小型無避讓立體停車裝置設計
2022-11-01 11:45:04閆存富王一鳴喬雪濤符幫尚
兵器裝備工程學報 2022年10期
關鍵詞:設計
閆存富,王一鳴,喬雪濤,符幫尚
(中原工學院 機電學院, 鄭州 451191)
1 引言
隨著我國人們生活水平的不斷提高和制造業的快速發展,汽車已成為人們出行的必備工具,城市中急劇增加的汽車保有量使傳統地面停車方式不能滿足人們的停車需求,停車難問題已成為城市管理者面臨的重要問題之一。機械式立體停車裝置具有容量大、單車均占地面積小等優點,成為解決停車難問題的一種重要途徑,但機械式立體停車裝置整體占地面積大,一次性投資大,使用和維護成本較高,不適合在城市已建成的老城區修建。因此設計一種適用于早期建成的老城區停車的小型停車裝置成為人們近幾年研究的熱點問題。焦博新等設計了一種新型立體跨路停車裝置,提高了空間利用率,但因為橫跨在道路上方,限制了在道路上通行車輛的高度。閆存富等設計了一種無避讓上擺下移式小型立體停車裝置。孟廣耀等提出一種九宮格式新型立體車庫的設計方案,完成了整體結構設計,并采用 ANSYS 軟件對設計的立體車庫進行分析。張天宇等針對城市老舊小區的實際情況,設計了一種3層10車位小型柱式立體停車裝置。胡建忠等以當前社會上存在的雙層式停車車庫為基礎,按照嵌套式原理設計了一種嵌套式小區立體停車裝置,采用Solidworks進行三維建模設計,利用Simulation受力分析組件對停車裝置主要零件進行靜態載荷分析。
本文中設計一種小型無避讓立體停車裝置,實現在一個地面停車位上停放兩輛汽車,且兩輛車的存取過程互不影響;主要對停車裝置總體方案、主要運動部件、液壓傳動系統及控制系統進行設計,并對存取車原理進行運動仿真。
