一種關節履帶復合式機器人動力結構設計與運動分析
2022-10-28 04:26:38聶朝瑞
機械工程與自動化 2022年5期
關鍵詞:結構
聶朝瑞,劉 淼
(1.陜西職業技術學院 汽車工程與通用航空學院,陜西 西安 710100;2.西安工業大學 機械學院,陜西 西安 710021 )
0 引言
特殊任務機器人通常具備較強的惡劣環境適應能力和戰場生存能力,仿生機器人也一直是各科技強國研究機構不斷研發的重點領域,而四足機器人因為具有更高的穩定性和更大的靈活性,一直是仿生機器人領域研究的焦點。
BigDog of Boston Dynamics掀起了各國研究機構對軍用四足仿生機器人的研究熱潮[1,2]。文獻[3]基于狗前腿的骨骼-肌肉生物力學特性,設計了一種可以實現奔跑的腿部結構并對其進行了動力學分析。文獻[4]提出了三種仿生腿結構并對其進行了特性分析,得到了混聯腿優于串聯腿的結論。文獻[5]提出了一種使用鉸鏈六連桿機構形式的履帶機器人結構,優化了傳統的履帶式結構,但整體結構相比較于傳統履帶機構并未有更進一步的提升。文獻[6]融合了輪式機器人和腿式機器人的特點,提出了一種輪腿交互變換的行走式機器人,但其整體實現策略更加復雜,導致系統冗余系數過高,對機器人處于真實環境中的可靠性和控制策略的耦合性提出了較大挑戰。文獻[7]設計了一種輪-履復合式的爬樓梯輪椅,其在結構上優化了輪子和履帶的功能優點,并通過ADAMS對其進行了運動學分析,得出了輪履復合結構能夠達到一定的行駛穩定性。文獻[8]針對固定履帶式運動機構越障性能差的問題,對雙擺臂機構履帶機器人在翻越障礙時的穩定性進行了研究,得出雙擺臂機器人對越障的可執行性和執行效率方面有較大的優勢。在機器人運動控制方式上,有使用DSP來對煤礦探測機器人進行控制的方式,也有使用Arduino硬件系統對輪式機器人的避障控制策略進行規劃,對所設計的機械動力系統在輪式運動狀態下的避障策略有一定借鑒作用[9,10]。
從以上的研究中可以看出,前人對四足機器人的結構設計和虛擬步態分析做出了較多的研究,然而大多數機器人本體結構較為復雜,增加了在真實環境中的控制難度和不可靠性因素。若在研究設計中將履帶動力單元與機器人主體框架徹底分離,可使其具備將仿生運動結構和對應的多元仿生控制策略融入傳統履帶式機器人的能力,從而提高機器人在面對多種地形環境時克服障礙的能力。
1 機器人主體結構設計及地形運動情況分析
機器人的動力結構大致可分為三種:輪式、履帶式和仿生爬行。輪式具有結構和控制簡單、平坦路面運行速度高、運動靈活和能耗較低的特點,但不適合跨越溝壑臺階等復雜地形及障礙。履帶式機器人相比輪式結構的機器人有較強的地形適應能力,在陡峭地形環境下有較強的地形適應能力,但同時存在較大的輪-履摩擦阻力,在遠距離或高速運動過程中能耗較高。仿生腿式機器人的優點是靈活性最高,但同時又有著較復雜的機械和傳動結構,且在控制硬件領域及運動算法上對機器人的控制和解耦合難度較大。
當前大多數陸地機器人在機械結構的設計方面基本是采用單一式結構,其機械結構一般為輪式、履帶式、仿生腿式。經過多種方案的優勢和劣勢對比,本文提出了一種仿生關節履帶復合型機器人,通過機器人多種功能的有機融合使其在面對不同地形環境時的適應性及通過能力得到有效提升。
