基于優劣解距離算法的光儲配電網自適應虛擬慣性控制策略
2022-11-01 03:51:14楊歡紅
上海交通大學學報 2022年10期
余 威, 楊歡紅, 焦 偉, 周 澤
(上海電力大學 電氣工程學院, 上海 200090)
隨著可再生能源在配電側滲透率的不斷增高和電力電子技術的飛速發展,光伏兼具清潔無污染和維護成本低的優勢,仍具備較大的開發利用價值[1].但光伏出力不穩定,需與儲能模塊靈活配合,才能保證電力系統供電可靠性.目前光儲單元大部分經過電力電子設備接入電網,變流器的物理隔離作用導致系統的機械慣性不足,電網中存在擾動時,無法像同步發電機一樣為系統提供慣性功率[2].因此,如何采取新的手段來實現光儲配電網慣性調控的靈活性,從而提高協同控制效率成為亟待解決的課題.
將虛擬同步發電機控制策略引入電力系統需求側調頻,可以在換流器中模擬出發電機特性,提升系統抗擾動能力[3].文獻[4]將虛擬同步發電機應用于微電網,實現并網和離網靈活轉換.文獻[5]對虛擬慣量恒定(Virtual Synchronous Generator,VSG)展開深入研究,并對其進行完善,結合系統變化狀況能夠快速且準確地調節慣性時間常數值,增強系統穩定性.文獻[6]對各單元虛擬慣量進行研究,發現頻率不同時,電源提供的動態支撐功率隨之變化.文獻[7]在有功頻率控制過程中對同步發電機展開了更深入的研究,認為虛擬同步發電機的控制方法與系統的頻率變化率有關,當頻率變化率發生改變時,控制方式也應對應做出調整.此外,文獻[8]還提出了靈活虛擬同步發電機控制策略,認為最佳阻尼比是影響VSG系統振蕩的一個重要因素,在對此假設做出論證后作者還研究出了對應的控制策略,有效改善了系統動態指標數值,并提升了動態穩定性.文獻[9]研究了VSG頻率自恢復控制方法,能較高效地控制頻率波動,讓其在最短時間內恢復到穩態,且不會因復雜通信系統而波動.文獻[10]提出一種自適應慣性的VSG控制策略,通過參數的連續平滑調節,抑制并網逆變器輸出功率和輸出頻率的波動.文獻[11]在超級電容器側應用VSG控制,設計準同期控制單元,消除相位差對并離網切換的影響.上述文獻未考慮換流器參數及多光儲單元運行情況對控制策略的影響,為了改善系統動態響應能力,在研究過程中會借助VSG中虛擬慣量的靈活可調性.雖能在一定程度上達到控制目標,但也存在不穩定性,主要在于沒有充分考慮到虛擬慣性靈活調節受到多種條件的約束,例如瞬間釋放功率、換流器的容量限制等.因此,需充分考慮這些因素帶來的影響.
靈活虛擬同步發電機所具備的虛擬慣性靈活可控,當系統中的頻率發生變化時,虛擬慣性隨之進行動態響應,存在功率擾動的情況時,系統的頻率仍會保持穩定[12].并且隨著多光儲單元場景應用的增加,需全面考慮協同控制時各單元參數帶來的影響.本文提出一種基于優劣解距離算法(Technique for Order Preference by Similarity to an Ideal Solution,TOPSIS)的光儲配電網自適應虛擬慣性控制策略,以多指標評價體系為基礎,對VSG單元的虛擬慣量協同分配進行更深入的研究,優化系統動態響應能力,提升電網側的頻率質量,最后通過算例仿真驗證所提控制策略的有效性與優越性.
1 光儲單元的靈活虛擬慣性控制
1.1 模型的建立
考慮電力系統拓撲結構復雜性及多光儲單元接入電網形式多樣性,本文重點研究包含混合光儲單元的六端系統,如圖1所示.儲能裝置包括超級電容器(SC)和蓄電池(BAT),共包含3個光儲單元,VSG1和VSG2單元相同,VSG3單元由光伏模塊和超級電容器組成.G1和G2為傳統的發電機組,G1向系統提供恒定功率,G2負責系統的動態響應,即發生擾動時,補充功率缺額,保持頻率穩定; PV為光伏模塊.