2 立體停車裝置設計
2.1 停車裝置總體設計
小型無避讓立體停車裝置采用框架式結構,包括上、下2個停車位,可停放兩輛車,上車位采用移動、旋轉、升降方式停車,下車位直接將車停在地面上。主要由停車裝置本體、上車位載車板、升降機構、立柱、水平行走機構、旋轉機構及控制等部分組成,可以安裝在道路兩側及空間較小的地方。在車輛存取過程中,對各機構運動平穩性要求較高,綜合考慮各種驅動方式的優缺點后,確定各機構均采用液壓驅動方式,停車裝置模型如圖1所示。
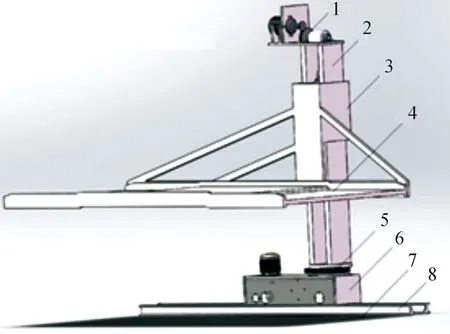
1.升降裝置; 2.立柱; 3.立柱套筒; 4.上載車板; 5.旋轉機構;6.水平行走箱; 7.下車位; 8.移動導軌
通過對小轎車進行統計分析,確定所停車輛的參數為 4 800 mm×1 800 mm×1 600 mm,載車板尺寸為4 800 mm×2 000 mm,車質量為1 800 kg,能滿足90%家庭轎車的停車需求。因此地面層停車位高度取1 800 mm,停車裝置整體高度取3 500 mm,司機直接將車開到地面車位上,地面車位占地面積取5 000 mm×2 000 mm,因上車位需要旋轉90°,上車位載車板在水平旋轉過程中如圖2所示。
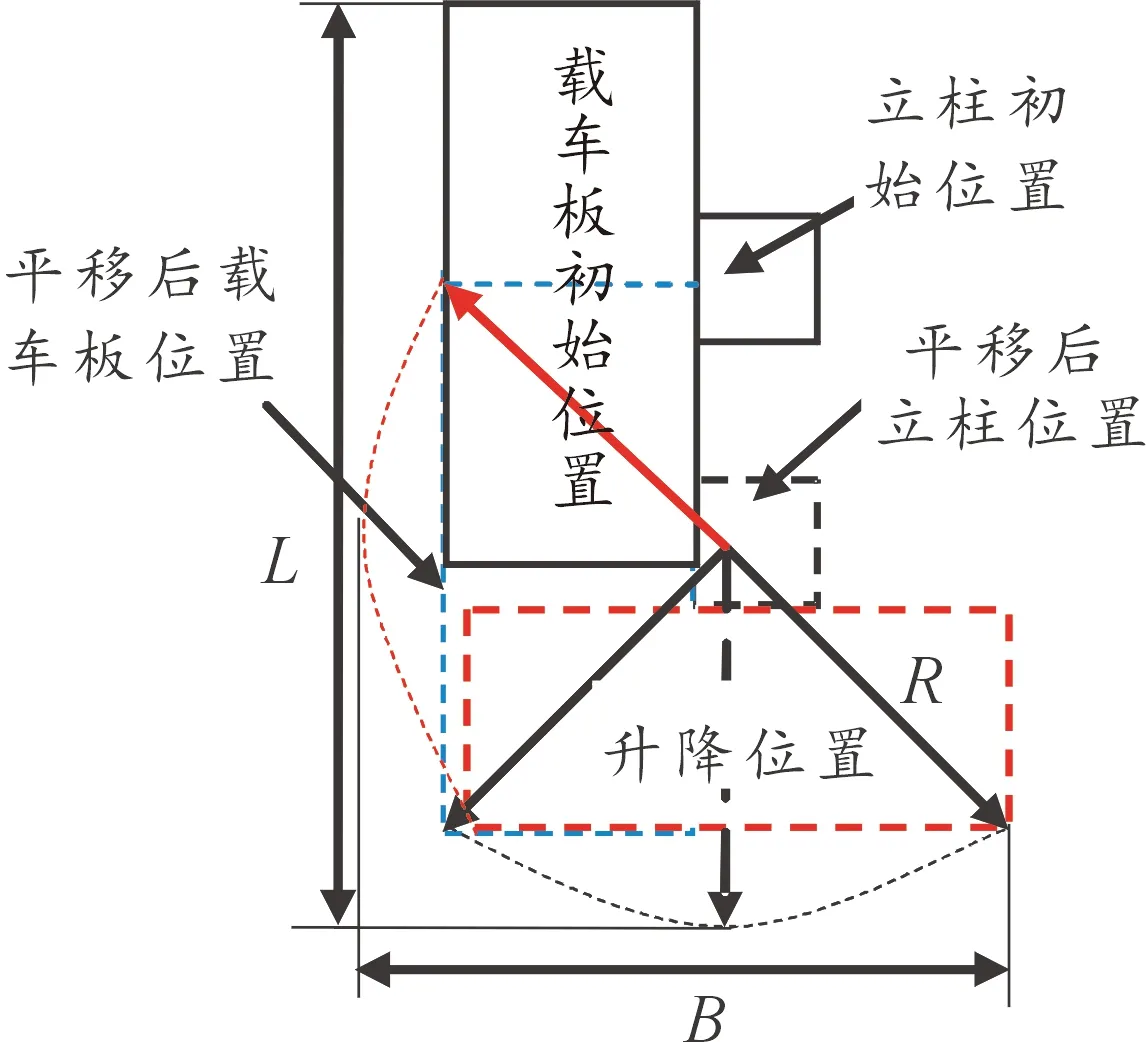
圖2 停車過程示意圖Fig.2 Parking process envelope space
設立柱位于載車板縱向中間位置,立柱中心到載車板外邊緣為2 000 mm,則載車板旋轉最大半徑計算為:

