某型水下航行體北斗狀態(tài)監(jiān)控方法與程序?qū)崿F(xiàn)
2022-10-28 13:42:24張慶國
電子設(shè)計(jì)工程 2022年20期
關(guān)鍵詞:信息
張慶國
(昆明船舶設(shè)備研究試驗(yàn)中心,云南昆明 650051)
水下航行體/平臺的中近程通信多為水聲、光電或電磁等方式[1-2],但遠(yuǎn)程通信常依賴衛(wèi)星定位導(dǎo)航系統(tǒng),如我國自主研發(fā)的北斗衛(wèi)星導(dǎo)航系統(tǒng)。北斗衛(wèi)星導(dǎo)航系統(tǒng)在水下航行體/平臺以及多種水下武器裝備上應(yīng)用極為廣泛,發(fā)揮著重要作用,產(chǎn)生了顯著的經(jīng)濟(jì)和社會效應(yīng)[3]。在海上實(shí)際使用過程中,如航行體在浮起點(diǎn)規(guī)定時(shí)間內(nèi)未能通過北斗衛(wèi)星導(dǎo)航系統(tǒng)進(jìn)行有效定位和通信,則可能會造成航行體在海上丟失或損傷,亦無法對其后續(xù)工作流程進(jìn)行遠(yuǎn)程操控。因此,水下航行體的內(nèi)部北斗工作狀態(tài)直接影響其性能指標(biāo)的實(shí)現(xiàn),甚至成為該水下航行體主要功能及戰(zhàn)技指標(biāo)是否實(shí)現(xiàn)的關(guān)鍵點(diǎn)。
航行體在水下航行時(shí),用于衛(wèi)星導(dǎo)航通信的天線將被海水淹沒,無線信號被屏蔽。因此,通常只在航行體浮出水面或利用水面浮標(biāo)等方式短時(shí)間內(nèi)完成信息傳遞[4-5]。即使北斗天線采用折疊或伸縮結(jié)構(gòu),在一定程度上可解決天線產(chǎn)生的航行阻力與無線通信效果之間的矛盾問題,但天線在水面伸出高度依然較低,距離水面較近。可見,水下航行體利用北斗衛(wèi)星進(jìn)行通信定位時(shí),天線基本位于水面附近,天線隨著水面浪涌擺動姿態(tài)很難準(zhǔn)確控制[6]。同時(shí),航行體北斗接收信號還受水面反射雜波等眾多不利因素干擾[7]。另外,常規(guī)水下航行體內(nèi)部空間、功耗均有一定限制,特別是航行體內(nèi)部采用電池供電方案時(shí),需著重考慮水下航行體的航程、航速等總體要求,即其內(nèi)部電子系統(tǒng)的功耗應(yīng)為小尺寸、低功耗,不能影響總體性能指標(biāo)的實(shí)現(xiàn)。
綜上所述,水下航行體的內(nèi)部北斗工作狀態(tài)對其安全性和可靠性影響極大,甚至對其功能和性能造成較大影響。北斗衛(wèi)星導(dǎo)航方式在水下航行體式應(yīng)用環(huán)境下,很難在規(guī)定時(shí)間內(nèi)實(shí)現(xiàn)實(shí)時(shí)、精確且及時(shí)可靠的通信和定位。因此,有必要在航行體內(nèi)對北斗工作狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測,并在適當(dāng)情況下進(jìn)行介入性操控,以提高水下航行體的實(shí)航可靠性和安全性。
1 監(jiān)控方案
北斗衛(wèi)星導(dǎo)航系統(tǒng)是我國自主研發(fā),可以覆蓋我國及周邊部分地區(qū)的全天候衛(wèi)星導(dǎo)航系統(tǒng)。其基本定位原理是根據(jù)全球衛(wèi)星導(dǎo)航系統(tǒng)(Global Navigation Satellite System,GNSS)接收機(jī)接收的同步衛(wèi)星發(fā)送的衛(wèi)星信息進(jìn)行時(shí)間對標(biāo)。然后解算衛(wèi)星偽距并利用空間幾何距離交會,實(shí)現(xiàn)對接收機(jī)的定位[8-9]。