以OXYZ為坐標軸給出了機器人腿部運動結構簡圖,如圖1所示。機器人由四組結構相同的運動單元構成,每個單元由大臂2、小臂1和驅動輪4構成,它們之間相互協調形成一組多運動形式的運動單元。每組運動單元具有三種不同型號行星減速無刷電機,其中安裝在主體上的大臂電機6用來驅動大臂的擺動及姿態保持;另外兩個電機集成在了行星減速齒輪傳動箱上,分別用來驅動履帶的運行和小臂的擺動,在機械傳動結構上二者的運動情況完全獨立。
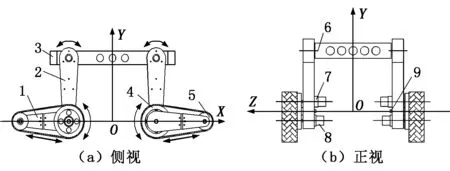
1-小臂;2-大臂;3-主框體;4-驅動輪;5-從動輪;6-大臂電機;7-小臂電機;8-履帶電機;9-角度傳感器
如圖1(b)所示,兩個電機7和8全部安裝在大臂和小臂的連接處,達到空間的合理緊湊和傳動效率的最大化,設計了行星齒輪機構保證兩個電機并行獨立工作且不發生干涉。為了能夠實現仿生步態運行,大臂和小臂均可正反向旋轉。硬件控制系統可以通過傳感器精確測量和控制旋轉角度及速度。由于采用了這種電機布置,機器人在以輪式和履帶形式運動時可以通過硬件和軟件形成分時四驅動力布局。
機器人腿部為四組并聯機構,每組運動機構有3個自由度:大臂的旋轉擺臂運動,小臂的旋轉運動和小臂履帶的旋轉運動。機器人每組運動機構的動力來源是3種不同齒輪減速比的行星減速無刷電機,由于受構成機器人本身和搭載設備的重量和尺寸限制,要求使用的電機必須具備特定的性能要求。控制大臂和小臂旋轉的電機需要體積緊湊和大扭矩,而履帶電機需要在特定扭矩情況下能達到較高的轉速,因此選擇結構緊湊且減速比大的無刷行星齒輪減速電機。由于空間尺寸的限制,相比傳統的蝸輪蝸桿傳動機構,行星齒輪減速電機的效率顯著提高,動力傳動損失小于10%。
2 機器人大臂-小臂行星齒輪傳動機構設計
小臂和履帶共同集成在一個部件上,為了小臂的擺動和履帶的運轉不發生機械干涉,在大臂和小臂的關節處設計了行星齒輪傳動機構,如圖2所示。小臂電機和履帶電機安裝在大臂,內齒環11安裝在內齒盤10上,內齒盤10又與小臂(圖中未示出)連接,小臂電機2通過齒輪3和內齒環11的行星輪機構驅動小臂擺動,履帶電機6通過一組減速齒輪驅動履帶驅動輪。通過這種設計,小臂的擺動和履帶驅動輪7的轉動可以獨立運動互不干涉,齒輪傳動機構全部被包含在了內齒盤內部,起到了對傳動機構的密封作用,此種設計也合理地利用了緊湊的空間。
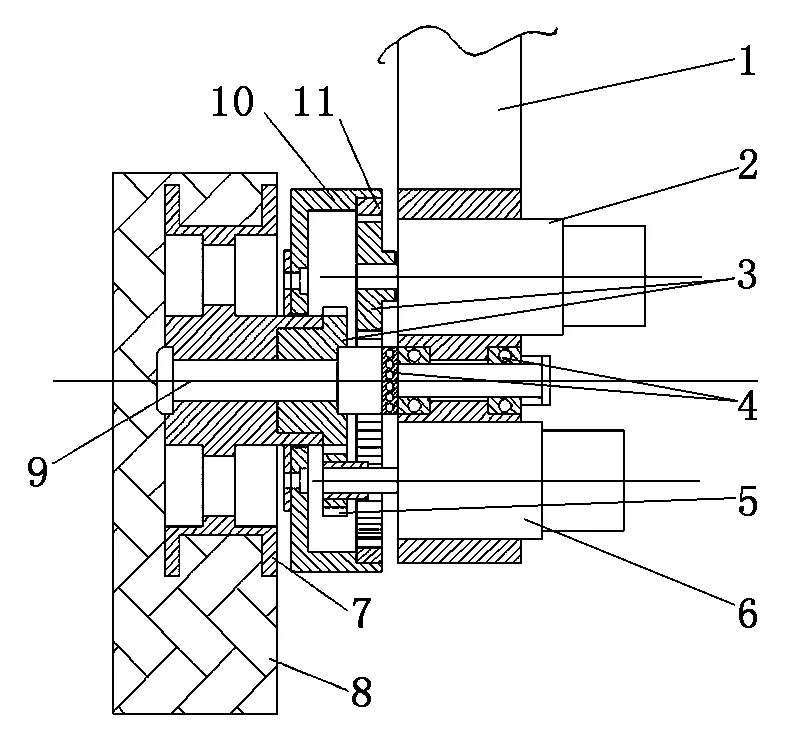
1-大臂;2-小臂驅動電機;3-傳動齒輪A;4-軸承;5-傳動齒輪B;6-履帶輪電機;7-履帶驅動輪;8-履帶;9-傳動主軸;10-內齒盤;11-內齒環
機器人在動力結構方面的設計為采用輪式運動結構、履帶運動結構和類四足靈長動物仿生臂結構的混合結構模式提供了可行性。
3 多向接觸力反饋感知履帶小臂復合機構設計及仿真
3.1 機器人小臂復合機構設計
