具有輸入時滯的集群無人機(jī)事件觸發(fā)協(xié)同最優(yōu)控制
2022-11-02 09:37:30陳謀,吳穎
南京航空航天大學(xué)學(xué)報(bào) 2022年5期
陳 謀,吳 穎
(南京航空航天大學(xué)自動化學(xué)院,南京 211106)
近年來,集群無人機(jī)協(xié)同控制因其具有分布并行感知、計(jì)算和執(zhí)行能力,更好的容錯性和魯棒性得到了業(yè)內(nèi)的廣泛關(guān)注[1-3]。針對受輸出死區(qū)和執(zhí)行器故障影響的多旋翼無人機(jī),文獻(xiàn)[4]提出了一種自適應(yīng)姿態(tài)協(xié)同控制策略。文獻(xiàn)[5]提出了一種無人機(jī)系統(tǒng)分布式自適應(yīng)差分進(jìn)化目標(biāo)跟蹤控制方法。文獻(xiàn)[6]針對帶有執(zhí)行器故障和輸入飽和的集群無人機(jī)系統(tǒng),設(shè)計(jì)了一種分布式容錯協(xié)同控制策略。然而,在實(shí)際系統(tǒng)應(yīng)用中,無人機(jī)在復(fù)雜任務(wù)和不確定性影響下,要求無人機(jī)群能夠以一種最優(yōu)控制方式完成目標(biāo)探測、識別,并進(jìn)行目標(biāo)分配、任務(wù)規(guī)劃等。
由于神經(jīng)網(wǎng)絡(luò)具有良好的逼近和學(xué)習(xí)能力,自適應(yīng)動態(tài)規(guī)劃成了處理非線性系統(tǒng)最優(yōu)控制問題的重要方法之一。近年來涌現(xiàn)了大量關(guān)于神經(jīng)網(wǎng)絡(luò)強(qiáng)化學(xué)習(xí)優(yōu)化控制的研究成果[7-9]。例如,文獻(xiàn)[10]提出了一種執(zhí)行-評判-辨識神經(jīng)網(wǎng)絡(luò)框架,用于逼近哈密頓-雅可比-貝爾曼(Hamilton-Jacobi-Bellman,HJB)方程,以獲得不確定非線性系統(tǒng)的最優(yōu)控制方案。針對單輸入單輸出非線性嚴(yán)格反饋系統(tǒng),文獻(xiàn)[11]基于強(qiáng)化學(xué)習(xí)算法提出了一種反步優(yōu)化控制方法。文獻(xiàn)[12]針對車輛云系統(tǒng),提出了一種基于半馬爾可夫決策過程和強(qiáng)化學(xué)習(xí)算法的自適應(yīng)云資源分配模型。然而,集群無人機(jī)的分布式協(xié)同自適應(yīng)最優(yōu)一致性控制問題還需進(jìn)一步深入研究。
另一方面,對于集群無人機(jī)協(xié)同控制問題,如果一架無人機(jī)進(jìn)行周期采樣,并將采集的數(shù)據(jù)實(shí)時傳輸給其鄰居無人機(jī),一旦傳輸?shù)臄?shù)據(jù)量太大,在信道容量受限的情況極有可能導(dǎo)致通信阻塞,從而影響集群無人機(jī)系統(tǒng)的控制性能。因此,事件觸發(fā)策略作為減少通訊資源浪費(fèi)的有效途徑之一引起了眾多學(xué)者的關(guān)注[13-17]。文獻(xiàn)[18]提出了一種事件觸發(fā)協(xié)同無跡卡爾曼濾波控制策略,并且將該策略在集群無人機(jī)系統(tǒng)中進(jìn)行了應(yīng)用。文獻(xiàn)[19]針對無線網(wǎng)絡(luò)控制系統(tǒng),設(shè)計(jì)了一種周期事件觸發(fā)采樣和雙速率控制問題,并將其應(yīng)用于多無人機(jī)系統(tǒng)。文獻(xiàn)[20]提出了一種基于認(rèn)知無線電網(wǎng)絡(luò)的無人機(jī)事件觸發(fā)輸出反饋控制切換方法。然而,值得注意的是,事件觸發(fā)閾值的設(shè)計(jì)可能會影響集群無人機(jī)系統(tǒng)的控制性能,因此在協(xié)同控制器設(shè)計(jì)的時候需要考慮基于系統(tǒng)控制性能的事件觸發(fā)策略以減少通信資源的浪費(fèi),同時盡可能減少對系統(tǒng)控制性能的影響。
基于以上分析,本文針對受外部干擾和輸入時滯影響的集群無人機(jī)系統(tǒng),研究了動態(tài)事件觸發(fā)協(xié)同自適應(yīng)最優(yōu)神經(jīng)網(wǎng)絡(luò)控制問題。對于六旋翼集群無人機(jī)系統(tǒng),基于最優(yōu)反步控制技術(shù),本文提出了一種最小能量損耗的協(xié)同自適應(yīng)控制方案。此外,將事件觸發(fā)控制算法融入本方案以減少執(zhí)行器的機(jī)械磨損,進(jìn)而利用更少的成本獲得系統(tǒng)控制目標(biāo)。同時設(shè)計(jì)了一種考慮系統(tǒng)一致性控制性能的動態(tài)事件觸發(fā)策略,該策略包含一致性誤差,可以在盡可能降低對一致性控制性能影響的同時,減少通信資源的浪費(fèi)。此外,所設(shè)計(jì)的考慮系統(tǒng)控制性能的動態(tài)事件觸發(fā)策略可以排除Zeno 行為。
1 問題描述與預(yù)備知識
1.1 系統(tǒng)建模
本文考慮如下六旋翼無人機(jī)的位置模型[21]

