基于無人機+復合纖維結構開展自主建造的技術探索
2022-11-07 08:29:20孫佳攀范冰冰張憶萌
科技創新與應用 2022年31期
孫佳攀,范冰冰,張憶萌
(華北水利水電大學 烏拉爾學院,鄭州 450000)
隨著建筑產業勞動人口拐點的到來和人工成本的不斷上漲,以及對于高效生產、安全作業、精細化施工和實現建筑產業現代化的需求,以建筑機器人為主要代表的新型裝備和施工工藝的技術變革正在成為我國實現建筑產業性能化、集約化和可持續化發展道路上的主要研究對象與方向[1]。無人機作為一種新型的機器人因其具有可以飛行的高自由度而備受關注,與之相關的無人機自主建造技術成為全球智能建造領域的前沿研究與關注熱點。無人機自主建造技術是基于無人機機載Dronekit系統自主飛行技術與數字建造平臺Grasshopper相結合的新型建造技術,近些年來在國內外研究團隊的探索與試驗中,該技術已經取得了一定的成果并完成了相關應用的初步實踐。
1 無人機自主建造技術的相關研究
1.1 國外關于無人機自主建造技術的相關研究
無人機是當前機器人制造領域的重要研究對象,其在建筑領域已經被廣泛應用在場地勘探、三維建模及物料運輸等方面,但這些工作方式大多是基于無人機操作員的手動操作來進行控制,而近年來隨著無人機定位和其自主控制技術的逐步成熟,美國和瑞士等國家的高校團隊最早開始了關于無人機自主建造技術的相關研究。2012年,賓夕法尼亞大學工程學院的Vijay Kumar教授團隊完成了以磁鐵為連接的簡單梁柱系統的無人機建造[2];2014年,蘇黎世聯邦理工學院的Gramazio Kohler和Raffaello d'Andrea團隊在瑞士完成了名為“The Flight Assembled Architecture Installation”的無人機建造項目,該團隊利用了4臺交替不斷起落的無人機編隊,將1 500個定制的輕型泡沫磚利用飛行器搬運、砌筑、組裝,最終完成了1個近6 m高的塔形磚砌結構建造[3];2015年,蘇黎世聯邦理工學院的AmmarMirjan教授團隊完成了無人機自主纏繞的空中“編織”簡單的拉伸結構試驗[4];2018年,比利時魯汶大學的數字化研究團隊開展了在真實尺度建造工程中利用無人機的試驗性研究,并創造性地提出了一種類似樂高砌塊組合的建造策略[5];2018年,德國斯圖加特大學的數字化建造團隊利用無人機通過電誘導磁鐵吸附等連接技術,將自主研制的多個由桿件建構的多面體結構進行拼接與組合,從而完成了1個可以通過無人機自主建造現場反復拆裝的多變裝置[6]。2022年,英國工程和物理科學研究委員會的Ketao Zhang博士團隊利用無人機設備3D打印出1個2.05 m高,并由72層快速固化的絕緣泡沫材料組成的圓柱體及1個0.18 m高,由28層結構假塑性水泥材料組成的圓柱體。這是世界上首個實現無人機3D打印建造的實例[7]。
