基于深度學(xué)習(xí)的蝸輪副熱變形預(yù)測(cè)研究
2022-11-04 02:22:52黃浩
科技與創(chuàng)新 2022年21期
黃浩
(重慶理工大學(xué),重慶 400054)
蝸桿傳動(dòng)結(jié)構(gòu)緊湊、傳動(dòng)比大、傳動(dòng)平穩(wěn)、嚙合沖擊小、噪聲小,并且當(dāng)蝸桿的導(dǎo)程角小于嚙合輪齒間的當(dāng)量摩擦角時(shí),又具有自鎖性,這些特點(diǎn)使蝸輪蝸桿傳動(dòng)在工程中應(yīng)用廣泛。根據(jù)研究表明,熱誤差占了精密機(jī)床總誤差的40%~70%,而蝸輪副的傳動(dòng)精度是影響機(jī)床加工精度的重要因素,所以研究蝸輪副熱變形預(yù)測(cè)具有重要的學(xué)術(shù)意義[1]。
深度學(xué)習(xí)憑借強(qiáng)大的數(shù)據(jù)建模和處理能力,受到國(guó)內(nèi)外眾多學(xué)者的好評(píng),并逐漸將深度學(xué)習(xí)理論引入裝備預(yù)測(cè)中。為了預(yù)測(cè)不同環(huán)境溫度下的蝸輪副齒高的變形量,本文提出了基于深度學(xué)習(xí)和有限元仿真的熱變形量預(yù)測(cè)方法。
首先采用深度學(xué)習(xí)的方式建立環(huán)境溫度與蝸輪副齒高變形量的關(guān)系模型,接著通過有限元軟件對(duì)蝸輪副進(jìn)行熱-結(jié)構(gòu)分析,得出環(huán)境溫度與蝸輪副齒高的變形量,并對(duì)溫度與變形量進(jìn)行擬合,比較預(yù)測(cè)值與仿真值的關(guān)系,得出基于深度學(xué)習(xí)模型預(yù)測(cè)蝸輪副熱變形的準(zhǔn)確性。
1 深度學(xué)習(xí)預(yù)測(cè)結(jié)構(gòu)模型
1.1 深度學(xué)習(xí)簡(jiǎn)介
深度學(xué)習(xí)的原理基本上是來自于人工神經(jīng)網(wǎng)絡(luò),它把其中的一些低級(jí)特征類別組合起來,可以形成更為高級(jí)且復(fù)雜的屬性特征,為了找出數(shù)據(jù)中的分布式特征進(jìn)行表示。深度學(xué)習(xí)也算是屬于機(jī)器學(xué)習(xí)方面的,主要就是適用于學(xué)習(xí)數(shù)據(jù)的特征分類表示。
學(xué)習(xí)模式可以分為有監(jiān)督的、半監(jiān)督的及無監(jiān)督的。深度學(xué)習(xí)中神經(jīng)網(wǎng)絡(luò)模型的結(jié)構(gòu)類型可以是單層結(jié)構(gòu),同樣也可以是多層結(jié)構(gòu),它可以分為輸入層、數(shù)據(jù)隱藏層和輸出層[2]。一個(gè)普通的神經(jīng)網(wǎng)絡(luò)模型如圖1 所示。