時滯現(xiàn)象[22-24]普遍存在于各種系統(tǒng)中。在無人機(jī)飛控系統(tǒng)中,各種傳感器復(fù)雜的數(shù)據(jù)計(jì)算和數(shù)據(jù)測量都會導(dǎo)致時間延遲。時滯的存在可能導(dǎo)致控制信號無法及時控制系統(tǒng)狀態(tài),導(dǎo)致無人機(jī)無法達(dá)到理想的控制效果,甚至造成事故。另外,無人機(jī)在復(fù)雜環(huán)境飛行過程中不可避免地會遇到強(qiáng)非線性以及未知干擾等問題。基于上述分析,本文考慮了在系統(tǒng)不確定、輸入時滯以及外部干擾影響下的六旋翼無人機(jī)系統(tǒng),并且基于式(1),第i個六旋翼無人機(jī)的位置系統(tǒng)模型可轉(zhuǎn)化為

式 中;li,h=1m i;τh>0 是 已 知 的 常 數(shù) 時 延;pˉi,h2=[pi,h1,pi,h2]T∈R2(h=1,2,3) 表 示 狀 態(tài) 向 量;pi,11=xi,pi,21=yi,pi,31=zi,pi,12=vxi,pi,22=vyi,pi,32=vzi,vx、vy和vz表 示 線 速 度 變 量;gi,h1(pi,h1)表 示 無 人 機(jī) 系 統(tǒng) 建 模 過 程 中 忽 略 的 非 線性 部 分;gi,12(pˉi,12),gi,22(pˉi,22)和gi,32(pˉi,32)分 別 包含ψ1x˙i/m,ψ2y˙i/m和ψ3z˙i/m以及建模過程中忽略的非線性部分,并且di,h(t)表示鄰居無人機(jī)j和外界因素對無人機(jī)i產(chǎn)生的總干擾;yi,h是六旋翼無人機(jī)系統(tǒng)的輸出。另外六旋翼無人機(jī)系統(tǒng)的縱向,橫向以及高度通道的控制輸入信號分別為ui,1=(cosφisinθicosφi+sinφisinφi)Mi,ui,2=Mi(sinφisinθicosφi-cosφisinφi) 和ui,3=(cosθicosφi)Mi-mi g。根據(jù)文獻(xiàn)[21],可以反解出期望的姿態(tài)角如下

