3-SPS/SP并聯機構的設計仿真分析及應用
2022-10-28 04:26:38符克偉周毅鈞
機械工程與自動化 2022年5期
符克偉,周毅鈞,薛 興
(安徽理工大學 機械工程學院,安徽 淮南 232001)
0 引言
現代社會桶狀物的商品有許多,以自來水水桶為例,絕大部分水桶的商標是用膠布或貼紙的方式粘上去,或是通過絲印的方式印上去。這些方式雖然也能達到預期的效果,但是相對來說效率較低,商標套準的精準度較差,不適用于大批量的加工應用。為解決上述問題,提出了一種3-SPS/SP并聯機構,將3-SPS/SP并聯機構應用于桶狀物體表面商標噴涂裝置。本文基于螺旋理論求解了3-SPS/SP并聯機構的自由度,采用ADAMS軟件進行運動學仿真,通過MATLAB軟件獲取該并聯機構的可達工作空間,并以一個在桶狀物體表面進行商標噴涂為實例,對該并聯機構進行了仿真分析。
1 3-SPS/SP并聯機構模型建立及自由度分析
圖1為3-SPS/SP并聯機構三維模型,它主要由靜平臺、動平臺以及4條支鏈組成,其中3條支鏈的結構相同,均為SPS,另一條支鏈結構為SP。四條支鏈的球副(S11、S21、S31、S41)分別與動平臺相連,中間位置均由兩條連桿組成移動副(P12、P22、P32、P42),上端是由3條SPS支鏈的另一個球副(S13、S23、S33)與靜平臺相連,SP支鏈則是由連桿的上端直接與靜平臺相連,整個機構的驅動副為連桿所組成的4個移動副。