“北斗一代”導(dǎo)航衛(wèi)星由位于赤道上空的兩顆地球靜止衛(wèi)星(東經(jīng)80°和140°)、一顆在軌備份衛(wèi)星(東經(jīng)110.5°)組成,衛(wèi)星軌道高度約為2 萬千米[10],覆蓋范圍是北緯5°~55°、東經(jīng)70°~140°之間的區(qū)域,最寬處在北緯35°左右,基本工作原理如圖1 所示。

圖1 北斗衛(wèi)星導(dǎo)航系統(tǒng)工作原理示意圖
“北斗一代”基本工作過程是,北斗用戶終端通過北斗導(dǎo)航衛(wèi)星向地面控制中心提出定位申請或通信申請,地面控制中心接收到服務(wù)申請后進(jìn)行相應(yīng)的處理,并將處理結(jié)果通過北斗導(dǎo)航衛(wèi)星發(fā)送給北斗用戶終端,從而實(shí)現(xiàn)相應(yīng)的通信、定位功能。為了更好理解該方法和程序設(shè)計(jì)環(huán)境,給出某型水下航行體內(nèi)部北斗結(jié)構(gòu)框圖,如圖2 所示。
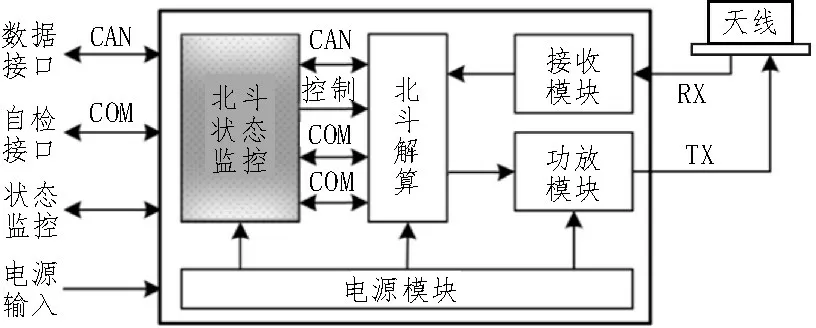
圖2 某水下航行體內(nèi)部北斗結(jié)構(gòu)框圖
如圖2 所示,北斗狀態(tài)監(jiān)控方法與程序?qū)?yīng)接口較多,按照功能可分為供電接口和通信接口兩種。供電接口主要為水下航行體提供穩(wěn)壓直流供電電源;通信接口主要為控制器局域網(wǎng)絡(luò)(Controller Area Network,CAN)、串口(如RS-232、RS-485 等)等[11-12]。其中,自檢接口及狀態(tài)監(jiān)控接口為文中方法預(yù)留的查詢及調(diào)試接口,如試后讀取內(nèi)部記錄信息等。
2 程序設(shè)計(jì)
程序需獨(dú)立對航行體內(nèi)部北斗狀態(tài)進(jìn)行實(shí)時(shí)連續(xù)監(jiān)測,并依據(jù)相關(guān)判斷準(zhǔn)則進(jìn)行數(shù)據(jù)解算和預(yù)測。當(dāng)判斷北斗工作狀態(tài)出現(xiàn)異常情況時(shí),進(jìn)行臨時(shí)性介入操控,如單獨(dú)對總線上的北斗進(jìn)行重置復(fù)位、指令初始化以及單次通信或定位申請控制等操作。
為了進(jìn)一步簡化硬件結(jié)構(gòu)尺寸和功耗,在程序設(shè)計(jì)中除了常規(guī)進(jìn)行選擇性休眠外,采用軟件方式進(jìn)行部分通信監(jiān)視接口的模擬實(shí)現(xiàn)。具體采用軟件模擬通用異步收發(fā)傳輸器(Universal Asynchronous Receiver and Transmitter,UART)方法實(shí)現(xiàn)常規(guī)通信功能[13-14],該方法可在節(jié)省硬件資源和處理器帶寬的前提下,模擬硬件UART 的功能。
2.1 程序框架及流程
程序主要負(fù)責(zé)對某型水下航行體北斗狀態(tài)數(shù)據(jù)進(jìn)行實(shí)時(shí)解算,并對自身硬件平臺工作參數(shù)進(jìn)行實(shí)時(shí)監(jiān)測,綜合上述測量信息進(jìn)行北斗狀態(tài)的綜合評價(jià)。當(dāng)滿足判斷條件時(shí),對北斗處理器進(jìn)行干預(yù)處理。程序組成與接口如圖3 所示。
