道高度差設定為28 km;在首脈沖設計中,Apollo 采用了推力視線指向策略,即首脈位置對應的視線角為26.6°,轉移時間對應目標器掠過的相位角為130°,這使得首脈沖指向恰好沿著視線方向,從而避免調姿[8]。 尋的段飛行過程中施加了2 次中間修正脈沖,脈沖間隔約為15 min。
分析中,軌道動力學計算中采用LP165P 引力攝動模型,考慮70 階非球形引力攝動以及地球和太陽三體引力攝動。 初始軌道參數如表1 所示(目標器初始偏心率et在0.001~0.03 間遍歷)。
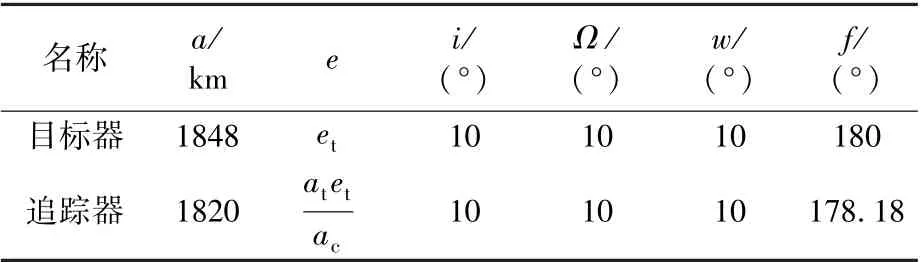
表1 尋的段初始軌道Table 1 Initial orbit elements of the homing phase
LAMBERT 制導中需要對目標器軌道進行外推計算,設定星載算法考慮20 階非球形引力攝動以及地球和太陽引力攝動。
仿真結果見表2~表5 以及圖1~圖3,可以得出:①偏心率小于0.005 時,C-W 制導精度和燃料消耗性能優于T-H 制導;反之,則T-H 更優;此外,T-H 制導在偏心率小于0.001 時性能欠佳,應避免使用。 ②不同偏心率時,LAMBERT 制導誤差變化很小,燃料消耗最優,但其制導精度并無優勢。③LAMBERT 制導基于二體絕對軌道模型設計,未考慮攝動影響,這是其制導誤差的主要來源。 若動力學采用二體軌道時,則LAMBERT 制導的精度非常高(表5);而T-H 和C-W 制導基于相對動力學模型設計,近距離時兩航天器軌道攝動接近,差分后軌道攝動項殘留很小,制導模型精度更高,這是其精度相對LAMBERT 制導高的原因。

圖1 尋的段交會飛行軌跡(e=0.01)Fig.1 The flight trajectory in homing phase (e=0.01)

圖3 尋的段不同偏心率時的制導總速度增量Fig.3 Total velocity increment of the homing phase under different eccentricities

表2 尋的段e=0.001 時的制導結果Table 2 Guidance result of the homing phase (e=0.001)

