基于ABB 機器人視覺引導抓取的應用
2022-11-07 02:16:24高建森宋懿群黃衛平
汽車電器 2022年9期
高建森,王 寧,宋懿群,黃衛平,劉 陽
(杭州吉利汽車有限公司,浙江 杭州 311228)
隨著近年來汽車行業自動化技術的不斷創新發展,新的智能制造技術不斷引入。傳統汽車行業機器人的搬運方式,一種為從定位夾具上精確取件,這種方式效率低下,人員上件操作工作量負荷增加;另外一種為集中式精定位小車的上件方式,此種方式對精定位小車要求非常高,精定位小車精度的維護要求也極其高,造成成本增加。利用精定位小車與視覺相結合的方案,大大提高了機器人精確搬運的成功率,保證了車身精度。同時精度也不需要很高的維護要求,大大提高了裝配等工藝精度。利用視覺檢測技術及機器人運動控制原理,實現零件的3D定位,通過測量比對標準模板零件的特征數據,引導機器人根據實際測量零件的位置變化調整機器人的運動軌跡,滿足精確抓取零件的需求。該工藝的推廣應用具有重要的理論和實踐指導意義。目前視覺系統技術的核心部件及算法掌握在國外,價格居高不下,多為實力雄厚的大型企業在使用,在小微企業市場領域還有很大的發展空間。
1 視覺搬運工藝布局及主要設備
1.1 工藝布局
本文車間的視覺系統集成于ABB機器人抓手上,根據不同的應用環境,為了提高生產效率,機器人抓手上也可集成多個攝像頭,用于多個特征點的測量。本工位為重點工藝控制工位,要求機器人自動涂膠必須精確,否則影響車身密封性,造成漏水現象。主要設備布局由工位夾具、視覺機器人、涂膠設備、精定位小車等組成。當精定位小車放置區有零件時,機器人啟動抓取零件程序,機器人移動至測量位置,視覺系統啟動測量程序測量零件特征點,通過校正后,準確定位零件工藝孔,抓取零件并進行精確涂膠作業。工藝布置如圖1所示。
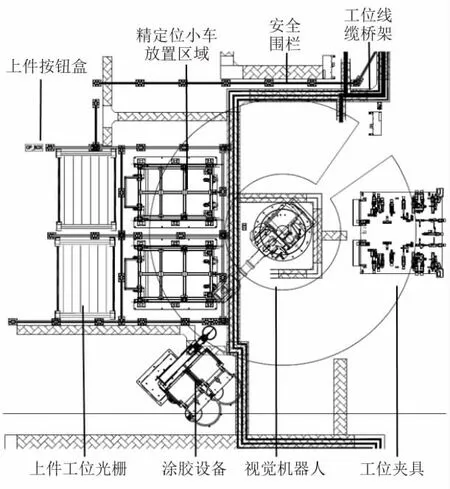
圖1 視覺搬運工位布置圖
1.2 主要設備及參數
1)機器人。本文視覺應用中使用ABB品牌IRB6700-245/3.00型機器人,如圖2所示,6關節軸機器人,負載能力245kg,工作范圍3000mm,手腕扭矩1693Nm,機器人重復定位精度0.1mm。ABB機器人控制系統配備IRC5控制器,并配有手持式操作員裝置Flex Pendant,用于人機交互,便于執行操作、修改、移動機器人等任務。

圖2 ABB IRB6700-245/3.00機器人