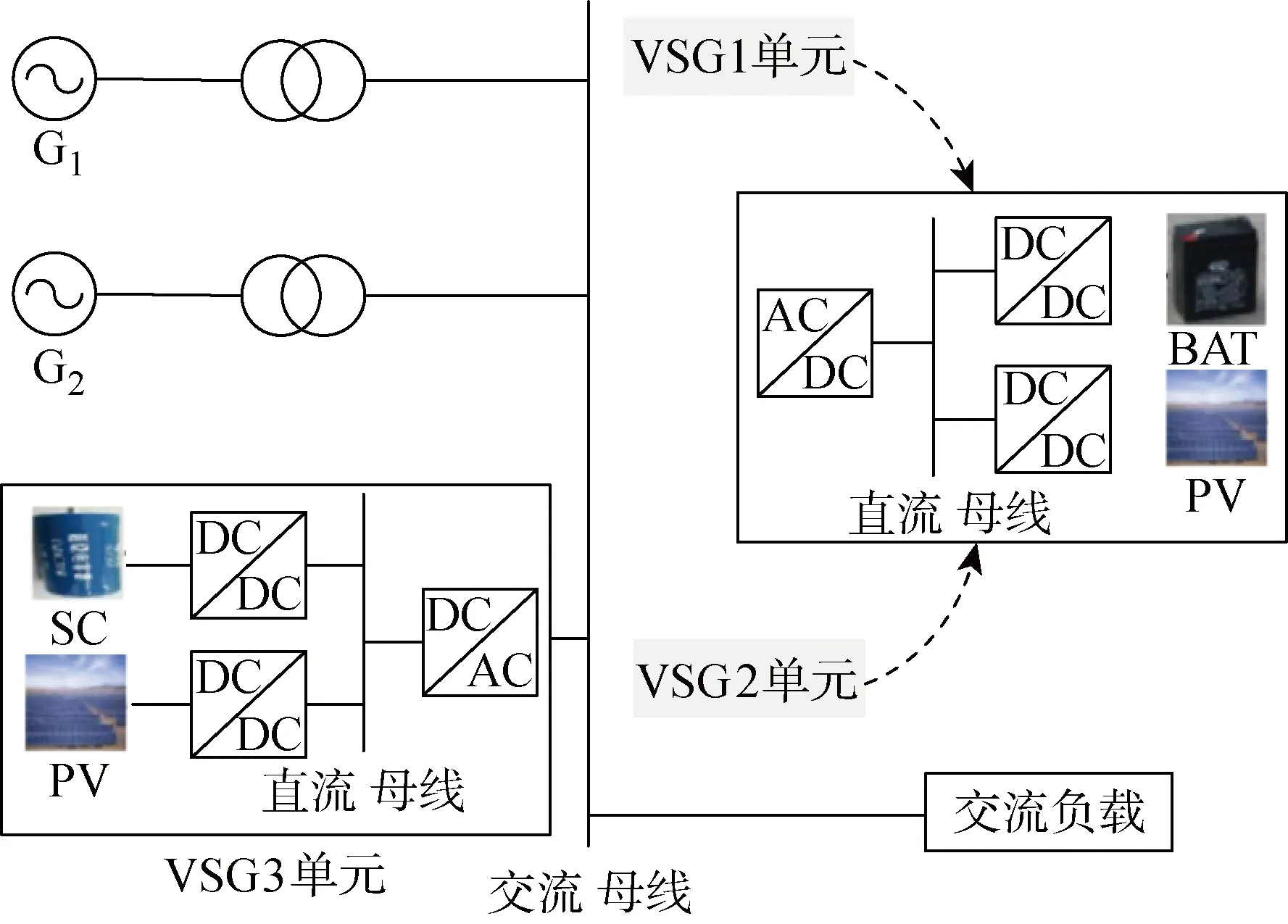
圖1 含混合儲能的六端系統拓撲Fig.1 Six terminal system topology with hybrid energy storage
1.2 靈活虛擬同步發電機控制策略
根據轉子運動方程,引入系統頻率變化率,并結合比例函數與指數函數得到靈活虛擬同步發電機控制(Flexible Virtual Synchronous Generator, FVSG)策略:
(1)
式中:H為虛擬慣量;H0為虛擬慣量初始值;f為電網側頻率;t為響應時間;M為所設定的閾值;ke、kf為虛擬慣量的的比例系數及指數系數.由式(1)可知,H取值與系統頻率變化率有關,理論分析得到暫態情況下系統頻率變化率越大,虛擬慣量取值越大,此時對頻率波動的抑制效果越好,有利于改善系統電能質量,并且頻率變化率小于設定閾值時,為一固定值,避免了頻繁的切換;頻率變化率大于設定閾值時,隨著頻率的變化率進行靈活變換,變流器為系統提供慣性功率支撐,維持系統頻率穩定,提高電能質量.ke、kf在頻率變化率的基礎上對虛擬慣量的大小進行進一步調整,其取值需兼顧虛擬慣量的大小和對系統穩定性的影響.系統正常運行時頻率值比較穩定,頻率變化率很小,此時系統的虛擬慣量保持恒定為H0,避免了在正常運行時虛擬慣量的頻繁切換對系統的穩定運行帶來沖擊,本文研究依據文獻[13]ke、kf分別取25, 0.5.
圖2所示為對應控制框圖,圖中:Pref為系統有功功率參考值;Po為光儲單元輸出功率;Kd為阻尼系數;ωg為系統角頻率;ω為光儲單元角頻率;1/s為積分環節.