則上車位水平旋轉過程中水平面內包絡空間為:=3 300+4 800=7 100 mm,=3 300 mm。
為避免載車板旋轉時相鄰車位之間產生干涉,2個相鄰的車位之間應至少保持3 300 mm距離。為了保證運行的安全性,兩相鄰車位之間應至少間隔4 000 mm。上車位車輛存放過程如下:司機首先將車停在停車位旁邊掃存車碼,控制系統發出存車指令,控制水平行走液壓缸動作驅動行走機構沿設在地面上的導軌移動,帶動立柱和上車位載車板水平移動到指定位置后;控制系統發出旋轉指令,旋轉液壓缸發出動作驅動立柱旋轉一定角度,使載車板旋轉至指定位置,控制系統再發出下降指令使上車位載車板沿立柱下滑到地面,司機直接將車開到載車板上后下車鎖門離開,載車板沿立柱向上移動到指定位置,后旋轉移動到指定的位置,行走液壓缸帶動立柱和上車位載車板水平移動到原定位置,完成上車位的停車過程,控制系統開始計時收費。取車時,司機先掃碼繳費后,控制系統發出指令,驅動行走、旋轉和升降機構產生動作,將車輛降落到地面,司機直接上車、打火、掃碼付費、開車駛離即可。上車位車輛的整個存取過程不受下車位車輛的影響,實現了兩車位上的車輛無避讓存取。當需要將車停到下車位上時,司機可直接將車開到停車位上,掃碼計費離開即可;取車時直接將車開出,掃碼付費即可。
2.2 上車位水平行走和旋轉機構設計
水平行走機構用來實現上車位載車板在地面上移動功能,旋轉機構主要實現上車位載車板的旋轉功能,水平行走和旋轉機構如圖3所示。
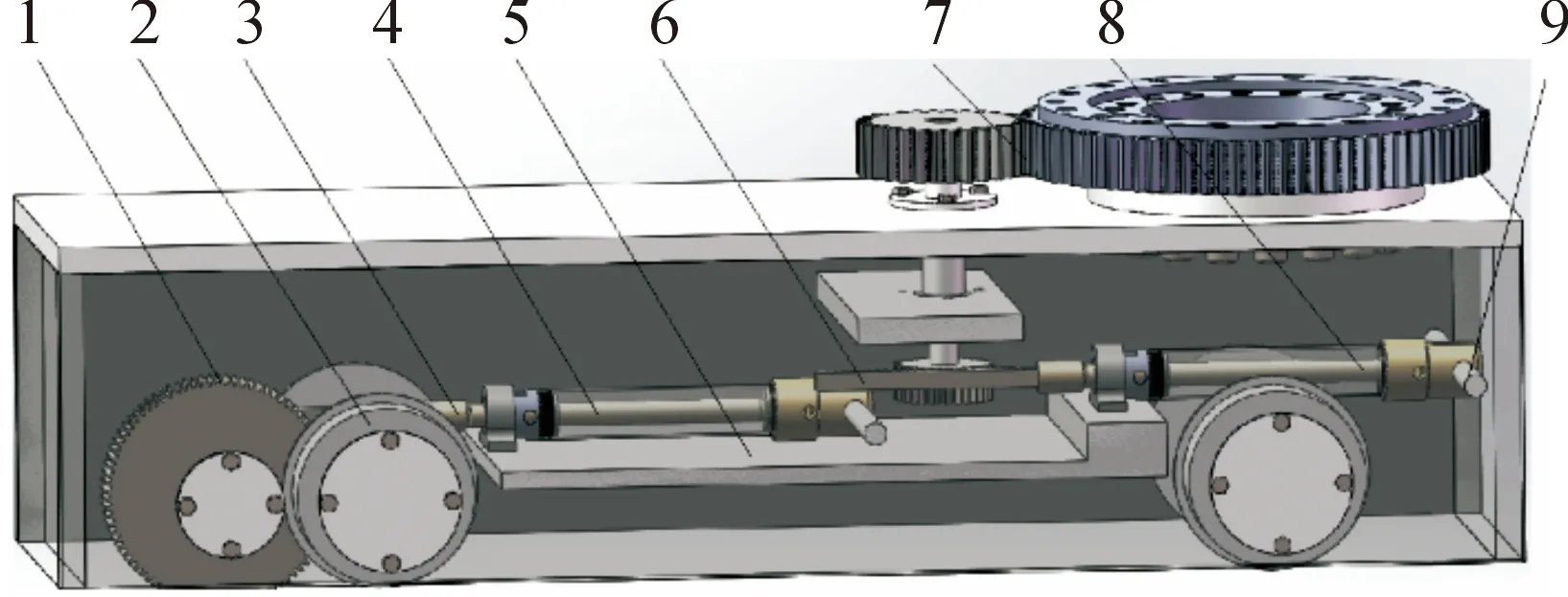
1.行走傳動機構; 2.行走輪; 3.行走活塞桿齒條; 4.行走液壓缸; 5.液壓缸固定板; 6.旋轉活塞桿齒條; 7.齒輪傳動副; 8.旋轉液壓缸; 9.液壓缸固定銷
