速度未知的無人機群包圍及碰撞避免控制
2022-11-01 10:55:24鄭曉娟
兵器裝備工程學報 2022年10期
張 輝,鄭曉娟
(1.鹽城師范學院, 江蘇 鹽城 224000; 2.東北師范大學, 長春 130024)
1 引言
在過去的幾十年里,多智能系統分布式控制在許多工程實際應用領域獲得了很大的關注,如:機器人、智能電網、自主無人機等。無人機群系統的控制目標是在分布式傳感網絡、信息交互和智能計算的網絡環境中完成特定的任務,如:一致性任務、同步任務、協同控制等。
編隊控制是無人機群協同控制最活躍的研究課題之一,其目標是形成特定的運動模式或保持具有指定的相對位置和方向的編隊。編隊控制在護航、巡邏、救援、狩獵和多無人系統探測中的獲得了廣泛應用。而包圍編隊控制是所有無人機群都圍繞著單個或多個目標,這個被包圍的目標可以是靜止的也可以是運動的。針對靜止目標,文獻[12]設計了基于循環追蹤策略分布式包圍控制器,保證了所有的無人機收斂于期望的編隊結構并不發生碰撞情況;文獻[13]設計了基于無人機群相對方向的分布式控制器,完成了對靜止三維目標的包圍控制。近些年來,對于移動目標包圍控制的研究越來越多文獻,例如:文獻[14]采用梯度下降法設計了移動目標的多移動機器人系統包圍控制策略。文獻[15]設計了分布式在線路徑生成器,結合分布式系統控制器,解決了無人機群目標包圍控制。需要注意的是,上面的控制器設計都需要用到目標系統的速度。速度測量傳感器不僅增加了無人機系統的成本和重量,而且傳感器的精度也影響控制器的控制效果,因此嚴重限制了控制策略的工程應用范圍。為此,有必要研究包圍目標的速度未知的情況下完成期望的包圍任務。
針對定點和移動目標的無人機群包圍控制,現有的控制策略大多需要提前預設無人機群到包圍目標的期望距離,然而在實際應用中很難提前選擇合適的期望距離。本文研究目標速度未知的無人機群分布式包圍控制策略,通過引入防碰撞分量解決無人機群系統碰撞問題,并設計了自適應估計項來估計無人機群和包圍目標的速度。主要貢獻如下:
1) 設計一種新的基于相對位置的無人機群包圍控制策略;
2) 控制器的設計不需要預先設計無人機到目標的期望距離也不需要預先設計期望的無人機編隊拓撲結構;
3) 解決包圍過程中無人機群的碰撞問題;最后通過嚴格的Lyapunov方法證明了控制系統的穩定性,并通過Simulink仿真實驗驗證了控制器的有效性。
符號說明:和分別代表了實數和正實數,和×分別代表了×1階實數矩陣空間和×階實數矩陣空間,為矩陣的轉置符號,表示階的單位矩陣。‖·‖代表·的二階范數。
2 問題描述
2.1 無人機群系統
本文考慮如下的無人機群系統
(1)
式中:,,∈分別表示第個無人機的位置、速度和控制輸入,表示系統的維度,二維控制時=2,三維空間時=3,表示無人機的個數。
協同包圍控制目標的方程如下
(2)
式中:∈是包圍目標的位置,∈是包圍目標的速度。
包圍目標的速度無法測量,即在控制器設計中無法使用該物理量。
1包圍目標的速度∈具有上限,即存在正常數∈,使得‖‖≤。
在實際應用中,由于控制器的輸出量不是無限大的,所以包圍目標的速度必然無法達到無限大,所以此假設符合實際工程應用。
2.2 控制目標
為了說明無人機群的控制目標,首先介紹凸包集合的相關內容。
定義=()∈,則的凸包集合可以表示成

(3)

(4)

接下來介紹本文需要解決的2個主要問題:
2(碰撞避免):設計分布式控制器,使無人機群系統在包圍過程中不發生碰撞情況,即存在一個正數∈使得:?≥0滿足‖-‖>,其中≠∈。
為了控制器設計的方便,針對目標2做如下假設:
2在初始狀態下,即時刻,無人機群系統滿足‖()-()‖>的條件,其中≠∈。
假設2在實際的應用過程中可以不需要滿足,因為實際的控制器輸入存在上限,即在初始階段不滿足假設2的前提下,控制器會采用最大輸出量來避免碰撞。假設2的提出是為了后續控制器設計的方便和穩定性證明的便利。
3 分布式包圍控制器設計
無人機和無人機的相對位置定義為
=-∈
(5)
從上式易知:=-。
無人機到包圍目標的位置誤差定義為