圖2 FVSG控制框圖Fig.2 Block diagram of FVSG control
1.2.1考慮荷電量影響 上述控制策略引入系統頻率變化率進行慣性支撐,光儲單元自身參數及性能也會對虛擬慣性的提供產生影響,例如蓄電池充放電極限、頻率變化率、系統單位時間功率允許波動量等.蓄電池具體充放電情況為
(2)
式中:SSOC為蓄電池荷電狀態;a為蓄電池放電時的極限值;b為蓄電池充電時的極限值.根據荷電狀態進行控制,當蓄電池處于極限情況下,無法正常工作,僅考慮SOC與虛擬慣量H之間的關系即可.穩態運行時,有功功率、角頻率以及虛擬慣量之間的關系如下:
(3)
式中:Pin為光儲單元輸出有功功率給定值; ΔP為有功功率的變化量.當蓄電池在充放電極限狀態時,希望P盡量小,角頻率變化量在短時間內的變化較小,忽略不計,荷電量影響下H的表達式為
(4)
式中:k1、k2為虛擬慣量相關系數.若蓄電池荷電量處于極限狀態,H的值會不斷減少,這主要是因為反正切函數在發揮作用.當H變小后,有功變化量ΔP也會相應變小,蓄電池減少出力,本文所提控制策略擺脫了固定慣量的弊端.
1.2.2非荷電量影響 在控制過程中,系統頻率變化率、換流器容量以及系統單位時間功率可調量等因素十分關鍵.H值應控制在較小的范圍內,此時系統內部的功率變化量就會減小,換流器的負擔也會相應減輕.此外,如果VSG系統單位時間內有功變化量較大,那么也應該將H的值控制在較小的范圍內,從而保證系統功率變化率在穩定運行范圍內.由此可知,如果蓄電池處于正常工作狀態時,虛擬慣量H的表達式為
H=η1Hf+η2HC+η3HP+H0
a≤SSOC≤b
(5)
式中:η1、η2、η3為光儲單元影響參數的權重系數,3者之間的總和為1,其中的某一個值越大,意味著該影響因素所對應的權重系數越大;Hf、HC、HP為3個不同的虛擬慣量,它們分別受不同因素影響,其中Hf受頻率變化率影響,HC受換流器容量影響,HP受系統單位時間功率可調量影響;k3~k8為虛擬同步發電機控制的相關系數;C1為換流器瞬時交換功率;CN為換流器額定容量;ΔPt為單位時間功率變化量;ΔPtmax為單位時間功率可調量.由式(5)可知,系統頻率變化率增大時,H增大;電力電子換流器交換功率增大時,H減小;系統單位時間功率變化量增大時,H減小,該數值變化符合系統運行時的實際情況.在非SOC影響的情況下,如果換流器處在極限運行的狀態,為了保證系統的穩定運行,可以對H進行調整.
蓄電池穩定運行,著重分析系統頻率變化率、換流器容量以及系統單位時間內功率可調量對蓄電池的作用.由于換流器瞬時交換功率增大,臨近額定容量時,H取較小值,功率變化量隨之變小,換流器的出力減少.VSG單位時間內有功變化量增大,H隨之變小,功率變化量也會減小,保證系統功率在允許范圍內波動.綜上所述,可以得知虛擬慣量控制策略受多個因素影響:
(6)
式中:H1、H2、H3分別為光儲單元VSG1~VSG3向系統提供的虛擬慣量.如果蓄電池處于穩定運行狀態,那么可以通過分析其余因素來得出H的數值.蓄電池如果處于極限運行狀態,所提控制策略就會受反正切函數影響,則H變小,P也變小,蓄電池出力減少,且過充和過放現象更明顯,H降低越快,控制作用就更加明顯.所提控制策略可根據實際情況靈活調整H,從而達到改善蓄電池工作情況的作用.
2 多光儲單元系統的協同運行
2.1 擾動下協同控制策略
從響應速度方面,超級電容器的效果較為理想,當系統內部存在高頻擾動時,由超級電容器向系統提供慣性功率支撐,但是超級電容的能量密度較小,因此儲存能量效果并不突出.當超級電容的容量被耗盡時,需用蓄電池向系統供能,提高動態響應穩定性.在高頻干擾下,為了由超級電容實現慣性支持,并維持蓄電池輸出功率不變,對各VSG單元的虛擬慣量進行合理分配,以保持有功出力恒定.
(7)
式中:λ為一固定值.
超級電容受其體積和能量密度的影響,儲存電能容量有限,超出容量范圍時,繼續使用會影響其使用壽命及電能質量,因此系統頻率變化率較大時,需對上述控制策略進行改進.當高頻擾動為正,在能量儲備供給慣性以補償能量缺口時,需減小VSG3單位的虛擬慣量,用蓄電池來抑制高頻干擾;若系統中的功率擾動為負值,需減小各單元輸出功率,減小VSG3單元出力,保證超級電容兩端電壓在給定范圍內,以延長其壽命,改進后控制策略如下.
dP/dt≥0時,
(8)
dP/dt<0時,
(9)
式中:δSOCl為第l個VSG單元中儲能模塊的實際荷電狀態.