2)視覺系統。本文的視覺系統采用3D視覺,檢測6個自由度,此測量系統至少包含一個攝像頭傳感器單元來執行。本3D視覺系統包含了裝有視覺軟件的PC和固定于機器人抓手上的傳感器及閃光燈。視覺系統軟件具有配置傳感器與機器人的I/O信號通信,配置傳感器并激活傳感器,配置零件數據的特征模型,如零件名稱及ID號,同時激活配置好的零件數據模型,設置測量偏差等功能。傳感器通過Profinet網絡與機器人進行數據交互,詳細結構如圖3所示。

圖3 視覺系統構圖
3)精定位小車。用于車身焊裝生產線零件上線與下線,與機器人自動抓放件配合使用的小車。精定位小車主要由地面定位系統、小車框架、板件定位系統組成,如圖4所示。地面定位系統使用地腳螺栓固定于地面上,配置有X,Y方向定位裝置。小車框架由基準孔、基準板、導向輪等組成,主要定位板件X,Y,Z方向。板件定位系統主要采用定位銷、支撐塊、限位塊的方式進行定位,定位精度0.1mm,X,Z向定位精度1mm。
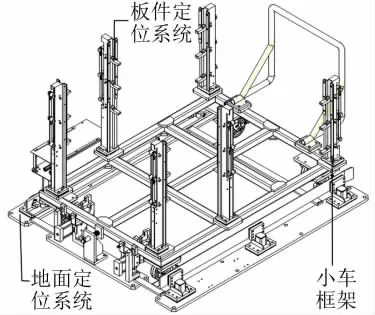
圖4 精定位小車示意圖
2 視覺機器人控制過程
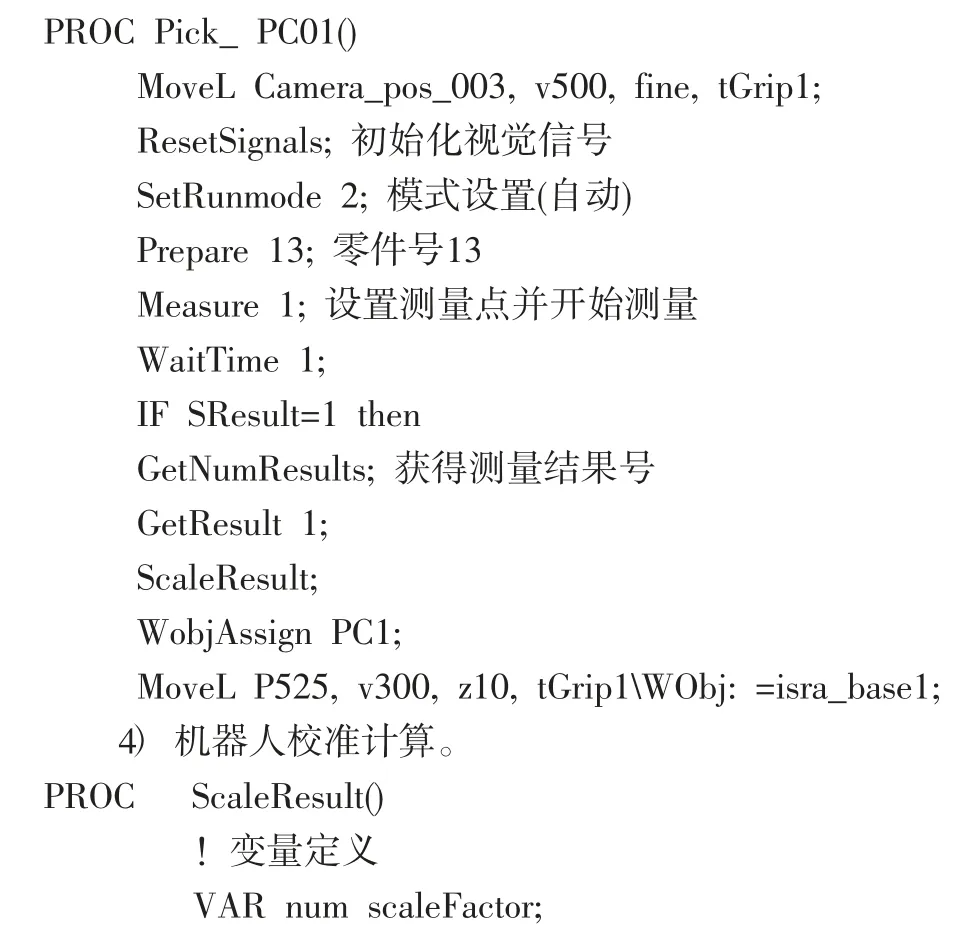
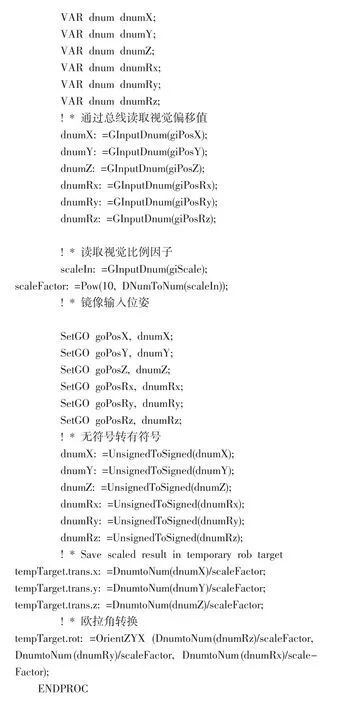
本文案例為某先進汽車公司焊裝車間后地板視覺機器人搬運系統,整個區域網絡架構采用西門子Profinet網絡,由PLC作為主站,機器人作為從站進行控制,視覺系統作為機器人從站進行控制。首先由PLC發送車型給機器人后,機器人收到PLC 發出的運行指令,判斷精度料架中工件處于測量范圍內,機器人根據車型信息執行抓件動作,過程中由視覺系統測量零件預設參考位置,在機器人測量位姿進行測量。然后根據視覺系統測量結果,由視覺系統計算與零件特征數據模型進行對比并計算出特征點X,Y,Z,Rx,Ry,Rz 6個自由度的糾正值,并將糾正值giPosX,giPosY,giPosZ,iPosRx,giPosRy,giPosRz發送給機器人,機器人通過程序邏輯計算由歐拉角轉換為ABB機器人可以識別的四元素位姿結果,最后通過機器人的位姿執行相應糾正,從而達到精確抓取件。控制結構如圖5所示。
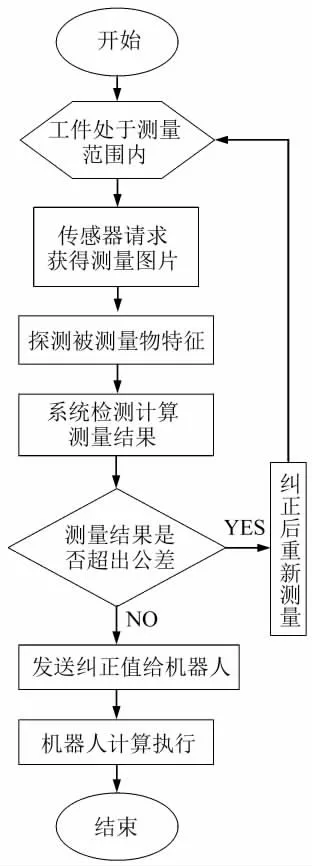
圖5 控制結構圖
3 視覺測量方法及實現過程
