高超聲速飛行器地面顫振評估技術(shù)研究
2022-11-02 09:37:08王彬文宋巧治陳浩宇
南京航空航天大學學報 2022年5期
關(guān)鍵詞:模態(tài)結(jié)構(gòu)
王彬文,宋巧治,陳浩宇
(中國飛機強度研究所航空聲學與振動航空科技重點實驗室,西安 710065)
高超聲速飛行器飛行馬赫數(shù)高,其結(jié)構(gòu)在流場中會產(chǎn)生強烈的激波并和附面層作用,從而引起顯著的氣動加熱效應。氣動加熱一方面降低了材料的力學性能,另一方面不均勻的氣動熱場會使結(jié)構(gòu)產(chǎn)生不均勻的應力分布,顯著改變結(jié)構(gòu)的動力學特性,進而使結(jié)構(gòu)的顫振特性發(fā)生改變。因此,在高超聲速飛行器研制中必須關(guān)注結(jié)構(gòu)在所有典型工況下的顫振特性,從而保證其在全飛行包線內(nèi)的安全性。
對于高超聲速飛行器存在的熱顫振問題,由于難以準確在地面模擬飛行器結(jié)構(gòu)實際承受的高超聲速流場及氣動熱環(huán)境,目前工程研制中尚未建立完善的地面試驗驗證手段,結(jié)構(gòu)的熱顫振特性難以充分驗證,這使得后續(xù)的飛行試驗風險大幅提高,顯著增加了高超聲速飛行器的研制成本。
針對高超聲速飛行器熱顫振試驗驗證手段匱乏的現(xiàn)狀,研究人員近年來正逐步嘗試將地面顫振試驗技術(shù)引入熱顫振研究領(lǐng)域。地面顫振試驗是一項利用激振器模擬結(jié)構(gòu)實際飛行中承受的非定常氣動力,從而在地面實現(xiàn)顫振現(xiàn)象模擬的試驗技術(shù)。該技術(shù)最早由美國John Hopkins 大學應用物理 實 驗 室 的Kearns[1]在1962 年 提 出,但 是 由 于 缺乏先進的數(shù)字計算技術(shù),該項試驗技術(shù)在當時尚不具備工程價值。到21 世紀初,隨著非定常氣動力數(shù)字計算技術(shù)的進步及控制理論的發(fā)展,俄羅斯的Smyslov 等[2-3]及美國的Zeng 等[4]先后提出了較為完整的地面顫振試驗技術(shù)工程應用方案并進行了試驗驗證。近年國內(nèi)也對地面顫振試驗技術(shù)進行了技術(shù)攻關(guān),對其中的非定常氣動力重構(gòu)[5-7]、氣動力模擬加載控制[8-9]等關(guān)鍵技術(shù)開展了諸多研究,進一步提升了地面顫振試驗的技術(shù)成熟度。
熱顫振驗證是地面顫振試驗技術(shù)具有較高研究價值的一個應用場景,該試驗理念最早由潘樹祥等[10]在1984 年提出并進行了初步的技術(shù)探索,但受限于當時的試驗能力并未進一步研究。筆者團隊[11-12]近年來開展了諸多考慮氣動熱環(huán)境的地面顫振試驗相關(guān)技術(shù)研究,并在文獻[13]中實現(xiàn)了針對受熱翼面結(jié)構(gòu)的時變顫振邊界預測與驗證,但是該試驗方案中仍存在著氣動力加載控制頻帶窄、試驗溫度較低等不足,為此本文將對相關(guān)試驗技術(shù)開展進一步的優(yōu)化與研究,提升地面顫振試驗技術(shù)的應用范圍與測試結(jié)果精度。
1 熱環(huán)境地面顫振試驗原理