1.2 問題描述
對于系統(tǒng)控制輸入信號ui,h,從圖1 可以看出ui,h=ui,h1+ui,h2,其 中ui,h1表 示 反 饋 控 制 信 號,ui,h2表示前饋干擾補(bǔ)償控制信號。首先對于反饋控制通道,為了降低控制器更新的頻率進(jìn)而減少資源損耗,本文引入了如下考慮一致性控制性能的動態(tài)事件觸發(fā)機(jī)制

圖1 六旋翼無人機(jī)自適應(yīng)事件觸發(fā)控制方案示意圖Fig.1 Diagram of adaptive event-triggered control scheme of six-rotor UAVs

式中:ωi,h(t)=ui,h1(t)-υi,h(t)表示當(dāng)前反饋控制輸入信號υi,h(t)與采樣反饋控制輸入信號ui,h1(t)的 差 值。κi,h、ζi,h、εˇi,h、cˇi,h1和cˇi,h2為 待 設(shè) 計(jì) 的 正 參數(shù);ei,h1為系統(tǒng)的一致性誤差。此外,從式(6)可以看出,對于給定的初值βi,h(0)∈(0,1),可以得到對于任意的t≥0 有βi,h(t)∈(0,1)。另一方面,從式(5)可以看出,本文在傳統(tǒng)的事件觸發(fā)策略基礎(chǔ)上加入了關(guān)于一致性控制性能的調(diào)節(jié)項(xiàng),可以在減少資源損耗的同時盡可能減少對系統(tǒng)控制性能的影響。
本文的主要目的是針對復(fù)雜環(huán)境下六旋翼無人機(jī)飛行過程中遇到的不確定性、未知干擾、資源受限以及輸入時滯等問題,設(shè)計(jì)一種基于動態(tài)事件觸發(fā)的最優(yōu)分布式協(xié)同神經(jīng)網(wǎng)絡(luò)控制策略以實(shí)現(xiàn)如下控制目標(biāo):
(1)集群六旋翼無人機(jī)系統(tǒng)中所有信號都是半全局一致最終有界;
(2)每個六旋翼無人機(jī)能夠?qū)崿F(xiàn)一致性控制;
(3)對于考慮系統(tǒng)控制性能的動態(tài)事件觸發(fā)策略,可以證明不存在Zeno 行為。
為了達(dá)到預(yù)期的控制目標(biāo),需要滿足如下假設(shè)條件:
假設(shè)1[21]從根節(jié)點(diǎn)到其他所有節(jié)點(diǎn)至少有一條有向路徑,有向圖包含以節(jié)點(diǎn)0 為根的生成樹。
假設(shè)2[25]長機(jī)的動態(tài)yd,h及其一階、二階導(dǎo)數(shù)動態(tài)均有界。
假 設(shè)3[25]假 設(shè) 外 部 干 擾di,h(t)及 其 一 階 導(dǎo)數(shù)是有界的。
2 自適應(yīng)動態(tài)事件觸發(fā)協(xié)同最優(yōu)控制器設(shè)計(jì)和穩(wěn)定性分析
2.1 自適應(yīng)動態(tài)事件觸發(fā)協(xié)同最優(yōu)控制器設(shè)計(jì)
對于受外部干擾和輸入時滯影響的六旋翼無人機(jī)系統(tǒng),本節(jié)將基于強(qiáng)化學(xué)習(xí)和反步控制技術(shù),設(shè)計(jì)一種分布式自適應(yīng)動態(tài)事件觸發(fā)協(xié)同優(yōu)化控制器來確保閉環(huán)系統(tǒng)的穩(wěn)定性。此外,為了解決輸入時滯問題,在傳統(tǒng)坐標(biāo)變換的基礎(chǔ)上加入了積分項(xiàng)來補(bǔ)償其對系統(tǒng)性能的影響。為了實(shí)現(xiàn)控制目標(biāo),定義如下一致性誤差和坐標(biāo)變換