視覺測量利用拍照式3D視覺引導傳感器實現零件的3D定位抓取,引導機器人根據被操作工件的位置變化調整機器人工作軌跡,滿足零件抓取精度的要求。
3.1 視覺的測量方法
1)拍照式3D定位。利用相機進行拍照,通過提取零件特征和特征匹配,并結合特征之間的相對位置信息,獲取零件位置信息,實現零件位置定位在參考x,y,z方向上的移動及Rx,Ry,Rz方向上的旋轉。如圖6所示。

圖6 零件特征
2)定位原理。基于點特征的拍照式位姿(例如零件特征孔)確定方法,通過標定后的相機對特征目標拍照,利用目標圖像上多個非共線特征點的圖像坐標,以及特征點在空間中相對位置關系,建立目標約束方程,求解目標與相機間的相對位置和相對姿態。如圖7所示。
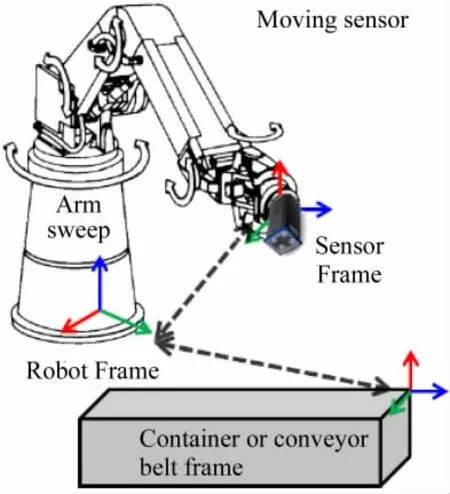
圖7 坐標系
3)視覺系統測量時序。
4 實際應用
視覺技術廣泛應用于汽車制造領域,例如車身制造中的后地板取件。根據實際需要可以規劃多個上料口,每個上料口可配備多個精度小車。機器人在固定位置進行拍照,根據視覺計算的結果將每次的偏差值發送給機器人,機器人通過計算偏差值,自動調整相應抓取位置坐標,以保證機器人每次能夠精準抓取板件,有效提高生產節拍稼動率。視覺技術在工廠實際應用節拍可高達36JPH。在汽車制造廠的售后統計中視覺應用存在拍照偏差過大、定位偏差、設備損壞無備用方案等問題,是視覺系統在汽車制造業存在問題點導致故障停機的關鍵指標因素。視覺拍照引導對料車的加工精度、定位精度要求較高,定位機構需要定期進行三坐標測量。車身制造領域產能要求高,開動率指標要求在95%以上,后地板面積超過1.5m,較軟,供貨尺寸波動較大,拍照結果頻繁超出范圍,通過上文的介紹,應用可適當調整拍照偏差、定位偏差等因素導致設備損壞等問題。視覺系統在汽車制造業中涉及自動涂膠識別、抓件抓取、基準定位,得到廣泛推廣應用。
5 結論
機器人與視覺控制技術相結合,通過精確定位識別實現視覺引導,極大地提高了整車精度,因此機器視覺技術已廣泛應用于更加精密制造生產線,絕大多數提高了智能制造裝備的制造水平,在提高汽車、電子、醫藥、化工等領域精確、精密制造過程中發揮著巨大的作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
家庭影院技術(2017年9期)2017-09-26 03:41:45