地面顫振試驗是一種半實物仿真試驗技術(shù),而受熱結(jié)構(gòu)的顫振邊界預估與驗證則可以視為常規(guī)地面顫振試驗技術(shù)的拓展與延伸。該項技術(shù)在采用離散激振設(shè)備模擬結(jié)構(gòu)的非定常氣動力的同時,利用石英燈輻射加熱系統(tǒng)模擬結(jié)構(gòu)在高超聲速流場中承受的氣動熱環(huán)境,從而在地面實現(xiàn)真實飛行器結(jié)構(gòu)的顫振(流-固-熱耦合)現(xiàn)象模擬測試,為高超聲速飛行器熱顫振邊界驗證提供一種可行的試驗手段。
在試驗過程中,采用閉環(huán)溫控的方式使石英燈輻射加熱系統(tǒng)根據(jù)預設(shè)的溫度變化曲線實現(xiàn)熱環(huán)境加載,模擬結(jié)構(gòu)在飛行軌跡中經(jīng)歷溫升效應;采用多種振動傳感器對結(jié)構(gòu)的振動響應信號進行測試,基于重構(gòu)的非定常氣動力模型利用測試振動信號進行結(jié)構(gòu)非定常氣動力計算;通過多個離散點的激振器對氣動力進行模擬激勵,并利用控制器確保激勵的精度,最終通過對試驗結(jié)構(gòu)施加初始擾動并觀察其響應,實現(xiàn)對真實飛行器結(jié)構(gòu)的熱顫振邊界測試,試驗系統(tǒng)如圖1 所示。
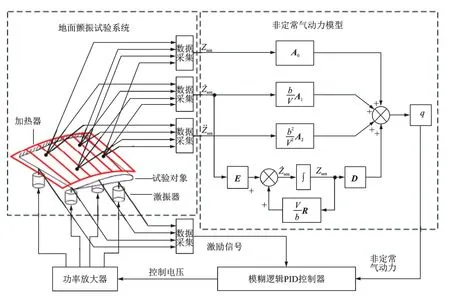
圖1 熱環(huán)境地面顫振試驗系統(tǒng)Fig.1 Ground flutter test system with high temputure
2 結(jié)構(gòu)熱顫振特性分析
2.1 研究對象
本文采用了一個鈦合金三角形翼面作為研究對象,其根弦長1 800 mm,梢弦長150 mm,半展長1 200 mm,前緣線與根弦的夾角為31°,厚度9 mm,試驗件根部通過螺栓與鋼梁底座連接模擬固支邊界,具體形狀如圖2 所示。試驗件材料為TA15 鈦 合 金,其 密 度 為4 450 kg/m3,泊 松 比為0.39。
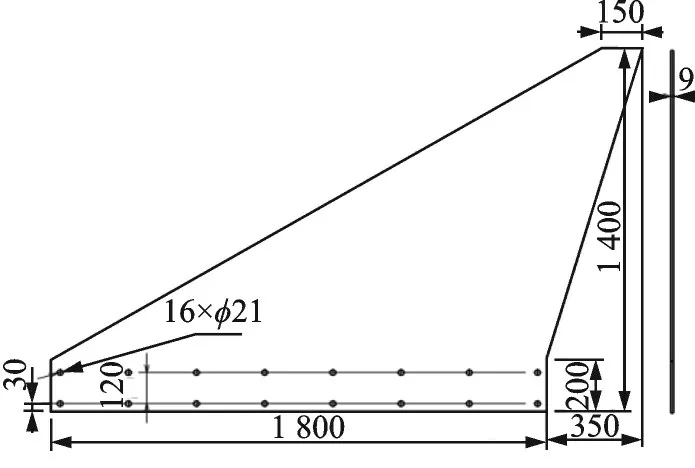
圖2 翼面幾何尺寸Fig.2 Geometrical size of wing
2.2 氣動熱環(huán)境
本文通過工程方法計算結(jié)構(gòu)承受的氣動加熱熱流密度,再通過結(jié)構(gòu)傳熱計算獲得結(jié)構(gòu)的溫度場,由于本次研究采用的三角形翼面結(jié)構(gòu)構(gòu)型簡單,因此采用工程算法可以兼顧計算精度和效率。
依據(jù)牛頓冷卻定律,在超聲速流場中邊界層傳遞至結(jié)構(gòu)的熱流密度可表示為

式中:qa為氣動加熱熱流密度;α為對流換熱系數(shù);Te為邊界層外緣的流體溫度;Tw為繞流物體壁面溫度;ε為熱輻射系數(shù);σ為波爾茲曼常數(shù)。
對于飛行器的非駐點部位,對流換熱系數(shù)α可分為層流和湍流兩種流動情況進行計算,對于本文中的翼面結(jié)構(gòu)可用層流條件計算

式中Ve為邊界層外緣的流體運動速度。在采用參考溫度法時,密度ρ*、定壓比熱C*p、雷諾數(shù)Re*、普朗特數(shù)Pr*均為特定參考溫度T*下的值,其中密度ρ*由邊界層外緣密度ρe根據(jù)流體動力學關(guān)系計算得到,定壓比熱C*p可查表獲取,雷諾數(shù)Re*和普朗特數(shù)Pr*計算公式為
