機載LiDAR與傾斜攝影測量在地質(zhì)災(zāi)害中的應(yīng)用
2022-11-04 05:50:16張小青
北京測繪 2022年10期
關(guān)鍵詞:模型
張小青
(福建水利電力職業(yè)技術(shù)學(xué)院 水利工程系, 福建 永安, 366000)
0 引言
地質(zhì)災(zāi)害給人們生命財產(chǎn)安全造成巨大損害,傳統(tǒng)的人工調(diào)查效率低,安全風(fēng)險大、監(jiān)測不全面、難于有效識別。因此,如何快速準確地評估地質(zhì)災(zāi)害信息,更早地識別潛在的地質(zhì)災(zāi)害隱患是災(zāi)害調(diào)查研究中的難點之一。近年來,不斷發(fā)展的無人機航攝技術(shù)逐漸成為地質(zhì)災(zāi)害應(yīng)急的主要技術(shù)之一,較傳統(tǒng)測繪而言,無人機航攝技術(shù)機動性強、現(xiàn)勢性強、精度高等優(yōu)勢,能滿足地質(zhì)災(zāi)害應(yīng)急的時效性和精度要求。運用無人機航攝技術(shù)獲得地質(zhì)災(zāi)害的高分辨率三維模型,從而進行量測與分析處理,獲取地質(zhì)災(zāi)害體的坡度、坡向、粗糙度等地貌參數(shù),可為地質(zhì)災(zāi)害的搶險救災(zāi)提供重要的決策支持。
地質(zhì)災(zāi)害專家許強等[1]提出了基于天空地一體化的“三查”體系。鄭史芳等[2]基于無人機傾斜攝影獲取的影像,建立高分辨率三維模型以及數(shù)字正射影像模型,通過實景三維模型可以直觀地再現(xiàn)地質(zhì)災(zāi)害隱患點的地形地貌信息,為地質(zhì)災(zāi)害隱患點預(yù)警提供有力的依據(jù)。詹美斌[3]改進無人機三維建模算法,運用無人機傾斜攝影數(shù)據(jù)和地質(zhì)應(yīng)力探頭數(shù)據(jù)進行數(shù)據(jù)融合,生成逐點地質(zhì)災(zāi)害風(fēng)險評估結(jié)果。