1.2 國內關于無人機自主建造技術的相關研究
雖然我國的無人機技術在國際范圍內屬于領先水平,并且其在多個領域內得到了廣泛應用,但是對于無人機自主建造方面的研究并沒有過多重視,所以可查詢到的相關研究寥寥無幾。當前國內對于無人機自主建造的研究主要有2019年以袁烽老師為核心的同濟大學與一造科技相關團隊在第九屆Digital FUTURES數字設計國際工作營開展了無人機離散結構自主建造的相關試驗。該試驗提出并實現了一種適用于無人機自主建造的建筑形式原型,該原型可以通過無人機靈活的機動性落實豐富多變的離散結構。該實驗由2架自制機械抓手的F450規格自組裝四旋翼無人機交替運行,用時5 h最終完成了由18個菱形正十二面體的離散體構件堆砌而成的裝置。該裝置高約1.5 m,通過電誘導磁鐵吸附連接在一起。該建造過程實現了無人機自動化建造,從現場飛行準備到砌筑全部部件均由無人機自主完成,試驗所創造的建造原型與工作流程具有一定的可行性與拓展性,并為無人機在未來大尺度離散結構的現場裝配技術提供了早期有效的技術初探與發展指導[1]。
經過國內外相關研究團隊在10多年間的試驗探究(如圖1所示),已經初步建立起無人機試驗的技術框架與試驗路線,為本次試驗提供了寶貴的經驗與指導方針,確定了技術的基本框架邏輯,為試驗的初步進行提供了思路。

圖1 近年來國內外開展的無人機建造相關試驗
2 無人機自主建造技術的系統框架研究與搭建
2.1 系統框架的研究與搭建
無人機自主運動系統的控制是一項非常繁雜的項目,其需要多終端、多傳感器的協同配合運行。在系統框架的搭建過程引入SSH(安全外殼協議)連接協議將建筑師傳統的數字設計平臺Grasshopper與無人機的機載電腦Rasbarry Pi4B實現數據傳輸,從而溝通起了Windows和Linux操作系統。其多API(應用程序編程接口)接口的特性為無人機未來機載更多傳感器提供了可能。無人機的運動控制是以Dronekit(無人機工具箱編程模塊)控制Pixhawk(飛行控制器品牌)飛控系統,并通過在WSL(適用于Linux的Windows子系統)系統下搭建軟件在環仿真SITL(無人機軟件仿真系統)系統,對在Grasshopper系統內預規劃好的無人機飛行路徑進行規劃模擬飛行,并通過二維QGroundControl地面站和微軟基于UE4(虛幻4引擎)開發的三維模擬系統Airsim(自動駕駛仿真)對模擬進行實時監控以此來對無人機飛行進行虛擬仿真從而降低未來真實飛行對無人機的損耗與誤差。在此基礎上所搭建起的適用于無人機建造復雜場景的自主建造技術框架主要由無人機路徑規劃系統、機載控制系統與無人機仿真模擬系統3部分組成。