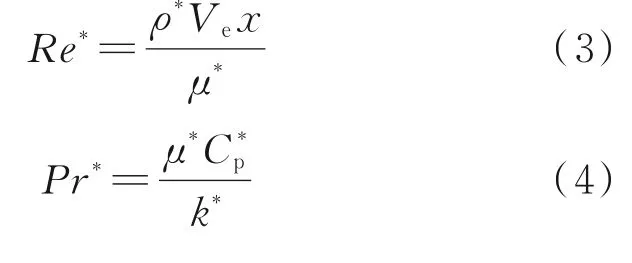
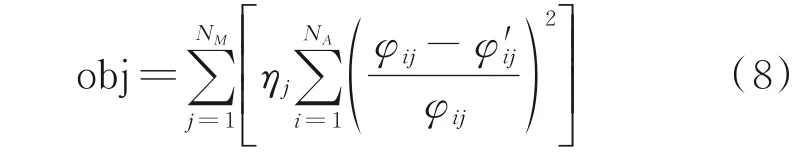
式中粘性系數(shù)μ*可依據(jù)薩特蘭公式計算
式中γ為比熱比,對于量熱完全氣體γ=1.4,r為恢復因子。
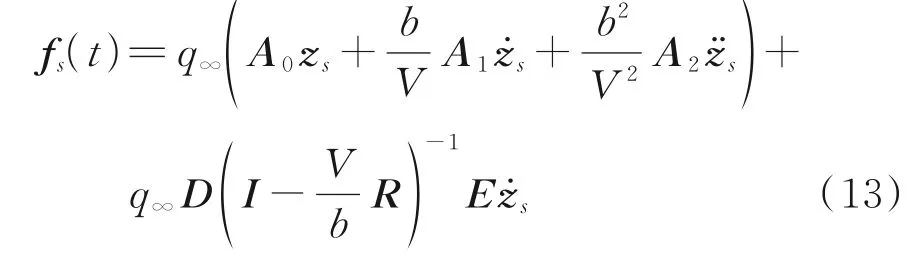
設(shè)定飛行環(huán)境為海拔高度20 km,飛行馬赫數(shù)由Ma3.6 升至Ma5,選取Ma3.6、Ma4、Ma4.5、Ma5 共4 個工況點,采用上述氣動加熱工程近似方法及結(jié)構(gòu)傳熱有限元法進行求解,可得在加速過程中結(jié)構(gòu)前緣最高溫由450 ℃升至730 ℃,最終Ma5 狀態(tài)下結(jié)構(gòu)溫度分布如圖3 所示。
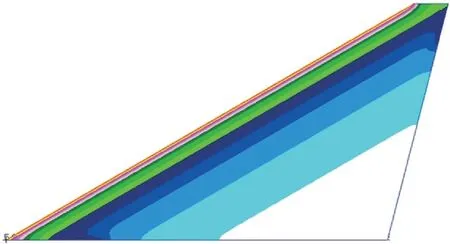
圖3 Ma 5 下結(jié)構(gòu)溫度場Fig.3 Structure temperature field at Ma 5
2.3 動力學特性分析
以2.2 節(jié)所得時變溫度場作為邊界條件開展結(jié)構(gòu)動力學分析。采用時間凍結(jié)假設(shè),在選取的4個工況點溫度場下,分別開展熱模態(tài)及熱顫振分析。
熱模態(tài)分析從材料彈性模量以及不均勻熱應力兩方面考慮溫度對結(jié)構(gòu)模態(tài)特性的影響,計算結(jié)果顯示,隨著結(jié)構(gòu)前緣最高溫由450 ℃升至730 ℃,結(jié)構(gòu)第一階模態(tài)頻率由5.76 Hz 降至3.76Hz,第2階模態(tài)頻率由15.59 Hz 降至10.04 Hz,在最高溫440 ℃及730 ℃下結(jié)構(gòu)的前兩階模態(tài)頻率如圖4所示。
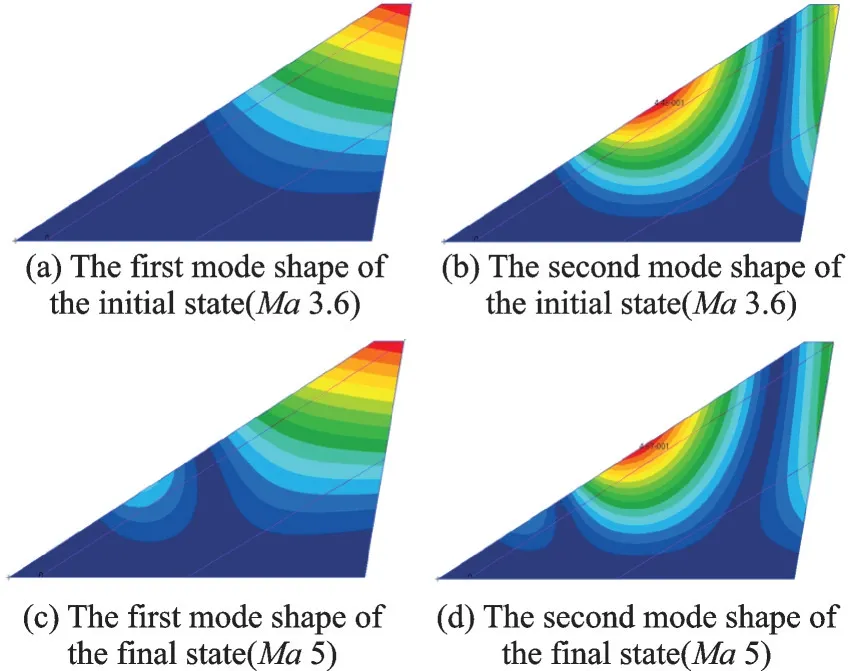
圖4 結(jié)構(gòu)前兩階熱模態(tài)振型Fig.4 Two lower mode shapes of structure
根據(jù)上述不同工況點下的熱模態(tài)數(shù)據(jù)開展顫振分析,獲得4 個工況點的第2 階模態(tài)分支v-g曲線如圖5 所示。結(jié)果顯示,在翼面結(jié)構(gòu)溫度場由初始狀態(tài)變化至最終狀態(tài)的過程中,其顫振臨界速度由1 362 m/s 降至886 m/s,顫振頻率由12.5 Hz 降至7.6 Hz。

圖5 第2 階模態(tài)v-g 曲線Fig.5 The second modal’s v-g plot
3 考慮多工況的氣動力綜合優(yōu)化重構(gòu)
3.1 氣動力模型優(yōu)化降階
如第1 節(jié)所述,地面顫振試驗采用離散激振力來模擬結(jié)構(gòu)在飛行中實際承受的分布式非定常氣動力,該方法的可行性已在文獻[5]中進行了驗證。確保離散激振力與連續(xù)非定常氣動力等效是保證顫振邊界結(jié)果精度的前提,而在試驗設(shè)計中該工作可進一步轉(zhuǎn)化為最優(yōu)的試驗激勵/拾振點位置選取問題。