行走箱用來支撐立柱及旋轉機構,通過底部的行走輪沿固定在地面上的導軌移動,在兩根行走輪軸之間設置液壓缸固定板,行走箱的總體設計尺寸為長、寬、高分別為1 700 mm、500 mm、390 mm,本設計中行走時間設為10 s。立柱通過回轉支承規定在行走箱上,與旋轉外齒圈連接。行走液壓缸通過液壓缸底座固定在行走箱下部,活塞桿齒條通過齒輪傳動推動行走箱移動,為減小齒條長度,齒輪傳動采用增速形式,傳動比設為2。旋轉液壓缸固定在行走箱下面的液壓缸支座上,活塞桿齒條通過齒輪傳動帶動旋轉外齒圈旋轉,帶動立柱旋轉,齒輪傳動比為1∶2,為保證旋轉穩定性,旋轉速度取1.5 r/min。為保證行走和旋轉后能停在準確位置,在立柱旋轉前后的位置設置角度限位裝置,由PLC控制行走液壓缸和旋轉液壓缸的起動和停止。考慮載車板設置在立柱的單側,為減小行走時立柱的傾覆力矩,在立柱的后側載車板對應位置設置配重以減少傾覆力矩。
2.3 升降機構設計
升降機構的主要功能是實現上車位載車板的下降和上升運動,升降時間為10 s。升降裝置主要由升降液壓馬達、鋼絲繩、立柱組件和控制部分組成;液壓馬達安裝在立柱上端面,通過鋼絲繩與裝在立柱上的立柱套筒連接,立柱套筒與載車板固定連接,液壓馬達通過滑輪鋼絲繩驅動立柱套筒沿立柱上、下滑動,實現載車板和車輛的上升和下降運動。
為防止升降過程中由于突然斷電導致的載車板突然墜落現象的發生,在升降裝置中設置斷電制動裝置。當發生斷電時,制動抱閘抱緊升降液壓馬達軸,液壓馬達不能轉動,使升降裝置停在原位置不動。同時在立柱上部設置限位裝置,保證載車板停在規定的高度位置,采用PLC對升降裝置的運動進行控制。