式 中:ei,h1和ei,h2為 誤 差;α^*i,h1為 待 設(shè) 計(jì) 的 中 間 控 制信號;ai,j表示各個跟隨無人機(jī)之間進(jìn)行信息交互關(guān)系的權(quán)值,如果權(quán)值ai,j>0 表示無人機(jī)i可以接收到無人機(jī)j的信息,否則,ai,j=0;ai,0表示跟隨無人機(jī)與長機(jī)之間信息交互關(guān)系的權(quán)值,如果權(quán)值ai,0>0 表 示 無 人 機(jī)i可 以 接 收 到 長 機(jī) 的 信 息,否則,ai,0=0。


受文獻(xiàn)[11]中所介紹的優(yōu)化控制算法啟發(fā),評判神經(jīng)網(wǎng)絡(luò)的權(quán)值更新律可以設(shè)計(jì)為



式 中ci,h12>0,μi,hc2>0,μi,ha2>1 2,μi,hg2>0 和θˇi,h2>0 是 待 設(shè) 計(jì) 參 數(shù),并 且μi,hc2和μi,ha2的 關(guān) 系 滿足μi,hc2>μi,hc2>μi,ha22。
為了補(bǔ)償外部干擾對六旋翼無人機(jī)帶來的影響,設(shè)計(jì)以下干擾觀測器[25]

式中:D^i,h為Di,h=di,h+( 1oi,h)σi,h2(pˉi,h2)的估計(jì);δ^i,h2為 權(quán) 值δi,h2的 估 計(jì)。考 慮 式(41,42),整 理可得

2.2 穩(wěn)定性分析
集群六旋翼無人機(jī)系統(tǒng)的事件觸發(fā)協(xié)同最優(yōu)控制閉環(huán)系統(tǒng)穩(wěn)定性結(jié)論可歸納為如下定理。
定理1 基于給出的假設(shè)和設(shè)計(jì)的動態(tài)事件觸發(fā)機(jī)制式(4~6),對于受輸入時滯和外部干擾影響的六旋翼集群無人機(jī)系統(tǒng),按式(37~45)設(shè)計(jì)每個六旋翼無人機(jī)的最優(yōu)控制信號、權(quán)值更新律和干擾觀測器,則可以得到以下性質(zhì):
(1)集群六旋翼無人機(jī)系統(tǒng)中所有信號都是半全局一致最終有界;
(2)每個六旋翼無人機(jī)系統(tǒng)的輸出能夠?qū)崿F(xiàn)一致;
(3)對于所設(shè)計(jì)的動態(tài)事件觸發(fā)機(jī)制,閉環(huán)系統(tǒng)不存在Zeno 行為。
證明
步驟1 根據(jù)積分中值定理[26],可以得到