針對上述問題,目前相關(guān)研究通常采用基于廣義力等效的遺傳優(yōu)化算法進行求解。廣義力等效優(yōu)化的基本思想是在某一插值點布置方案下,通過該插值點進行離散激振力加載時的廣義力與顫振實際發(fā)生時結(jié)構(gòu)承受的廣義氣動力誤差最小,則該方案即為最優(yōu)方案。文獻[5]經(jīng)過推導得,該優(yōu)化目標等效于通過該組插值點表示的氣動網(wǎng)格插值振型與原始模態(tài)振型之間的誤差最小,即
式中:ηj為j階模態(tài)對顫振的貢獻量;NM為主要模態(tài)數(shù)量;NA為氣動網(wǎng)格節(jié)點數(shù)量;φij與φ′ij分別為縮減前后的氣動力插值振型。obj 越小,說明縮減前后插值振型越接近,氣動力模擬精度越高。
如式(8)所示,基于廣義力等效的優(yōu)化降階方法需要采用結(jié)構(gòu)模態(tài)振型作為氣動力插值目標振型,而在熱顫振系統(tǒng)中受氣動熱影響的結(jié)構(gòu)熱模態(tài)振型具有時變特性,這會導致在整個飛行包線的不同時刻采用式(8)所示方法所得的最優(yōu)插值點位置有所不同,而在試驗過程中激勵/拾振點位置不能改變,因此采用如下方案,在飛行包線上進行典型工況點采樣,并在式(8)中引入采樣工況點的熱模態(tài)參數(shù)進行綜合優(yōu)化,構(gòu)建優(yōu)化目標函數(shù)如下
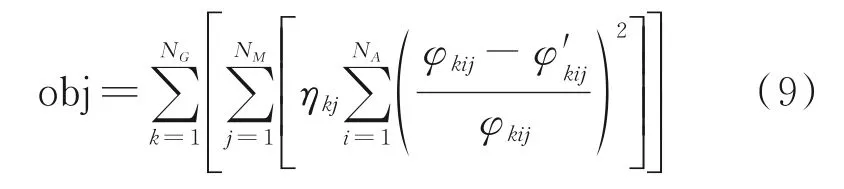
式中NG為選取的典型工況數(shù)量。
顯然,通過式(9)所得的插值點布置方案雖然不是每一個采樣工況處的最優(yōu)方案,但是考慮整個時變歷程中所有的采樣工況點后該布置方案加權(quán)最優(yōu),在試驗全過程中采用該布置方案所得試驗結(jié)果均能保持較高可信度。
采用上述方法對第3 節(jié)所述翼面試驗對象開展綜合降階優(yōu)化,得到試驗激勵/拾振點(共點)布置方案如圖6 所示。
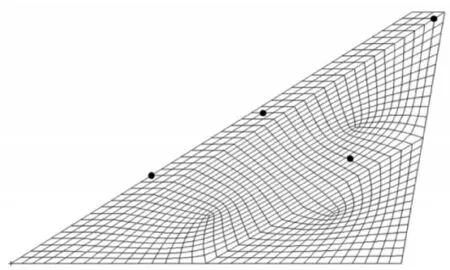
圖6 最優(yōu)試驗激勵/拾振點布置方案Fig.6 Optimal locations of the exciters and transducers
3.2 非定常氣動力模型重構(gòu)
在地面顫振試驗中,需要根據(jù)測量得到的結(jié)構(gòu)振動響應(包括位移、速度和加速度)計算氣動力,因而采用頻域內(nèi)的氣動力計算方法將飛行器及其部件受到的空氣動力表示為結(jié)構(gòu)物理變形的函數(shù),表達式為

式中:fa為頻域非定常氣動力;q∞為來流動壓;za表示結(jié)構(gòu)的振動幅值;k=ωb/V為減縮頻率,其中ω為簡諧運動的圓頻率,b為參考長度(對于翼面類結(jié)構(gòu)一般取根弦長度的一半),V為來流速度。A(k)稱為氣動力影響系數(shù)(Aerodynamic influence coefficient,AIC)矩陣。