無人機的路徑規劃系統由Rhino和Grasshopper作為主要的路徑規劃工具對無人機在三維空間的飛行進行了可視化的路徑規劃。通過GHpython(蚱蜢軟件內部置入的編程模塊)將相關數據打包到本地計算機,通過調用SSH連接協議自動發包到機載Rasbarry Pi電腦上。機載控制系統則通過調用本地Dronekit(無人機工具箱編程模塊)程序對發包來的程序進行調用,從而可以通過MAVLINK控制機載飛控系統PIXHAWK利用機載的姿態傳感器,其包含了陀螺儀、加速度計、磁力計、氣壓計和空速計等傳感器系統,用于對無人機實時局部姿態信息進行實時監控與處理。無人機仿真模擬系統可以在WSL(適用于Linux的Windows子系統)系統內對無人機飛行路徑與狀態進行仿真模擬,并通過地面站對其進行二維監控,此外也可以通過基于UE4平臺開發的Airsim三維模擬系統對其飛行路徑進行三維角度的空間模擬(如圖2所示)。
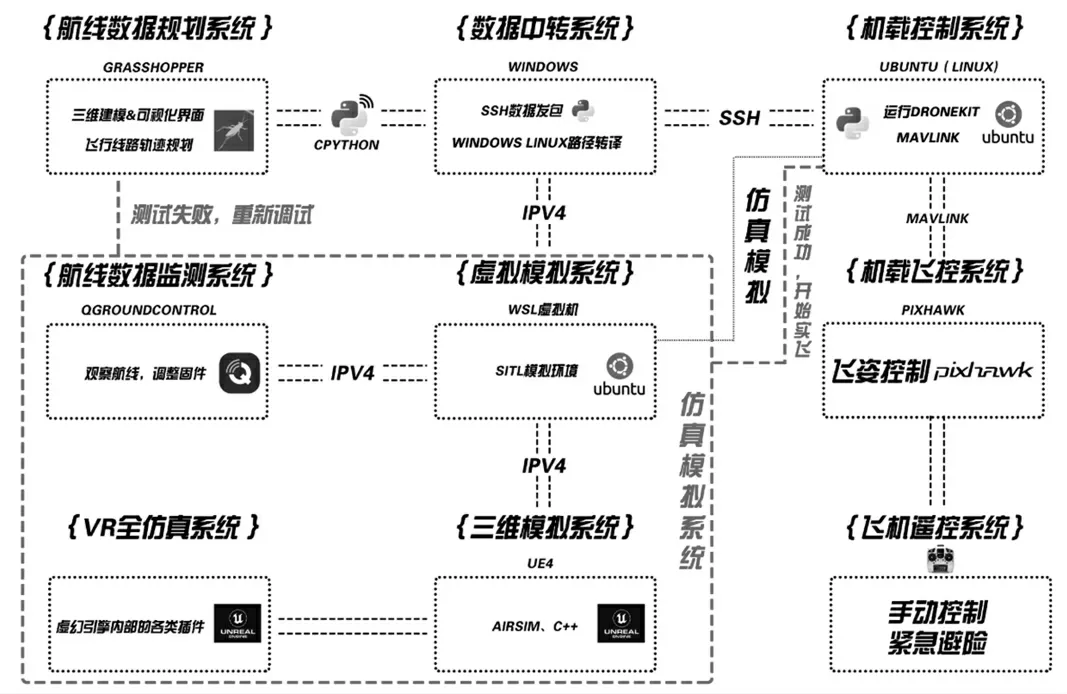
圖2 無人機建造系統框架圖(作者自繪)
2.2 自制無人機的構造設計與系統調試
無人機獨特的自主運動模式對無人機自主建造技術有著基本的設計約束,這也使得無人機在構造層面具有模板化的特點,不能進行大幅度改造。能夠實現自主建造的自制無人機主要由3部分構成,分別是動力系統、飛行控制系統與工具端(如圖3所示)。動力系統主要由電池、電機和螺旋槳構成,為無人機的升空與其他系統的運行提供了動力支持。飛行控制系統由機載電腦、飛控、傳感器與接收器構成,用于檢測無人的飛行狀態,確定無人機的實時位置,接收無人機的工作命令,穩定飛行器的姿態及控制無人機運動等。工具端則是無人機具體工作的作用部分,根據工具端搭載工具的不同可以完成攝像、噴灑液體及搬運實體等不同任務。不同系統部分當中,飛行控制系統在復雜的現場建造環境中受到了最大的威脅與挑戰,其系統內部的傳感器精度與結構工件的特性及施工高度所帶來的地面效應都會影響到無人機實時運動精度。在自主飛行的模式下如果沒有對誤差進行及時地更正與消除就會疊加與累積,從而難以實現毫米級的穩定懸停,甚至造成嚴重的飛行事故。因此,無人機的構造設計與系統調試應該重點對無人機的控制系統進行改進,以允許一定的誤差,并對誤差進行及時消除與更正。在本試驗當中,無人機機架主體是在F450機架的基礎上改進而成的,搭配了Pixhawk2.4.8飛控及Rasberry4B,在自主搭建的技術系統框架下經過反復的虛擬仿真模擬試驗進行調整,并通過機外的可追蹤全站儀定位系統進行飛行數據的檢測,以進行飛行位置的實時校對來降低飛行的誤差。工具端則搭載了可調舵機驅動下的自動繞線輪,制造出了可以實現3 cm誤差范圍內的可調節的線性纏繞工具端。