2.4 安全防護裝置
設計的小型立體停車裝置安全防護裝置如下:
1) 在升降機構中設置斷電制動裝置,當車輛停到預定位置或存取過程中突然斷電時,在斷電瞬間抱閘能夠及時抱緊液壓馬達輸出軸,使其停止轉動,從而避免載車板發生滑落現象。
2) 設置手動存取車機構,當臨時停電時,采用手動方式實現車輛的存取。
3) 設置急停裝置,當發生緊急情況時,及時停止停車裝置的所有動作。
4) 設置閃光燈,在存取車輛時,閃光燈開始閃爍,用以提醒相關人員注意安全。
2.5 運動仿真驗證
取行走時間10 s,旋轉速度1.5 r/min,升降時間10 s進行運動仿真。圖4為所設計的停車裝置運動仿真典型位置示意圖。其中圖4(a)為初始狀態;圖4(b)為行走箱帶動立柱和載車板行走到導軌最右端靠近道路側的位置;圖4(c)為回轉支承帶動立柱和載車板旋轉至道路上方與道路平行的位置;圖4(d)為載車板下降到道路上的位置。仿真運行結果表明:在上、下兩車位存取車輛時互不影響,實現了兩車位車輛的無避讓式存取,設計的停車裝置能滿足預期停車功能。
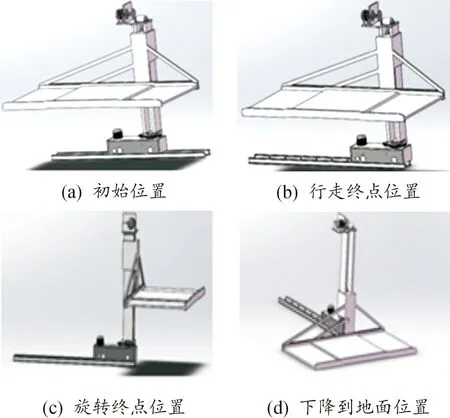
圖4 上車位運動仿真典型位置示意圖Fig.4 The diagram of upper parking space motion simulation
3 液壓系統設計
該液壓系統的最終目的是控制停車裝置的行走、旋轉和升降機構的運動,實現上車位車輛存取作業。液壓系統的硬件主要由液壓站( 包含液壓泵、伺服電機及附件等) 、液壓缸、液壓馬達及液壓控制閥組件等部分組成,本文中設計的液壓系統原理如圖5所示。