從物理意義的角度講,氣動力影響系數(shù)矩陣表示的是氣動網(wǎng)格單元上的氣動力fa與該單元上結(jié)構(gòu)振動幅值za之間的關(guān)系,也可認為該矩陣描述了結(jié)構(gòu)至氣動力的傳遞關(guān)系,因此列向量fa、za的長度應與矩陣A(k)的維數(shù)一致。而如3.1 節(jié)所述,在地面熱顫振試驗中氣動力模型輸入輸出量均為降階后插值點處的信號zs、fs,因此也需要對式(10)進行降階處理。
降階前后插值點處位移與力的轉(zhuǎn)換關(guān)系可表示為
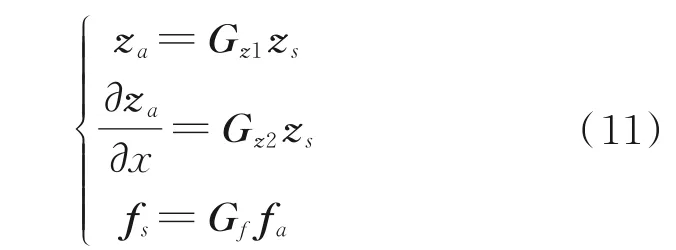
式中:Gz1、Gz2為位移插值轉(zhuǎn)換矩陣;Gf為力插值轉(zhuǎn)換矩陣。根據(jù)式(11),可將式(10)降階處理為

由減縮頻率定義可知,式(12)為頻域的結(jié)構(gòu)-氣動力關(guān)系式,而在試驗中傳感器輸入的響應信號及激振器輸出的力信號均為時域信號,因此需要將式(12)轉(zhuǎn)換至時域,該轉(zhuǎn)換過程可以通過最小狀態(tài)法有理函數(shù)擬合實現(xiàn),最終關(guān)系式為
式中A0、A1、A2、D、E和R均為有理函數(shù)擬合所得的系數(shù)矩陣。顯然,在式(13)中輸入為各個節(jié)點的位移、速度與加速度。輸出為節(jié)點應承受的非定常氣動力,并且計算為低階矩陣運算,可實現(xiàn)氣動力實時計算的目標。
4 模糊增益自適應PID 控制
地面顫振試驗需要采用電磁激振器將計算得到的等效氣動力加載至被測結(jié)構(gòu),而在該過程中各個激振器會通過被測結(jié)構(gòu)相互影響,為降低這種耦合效應導致的激振器加載偏差,需要采用控制算法對激振系統(tǒng)進行加載控制。
比例、積分和微分(Proportional integral derivative,PID)控制是目前應用最廣泛的控制技術(shù),由于其參數(shù)整定不依賴于受控對象的數(shù)學模型,因此在面對被測結(jié)構(gòu)具有時變特性的加載系統(tǒng)時,能夠在時變?nèi)珰v程中均保持較好的控制性能。此外,PID 控制器將每一個加載通道視為一個單輸入/輸出系統(tǒng)進行控制,則其余加載通道對該通道的影響可被視為外部擾動,因此當試驗加載通道數(shù)較多時,這種不考慮各通道解耦的控制方法在計算效率方面優(yōu)勢顯著。
由顫振發(fā)生原理可知,在地面顫振試驗中激振器預期加載信號與實際加載信號均為類正弦信號,因此信號加載的數(shù)值偏差可從正弦波的角度劃分為幅值偏差與相位偏差,而決定激振器加載精度的主要因素為相位偏差(在相位一致時幅值偏差可由比例增益環(huán)節(jié)快速調(diào)整)。在應對此類動態(tài)系統(tǒng)時,由PID 控制理論可知,其控制精度主要取決于微分增益,在理想模型中微分增益越大則控制精度越高。但是微分環(huán)節(jié)對噪聲等高頻擾動較為敏感,考慮到實際試驗中的信號質(zhì)量,較大的微分增益極易造成系統(tǒng)發(fā)散[14]。為了在控制精度可接受的前提下確保加載控制系統(tǒng)穩(wěn)定性,在此引入模糊控制理論對微分增益進行自適應調(diào)節(jié)。