2.2 基于TOPSIS算法的多光儲單元協同控制
針對儲能裝置為蓄電池的多光儲單元協同控制,對光儲單元的結構進行分析研究,得到影響光儲單元運行的主要因素如下:蓄電池荷電量δSOC、蓄電池允許功率波動范圍ΔPtBAT、電力電子換流器允許功率波動范圍ΔPN、系統單位時間內允許功率波動范圍ΔPtmax.首先根據各VSG單元中蓄電池的總剩余能量對系統的總慣量進行調整,含蓄電池的多光儲單元總虛擬慣量為
HT=αke|df/dt|k2
(10)
式中:α為調整系數,確保根據光儲單元的容量進行慣性功率支撐.
引入優劣解距離法,又稱逼近于理想值排序算法,找到最佳虛擬慣性功率分配方案,將各光儲單元為系統提供慣性功率設定為一分配方案,系統中所有的光儲單元構成方案集,配合蓄電池的影響指標,構成評估矩陣:
(11)
各光儲單元構成方案集A,A={a1,a2,a3};δSOC、ΔPtBAT、ΔPN、ΔPtmax構成屬性向量;評估矩陣中元素,如x12,表示第1個光儲單元在第2個影響因素中的評分.
制作加權規范矩陣,確定各屬性達到最好值的方案,即最優解Z*,以及各屬性為最壞值的方案,即最劣解Z0,算出所求距離,其中第i個慣性支撐方案到最優解的最近距離及最劣解的最遠距離:
(12)
(13)

然后計算各方案的虛擬慣性功率分配比:
(14)
最終得到協同控制下各個光儲單元的虛擬慣性系數:
(15)
式中:Hl為經TOPSIS算法評估后第l個VSG單元向系統提供的虛擬慣量.
圖3所示為引入TOPSIS算法后的多光儲單元協同控制流程圖,圖中:fN為系統額定頻率,一般取50 Hz;ΔPtBATl為第l個光儲單元的蓄電池允許功率波動范圍;ΔPNl為第l個光儲單元的電力電子換流器允許功率波動范圍;ΔPtmaxl第l個光儲單元的系統單位時間內允許功率波動范圍.首先根據系統變化率確定系統虛擬慣量系數,得到各光儲單元向系統提供的總虛擬慣量;然后引入TOPSIS算法,根據影響蓄電池運行的4個影響因素,確定指標體系,構造評估矩陣,求出最優解和最劣解;最后根據各方案到最優解和最劣解的距離,確定方案的最終排序,得到最優的功率分配策略.

圖3 多VSG單元協同控制流程圖Fig.3 Flow chart of multi-VSG unit cooperative control
3 仿真分析
3.1 協同控制策略驗證