液位液溫計3用來檢測油箱中油位和油溫,為防止空氣進入油箱,設置有空氣過濾器23,溢流閥7用來限制系統的最高壓力,手動換向閥8為發生突然停電和檢修設置,吸油過濾器9兩端加壓力繼電器10用來檢測過濾器的通過情況是否堵塞。
車輛存取過程中液壓系統的工作過程為:車輛到達立體車庫待停位置,系統啟動電機4驅動液壓泵2,當YA通電時,電磁換向閥11切換至左位,行走液壓缸20無桿腔進油,液壓缸20活塞桿齒條伸出,通過齒輪傳動驅動行走箱沿導軌移動,帶動上車位載車板移動,直到活塞桿觸發限位開關XK,上車位載車板到達設定位置停止。YA通電,電磁換向閥12切換至左位,旋轉液壓缸21無桿腔進油,液壓缸21活塞桿齒條伸出,通過齒輪傳動驅動立柱旋轉,帶動上車位載車板轉動,直到活塞桿觸發限位開關XK,上車位載車板旋轉到達設定位置。液壓馬達22啟動,通過鋼絲繩帶動上車位載車板沿立柱下降,下降到達指定位置后液壓馬達停止,司機將車輛開上載車板,完成停車、下車、鎖車后,離開載車板。液壓電磁閥組10動作使升降液壓馬達反向旋轉,通過鋼絲繩拉動上車位載車板上升到指定位置后停止。YA通電,電磁換向閥12切換至右位,旋轉液壓缸21有桿腔進油,液壓缸21活塞桿齒條收縮,通過齒輪傳動驅動立柱旋轉復位,帶動上車位載車板轉動,直到活塞桿觸發限位開關XK,上車位載車板旋轉到達設定位置。電磁閥驅動旋轉液壓缸產生復位動作,帶動載車板旋轉復位。YA通電,電磁換向閥11切換至右位,行走液壓缸20有桿腔進油,活塞桿齒條收縮,通過齒輪傳動驅動行走箱沿導軌移動,帶動上車位載車板移動,直到活塞桿觸發限位開關XK,上車位載車板到達設定位置停止。完成存車過程,系統開始計費。