(6)
無人機群系統到包圍目標的平均位置誤差定義為
(7)
為了使分布式控制器滿足目標2,設計如下的閾值函數

(8)
其中:為正常數,并且滿足>。
參考文獻[16]的思想,在控制器中加入如下的防碰撞分量
(9)
則分布式包圍控制器可以設計成如下形式


(10)

1針對二階無人機群系統(1)和帶有未知速度移的移動目標(2),控制器設計為(10),并且控制器參數滿足
->0
(11)

對式(7)求導可得
(12)
結合控制率(10),對上式繼續求導可得
(13)
(14)
對上式繼續求導可得

(15)
將式(10)代入上式得

(16)

由于
(17)
首先設計如下的Lyapunov函數



(18)




(19)
將式(10)代入式(19)中可得



(20)



(21)
2 針對二階無人機群系統(1)和帶有未知速度移的移動目標(2),控制器設計為(10),控制器的參數滿足不等式(10),則無人機群系統不會發生碰撞,即存在一個正數∈使得:?≥0滿足‖-‖≥。
根據Lyapunov方程(18)和其導數(21)可知

(22)

(23)
所以必然滿足<‖‖<。定理2證明完畢。
4 仿真研究
本小節通過二維無人機群包圍仿真實驗來證明本文提出的控制器的有效性。仿真軟件MATLAB 2016b和Simulink。
無人機群和包圍目標的方程為(1)和(2)。
目標的初始位置和速度分別為(0)=[10,20],=[2,2]。無人機群系統的初始位置為:
(0)=[10,10],(0)=[10,4]
(0)=[4,10],(0)=[4,4]
初始速度為:
(0)=(0)=(0)=(0)=[0,0]
控制器的參數和閾值函數的參數設計為
==3,=2,=5,=10
仿真結果如圖1—圖5所示。