為深入探究所提協同控制策略的可行性,在RT-LAB硬件(OP5600仿真機)搭建測試平臺,結構框圖如圖4所示.將所提控制策略應用于數字信號處理器(Digital Signal Proces, DSP)中,并與負荷控制器、微源控制器及功率轉換系統相連接,產生的脈沖寬度調制(Pulse-Width Modulati, PWM)連接信號輸入端.本研究中,光照強度均取 1 000 W/m2,儲能裝置額定電壓為310 V,各光儲單元虛擬慣量H均取1.5.
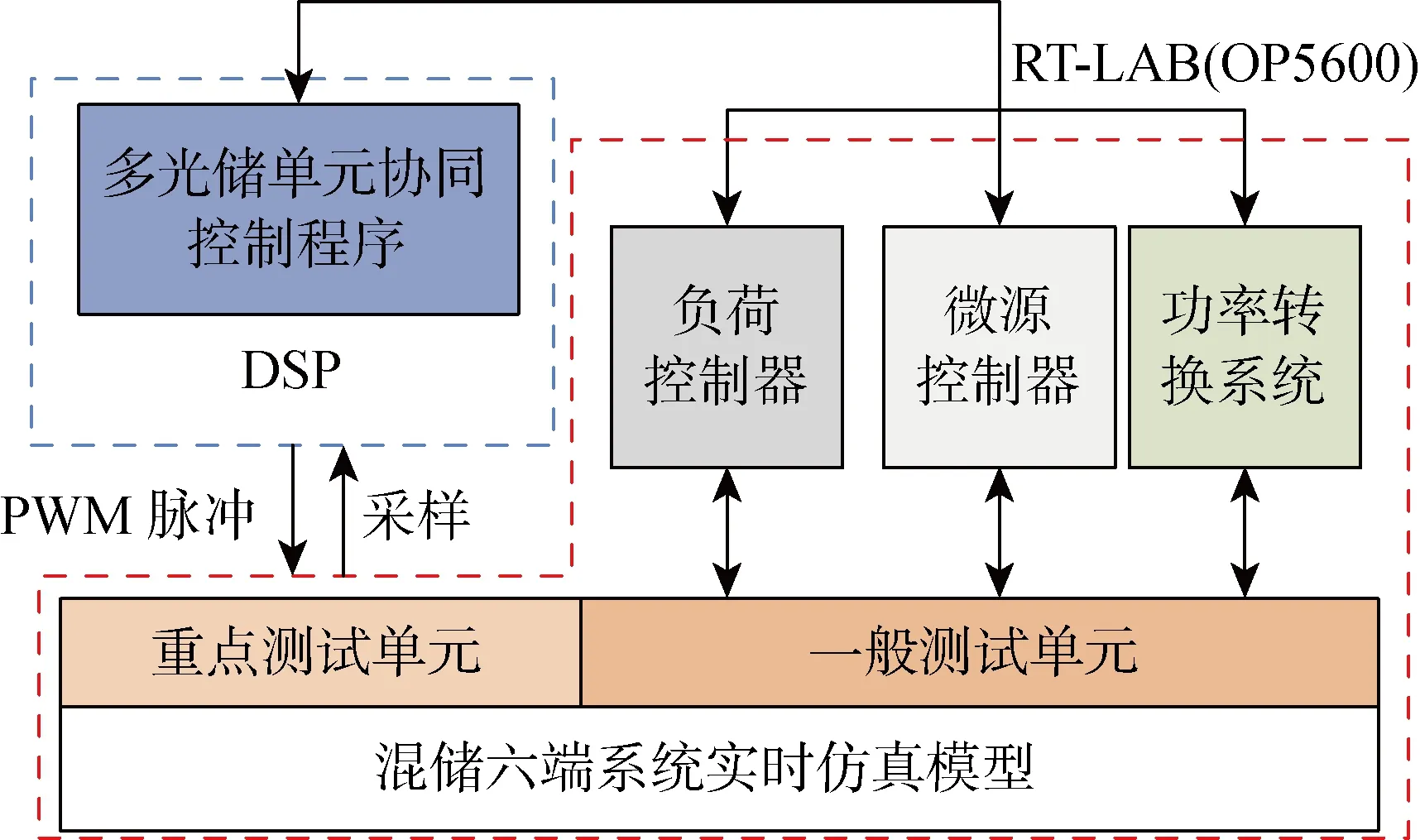
圖4 測試平臺設計框圖Fig.4 Block diagram of test platform design
高頻擾動出現后,對超級電容器容量充足時所提協同控制進行試驗驗證.運行初期,系統穩定工作,在系統運行5 s后,增加3 kW負載至系統交流側,試驗當中各VSG單元慣性參數和有功出力變化如圖5、6所示.

圖5 高頻擾動下慣性系數變化Fig.5 Variation curves of inertia coefficient in high frequency control
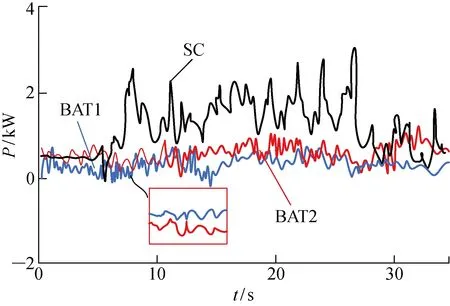
圖6 高頻擾動下有功出力變化Fig.6 Variation curves of active output in high frequency control
由圖5、6可知,初始狀態各光儲單元虛擬慣量大小相等,均為設定值1.5.系統增加負載后,對頻率造成擾動,此時由超級電容優先調整出力,向系統提供功率缺額,儲能裝置為蓄電池的光儲單元出力基本不變,減少其充放電次數,延長使用壽命.圖5、6說明在暫態情況下,各光儲單元應用所提控制策略后,超級電容可以快速響應,提供支撐功率,同時也達到減小蓄電池充放電次數的目的.
圖7、8分別為協同出力下各端慣性系數以及有功出力.當超級電容兩端電壓不在給定范圍時,即電能儲存容量較低時,需與含蓄電池的光儲單元協同出力.由圖7可知,同樣在初期給系統增加3 kW交流負載,各光儲單元虛擬慣性初始值均為1.5,此時超級電容兩端虛擬慣量大小基本不變,主要由蓄電池向系統提供功率缺額,減小超級電容端供電壓力,并且由于蓄電池性能參數不同,提供的虛擬慣性功率大小也不同.圖7、8表明,協同控制可以根據蓄電池的荷電狀態實現各儲能裝置的有功出力合理分配,儲備效果更好,系統更加穩定.