取車過程與存車過程類似,系統將載有車輛的載車板通過行走、旋轉、升降機構將車輛放到地面上,司機付費后直接將車開走,載車板自動完成復位動作即可。

1.油箱; 2.液壓泵; 3.液位液溫計; 4.電機; 5.單向閥; 6.壓力表; 7.溢流閥; 8.手動換向閥; 9.吸油過濾器; 10.壓力繼電器; 11、12、13.電磁換向閥; 14、15、16、17、18、19.單向節流閥; 20.行走液壓缸; 21.旋轉液壓缸; 22.升降液壓馬達; 23.空氣過濾器
4 控制系統設計
控制系統的主要控制對象是行走機構、旋轉機構和升降機構的運動,以及一些輔助裝置如指示燈和安全報警等。在兩個液壓缸的起點和終點位置分別設置限位傳感器裝置。傳感器直接將各機構的位置信號反饋到控制裝置,控制裝置接收到信號后對各執行元件發出相關命令,實現對車輛存取的自動控制。工作人員只需例行日常巡視檢查,發生故障后及時維修即可。
當前常用的控制系統有繼電器控制、單片機控制及PLC控制等,其中PLC具有抗干擾能力強,可靠性高、編程語言易學易懂、便于開發等優點,已廣泛應用于自動化生產領域。
本設計中選用PLC為控制核心,將車輛存取過程中的各種反饋信號通過PLC進行運算處理,控制電機、液壓缸、液壓馬達及電磁閥等的運行,實現車輛的自動存取功能,控制系統如圖6所示。
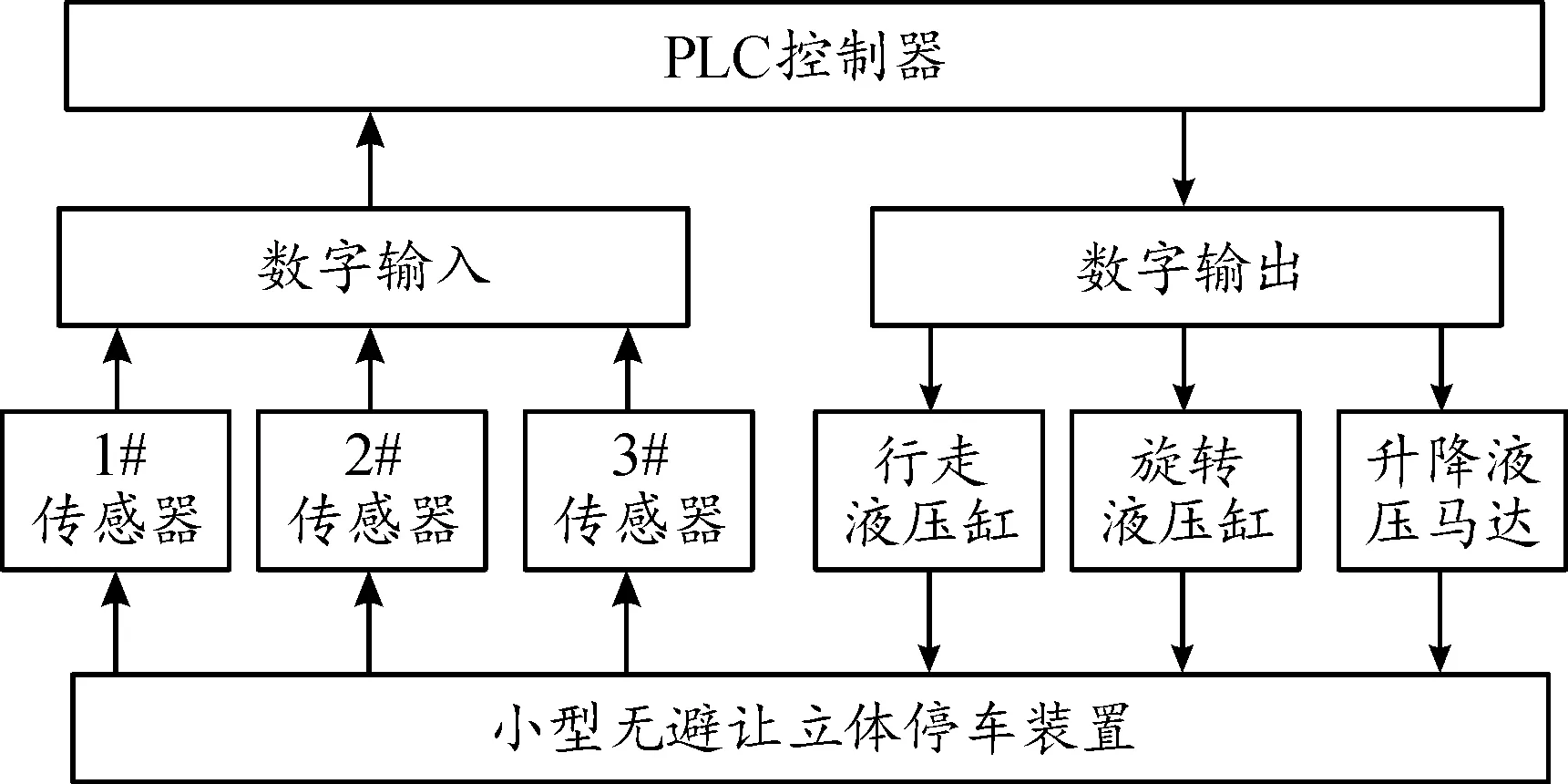
圖6 控制系統框圖Fig.6 The Control system diagram
4.1 硬件設計