模糊增益自適應PID 控制原理如圖7 所示,通過推導出PID 參數(shù)與加載偏差間的模糊關(guān)系,在原有PID 控制系統(tǒng)的基礎(chǔ)上增添模糊控制器,從而在系統(tǒng)運行中根據(jù)實時加載偏差對PID 參數(shù)進行調(diào)整(本研究中只調(diào)整微分增益Kd),從而保證受控系統(tǒng)的加載精度與穩(wěn)定性。
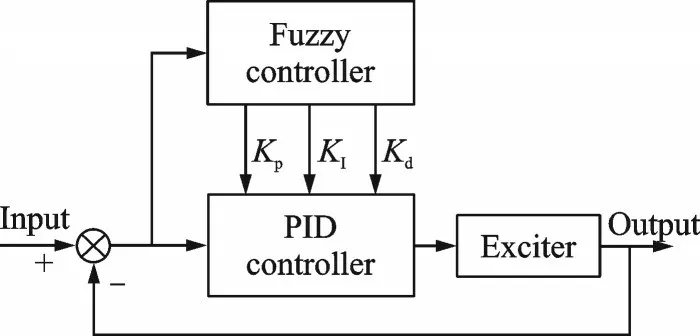
圖7 模糊增益自適應PID 控制方法Fig.7 Adaptive fuzzy PID control method
為了實現(xiàn)適用于本次受控對象的控制器構(gòu)建,首先需要明確加載偏差與PID 控制器性能間的模糊關(guān)系。依據(jù)經(jīng)驗,當理想信號與實際加載信號的相位偏差至多約±5°時,即視為激振器加載精度滿足試驗需求,此時被控系統(tǒng)的伯德圖如圖8 所示,對應的時域加載數(shù)值偏差如圖9 所示。
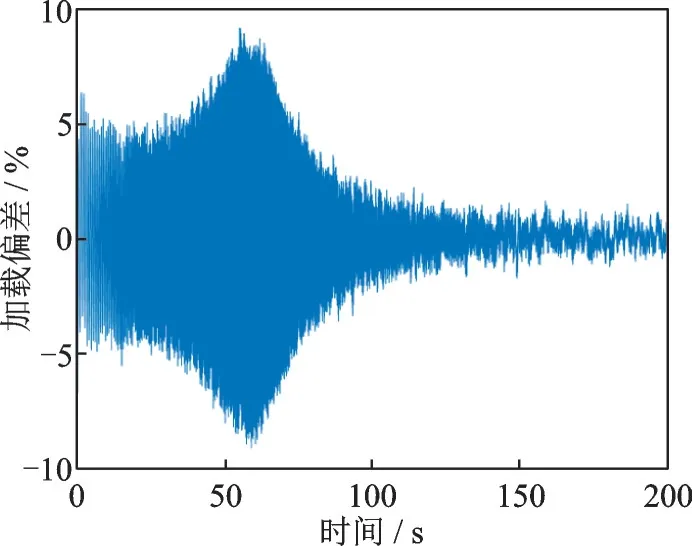
圖9 被控系統(tǒng)時域加載數(shù)值偏差Fig.9 Time domain loading deviation of the controlled system
由圖8、9 可知,加載相位偏差不超過5°對應的加載數(shù)值偏差應不超過10%,由于加載數(shù)值偏差可以在試驗進程中實時獲得,因此可以構(gòu)建加載偏差最大值Maxe與輸出PID 微分增益修正量Kd間的模糊關(guān)系:
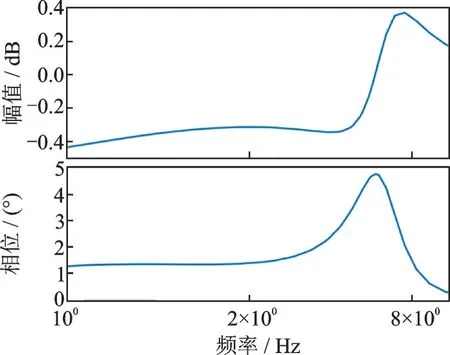
圖8 被控系統(tǒng)伯德圖Fig.8 Bode diagram of the controlled system
(1)Rule 1:If(MaxeisN)then(KdisN);
(2)Rule 2:If(MaxeisZ)then(KdisZ);
(3)Rule 3:If(MaxeisP)then(KdisP)。
其中,Maxe的論域應按照前文所述不超過10% 的限制條件對稱劃分,在此設(shè)置為[0.06,0.14],Kd的論域設(shè)為[—0.5,0.5],隸屬度函數(shù)構(gòu)建如圖10 所示。
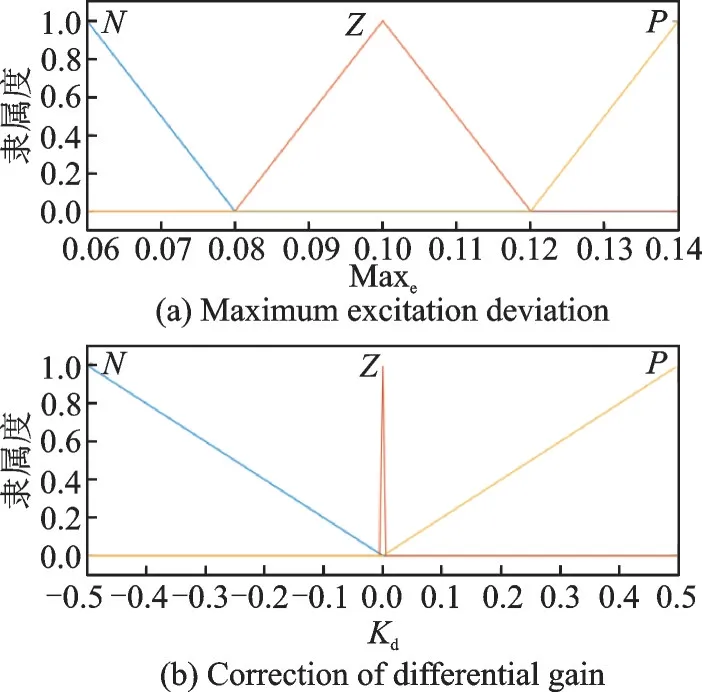
圖10 隸屬度函數(shù)Fig.10 Subordinating degree function
為驗證控制器效果開展掃頻試驗,向被測結(jié)構(gòu)兩個加載通道同時加載1~40 Hz 的掃頻信號,可得其中一通道在引入控制器前后的輸出信號如圖11 所示。顯然,模糊增益自適應PID 控制方法能夠在保證系統(tǒng)穩(wěn)定的前提下,較為顯著地提升激振力加載精度,滿足地面顫振試驗中多通道激振力精準加載的需求。
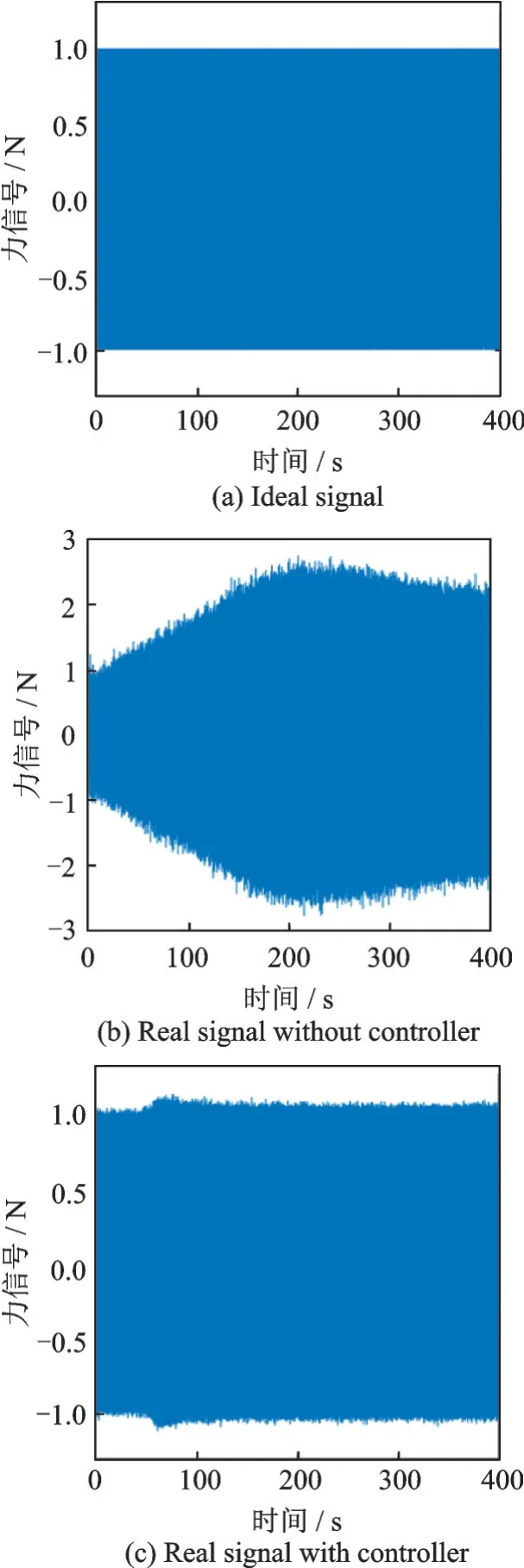
圖11 掃頻試驗輸入及輸出信號Fig.11 Input and output signals in frequency sweep test
5 地面顫振試驗系統(tǒng)集成
5.1 氣動熱環(huán)境模擬