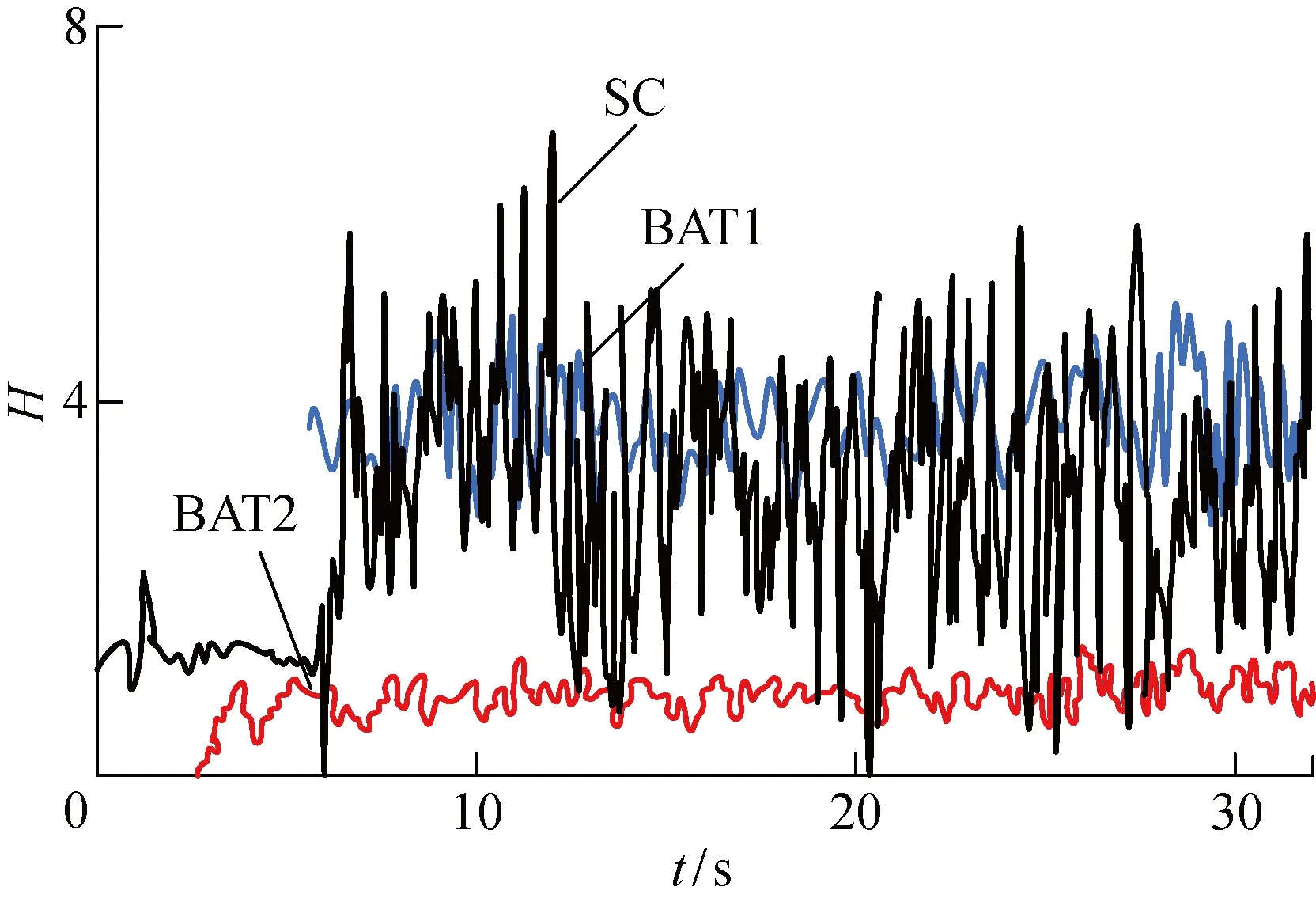
圖7 協同出力下各端慣性系數Fig.7 Inertia coefficient of each end in coordinated force
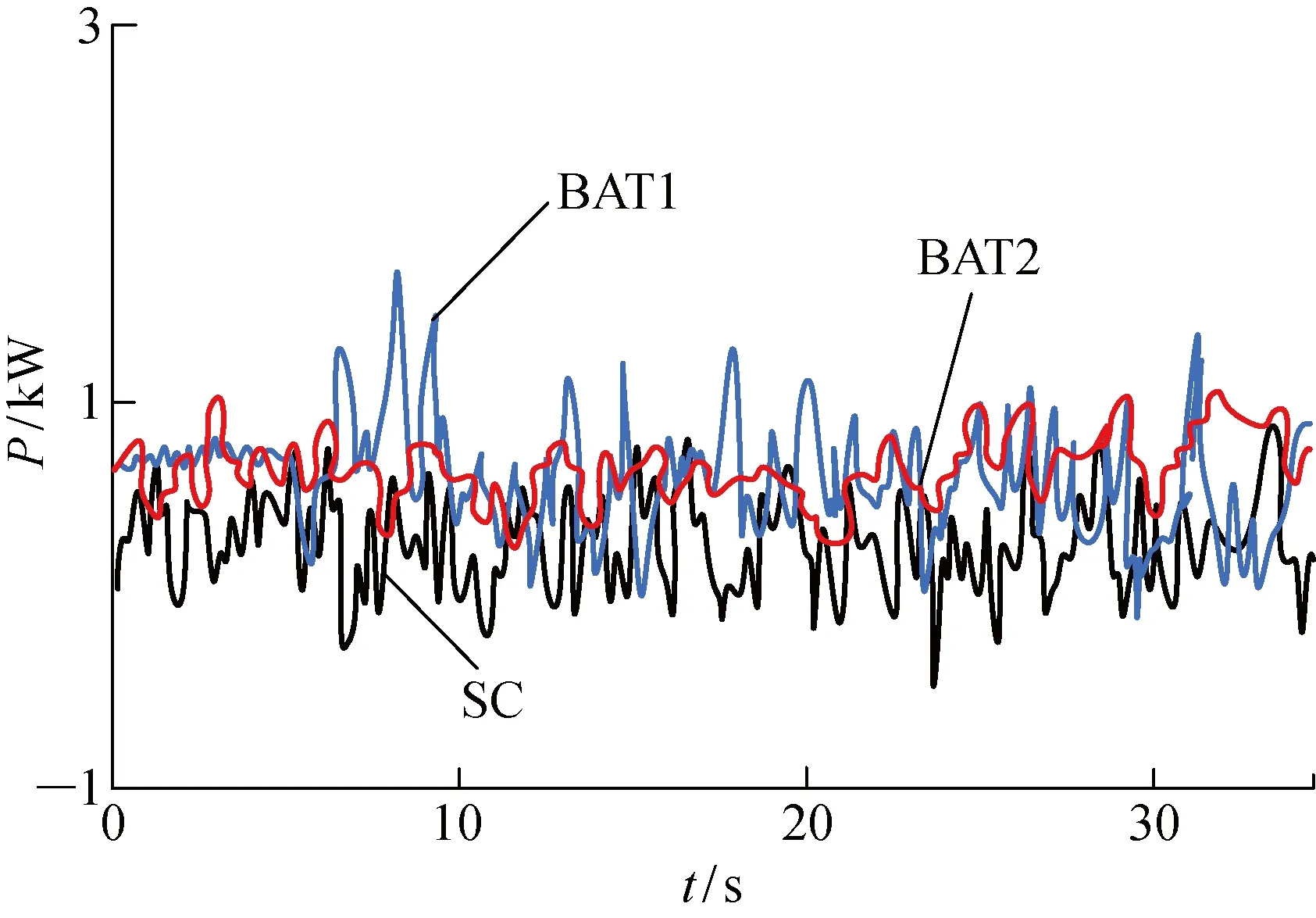
圖8 協同出力下各端有功出力Fig.8 Active output of each end under coordinated output
3.2 多指標影響下優化效果
利用引入優劣距離算法后的協同控制策略,對慣性支撐能力進行合理分配.采用控制變量法,將3個光儲單元的荷電狀態、蓄電池允許功率波動范圍、系統單位時間內允許功率波動范圍保持一致,改變換流器額定功率,分別取2、4、6 kW,系統穩定運行一段時間后,增加4.5 kW交流負載,觀察各端參數變化情況.圖9所示為額定功率不同時各端慣量和有功輸出變化,圖中Pol(l表示曲線1, 2, 3)代表各光儲單元輸出功率,負載增加后,系統功率缺額增大,各光儲單元向系統提供不同大小的虛擬慣性功率.可知,電力電子換流器的額定功率越大,供電可靠性越高,提供的慣性功率越多;額定容量越小,提供的慣性功率越少,保證小容量的光儲單元在安全運行范圍內運行,同時又能增加系統動態響應能力,具有較強的實用性.