趙博[4]結(jié)合無人機傾斜攝影技術(shù)和地質(zhì)調(diào)查,建立了地質(zhì)災(zāi)害三維管理平臺。禹信等[5]采用無人機遙感獲取泥石流災(zāi)害影像,基于地理信息系統(tǒng)技術(shù)(geographic information system,GIS)提取泥石流災(zāi)害信息。Julie A等[6]運用衛(wèi)星影像和無人機傾斜影像數(shù)據(jù)評估加拿大落基山脈土地覆蓋變化,發(fā)現(xiàn)與衛(wèi)星圖像相比,傾斜的照片更容易檢測到狹窄的景觀特征,估計出的巖石比例更高。Rossi G[7]采用無人機配備了光學(xué)攝像機,利用運動恢復(fù)結(jié)構(gòu)(structure from motion,SfM)軟件對航空紅綠藍(red、green、blue,RGB)圖像進行分析和組合。通過對獲得的數(shù)字地形模型(Digital Terrain Model,DTM)進行對比分析,可以對探測到的滑坡進行精確的重建和測繪。Nichol J E等[8]利用IKONOS立體衛(wèi)星影像對滑坡地質(zhì)災(zāi)害進行評估分析,從立體圖像創(chuàng)建的數(shù)字高程模型(digital elevation model,DEM)比運用等高線數(shù)據(jù)創(chuàng)建的DEM對微尺度地形特征更加準確和敏感,更能提高滑坡地質(zhì)災(zāi)害解譯的效率。De Beni E等[9]應(yīng)用無人機監(jiān)測活躍的熔巖流,對埃特納火山(意大利)南側(cè)3 050~2 600之間的熔巖流場進行了兩次高分辨率無人機調(diào)查,獲得熔巖流的正射影像圖,為研究活動熔巖流提供了一種新的技術(shù)手段。Sestras P等[10]利用無人機傾斜攝影技術(shù)、GIS空間分析技術(shù)在易受影響城市環(huán)境的淺層滑坡和侵蝕的可持續(xù)管理中進行大地測量。