圖1 神經(jīng)網(wǎng)絡(luò)模型
深度學(xué)習(xí)是用數(shù)學(xué)知識(shí)和計(jì)算機(jī)算法建立起來的整體架構(gòu),再通過大量訓(xùn)練數(shù)據(jù)與計(jì)算機(jī)強(qiáng)大的運(yùn)算能力相結(jié)合去調(diào)節(jié)內(nèi)部的參數(shù),盡可能地接近問題目標(biāo)的半理論、半經(jīng)驗(yàn)的建模方式。深度學(xué)習(xí)的神經(jīng)網(wǎng)絡(luò)層數(shù)很多,寬度也非常廣,理論上可以映射到任意函數(shù),所以能解決很復(fù)雜的問題。它高度依賴數(shù)據(jù),數(shù)據(jù)量越大,它的表現(xiàn)就越好。在圖像識(shí)別、面部識(shí)別、NLP 等部分任務(wù)甚至已經(jīng)超過了人類的表現(xiàn),同時(shí)還可以通過調(diào)參進(jìn)一步提高上限[3]。
深度學(xué)習(xí)和傳統(tǒng)機(jī)器學(xué)習(xí)在數(shù)據(jù)預(yù)處理方面有一些相似之處,最核心區(qū)別主要是在于特征識(shí)別提取環(huán)節(jié)。在深度學(xué)習(xí)的處理過程中,機(jī)器可以通過自行完成特征信息提取,完成的過程無需人工提取。它是學(xué)習(xí)樣本數(shù)據(jù)的內(nèi)在規(guī)律和表征層次。在學(xué)習(xí)過程中獲得的信息對(duì)文本、圖像、聲音等數(shù)據(jù)的解讀有很大程度的幫助。它的最終目標(biāo)是讓深度學(xué)習(xí)的機(jī)器能夠像人類一樣進(jìn)行分析和學(xué)習(xí),從而識(shí)別文本、圖像和聲音等數(shù)據(jù)。隨著深度學(xué)習(xí)機(jī)器的快速進(jìn)步和發(fā)展,最新的深度機(jī)器學(xué)習(xí)算法在數(shù)據(jù)質(zhì)量預(yù)測(cè)和分類精度方面已經(jīng)遠(yuǎn)遠(yuǎn)甚至超過了傳統(tǒng)的機(jī)器學(xué)習(xí)算法。
1.2 預(yù)測(cè)模型架構(gòu)
預(yù)測(cè)模型總體框架如圖2 所示。首先通過有限元仿真得到蝸輪副在不同環(huán)境溫度下的熱變形數(shù)據(jù),然后將這些數(shù)值進(jìn)行數(shù)據(jù)預(yù)處理,并對(duì)數(shù)據(jù)進(jìn)行歸一化處理。將這些數(shù)據(jù)劃分成2 部分,一部分用于訓(xùn)練模型的樣本訓(xùn)練,另一部分用于評(píng)價(jià)模型效果的樣本測(cè)試。初始化模型參數(shù)包括神經(jīng)網(wǎng)絡(luò)隱含層數(shù)、輸入層大小、輸出層數(shù)量等[4]。利用訓(xùn)練樣本訓(xùn)練模型,并保存訓(xùn)練參數(shù)。最后利用測(cè)試樣本數(shù)據(jù)測(cè)試經(jīng)訓(xùn)練的模型預(yù)測(cè)效果并輸出結(jié)果。
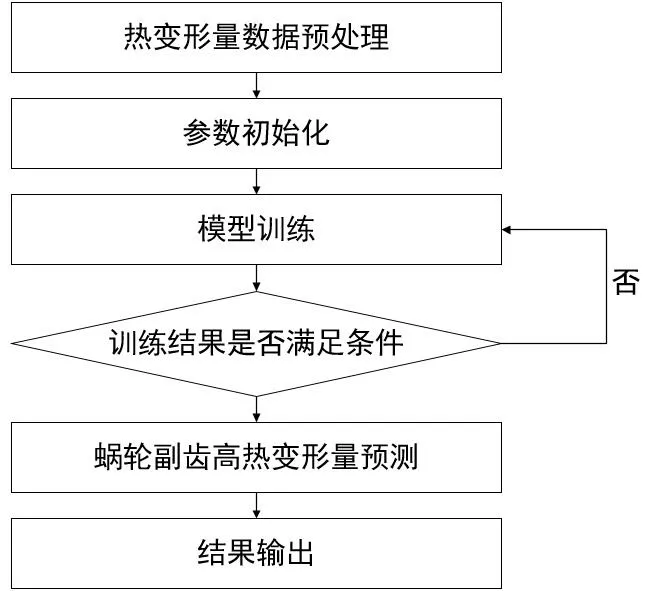
圖2 模型流程圖
2 蝸輪副有限元仿真
2.1 ANSYS 軟件簡(jiǎn)介
ANSYS 軟件由美國(guó)專家于1970 年創(chuàng)立,是當(dāng)今最受歡迎的CAE 軟件之一。當(dāng)時(shí),它僅限于熱分析和線性結(jié)構(gòu)分析,但隨著功能需求的不斷發(fā)展和計(jì)算機(jī)科學(xué)的進(jìn)步,ANSYS 已經(jīng)是一個(gè)多功能、通用的有限元方法軟件,具有許多功能模塊。它用于處理聲學(xué)、熱學(xué)、結(jié)構(gòu)靜力學(xué)等,并且被廣泛應(yīng)用于許多領(lǐng)域[5]。蝸輪蝸桿有限元分析主要涉及到熱-結(jié)構(gòu)分析。
2.2 蝸輪蝸桿有限元仿真
首先確定蝸輪蝸桿所選擇的材料和材料的屬性,如表1 所示。
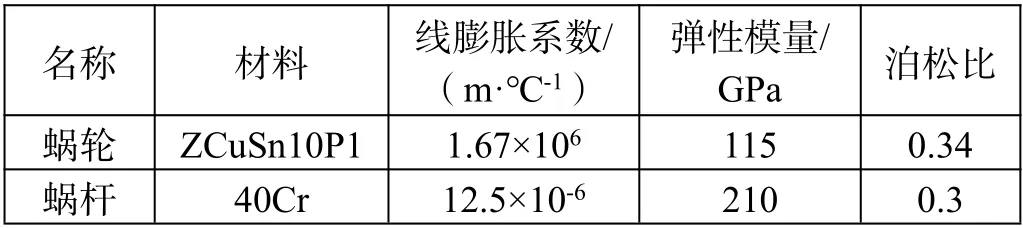
表1 材料的屬性
將Solidworks 建立的蝸輪蝸桿三維模型導(dǎo)入到ANSYS 中,如圖3 所示。在做ANSYS 仿真時(shí),蝸輪會(huì)在其嚙合點(diǎn)自動(dòng)生成接觸對(duì),并可根據(jù)需要嚙合。進(jìn)行網(wǎng)格劃分時(shí),網(wǎng)格尺寸是2 mm,這樣確保了網(wǎng)格劃分的精密性。蝸輪蝸桿網(wǎng)格劃分后的模型如圖4 所示。