機器人的小臂和履帶結合,使得小臂既可以在輪式和履帶狀況下運行,又能以四足仿生動物的步態模式行走。處于非仿生步態行走模式下的小臂可以固定在特定角度,機器人此時使用履帶模式運動。履帶小臂復合機構由內齒盤、內齒環、履帶驅動輪、剛性連接片、張緊調節連接塊、微形變材料和力傳感器組件組成。
在機器人核心驅動構件(即小臂傳動機構)中,機器人單獨一個小臂傳動機械結構簡圖如圖3所示。內齒盤5連接剛性連接片8,小臂電機驅動內齒盤5,可以使小臂轉動。履帶電機驅動中心齒輪,帶動履帶驅動輪4使履帶運動。履帶張緊調節孔9是調節履帶松緊的裝置,使用快速的螺栓壓緊機構使調節履帶松緊快速簡單。微形變結構3選用鎂鋁合金材料,設置在兩片剛性連接體之間,如圖4所示。微形變材料3中埋置有多路差動式壓電傳感器模塊,在機器人使用仿生步態運動過程中,機器人小臂的柔性足底1通過小臂微形變結構在不同方向上的重量分布及受力變化,實時測量和反饋小臂足底1在接觸地面時的受力情況,從而間接構成機器人單個腿部在運動過程中足底的受力閉環模型,為機器人步態運動算法提供實時數據支撐。
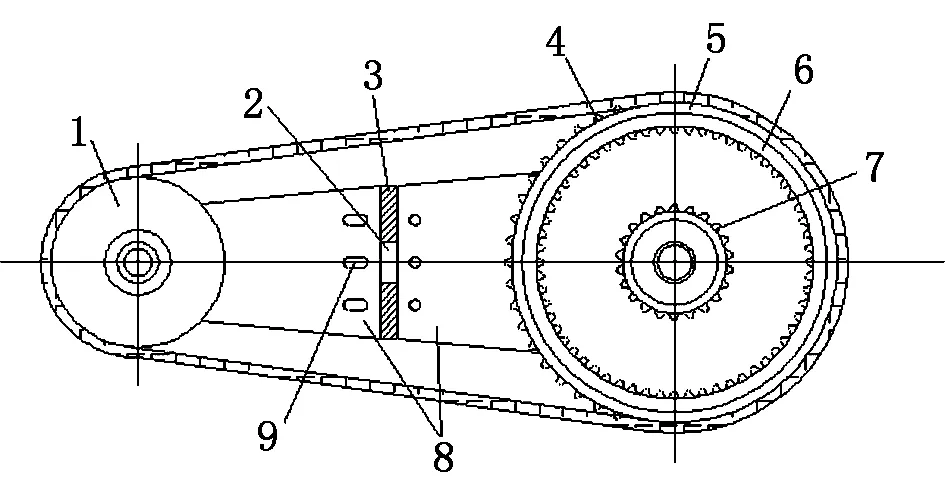
1-足型柔性從動輪;2-機械臂壓電傳感器組件;3-微形變結構材料;4-小臂履帶驅動輪;5-驅動輪內齒盤;6-鑲嵌在內齒盤中的內齒輪環;7-履帶驅動齒輪;8-履帶驅動輪的剛性連接片;9-履帶驅動臂的可調伸縮連接孔
3.2 機器人小臂連接件仿真優化
機器人小臂連接件作為機器人對運動行為進行外部力感知的一個重要傳感部件,此外還充當著對小臂柔性傳動輪和驅動輪的連接作用。在SolidWorks Simulation環境中對設計的機器人小臂連接件進行仿真及優化,最終形成如圖5所示的輕量化鋁合金小臂連接件。小臂連接件設計使用1060合金,屈服極限為27.57 MPa。經過仿真分析,得到小臂多向力反饋模塊的應力云圖和變形云圖,如圖6和圖7所示。由圖6和圖7可以看出:小臂連接件在100 N的給定壓力條件下,構件內部所承受的米塞斯靜屈服力在2.547 MPa范圍,遠小于設計連接件的屈服極限;同時連接模塊每個計算節點在外力載荷下相對原始位置的偏移量極限值為8.512×10-3mm,低于后期微小形變壓力傳感器的最大形變安全值。
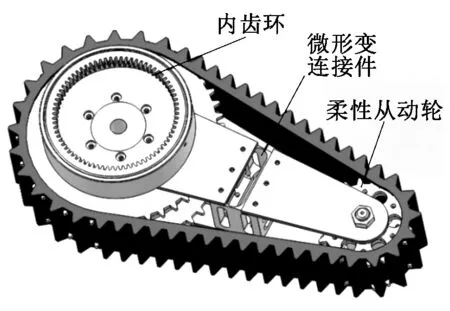
圖4 小臂傳動機械結構三維視圖
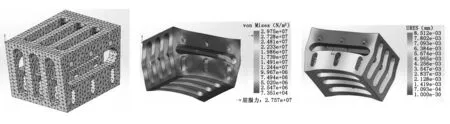
圖5 小臂多向力反饋模塊網格化模型 圖6 小臂多向力反饋模塊等效應力云圖(100 N 圖7 小臂多向力反饋模塊合位 )移云圖(100 N)
4 結論
本文研究設計了一種關節-履帶復合式機器人動力機構的機械傳動系統。這種傳動系統具有在平坦路面、泥濘地面和復雜崎嶇路面的路況下通過自適應判別方式達到不同形式的高效運行的基礎功能。通過虛擬仿真,結果表明機器人的機械傳動系統對平路、沙地、臺階及崎嶇路面等顯示出了較強的適應性和靈活性。研究設計的機器人動力結構和相適應的控制邏輯,為機器人在危險特殊路況環境中的探測、營救和施工作業帶來一些新的結構設計方法和思路。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