本停車裝置需要14個輸入點,7個輸出點,選用三菱FX2-32M型PLC,繼電器型輸出、輸入點數各16個,該PLC采用繼電器輸出方式。由PLC處理采集到的數據,再控制各個電磁換向閥實現液壓執行元件的動作,完成車輛的存取工作,PLC的I/O地址分配如表1所示。
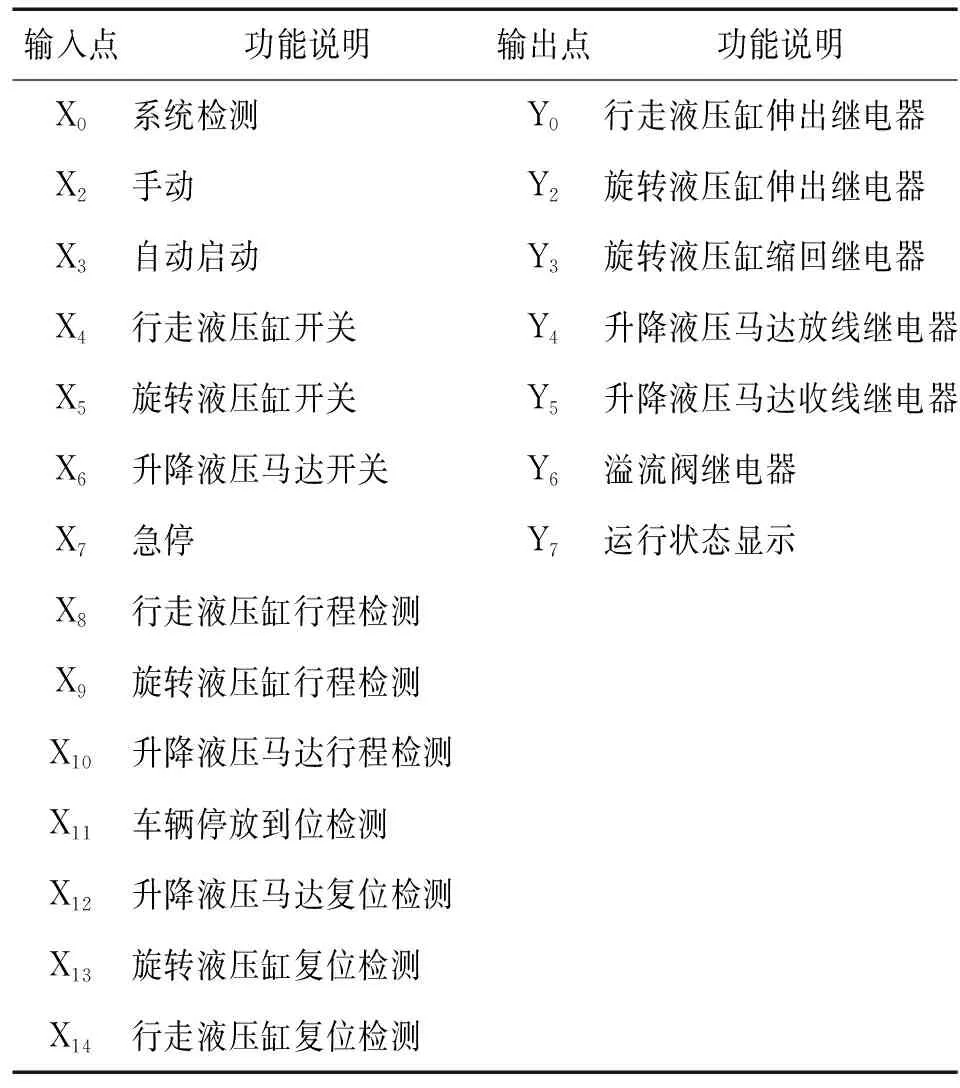
表1 PLC I/O地址分配Table 1 PLC I/O address assignment modulus
4.2 軟件設計
PLC程序采用梯形圖編寫,通過對停車裝置的工作任務進行分析,要求其前面的動作完成達到后續動作的運行條件時,才能開始下一步的動作,因此控制系統采用步進式的順序控制方式。控制流程如圖7所示。
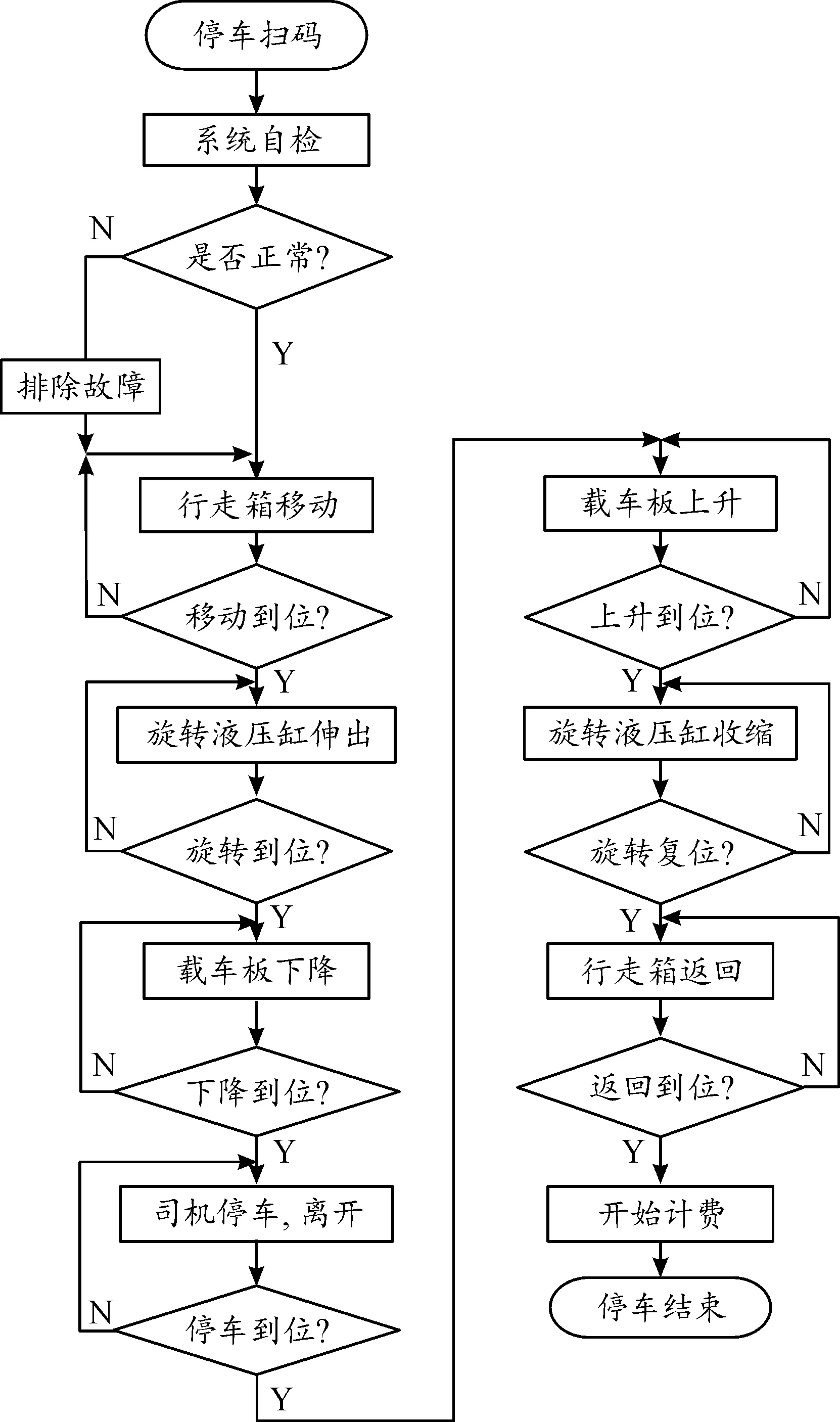
圖7 上車位停車控制系統流程框圖Fig.7 Flow chart of the upper space
5 結論
1) 針對當前停車難問題,采用機電、液壓傳動及自動控制技術,提出一種一位兩車無避讓立體停車裝置。
2) 能實現在一個地面車位的位置上停放兩輛車,提高土地利用率。
3) 設計的停車裝置采用液壓驅動,增加了車輛存取過程的平穩性,采用PLC控制實現了車輛存取的自動化控制,提高了車輛存取效率。
4) 仿真運動結果表明,設計的立體停車裝置上、下兩車位車輛的存取過程相互獨立,實現了無避讓停車,降低了司機停車時的駕車難度,減少了車輛發生剮、蹭等事故。
5) 該停車裝置可根據地面實際情況單臺安裝,也可多臺組裝,具有較好的市場應用前景。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