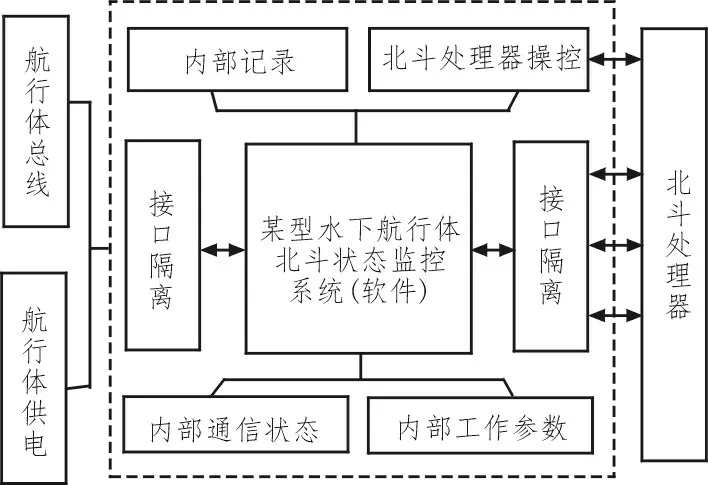
圖3 程序組成與接口示意圖
如圖3 所示,虛線框內(nèi)為監(jiān)控軟件對應(yīng)部分。該軟件主要接口有三種,分別對應(yīng)不同的監(jiān)控功能:1)內(nèi)部工作狀態(tài)測量接口,如內(nèi)部工作電壓、電流、通信狀態(tài)以及內(nèi)部記錄存儲等;2)航行體總線接口,如CAN、供電等;3)北斗處理器接口,如CAN、RS-232等。程序主要處理步驟如下:
1)監(jiān)控軟件初始化,含嵌入式處理器內(nèi)部串口、軟件UART、AD 采樣、外部中斷等;
2)對北斗卡信息進(jìn)行實(shí)時(shí)解算與存儲。按照約定解密算法進(jìn)行信息包拆解,獲得北斗卡當(dāng)前接收到的正確信息包,信息包實(shí)時(shí)存儲后,經(jīng)相應(yīng)計(jì)算獲得北斗處理器控制所需信息包;
3)規(guī)定動作執(zhí)行,如硬件負(fù)載開關(guān)默認(rèn)打開,發(fā)送北斗處理器初始化指令信息等;
4)實(shí)時(shí)監(jiān)控總線及接口信息,進(jìn)行實(shí)時(shí)解算和判斷。根據(jù)總線信息對當(dāng)前點(diǎn)位的北斗衛(wèi)星狀態(tài)進(jìn)行預(yù)先解算,并對北斗處理器的原始輸出接口進(jìn)行定時(shí)監(jiān)測;
5)對北斗處理器進(jìn)行實(shí)時(shí)介入性操控,如北斗處理器長時(shí)間(如10 s 以上)輸出信息不正常,則對北斗處理器進(jìn)行操控;
6)試后查詢及調(diào)試等功能,如試后可按約定加密指令,實(shí)現(xiàn)單獨(dú)調(diào)試或內(nèi)部Flash記錄信息讀取等。
監(jiān)控程序軟件流程如圖4 所示。

圖4 監(jiān)控程序軟件流程圖
如圖4 所示,t和T分別為與北斗工作相關(guān)的時(shí)間參數(shù),通常以秒為單位。其中,F(xiàn)lash 內(nèi)部區(qū)塊檢查及標(biāo)記是為了通過校驗(yàn)的方式,確保每次工作前明確獲得用于內(nèi)部信息記錄的Flash 狀態(tài),防止偶發(fā)性Flash 內(nèi)部個(gè)別“壞點(diǎn)”造成記錄數(shù)據(jù)錯(cuò)誤或失效[15]。記錄信息1 主要是當(dāng)前時(shí)間、北斗工作電壓、電流以及衛(wèi)星定位經(jīng)緯度、波束等信息。記錄信息2 主要是當(dāng)前時(shí)間、北斗處理器瞬間工作電流、當(dāng)前接收點(diǎn)衛(wèi)星波束以及介入性操控次數(shù)等信息。
2.2 通信口的軟件模擬設(shè)計(jì)
硬件UART 通過連接處理并行對北斗處理器的串口發(fā)送及接收端進(jìn)行監(jiān)測和控制,軟件UART 并聯(lián)在北斗處理器的串口發(fā)送端上,進(jìn)行當(dāng)前并行串口數(shù)據(jù)監(jiān)測,避免并行發(fā)送數(shù)據(jù)造成數(shù)據(jù)紊亂,導(dǎo)致故障報(bào)錯(cuò)。軟件模擬UART 主要是為了降低硬件復(fù)雜度,同時(shí)降低整體功耗,利用通用I/O 口模擬串口對航行體北斗串口進(jìn)行監(jiān)測。