上述文獻多數(shù)是基于無人機傾斜攝影技術(shù)實現(xiàn)地質(zhì)災(zāi)害信息提取,而將傾斜攝影技術(shù)、機載雷達以及地質(zhì)勘測設(shè)備等多種技術(shù)結(jié)合應(yīng)用于災(zāi)害點特征信息的提取不多。文章利用無人機載激光雷達(light detection and ranging,LiDAR)和傾斜攝影技術(shù),結(jié)合地質(zhì)勘測設(shè)備,豐富翔實的監(jiān)測數(shù)據(jù)可為地質(zhì)災(zāi)害的監(jiān)測提供更真實、有力的數(shù)據(jù)支撐。
1 研究區(qū)概況和數(shù)據(jù)獲取
1.1 測區(qū)概況
研究區(qū)水電站(圖1)位于尤溪流域的下游,壩頂總長260 m,壩頂高程92 m,設(shè)計最大壩高32 m,壩頂寬5.505 m。評估區(qū)屬低山丘陵地貌,兩岸山坡高差較大,地形坡面在20°~40°。研究區(qū)地形起伏變化較大,變化幅度高差大于80 m,且測量范圍內(nèi)為密集的樹林,分布灌木叢林,除水電站建筑外,周邊分布較多構(gòu)筑物。該水電站樞紐區(qū)左岸區(qū)域,長度約0.9 km,面積約0.23 km2。水電站樞紐區(qū)右岸區(qū)域,長度約0.8 km,面積約0.06 km2。
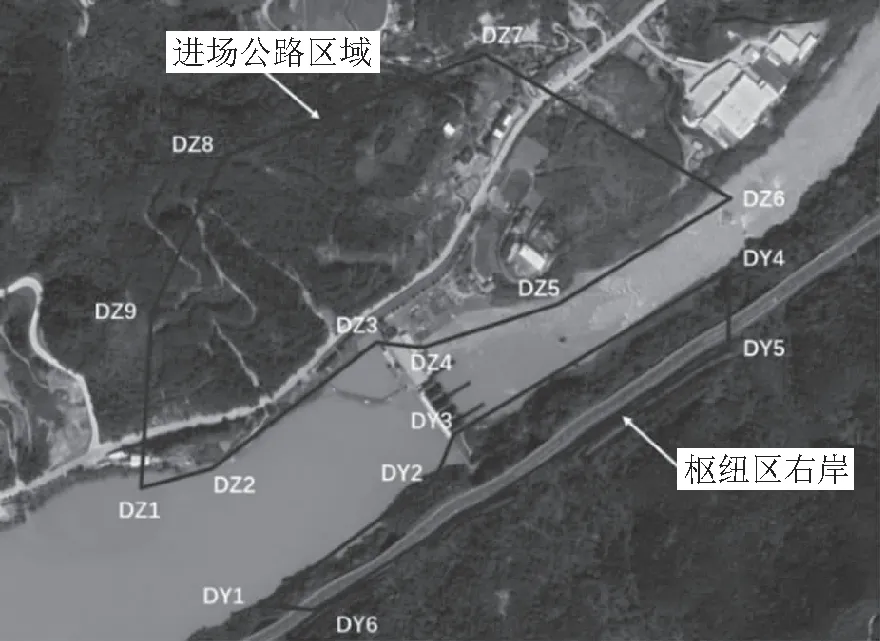
圖1 水電站工作范圍
1.2 數(shù)據(jù)獲取
將無人機遙感技術(shù)和無人機載LiDAR相結(jié)合,能夠獲得更豐富、更真實的災(zāi)害點的地形影像數(shù)據(jù),具體工作流程如圖2所示。
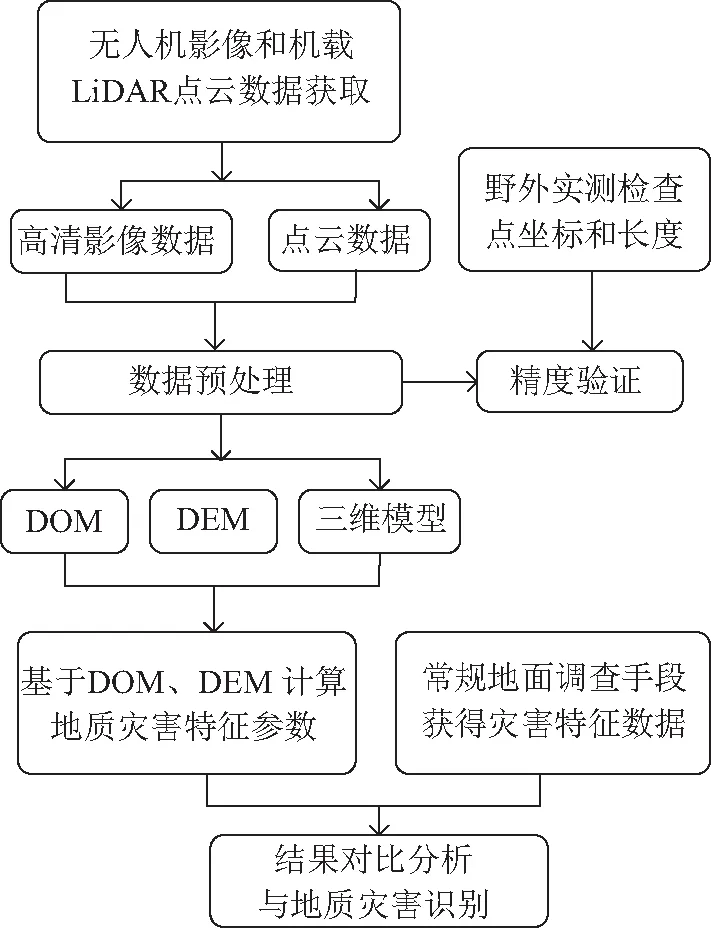
圖2 工作流程
1.2.1傾斜攝影數(shù)據(jù)獲取
收集各種地形和氣象資料,根據(jù)三座水電站的工作范圍,設(shè)定航攝范圍,并根據(jù)測區(qū)的高程信息和成圖比例尺的要求,進行航飛分區(qū)規(guī)劃及航線設(shè)計。選擇適飛的天氣條件和時間前往測區(qū)開展無人機航攝,以保證航攝時有充足的光照和最小的地物陰影,使影像獲得最佳的清晰度和亮度。航攝的影像經(jīng)過飛行質(zhì)量檢查和影像質(zhì)量檢查通過后方可結(jié)束航拍工作,否則需根據(jù)實際情況進行局部區(qū)域重飛或補飛。