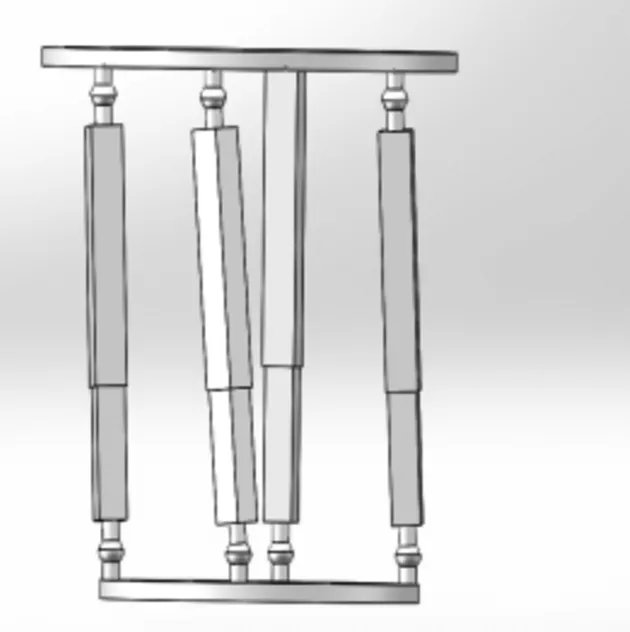
圖1 3-SPS/SP并聯機構三維模型
在動平臺和靜平臺的中心分別創建動坐標系O-XYZ和靜坐標系P-UVW,如圖2所示。與動平臺相連的4個球副的中心點為Ai(i=1,2,3,4),與靜平臺相連的3個球副的中心點為Bi(i=1,2,3),SP支鏈的連桿與靜平臺相連的位置中心點為B4。Ai與Bi分別相連所組成的圖形均為正方形,設OA1=a,則Ai點的坐標分別為A1(a,0,0)、A2(0,a,0)、A3(-a,0,0)、A4(0,-a,0);Bi點的坐標分別為B1(XB1,YB1,ZB1)、B2(XB2,YB2,ZB2)、B3(XB3,YB3,ZB3)、B4(XB4,YB4,ZB4)。
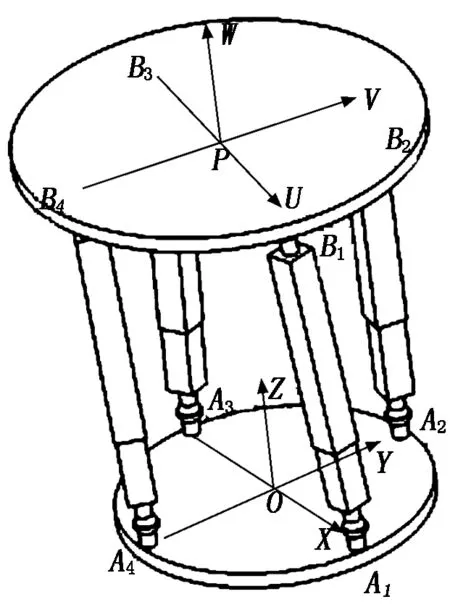
圖2 創建動平臺和靜平臺的坐標系
并聯機構中3條SPS支鏈對動平臺不產生約束作用,因此機構的約束螺旋僅由SP支鏈提供。在動坐標系O-XYZ中,SP支鏈的運動螺旋系表示為:
(1)
其中:d、m、n分別為移動副P42在運動副軸線上的方向余弦。
通過計算可以得出SP支鏈的約束螺旋為:
$1=(1,0,0;0,-d/m,a).
(2)
$2=(0,1,0;-a,0,-n/m).
(3)
式(2)的約束螺旋是一個平行于X軸的力線矢,約束了X軸方向的平移。式(3)的約束螺旋是一個平行于Y軸的力線矢,約束了Y軸方向的平移。