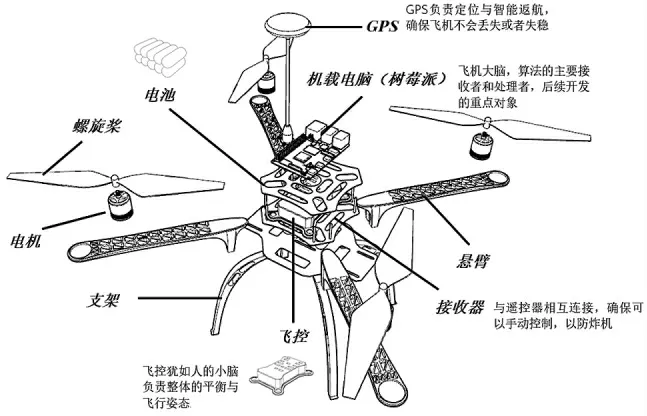
圖3 自制無人機拆解圖(作者自繪)
2.3 現場工作環境建立
本研究試驗中的完整工作環境由徠卡TS60全站儀、無人機起落架、送料口、充電器和安全網等組成。裝置建造試驗選在某學校實驗室,實驗室層高4 m,試驗區域面積約為5 m×6 m。試驗主體為2個相距2.5 m的1.5 m高鋁制架子構成,2個架子上分別有0.9 m×0.9 m的方框,方框上焊接有多個5 cm長的繞線柱(如圖4所示)。
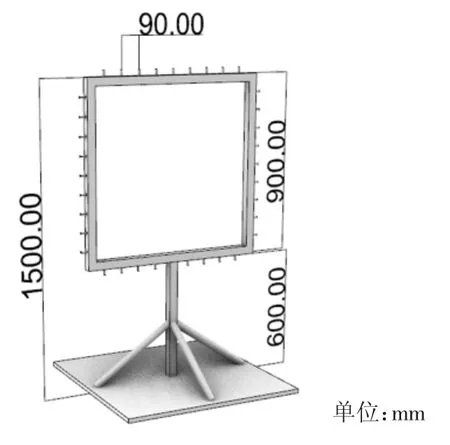
圖4 自制鋁制架子尺寸圖(作者自繪)
3 適用于無人機自主建造技術復合纖維結構的設計研究
3.1 無人機自主建造技術下復合纖維材料設計
在同一根纖維截面上存在2種或2種以上不相混合的聚合物纖維,這種纖維稱復合纖維,因其具有較好的抗疲勞性能和力學性能,被廣泛地應用于多個領域。在無人機的自主建造過程當中,因其飛行速度相對較快,飛行角度變化大,飛行所產生的升力、拉力相對較大及飛機自身的荷載能力有限,故需要比強度和比剛度較大、減振性能良好、抗疲勞性能好和具有良好力學性能的復合纖維材料。在經過查找相關資料后發現,由德國斯圖加特大學發明的一種無芯碳纖維增強復合纖維具有上述優勢,其無芯結構減少了自身的自重,碳纖維的材料特性使其具有良好的抗疲勞能力和力學性能。
3.2 空間纏繞整體形態設計
多層纖維疊層的數字找形過程是十分復雜的,且最終的找形形態也只能在一定程度上表現現實的結構形態。因此,在Grasshopper中采用按比例縮放的物理模型來進行整體建造過程的基準測試和驗證。將其纖維纏繞路徑在軟件中模擬后,通過Grasshopper的力學模擬插件對其進行力學模擬,從而用于評估多層纖維疊層的力學形態與結構性能(如圖5所示)。
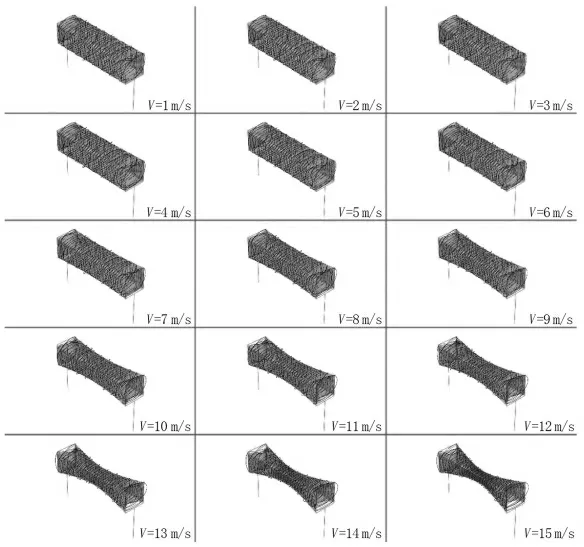
圖5 無人機不同飛行速度下的纖維結構力學形變圖(作者自繪)
4 無人機現場復合纖維結構建造技術
軌跡規劃是無人機自主建造的首要步驟。在本研究中,基于復合纖維結構的自主建造路徑規劃是通過Grasshopper軟件下搭建的計算性設計系統,通過分析復合纖維結構的線形結構并通過Grasshopper運算器的處理將結構中的空間點坐標轉換為帶有時間戳的數組(如圖6所示),其中包含無人機的空間坐標信息和姿態角度信息航點等相關參數,并將參數以全局坐標信息的格式打包發送至無人機的機載電腦,機載電腦當中的Dronekit(無人機工具箱編程模塊)系統通過對相關參數進行分析發送指令給飛控從而控制無人機自主飛行,不同系統間的實時通信保證了無人機安全地進行自主飛行,并可進行實時調整與控制。