本次作業(yè)航拍范圍按原確定的范圍線外擴50~100 m,按航線長度不大于2 km進行分區(qū)設(shè)計,由無人機飛控軟件根據(jù)測區(qū)范圍自動進行航線的規(guī)劃,按攝區(qū)走向直線方法敷設(shè),平行于攝區(qū)邊界線的首末航線必須確保視鏡頭能獲得有效點云。無人機獲取的數(shù)字表面模型(digital surface model,DSM)、數(shù)字正射影像圖(digital orthophoto map,DOM)、數(shù)字線劃圖(digital line graph,DLG)如圖3所示。
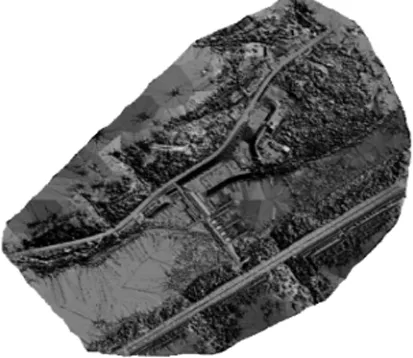
(a)研究區(qū)DSM模型 (b)研究區(qū)正射影像圖DOM
1.2.2機載LiDAR數(shù)據(jù)獲取
由于水電站的周圍地形有許多的高山,以及植被覆蓋率高,機載激光雷達可以透過植被,測量植被覆蓋下的地形可以在被植被覆蓋的地方發(fā)現(xiàn)危險源,因此通過機載激光雷達可獲取高精度實景三維地形數(shù)據(jù),尤其對高山峽谷、高植被覆蓋區(qū)域以及人員無法到達區(qū)域,有得天獨厚的優(yōu)勢。對于坡度、曲率、匯水面等有較大優(yōu)勢,它有高精度位置與姿態(tài)測量系統(tǒng)(position and orientation system,POS)數(shù)據(jù)、高分辨率光學(xué)影像、高密度激光點云的特點,數(shù)據(jù)處理包括點云計算、平差以及去噪等預(yù)處理。機載激光雷達數(shù)據(jù)如圖3(d)所示。
2 結(jié)果與數(shù)據(jù)分析