根據螺旋理論得出該機構擁有4個自由度,分別是繞X軸、Y軸、Z軸的轉動以及沿Z軸的移動。
2 機構的位置逆解
給出動、靜平臺在空間的位置和姿態,求各桿長即各移動副的位移,這就是機構的位置逆解,針對該機構就是求解4個移動副的驅動位移l1、l2、l3、l4。將與靜平臺和動平臺相連接的8個運動副的中心點分別連接構成兩個正方形,其邊長分別為2l和2L。圖2中,Ai和Bi(i=1,2,3,4)的坐標可以表示為:
A1=(L,0,0)T,A2=(0,L,0)T,
A3=(-L,0,0)T,A4=(0,-L,0)T.
B1=(l,0,0)T,B2=(0,l,0)T,
B3=(-l,0,0)T,B4=(0,-l,0)T.
通過公式(4)運用坐標變換的方法將動坐標系中的各點變換到靜坐標系中去,即:
(4)

其中:[T]為靜平臺位姿的方向余弦矩陣;s表示sin;c表示cos;α、γ、β分別為并聯機構繞X軸、Y軸和Z軸的轉動角度;Tqj分別表示方向余弦矩陣中的每一項,q表示行數,j表示列數;P為動坐標系的原點在靜坐標系中的坐標,P=[XPYPZP]T。
各支鏈的驅動桿長可通過公式(5)求得:
(5)

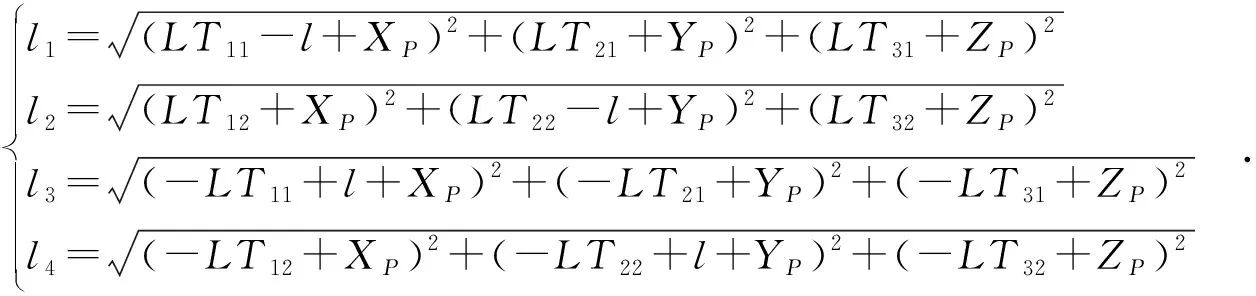
(6)
3 機構的運動學仿真分析
將并聯機構模型導入到ADAMS軟件中,設置機構的材料屬性,并建立機構所需要的約束,添加運動副。在ADAMS中給靜平臺添加固定副使其固定,再分別給相應的運動副添加移動副和球副等,在對應的運動副上添加驅動函數20*sin(0.5*time),然后進行仿真。