3 驗(yàn)證結(jié)果
基于圖2 中給出的通信拓?fù)鋱D,給出仿真結(jié)果來驗(yàn)證所提出控制方案的有效性。

圖2 通信拓?fù)鋱DFig.2 Communication topology
長機(jī)的軌跡定義如下

六旋翼無人機(jī)系統(tǒng)未建模的部分定義為gi,h1(pi,h1)=0.5sin(pi,h1),gi,h2(pˉi,h2)=-sin(pi,h1)+0.2pi,h2,機(jī)身質(zhì)量m=2 kg,空氣阻力系數(shù)ψh=2,并且外部干擾選定為di,h=0.5sint。接下來定義如下 參 數(shù):ω~1,h1=ω~3,h1=ω~1,h2=ω~3,h2=38,ω~2,h1=ω~4,h1=ω~2,h2=ω~4,h2=156;μi,hg1=15,μi,hg2=1,μi,hc1=0.6,μi,hc2=0.4,μi,ha1=0.8,μi,ha2=0.6;τh=0.514;cˇi,h=2;κi,1=κi,2=1,κi,3=2;ζ1,1=ζ3,1=ζi,2=ζ1,3=ζ3,3=0.8,ζ2,1=ζ4,1=ζ2,3=ζ4,3=1;εˇi,h=0.2。
變量的初值選擇為pi,1(0)=[0,-1,1]Tm,pi,2(0)=[0,-1,1]Tm/s,δ^i,hc1(0)=δ^i,hc2(0)=[0.4,0.4,0.4,0.4,0.4,0.4]T,δ^i,ha1(0)=δ^i,ha2(0)=[1.2,1.2,1.2,1.2,1.2,1.2]T, 并 且δ^i,hg1(0)=δ^i,hg2(0)=[0,0,0,0,0,0]T。圖3~8 為 仿 真 驗(yàn) 證結(jié)果。圖3 為六旋翼無人機(jī)的3 維跟蹤軌跡圖,可以看到一致性控制性能得以實(shí)現(xiàn)。圖4 為跟隨者無人機(jī)和長機(jī)的輸出圖。圖5 是每架六旋翼無人機(jī)的總推力軌跡。圖6,7 是自適應(yīng)更新律的軌跡。圖8 為觸發(fā)時刻圖。從圖8 中可以看出,六旋翼無人機(jī)系統(tǒng)中所有信號都是半全局一致最終有界的,六旋翼無人機(jī)系統(tǒng)的輸出能夠?qū)崿F(xiàn)一致,并且通訊資源得以節(jié)省。
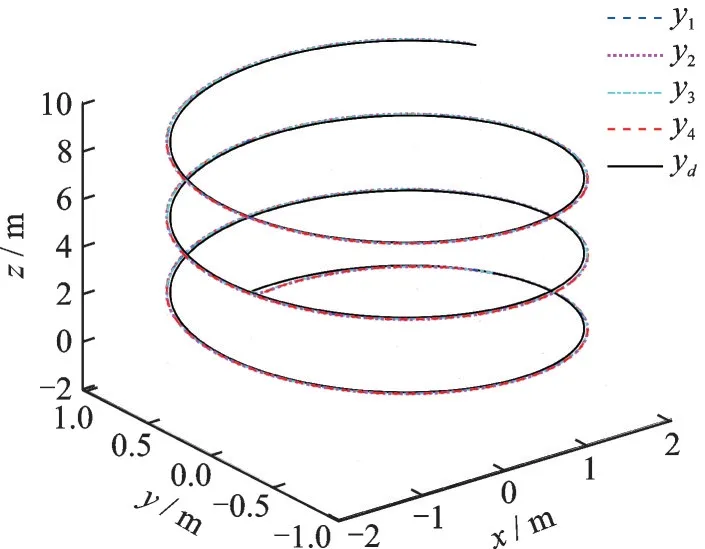
圖3 六旋翼無人機(jī)的3 維跟蹤軌跡圖Fig.3 Three dimensional tracking trajectories of six-rotor UAVs

圖4 跟隨機(jī)yi,h 和長機(jī)yd,h 的軌跡圖Fig.4 Trajectories of followers yi,h and leaders yd,h

圖5 六旋翼無人機(jī)的總推力軌跡Fig.5 Trajectories of total thrust for six-rotor UAVs

圖6 ‖ δ^i,ha1(t) ‖的軌跡Fig.6 Trajectories of‖ δ^i,ha1(t)‖

圖7 ‖ δ^i,hc1(t) ‖的軌跡Fig.7 Trajectories of‖ δ^i,hc1(t)‖

圖8 六旋翼無人機(jī)的觸發(fā)時刻圖Fig.8 Triggering instants of six-rotor UAVs
4 結(jié) 論
針對受輸入時滯和外部干擾影響的六旋翼無人機(jī),提出了一種基于強(qiáng)化學(xué)習(xí)算法的分布式自適應(yīng)動態(tài)事件觸發(fā)最優(yōu)控制策略。首先設(shè)計(jì)了一種改進(jìn)的事件觸發(fā)策略來減少通信資源浪費(fèi),同時盡可能降低對系統(tǒng)控制性能的影響,并且該策略可以排除Zeno 行為。本文所提出的基于干擾觀測器的最優(yōu)分布式協(xié)同控制策略保證了六旋翼無人機(jī)系統(tǒng)的所有信號都有半全局一致最終有界,并且一致性誤差能夠收斂到原點(diǎn)的小鄰域內(nèi)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
公民與法治(2022年5期)2022-07-29 00:47:28
教學(xué)考試(高考物理)(2021年5期)2021-11-08 10:31:22
中醫(yī)眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16