為探索無人機傾斜攝影技術(shù)在地質(zhì)災(zāi)害應(yīng)用中的精度可行性,選取26個地面檢核點,采用GNSS-RTK測量方式利用千尋基準站實時差分信號,進行采集明顯實地地物點或地貌特征點的平面坐標和高程,成果點平面坐標在數(shù)字正射影像模型提取,利用DSM提取高程值,并進行空間坐標誤差分析和高程誤差分析。地物長度值的測量是以全站儀野外實測地物長度(如建筑物、道路標識線等),分別測得20組水平長度和垂直長度值為真值(T),三維模型場景內(nèi)量測對應(yīng)長度作為觀測值(O),計算差值Δ以及中誤差m,從而對水平長度和垂直長度進行精度評定。其計算[11-12]如式(1)所示。
(1)
檢核點的平面和高程方向的較差見圖4,ΔL為水平長度差值,ΔH為垂直長度差值,結(jié)果如圖5所示。從點位和長度統(tǒng)計結(jié)果可知,點平面和高程中誤差分別為0.037 m、0.042 m。最大誤差分別為0.049 m、0.058 m。平面方向和垂直方向的較差都滿足監(jiān)測要求,平面方向的坐標誤差較穩(wěn)定,垂直方向的誤差波動較平面方向偏大。
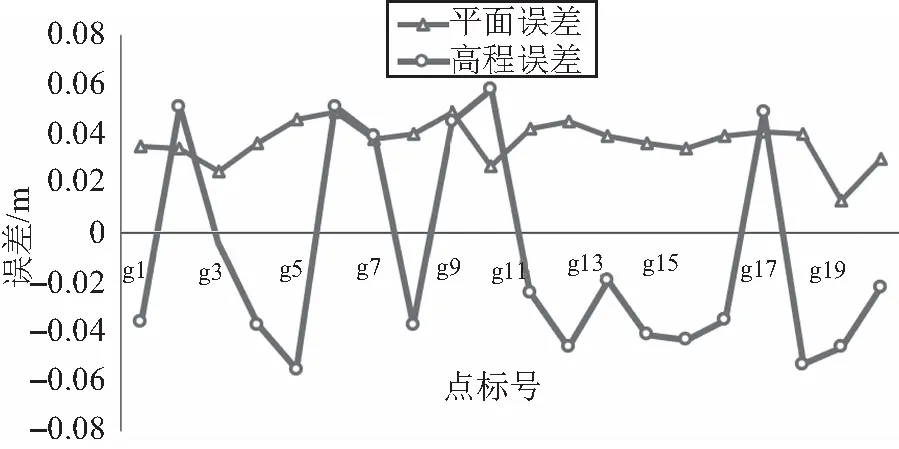
圖4 平面坐標和高程較差
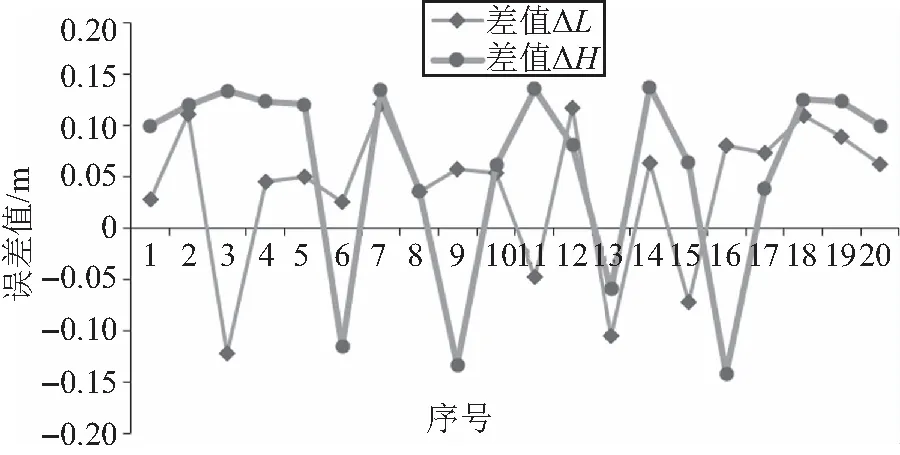
圖5 水平長度和垂直高度較差
3 地質(zhì)災(zāi)害危險性現(xiàn)狀評估
基于傾斜攝影及激光雷達獲取的實景三維模型,通過定性分析與定量提取,準確識別地質(zhì)災(zāi)害信息。結(jié)合現(xiàn)場確認,評估范圍內(nèi)主要地質(zhì)災(zāi)害類型為泥(水)石流(沖溝)、崩塌(危巖、落石),識別地質(zhì)要素信息,并分析了災(zāi)害發(fā)生后的影響范圍和物源源頭等信息。
3.1 結(jié)合地質(zhì)監(jiān)測手段,評估地質(zhì)災(zāi)害特征
基于真實地表的DEM數(shù)據(jù),提取地形地貌特征參數(shù),河流由南西流向北東,河谷寬闊,河床底寬約100 m。兩岸地形基本對稱,且亦相對較完整。壩址兩岸各發(fā)育兩條沖溝。高程66~70 m、85~90 m和100 m~107 m分別為Ⅰ、Ⅱ、Ⅲ三級基座階地。