在該系統當中,基于復合纖維結構下的無人機建造運動軌跡是根據其生成規則自動生成的,該系統具有較強的普適性,可以滿足不同設計師對于造型的不同需求,并通過虛擬仿真系統進行快速的調試與修改。無人機的運動是通過機架懸臂頂端的4個電機帶動螺旋槳進行飛行的,因此其在不同方向的飛行運動可能會存在一定的誤差,從而導致實時的飛行路徑會與計算模擬的飛行路徑之間存在偏差,此時就需要機外監測系統對無人機的實時位置進行監測,并將此飛機位置數據反饋給地面的航線監測系統。地面的監測系統通過可視化信息將自主建造的全過程信息保存記錄并實時反饋。系統根據結構設計中的纏繞路徑航線點位的參數,分析其飛行的航點順序、速度與方向等,生成一系列的實時控制指令控制無人機進行自主飛行,最終實現基于復合纖維結構下無人機全過程自主建造的試驗(如圖7所示)。
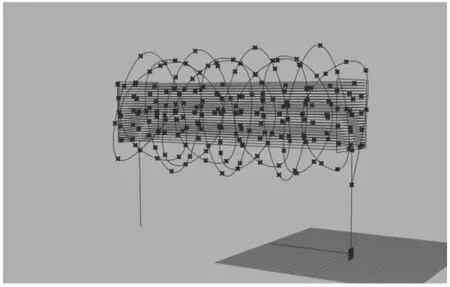
圖6 無人機飛行軌跡規劃圖(作者自繪)
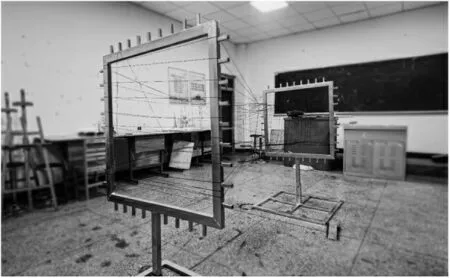
圖7 無人機纖維纏繞成果圖(作者拍攝)
5 結束語
在以無人機為試驗對象的現場建造研究背景下,本試驗提出并實現了基于復合纖維結構下適用于無人機自主建造的原型結構設計,建立并完善了關于復合纖維結構的形態設計方法及其通過計算機系統生成相關建造飛行路徑,并生成相應的航點參數進行航線的規劃與飛行控制,以及適合于復合纖維結構自主建造的無人機的構造設計與相應系統調試關鍵技術。本試驗用時3 h,完成了2個相距2.5 m的1.5 m高的鋁制架子的纏繞裝置。該建造過程實現了無人機自動化建造,從現場飛行到纏繞纖維全部由無人機自主完成。試驗所研究的復合纖維結構原型的找形過程與生成邏輯具有一定的可行性與拓展性,在未來可以為相關研究提供初步的方向引導,并為無人機未來在更大尺度的復合纖維結構的現場建造技術提供了早期的技術初探與發展指導。同時該試驗也體現了無人機存在續航能力弱、飛行精度低、建造誤差較大和控制系統較為復雜等問題,這些問題的逐步解決需要多學科的共同發展與進步。無人機未來將會為數字建造領域注入新的活力,其相關的技術突破還需要跨專業與多學科的前沿團隊展開更加深入的合作與探索。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
科技傳播(2019年22期)2020-01-14 03:06:54
裝備制造技術(2019年12期)2019-12-25 03:06:46
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