圖9 額定功率不同時各端慣量和有功輸出變化Fig.9 Change of inertia and active power output of terminals at different values of rated capacity
當各評價指標存在差異時,取其差異最大的評價指標作為根據進行虛擬慣性功率的分配,對其進行試驗驗證,各VSG單元參數如表1所示,蓄電池荷電量及換流器額定功率不同,其余評價指標均相同,在系統運行5 s后,系統有功負荷減少5 kW.暫態初期,各VSG單元可用容量均較多,此時以蓄電池的荷電量作為主要評價指標,隨著各單元向系統提供有功功率,各VSG單元可用容量出現差異,此時以換流器容量作為主要評價指標.由表1可知,光儲單元VSG1的數值最差,所提控制策略開始減小其向系統提供的虛擬慣性功率,防止其出現過度放電的情況.
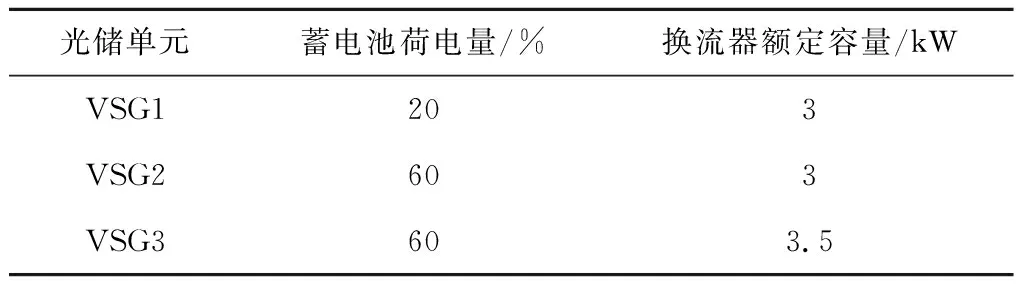
表1 VSG單元參數設定Tab.1 VSG unit parameter setting
圖10所示為多指標差異時各端慣量和有功輸出變化.圖10表明,所提控制策略可以憑借各個評價指標的實時差異進行虛擬慣性功率的分配,保證系統的安全穩定運行.