3.1 正解仿真
并聯機構的正解計算都十分復雜,有些甚至不能通過計算得到結果,所以大多數情況都是用仿真來求解。用ADAMS軟件對并聯機構進行仿真,運行結束后選擇動平臺為研究對象,得到動平臺在空間中的速度仿真曲線,如圖3所示。
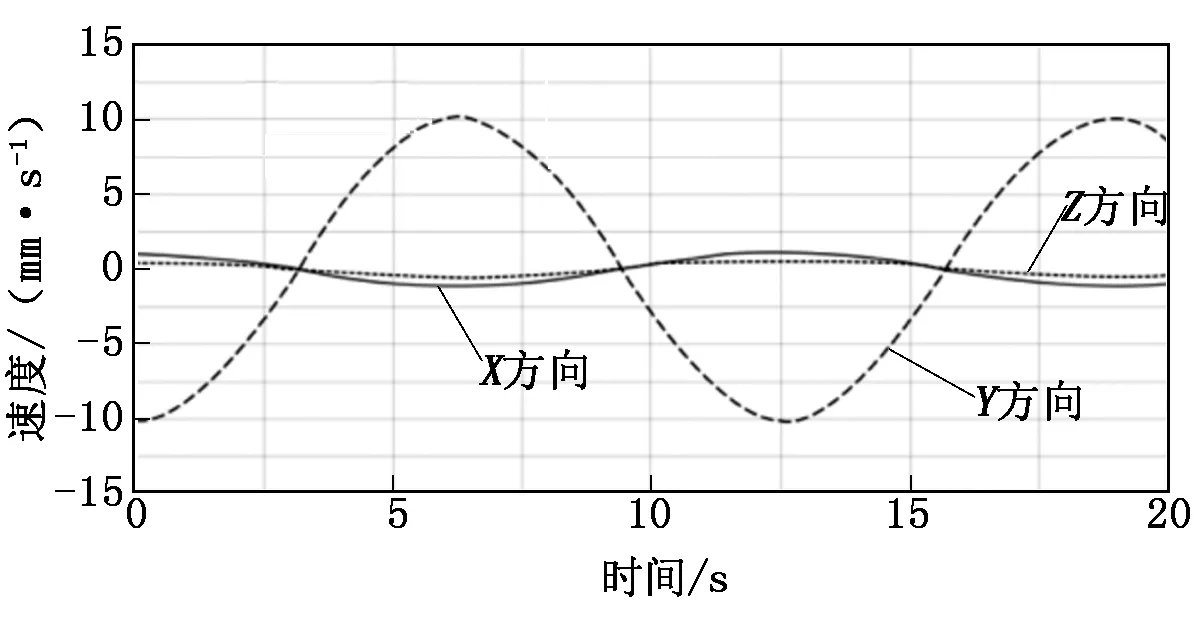
圖3 正解仿真得到的動平臺速度曲線
由圖3可知,動平臺只有在Y軸方向上速度有較大的變化,X軸和Z軸方向上都趨于穩定。
3.2 逆解仿真
在并聯機構4條支鏈的移動副處添加驅動函數。在SP支鏈的移動副添加驅動函數10*sin(0.5*time),在3條SPS支鏈的移動副添加驅動函數5*sin(0.5*time)。
選擇動平臺中心點為驅動點在ADAMS中進行仿真運算。運算完成后,得到動平臺在空間中的速度仿真曲線,如圖4所示。
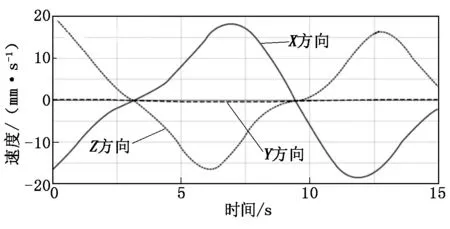
圖4 逆解仿真得到的動平臺速度曲線
總體來看,動平臺的速度變化曲線連續光滑,未發生明顯的突變且無斷點,表明該機構能夠平穩運行。通過仿真分析可以看出,3-SPS/SP并聯機構的運動性能良好。
4 機構的可達工作空間分析
設定3-SPS/SP并聯機構的結構參數為:圓形動、靜平臺的半徑分別為r=50 mm、R=65 mm;4條支鏈的初始桿長均為70 mm,所能達到的最大桿長均為140 mm。將設定好的數值代入到MATLAB編好的程序中,通過MATLAB的運行獲得可達工作空間,并將可達工作空間轉化為3個坐標平面的平面圖,如圖5所示。