表5 尋的段e=0.01 時的制導結果(二體軌道)Table 5 Guidance result of the homing phase with two body orbit (e=0.01)
LAMBERT 制導的優勢在于可適用于不同偏心率工況,性能穩定且燃料消耗最優;劣勢為由于未考慮軌道攝動,制導精度相對較低;而C-W 制導更適用于小偏心率工況,大偏心率時其性能下降較快;T-H 制導則在偏心率大于0.005 時性能優于C-W 制導,但是其在小偏心率時性能欠佳。
綜合分析,尋的交會的目標位置通常較目標器還有一定距離,可以容忍一定制導誤差。 LAMBERT 制導的通用性好,精度也滿足工程設計要求,綜合性能相對更優。
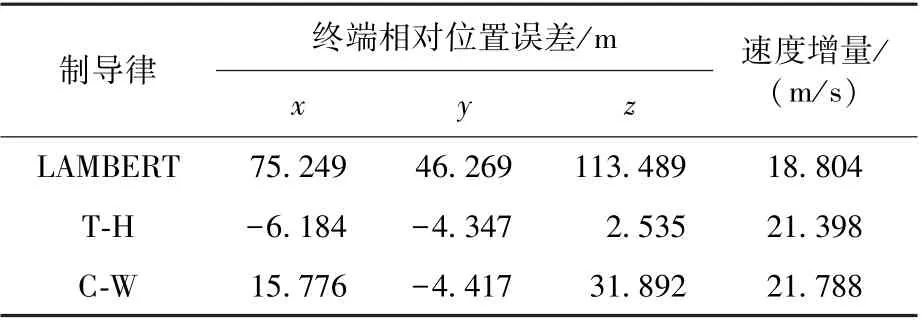
表3 尋的段e=0.01 時的制導結果Table 3 Guidance result of the homing phase (e=0.01)
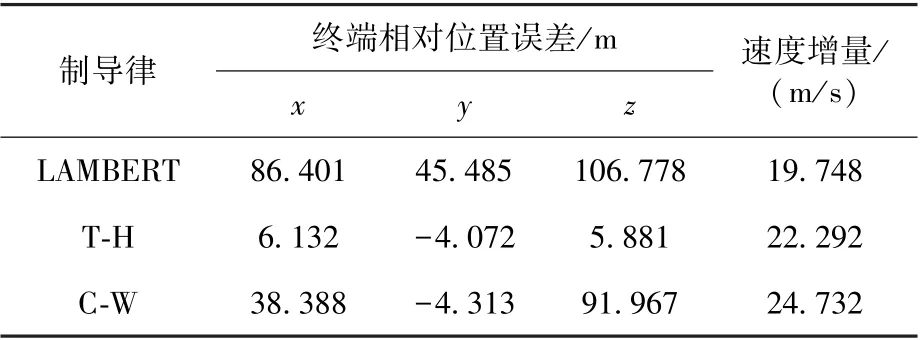
表4 尋的段e=0.03 時的制導結果Table 4 Guidance result of the homing phase (e=0.03)

圖2 尋的段不同偏心率時的制導終端位置偏差Fig.2 Guidance position deviation in homing phase under different eccentricity
4 接近段交會制導分析
接近段為近距離交會過程的第二階段,追蹤器通常從距離目標器數千米處經過停泊點間的轉移(可以包括繞飛)直至捕獲數百米處的對接走廊止。 以下以目標器-V-BAR 處5 km 停泊點轉移至0 m 過程為例,對采用不同制導律的交會性能進行比較分析。 初始軌道參數如表6 所示(et在0.001~0.03 間遍歷)。

表6 接近段初始軌道設定Table 6 Initial orbit elements of the approaching phase
仿真結果見表7~表9 以及圖4 ~圖6。 可以得出:①偏心率小于0.01 時,C-W 制導性能優于T-H 制導;反之,則T-H 更優;②不同偏心率時,LAMBERT 制導誤差變化很小,但其制導精度和燃料消耗均無優勢。
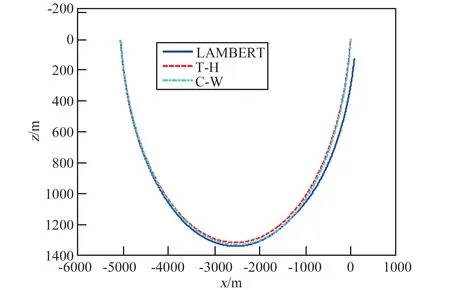
圖4 接近段飛行軌跡(e=0.01)Fig.4 The flight trajectory in approaching phase (e =0.01)

圖6 接近段不同偏心率時的制導總速度增量Fig.6 Total velocity increment of the approaching phase under different eccentricities

表7 接近段e=0.001 時的制導結果Table 7 Guidance result of the approaching phase(e=0.001)

表9 接近段e=0.03 時的制導結果Table 9 Guidance result of the approaching phase (e =0.03)