本文采用石英燈輻射加熱方式模擬結(jié)構(gòu)承受氣動熱環(huán)境,加熱系統(tǒng)由石英燈管輻射加熱器、熱電偶、加溫控制儀和可控硅等組成,如圖12所示。加熱系統(tǒng)工作原理可概括為:系統(tǒng)通過布置于被測結(jié)構(gòu)表面的溫度傳感器獲取測點溫度,加溫控制儀根據(jù)測得溫度與預設(shè)溫度計算加載修正量并通過可控硅調(diào)整石英燈加熱器功率,實現(xiàn)溫度場的閉環(huán)控制。
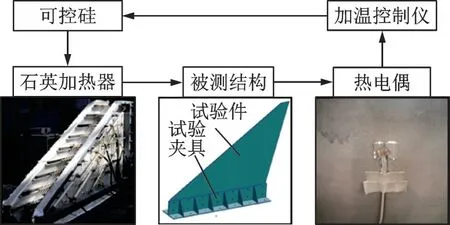
圖12 氣動熱環(huán)境模擬系統(tǒng)Fig.12 Aerodynamic heating simulation system
依據(jù)2.2 節(jié)計算所得溫度分布,將翼面劃分為8 個加熱溫區(qū),翼面兩側(cè)溫區(qū)對稱布置,加熱方案如圖13 所示。正式試驗溫升時間設(shè)定為70 s,其中1/5 與2/6 溫區(qū)為一組,并始終保持同溫,溫度由450 ℃升至720 ℃,溫升速率為4 ℃/s,3/7 溫區(qū)溫度由250 ℃升至390 ℃,溫升速率為2 ℃/s,4/8 溫區(qū)溫度由150 ℃升至220 ℃,溫升速率為1 ℃/s。
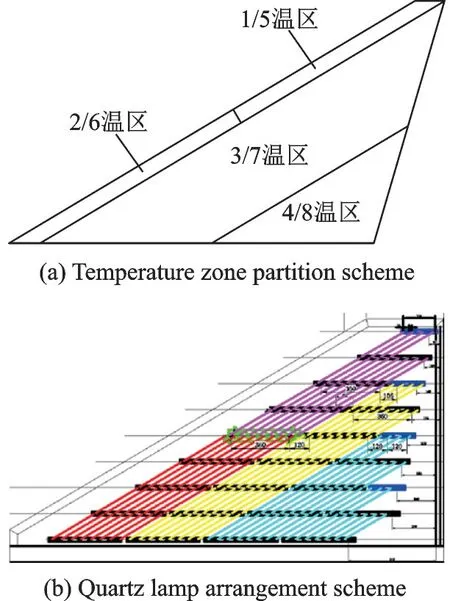
圖13 試驗結(jié)構(gòu)加熱方案Fig.13 Test structure’s heating scheme
5.2 結(jié)構(gòu)激勵與響應測量
結(jié)構(gòu)激勵采用模態(tài)激振器進行,同時設(shè)置隔熱連桿以保護激振器和力傳感器免受高溫影響。為提高高溫環(huán)境下響應測試信號質(zhì)量,試驗采用輕質(zhì)陶瓷桿將結(jié)構(gòu)響應信號引出高溫環(huán)境進行測量,如圖14 所示,相關(guān)文獻[15-16]已經(jīng)證明采用此類輕質(zhì)引申桿對結(jié)構(gòu)模態(tài)特性的影響及動響應信號傳遞精度均能滿足工程要求,可以用于地面顫振試驗。
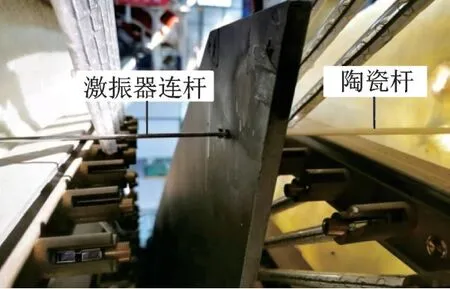
圖14 結(jié)構(gòu)測點處陶瓷桿引申裝置Fig.14 Ceramic rod extension device on measuring point
6 試驗測試與結(jié)果分析
利用第5 節(jié)所述氣動熱環(huán)境模擬系統(tǒng)與結(jié)構(gòu)激勵/測量系統(tǒng)集成構(gòu)建能夠模擬氣動熱環(huán)境的地面顫振試驗系統(tǒng),如圖15 所示,其中采用激光位移傳感器測量節(jié)點位移信號并微分獲得速度信號,采用加速度傳感器測量節(jié)點加速度信號。按照實際包線飛行過程中結(jié)構(gòu)的顫振臨界邊界時刻改變,因此在試驗系統(tǒng)中引入時變顫振邊界跟蹤模塊,該模塊通過在試驗過程中依據(jù)實時獲取的結(jié)構(gòu)響應來調(diào)整試驗風速,從而實現(xiàn)對時變顫振邊界的跟蹤與測試[16],該模塊與非定常氣動力模型、模糊PID 加載控制器均由NI 半實物仿真系統(tǒng)實現(xiàn)。
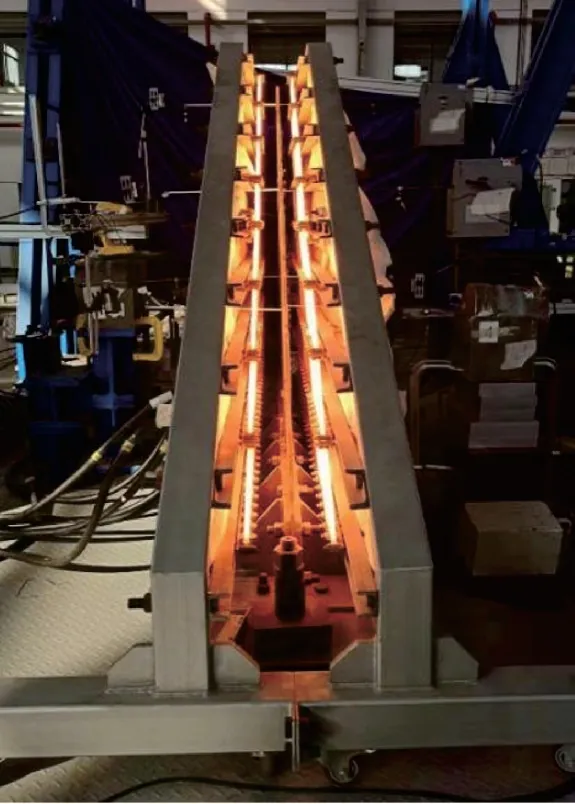