根據(jù)現(xiàn)場調(diào)查測繪,壩區(qū)主要的崩塌、危巖、溜塌潛在地質(zhì)災(zāi)害點特征如下:位于樞紐區(qū)左岸G235邊坡坡面,該處邊坡基巖主體以中風(fēng)化為主,坡面局部較破碎,并發(fā)育多組節(jié)理,主要節(jié)理有危巖,如危巖攝影圖(圖6)。如圖7可知,P1坡面,L1裂隙1,L2裂隙2。兩組節(jié)理關(guān)系如表1所示,兩組節(jié)理組合切割后,①、②兩組節(jié)理的交點與邊坡面投影弧在同一側(cè),且在坡面線外側(cè),說明結(jié)構(gòu)面組合交線的傾向與坡面傾向一致,但傾角小于天然坡角,在坡頂無出露點,屬于較穩(wěn)定結(jié)構(gòu)。故該處危巖危害程度小,危險性小。
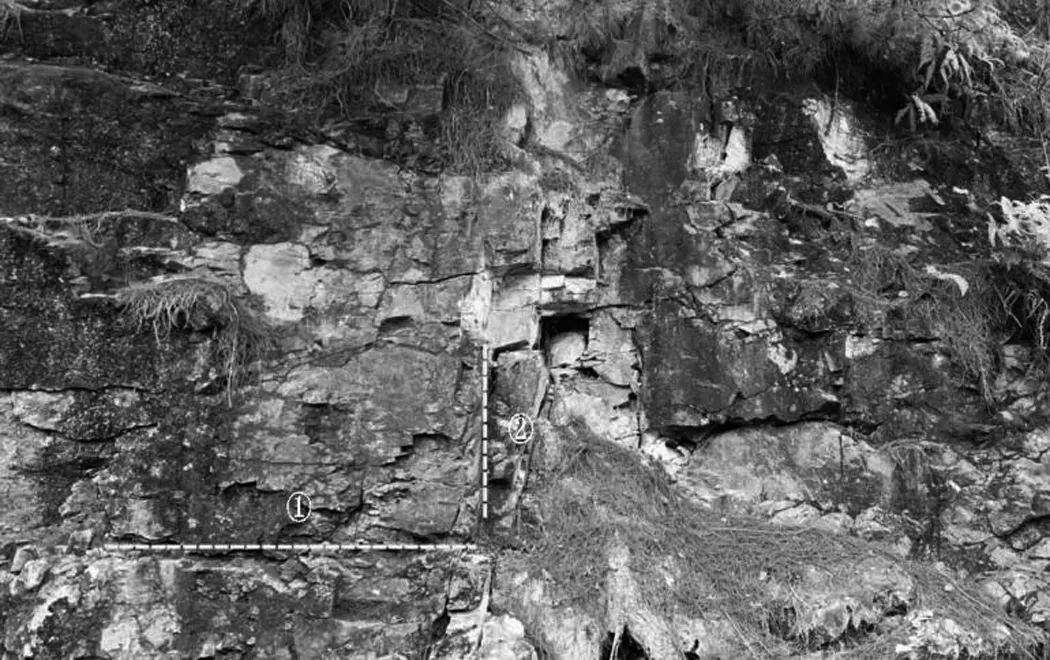
圖6 W1危巖攝影圖
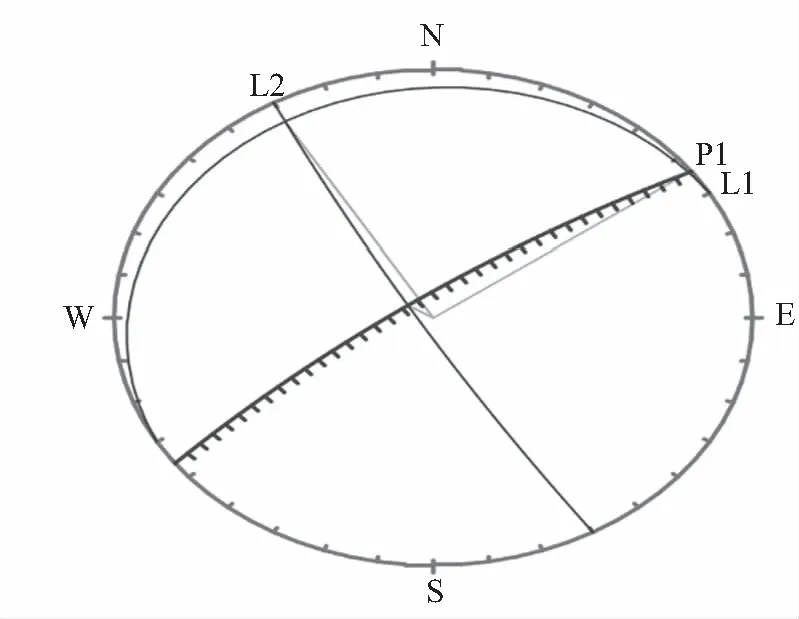
圖7 W1赤平投影圖
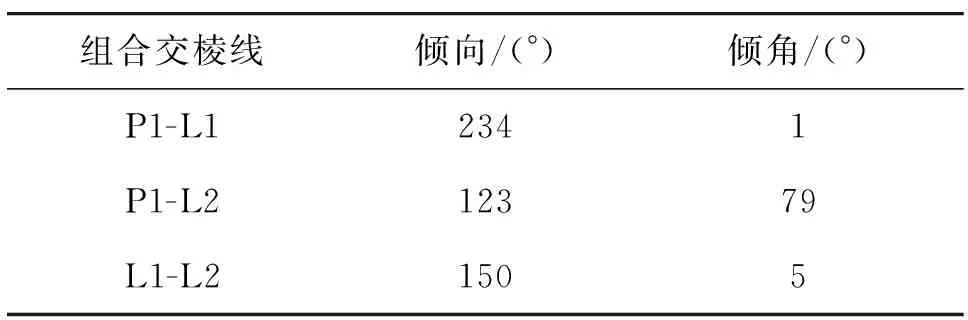
表1 節(jié)理關(guān)系
地形總體較完整、平順,坡面弱風(fēng)化基巖裸露較多,自然邊坡部分巖坡卸荷裂隙發(fā)育、巖體破碎;樞紐區(qū)兩岸人為活動的破壞,致使兩岸發(fā)生了許多不同程度的崩塌,尤其是左岸公路開挖,使壩上游發(fā)生多處庫岸的塌滑。開挖邊坡不利結(jié)構(gòu)面組合及坡面風(fēng)化卸荷產(chǎn)生有不少危巖,在強降雨、地震等條件觸發(fā)下可能發(fā)生小規(guī)模的崩塌、掉塊;因此,評估區(qū)兩岸山坡具備形成崩塌地質(zhì)災(zāi)害的地質(zhì)環(huán)境條件[13-15]。
3.2 解譯裂縫發(fā)育狀況