軟件UART 設(shè)計(jì)需要在硬件占用和速度/效率之間權(quán)衡,使用較多硬件的設(shè)計(jì)可能消耗較小的處理器帶寬并允許較高的位速率。常規(guī)設(shè)計(jì)中多采用定時(shí)器方式,雖然定時(shí)器帶有自動重載功能,可減少軟件開銷并降低或消除中斷延遲問題,但軟件控制需考慮隨機(jī)的中斷延遲帶來的累加問題。結(jié)合硬件平臺實(shí)際情況進(jìn)行綜合考慮,文中主要利用嵌入式硬件內(nèi)部可編程計(jì)數(shù)器陣列(Programmable Counter Array,PCA)來實(shí)現(xiàn)軟件UART。軟件模擬UART 主要軟件流程如圖5 所示。
如圖5 所示,UART 的接收和發(fā)送均采用中斷方式,需要注意的是,接收中斷對時(shí)間要求較高,即對時(shí)間延遲比較敏感。因此,軟件UART 的接收中斷需要較高優(yōu)先級。

圖5 軟件模擬UART軟件流程圖
3 試驗(yàn)測試
依據(jù)國家標(biāo)準(zhǔn)GB/T25000.51-2016《系統(tǒng)與軟件工程系統(tǒng)與軟件質(zhì)量要求和評價(jià)(SQuaRE)第51 部分:就緒可用軟件產(chǎn)品(RUSP)的質(zhì)量要求和測試細(xì)則》,對軟件功能性和可靠性程度進(jìn)行第三方測試。測試通過后,利用標(biāo)準(zhǔn)測試設(shè)備對運(yùn)行該監(jiān)控軟件的系統(tǒng)進(jìn)行試驗(yàn)測試,具體為環(huán)境試驗(yàn)和電磁兼容性試驗(yàn)。
3.1 環(huán)境試驗(yàn)
環(huán)境試驗(yàn)測試主要依據(jù)國內(nèi)某型號水下航行體的專用環(huán)境試驗(yàn)要求,進(jìn)行綜合環(huán)境試驗(yàn)測試。供電采用標(biāo)準(zhǔn)穩(wěn)壓電源,接口均為通用標(biāo)準(zhǔn)通信接口,模擬航行體北斗工作狀態(tài)數(shù)據(jù),定時(shí)發(fā)送至該監(jiān)控系統(tǒng)。具體環(huán)境試驗(yàn)項(xiàng)目涉及低溫、溫度變化、濕熱、沖擊以及振動等試驗(yàn)。振動及沖擊測試結(jié)果如圖6 所示。

圖6 振動及沖擊試驗(yàn)測試數(shù)據(jù)曲線圖
如圖6 所示,沖擊試驗(yàn)波形為半正弦波,峰值加速度為20g,脈沖持續(xù)時(shí)間為8~10 ms,沖擊方向?yàn)榇怪陛S正向,沖擊次數(shù)為10 次。振動試驗(yàn)帶寬為10~500 Hz,功率譜密度為0.015 g2/Hz(10Hz)、0.015g2/Hz(40 Hz)、0.000 15g2/Hz(500 Hz),總均方根加速度為1.04g,3 個(gè)正交軸向,每軸向振動30 min。
綜合環(huán)境試驗(yàn)測試項(xiàng)目相關(guān)結(jié)果如表1 所示。

表1 環(huán)境試驗(yàn)測試項(xiàng)目相關(guān)結(jié)果
3.2 電磁兼容性試驗(yàn)
相關(guān)電磁兼容性測試主要依據(jù)《GJB151B-2013軍用設(shè)備和分系統(tǒng)電磁發(fā)射和敏感度要求與測量》相關(guān)要求[16],對該方法相關(guān)核心部分(含硬件及軟件)檢測了CE101(25 Hz~10 kHz 電源線傳導(dǎo)發(fā)射)、CE102(10 kHz~10 MHz 電源線傳導(dǎo)發(fā)射)和CS101(25 Hz~150 kHz電源線傳導(dǎo)敏感度)、RS103(10 kHz~1 GHz電場輻射敏感度)測試項(xiàng)目,測試結(jié)果如圖7 和表2 所示。