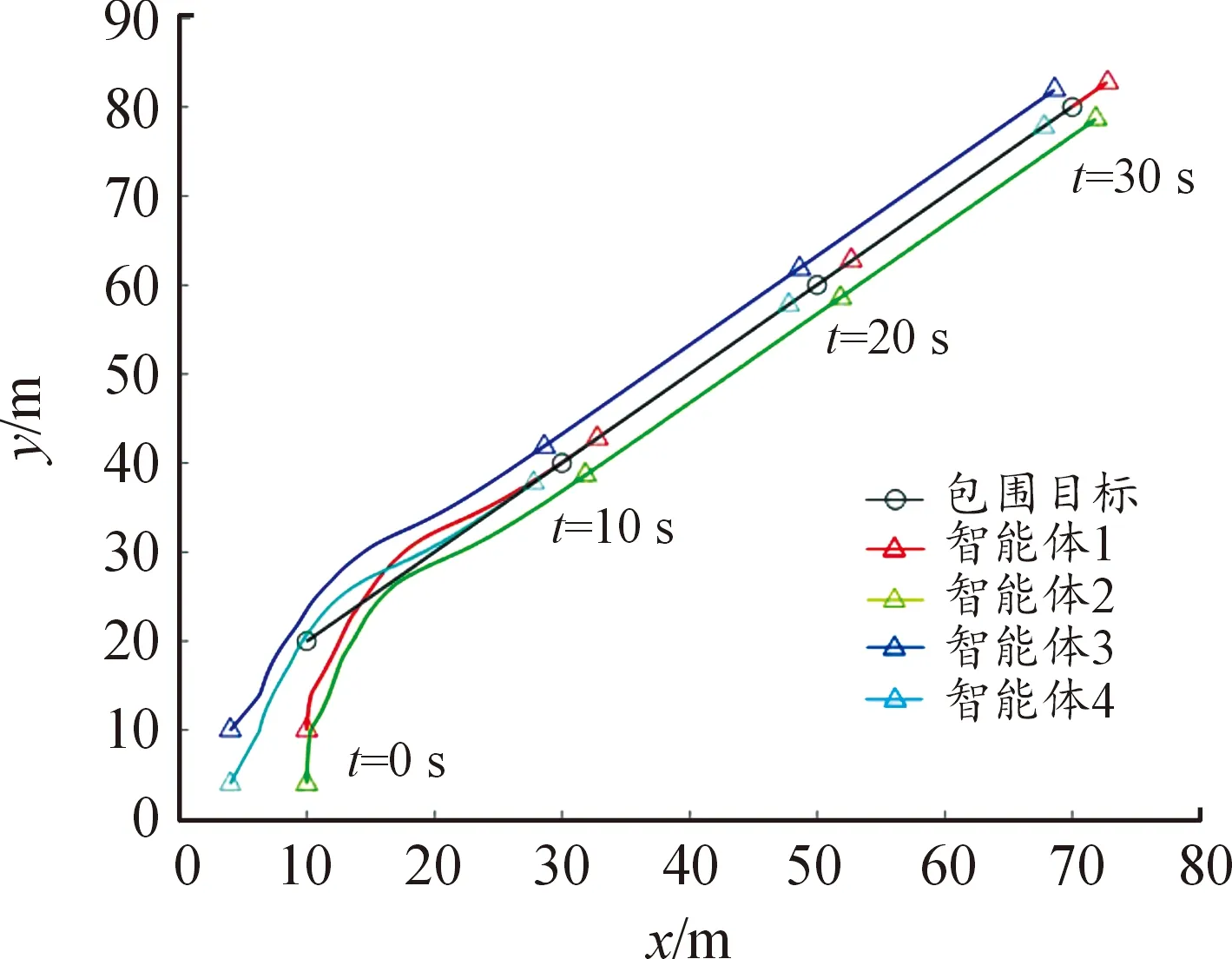
圖1 無人機群包圍目標效果曲線Fig.1 The fencing control effects of UAVs
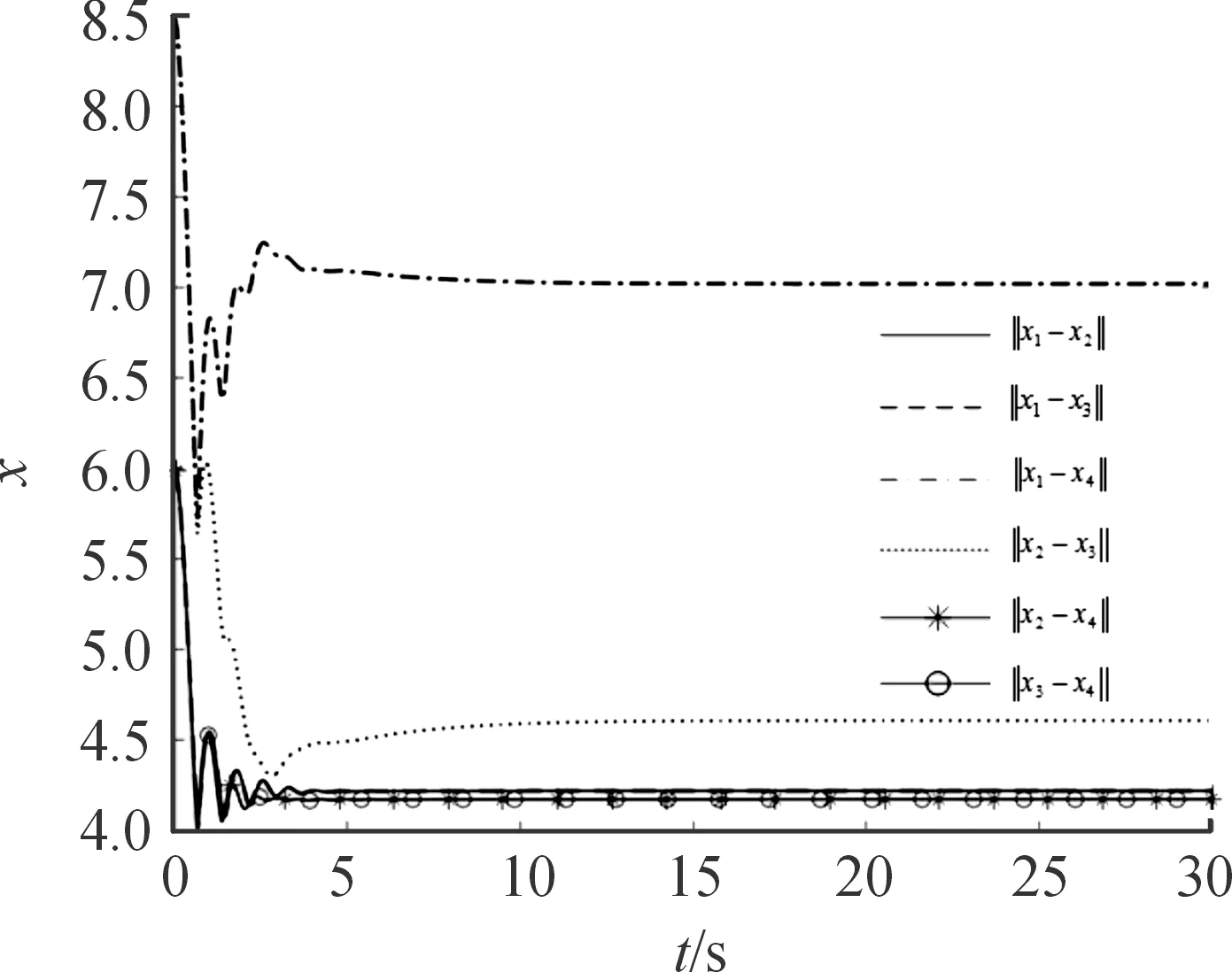
圖2 無人機群系統相對位置曲線Fig.2 The relative bearing of UAVs