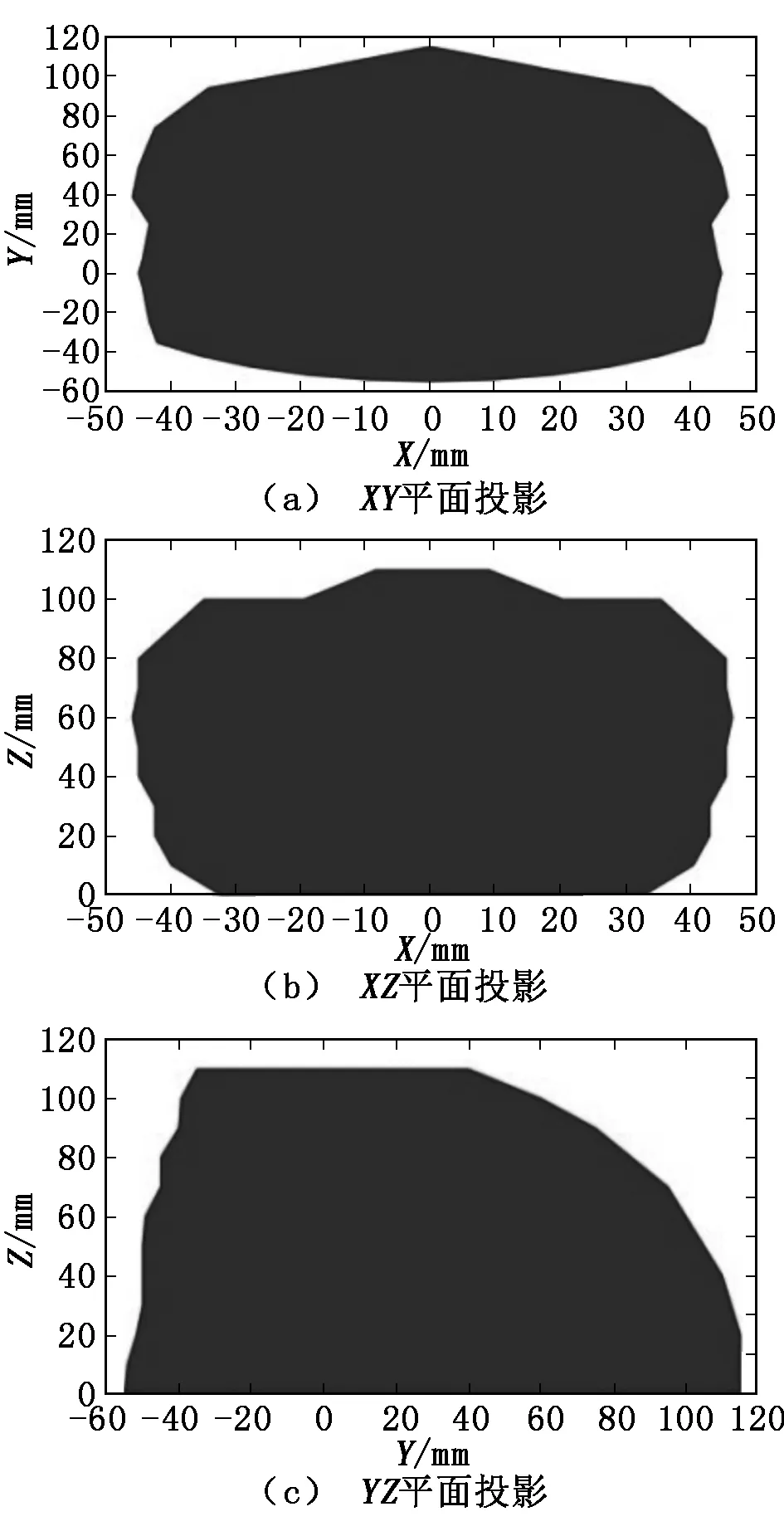
圖5 平聯機構的工作空間平面圖
從圖5中可以看出,并聯機構在3個平面內的工作空間都比較大,且工作空間沒有空洞,形狀比較規則,說明并聯機構的工作空間良好。
5 實例分析
將基于3-SPS/SP并聯機構所設計的噴漆裝置應用于桶狀物體表面的商標噴涂,可以很好地提高工作效率。該設備由3-SPS/SP并聯機構、傳送平臺(用于將需要噴涂的桶狀物運輸到固定位置)、噴涂裝置(安裝在動平臺底部中心)以及支撐裝置(用于固定并聯機構)組成。在并聯機構的4條支鏈上分別安裝電機來作為整個裝置的驅動,通過4條支鏈的運動帶動動平臺運動,進而使得噴漆裝置能夠實現在工作空間內的噴漆工作。通過中間移動副的同時移動來調整動平臺在Z軸方向上的位置,當需要在偏左或者偏右的位置進行噴漆時,只需要通過調整移動副來改變動平臺的角度,例如需要在偏左的位置噴漆時,將右側支鏈伸長,使動平臺向左側傾斜達到所需要的角度。
通過在桶狀物表面噴刻文字的仿真來驗證該機構可以完成在桶狀物表面進行噴漆的工作。在自來水水桶表面上噴刻“順廣泉水,訂水電話******”幾個字的仿真圖如圖6所示。表明該機構在實現桶狀物表面商標的噴涂上完全具有可行性。
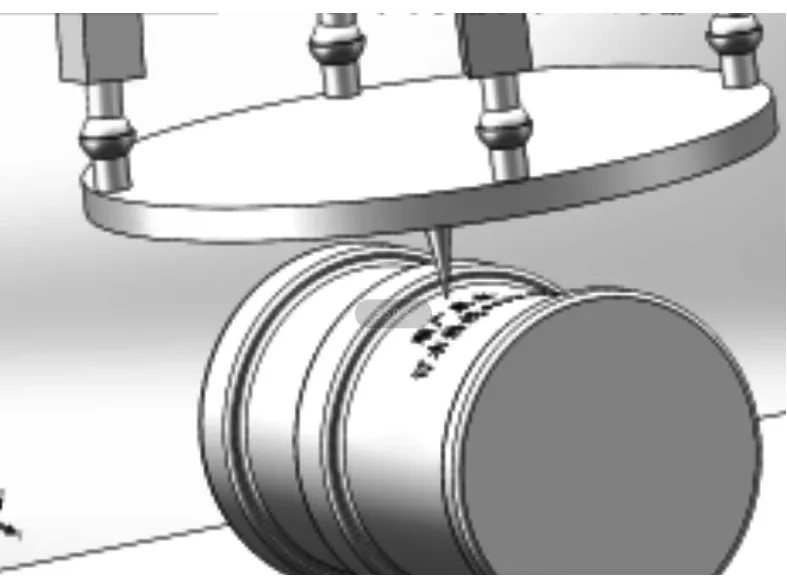
圖6 實例仿真圖