表2 電磁兼容性測試表

圖7 電磁環(huán)境試驗(yàn)測試數(shù)據(jù)曲線圖
3.3 實(shí)航試驗(yàn)
采用搭載方式,利用某型水下航行體在國內(nèi)某深水湖進(jìn)行了實(shí)航測試。實(shí)航測試時(shí),航行體設(shè)定航路中水面浮起點(diǎn)(即北斗衛(wèi)星通信及定位點(diǎn))為3~5 個(gè),在每個(gè)點(diǎn)位,北斗定位及通信完成規(guī)定動作后繼續(xù)下潛航行。
實(shí)航試驗(yàn)中發(fā)現(xiàn),在某點(diǎn)位時(shí)出現(xiàn)短時(shí)航行體北斗狀態(tài)異常后又恢復(fù)正常,即在規(guī)定時(shí)間范圍內(nèi)仍較長時(shí)間(分鐘級別)未能及時(shí)定位,等待一段時(shí)間后收到相應(yīng)信息。回收水下航行體后,通過試后讀取安裝在航行體內(nèi)本監(jiān)控方法電路內(nèi)部記錄數(shù)據(jù)可知,在上述點(diǎn)位航行體北斗狀態(tài)出現(xiàn)異常,使用該方法介入操控,并重新實(shí)現(xiàn)該點(diǎn)位的航行體北斗規(guī)定動作與功能。
由此可見,該方法可在水下航行體規(guī)定時(shí)間內(nèi)進(jìn)行連續(xù)解算和判別,一旦航行體內(nèi)部出現(xiàn)北斗異常,及時(shí)進(jìn)行總線級介入性操控,解決某型水下航行體北斗偶發(fā)故障問題,進(jìn)一步提高航行體北斗通信及定位有效率和可靠性。
4 結(jié)論
某型水下航行體北斗狀態(tài)監(jiān)控方法在航行體內(nèi)部空間、功耗等受限條件下,摒棄常規(guī)的隔離電源和繼電器等大尺寸元件構(gòu)建方案,采用微型芯片加負(fù)載開關(guān)等方法實(shí)現(xiàn)硬件接口隔離,以滿足實(shí)際的安裝、功耗以及電磁兼容性等要求。
在程序設(shè)計(jì)中,提出一種基于軟件模擬UART方式對通信總線數(shù)據(jù)進(jìn)行并行監(jiān)測,并利用多個(gè)UART 進(jìn)行串口并行數(shù)據(jù)流監(jiān)控的方法,避免并行串口監(jiān)測過程兩個(gè)發(fā)送端同時(shí)發(fā)送數(shù)據(jù)出現(xiàn)故障的問題。結(jié)合硬件平臺進(jìn)行環(huán)境試驗(yàn)和電磁兼容性試驗(yàn),試驗(yàn)結(jié)果表明,該方法及程序設(shè)計(jì)滿足實(shí)際使用要求,并滿足航行體內(nèi)部結(jié)構(gòu)及電子環(huán)境等要求,在航行體內(nèi)部復(fù)雜工況下,實(shí)現(xiàn)內(nèi)部北斗狀態(tài)的實(shí)時(shí)監(jiān)測與及時(shí)操控等功能。另外,在國內(nèi)某深水湖完成該型水下航行體的實(shí)航驗(yàn)證。
該方法與程序結(jié)合北斗處理器輸出數(shù)據(jù)進(jìn)行實(shí)時(shí)處理解算,根據(jù)當(dāng)前點(diǎn)位的北斗衛(wèi)星狀態(tài)進(jìn)行分析判斷,從而在航行體北斗工作異常時(shí)進(jìn)行相應(yīng)操控,進(jìn)一步提高水下航行體北斗工作的可靠性,從而提高水下航行體實(shí)航安全性,具有較高的工程實(shí)用價(jià)值。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