圖3 蝸輪蝸桿有限元模型

圖4 網(wǎng)格劃分后的模型
因?yàn)楸疚闹豢紤]環(huán)境溫度,所以選擇的是第一類邊界條件。設(shè)置的約束方式為:在蝸輪的內(nèi)圈施加“frictionless support”(無摩擦約束),在蝸桿兩端的軸承配合處施加“cylindrical support”(圓柱約束),設(shè)定環(huán)境溫度為35 ℃。在求解完成后,對(duì)蝸輪副熱變形的情況進(jìn)行查看,如圖5 所示。

圖5 蝸輪副熱變形圖
由圖5 可以看出,蝸輪的變形是從內(nèi)圈到外圈逐漸增大,并且在蝸輪的最外圈得到最大值。在后處理模塊點(diǎn)擊位移查看命令就能準(zhǔn)確知道蝸輪副在蝸輪嚙合處徑向的變化情況,即蝸輪齒高的變形量。
3 仿真結(jié)果分析
從工作經(jīng)驗(yàn)出發(fā),在制造蝸輪蝸桿時(shí)的車間溫度一般是恒溫20 ℃,而使用蝸輪蝸桿的環(huán)境溫度通常不超過40 ℃。因此設(shè)定溫度從21 ℃開始,溫度每上升1 ℃進(jìn)行仿真,然后通過深度學(xué)習(xí)對(duì)蝸輪副齒高熱變形進(jìn)行預(yù)測(cè)。蝸輪副齒高熱變形量的有限元仿真值與真實(shí)值對(duì)比關(guān)系如圖6 所示。

圖6 齒高熱變形量仿真值與預(yù)測(cè)值對(duì)比
仿真結(jié)果表明,隨著環(huán)境溫度的增加蝸輪齒高的熱變形誤差量也在不斷增加。從圖6 對(duì)比的結(jié)果可以看出,2 條曲線重合的部分比較少,但利用深度學(xué)習(xí)可以較為準(zhǔn)確地預(yù)測(cè)蝸輪副齒高熱變形量的變化趨勢(shì),但是預(yù)測(cè)的細(xì)節(jié)還有待加強(qiáng),從結(jié)果來看,模型能夠較為準(zhǔn)確地預(yù)測(cè)流量的變化情況。
4 結(jié)論
通過深度學(xué)習(xí)預(yù)測(cè)溫度與蝸輪熱變形的關(guān)系,然后利用有限元軟件對(duì)蝸輪熱變形進(jìn)行求解分析,得到由一定的溫度變化所造成的蝸輪齒高變形誤差值。筆者結(jié)合深度學(xué)習(xí)與有限元軟件,合理地對(duì)蝸輪副齒高熱變形進(jìn)行了預(yù)測(cè),對(duì)提高蝸輪蝸桿傳動(dòng)精度具有重要意義。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年11期)2020-12-14 06:59:52
中華詩(shī)詞(2020年1期)2020-09-21 09:24:52
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年8期)2019-01-14 01:14:28
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年10期)2019-01-08 02:44:26
藝術(shù)品鑒證.中國(guó)藝術(shù)金融(2018年12期)2018-08-26 06:03:48
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24