圖3 無人機群到包圍目標的距離曲線Fig.3 The distance of UAVs to target
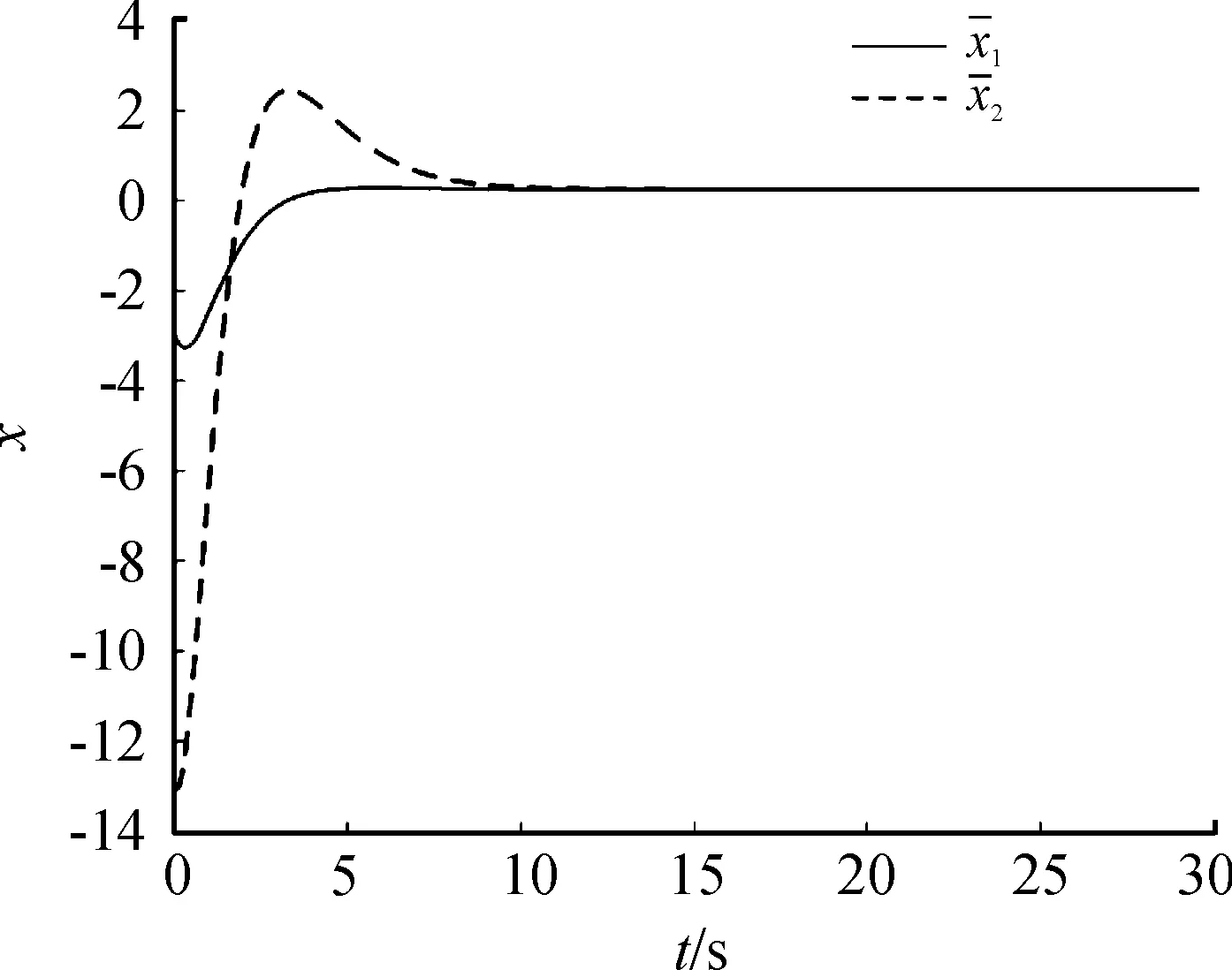
圖4 無人機群包圍系統的平均誤差和曲線Fig.4 The average of UAVs fencing systems
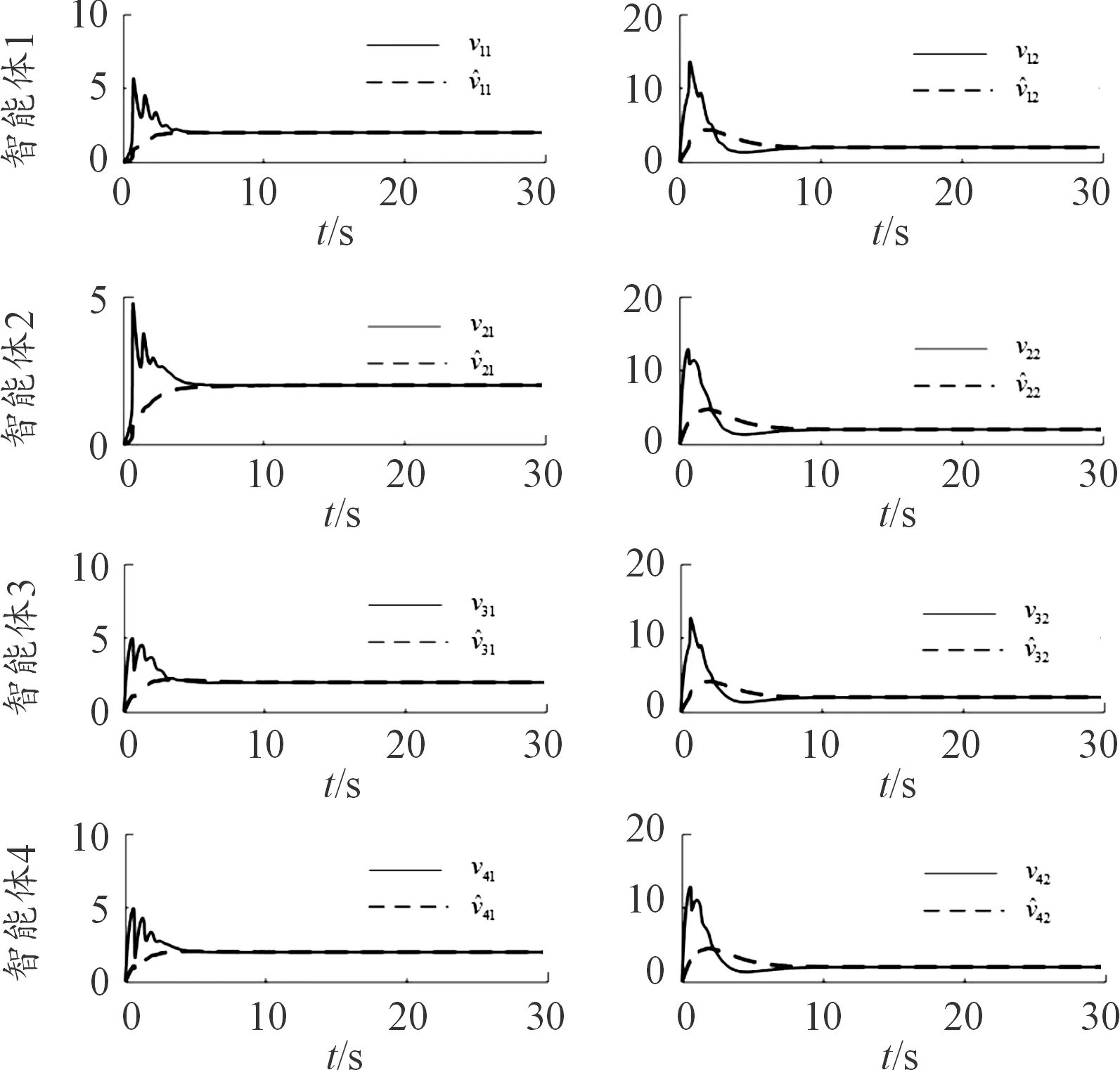
圖5 無人機群的速度vi和速度估計曲線Fig.5 The velocities vi and estimation velocities of UAVs
5 結論
基于無人機的相對位置設計分布式控制器,解決了包圍目標速度未知的二階無人機群的包圍控制問題。控制器的設計中加入了防碰撞分量,保證了無人機群系統不會產生碰撞,控制器不需預先設計無人機到目標的期望距離,也不需設計期望的無人機編隊拓撲結構,提高了控制方法的應用范圍。
后續研究應考慮將控制策略推廣到有向拓撲結構;針對復雜高階無人機群系統,設計包圍控制策略。
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
山東冶金(2019年3期)2019-07-10 00:54:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年10期)2018-08-20 02:57:02
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