表8 接近段e=0.01 時的制導結果Table 8 Guidance result of the approaching phase (e=0.01)
LAMBERT 制導的優勢在于可適用于不同偏心率工況,性能穩定,但是制導精度明顯較低;而C-W 制導更適用于小偏心率工況,大偏心率時其性能有一定下降;T-H 則在偏心率大于0.01 時性能優于C-W 制導,但是其在小偏心率時性能欠佳。

圖5 接近段不同偏心率時的位置偏差Fig.5 The guidance position deviation in approaching phase under different eccentricities
綜合分析,LAMBERT 制導精度較差并不適合接近段使用;T-H 制導則在小偏心率時性能下降過大,通用性欠佳;而C-W 制導則具備通用性,雖然精度有一定下降,但是仍滿足工程應用要求,綜合性能相對更優。
5 近距離交會制導策略設計
載人登月交會制導方案設計需要兼顧正常交會和應急交會,必須適應近圓和橢圓等不同軌道類型,滿足快速性、自主性和安全性要求。 同時,由于星載計算資源有限,這就要求交會制導方案兼具通用性并確保制導精度。
可以看到,LAMBERT 制導因未考慮軌道攝動,其制導精度并不具優勢。 但是LAMBERT 制導可適應不同軌道類型,具備良好的通用性。 因此,在對制導誤差容忍度相對較高的尋的段,可將LAMBERT 制導作為主份方案。
在接近段,由于相對距離較近,對制導精度的性能要求更為嚴格,制導精度更高的T-H 制導和C-W 制導更為適用。 雖然T-H 制導在橢圓軌道時性能優異,但是在近圓軌道時其性能下降顯著,兼容性較差。 而C-W 雖然在橢圓軌道時性能會下降,但是通過增加修正頻次,對應的增加一定燃料消耗,可確保精度滿足任務要求;其次,考慮到深空任務自主定軌難度大,相較于T-H 制導中需要利用目標器軌道真近點角,C-W 制導僅需利用目標軌道角速度,這對定軌精度要求要低得多;再次,C-W 制導求解更加簡單,也更利于星載制導算法設計。 可見,C-W 制導的兼容性和制導精度綜合性能在接近段更具優勢。
綜上分析,采用分段使用LAMBERT 制導和C-W 制導的綜合制導策略,是載人登月任務近距離交會的可行方案。
表10 給出了不同目標器軌道偏心率時,近距離綜合制導策略的終端位置誤差和軌控速度增量,圖7 給出了交會軌跡。 偏心率越大則終端位置誤差越大,同時軌控速度增量也越大。 但是,終端位置誤差均小于20 m,而軌控速度增量的散布也小于1 m/s。

圖7 近距離交會飛行軌跡(e=0.01)Fig.7 Flight trajectory of the near-range rendezvous phase (e=0.01)

表10 近距離交會段綜合制導結果Table 10 Guidance result of the near-range rendezvous phase
可見,采用分段使用LAMBERT 制導和C-W制導的綜合制導策略,在不過多增加燃料消耗的同時,可適應不同目標器軌道。
6 結論
本文針對載人登月交會需要適應近圓和橢圓等不同軌道,同時對快速性、自主性和安全性要求極高的特點,通過月球軌道環境下就不同制導律性能進行分析比較,對近距離交會制導策略進行設計。 研究表明:在尋的段交會任務中,LAMBERT 制導的通用性好,精度也滿足工程設計要求,綜合性能更具優勢;而在接近交會任務中,CW 制導的通用性更好,綜合性能更優。 因此,合理采用LAMBERT 制導結合C-W 制導分段使用的綜合制導策略是載人登月任務近距離交會的可行方案。
隨著深空自主導航精度的提高和星載計算能力的不斷提升,采用LAMBERT 制導、C-W 制導、T-H 制導,設計性能更為優越的近距離交會綜合制導策略將成為可能,后續會繼續深入研究。