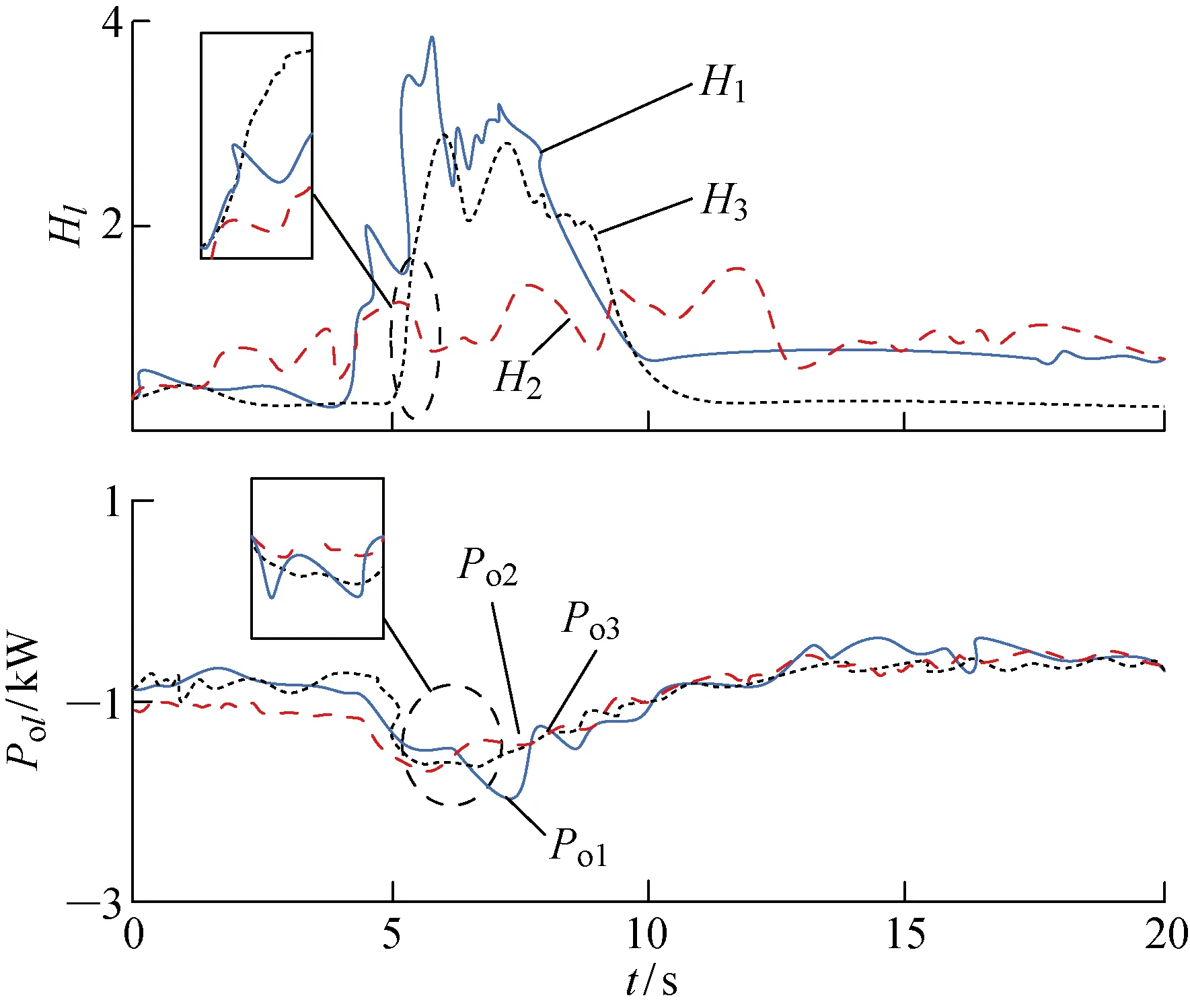
圖10 多指標差異時各端慣量和有功輸出變化Fig.10 Change of inertia and active power output of terminals with difference of multiple indicators
4 結論
針對多光儲VSG單元的協同運行問題進行了研究,搭建了含混合儲能裝置的六端交流電網模型,通過理論研究和仿真分析得出如下結論:
(1) 提出一種多VSG單元協同控制方法,系統發生擾動時,初期由響應速度較快的超級電容提供功率支撐;容量不足時,蓄電池與其協同出力,考慮荷電量及非荷電量影響下的控制策略,以改善蓄電池運行工況.
(2) 為了更加深入地進行多指標綜合評價下多光儲單元之間的協同控制研究,引入優劣距離算法,選取換流器允許功率波動范圍、儲能裝置允許功率波動范圍等因素作為協同控制的評價指標,根據評價指標的優劣程度,對各VSG單元的慣性支撐能力進行準確評估,為功率分配提供參考.
(3) 根據六端交流系統的拓撲結構,搭建硬件在環試驗平臺,經過試驗證明控制策略的可靠性,并通過仿真試驗證明了該方法能夠根據不同的運行特性,實現不同的功率輸出,并優化儲能儲備.在功率擾動的情況下,各儲能裝置在不影響電能質量的前提下,系統可提高系統動態響應能力.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26