圖15 地面顫振試驗現(xiàn)場Fig.15 Ground thermal flutter test site
本次試驗中,正式溫升階段的初始狀態(tài)即為大梯度溫度場(450-250-150 ℃),考慮到傳熱特性結(jié)構(gòu)難以長時間保持該溫度場作為預熱狀態(tài)。為此,設(shè)定全結(jié)構(gòu)50 ℃作為預熱溫度場,并以5.1節(jié)設(shè)定的溫升率從該預熱溫度場直接升溫至最終狀態(tài)溫度場,并在加熱系統(tǒng)啟動100 s 達到初始狀態(tài)溫度場后開始正式試驗,地面顫振系統(tǒng)在加熱開啟時即以一個極低的空速運行,在即將達到試驗初始狀態(tài)溫度場前5 s 將空速調(diào)整為預實驗所得的初始值(對于本次試驗為1 500 m/s)并開啟時變顫振邊界跟蹤模塊。試驗所得結(jié)構(gòu)監(jiān)測點響應與顫振臨界速度曲線如圖16 所示,圖中時間軸包括空速預調(diào)整的0~5 s 及正式試驗的5~75 s。

圖16 地面顫振試驗結(jié)果Fig.16 Ground thermal flutter test results
選取工況點處的數(shù)值計算結(jié)果(即圖16 中三角形標記點)與速度跟蹤數(shù)據(jù)作對比,結(jié)果如表1所示,可以看出地面顫振試驗結(jié)果與分析結(jié)果較為接近,相對誤差均在10%以內(nèi),滿足工程顫振測試精度要求。

表1 地面顫振試驗結(jié)果及誤差Table 1 Ground thermal flutter test results and errors
7 結(jié) 論
本文研究實現(xiàn)了高超聲速飛行器熱顫振特性的地面測試與驗證,證實了該技術(shù)的可行性與測試結(jié)果的可信度,為高超聲速飛行器的顫振測試與評估提供了一種可行的試驗手段。具體結(jié)論如下:
(1)本文建立了多工況點氣動力綜合優(yōu)化縮聚方法,解決了時變結(jié)構(gòu)的氣動力降階難題,滿足了全飛行包線內(nèi)的地面顫振試驗需求。
(2)針對現(xiàn)有激振器加載控制算法控制帶寬較窄的缺陷,本文基于模糊邏輯實現(xiàn)了PID 控制參數(shù)的在線調(diào)節(jié)與整定,適應時變系統(tǒng)激振力控制,確保了不同溫度條件下的加載控制精度。
(3)本文搭建了地面熱顫振試驗系統(tǒng),實現(xiàn)了滿足高超聲速飛行器真實飛行條件的高溫環(huán)境及大溫變區(qū)間下顫振邊界的跟蹤與測試,獲得了溫度對顫振特性的影響趨勢。
(4)對于本文所采用的懸臂結(jié)構(gòu),氣動熱效應對結(jié)構(gòu)顫振特性的影響主要來源于材料彈性模量隨溫度變化導致的結(jié)構(gòu)模態(tài)頻率改變,而不均勻溫度分布造成的熱應力對結(jié)構(gòu)顫振特性影響不大。數(shù)值分析及試驗結(jié)果均表明,隨著溫度升高,翼面結(jié)構(gòu)的顫振頻率及顫振臨界速度均顯著下降,因此有必要研究高超聲速飛行器在不同航跡下的熱顫振特性,確保其在全設(shè)計包線內(nèi)的飛行安全。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39