根據(jù)無人機航測獲取的正射影像數(shù)據(jù),解譯裂縫發(fā)育狀況。評估區(qū)內(nèi)沖溝具備了泥石流形成的地形地貌和水源條件,但泥石流物源貧乏,物源主要來自于溝谷兩側(cè)山坡殘坡積層的沖刷剝蝕,以及坡面零星分布的碎石,山坡植被茂密,覆蓋層薄,提供的物源極為有限。根據(jù)《泥石流發(fā)育程度量化評分及評判等級標準表》,對樞紐區(qū)左岸兩條沖溝自然狀況下各影響因素打分進行綜合評價,如圖8所示,溝1、溝2得分均為56分,泥石流發(fā)育程度均為弱發(fā)育,發(fā)生泥石流可能性小,但在大暴雨等極端天氣條件下具備發(fā)生山洪-稀性泥石流(水石流)的條件。

圖8 左岸沖溝全景圖
4 結(jié)束語
文中運用無人機傾斜攝影技術(shù),機載LiDAR對水電站地質(zhì)災(zāi)害進行評估。對采用傾斜攝影技術(shù)以及機載LiDAR技術(shù)應(yīng)用于地質(zhì)災(zāi)害進行了探索和研究,并對其三維模型的準確性進行了檢驗。實驗結(jié)果表明,機載非接觸的無人機傾斜攝影技術(shù)在地質(zhì)災(zāi)害評估與識別中的應(yīng)用,具有效率高、安全方便等優(yōu)勢,能夠快速獲取災(zāi)害點高分辨率三維模型數(shù)據(jù)以及高精度地形數(shù)據(jù)。機載激光雷達技術(shù)能夠透過植被,獲取植被覆蓋下的地形數(shù)據(jù),很好地克服了傳統(tǒng)監(jiān)測不全面的問題。同時,高精度的實景三維模型可以直觀呈現(xiàn)地質(zhì)災(zāi)害特征信息,可清晰識別、分析和量測災(zāi)害信息。因此,將無人機攝影測量技術(shù)、機載激光雷達技術(shù),地質(zhì)災(zāi)害常規(guī)調(diào)查技術(shù)相結(jié)合,實現(xiàn)多種技術(shù)手段優(yōu)勢互補,大大減少人工野外實地調(diào)查工作量,實現(xiàn)地質(zhì)調(diào)查手段從實地調(diào)查到空地一體化,調(diào)查成果實現(xiàn)從二維到三維。豐富的調(diào)查成果數(shù)據(jù)為災(zāi)害評估以及災(zāi)害救援提供更有利的數(shù)據(jù)支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
