飽和約束下事件觸發(fā)多智能體系統(tǒng)量化通信環(huán)形編隊(duì)控制
2022-10-28 03:42:14張海江文家燕謝廣明景永年
廣西科技大學(xué)學(xué)報(bào) 2022年4期
張海江,文家燕*,謝廣明,2,景永年
(1.廣西科技大學(xué) 自動(dòng)化學(xué)院,廣西 柳州 545616;2.北京大學(xué) 工學(xué)院,北京 100871;3.黑芝麻智能科技有限公司,廣東 深圳 518005)
0 引言
近年來多智能體的編隊(duì)控制問題作為一個(gè)熱點(diǎn)問題被廣泛應(yīng)用于各個(gè)領(lǐng)域。環(huán)形編隊(duì)作為編隊(duì)控制的一個(gè)基準(zhǔn)問題而備受學(xué)者關(guān)注。Ⅹu等給出了環(huán)形編隊(duì)的具體定義,并證明了環(huán)形編隊(duì)的可行性。Wang等針對(duì)在環(huán)形編隊(duì)過程中的智能體排序和碰撞問題進(jìn)行分析,設(shè)計(jì)了相應(yīng)的通信協(xié)議以保證環(huán)形編隊(duì)可實(shí)現(xiàn)。
上述控制方法是假設(shè)系統(tǒng)中智能體之間的通信信道具有足夠大的帶寬或容量。但在實(shí)際系統(tǒng)中,數(shù)字網(wǎng)絡(luò)通信會(huì)受到不同程度的帶寬和容量限制。針對(duì)這一問題,F(xiàn)rasca 等提出了基于數(shù)據(jù)量化的通信算法,通過使用靜態(tài)量化器來完成智能體之間的信息交換。在此基礎(chǔ)上,Carli等提出了一種動(dòng)態(tài)編解碼量化算法,設(shè)計(jì)了一種基于編碼-解碼器的量化器并在量化器中引入一個(gè)標(biāo)度函數(shù),實(shí)現(xiàn)了系統(tǒng)在有限量化級(jí)別上的一致性。此后,量化算法得到了快速發(fā)展,形成了不少理論成果。Li等設(shè)計(jì)了一種可以對(duì)稱補(bǔ)償?shù)牧炕椒ǎㄟ^調(diào)整量化器自身相應(yīng)參數(shù),將每個(gè)數(shù)字通道傳輸?shù)谋忍財(cái)?shù)減少到只有1 bit。
在系統(tǒng)實(shí)際工作中,有時(shí)無需對(duì)系統(tǒng)的控制輸入信息進(jìn)行實(shí)時(shí)更新,尤其是在某些資源受限的工況下。基于此,Guo 等將事件觸發(fā)機(jī)制引入多智能體系統(tǒng)中,相對(duì)于時(shí)間驅(qū)動(dòng)機(jī)制,這種方法可以有效降低系統(tǒng)的更新頻率,減少不必要的通信資源損耗。事件觸發(fā)機(jī)制也被進(jìn)一步應(yīng)用于一般線性系統(tǒng)、二階系統(tǒng)以及非線性系統(tǒng)中。此外,在實(shí)際物理系統(tǒng)中存在輸入受限的工程約束,這是控制理論面向工程實(shí)現(xiàn)所必然要面對(duì)的問題。蔡旭等考慮了多智能體系統(tǒng)在實(shí)際應(yīng)用中存在的輸入飽和現(xiàn)象,并給出了系統(tǒng)闡述。
綜上可知,在多智能體系統(tǒng)研究中,綜合考慮輸入受限、通信帶寬有限和節(jié)約有限資源消耗等約束在一起的環(huán)形編隊(duì)控制問題,仍是一個(gè)熱點(diǎn)、難點(diǎn)問題。為此,本文針對(duì)一階帶有輸入限制的多智能體動(dòng)力學(xué)模型,圍繞耦合考慮系統(tǒng)資源有限、通信帶寬限制等問題,提出基于事件觸發(fā)控制策略和量化通信機(jī)制的控制律,在保證系統(tǒng)能實(shí)現(xiàn)環(huán)形編隊(duì)的前提下,探究對(duì)系統(tǒng)有限資源的節(jié)約和通信所需帶寬的減小。
1 問題描述
1.1 代數(shù)圖論
令R、N 和Z分別表示實(shí)數(shù)集、自然數(shù)集和正整數(shù)集。表示矩陣的轉(zhuǎn)置,‖‖表示矩陣的范數(shù)。列向量1∈R,0∈R表示向量?jī)?nèi)所有元素分別等于1和0,為自然數(shù)。
對(duì)于一個(gè)加權(quán)有向圖=(,E,A),其中={,,…,v}表示節(jié)點(diǎn)集,={1,2,…,}為節(jié)點(diǎn)的下標(biāo)集。E?×表示邊集,(v,v)∈E表示智能體到智能體的單向通信信道。 A=[a]∈R 為加權(quán)鄰接矩陣,如果a≠0則表示智能體與智能體之間存在相應(yīng)權(quán)重的信息交換,a=0則表示智能體與智能體之間不存在信息交換。矩陣=- A為對(duì)應(yīng)拓?fù)鋱D的Laplace 矩陣,其中矩陣是有向圖的度矩陣(為對(duì)角陣)。
1.2 環(huán)形編隊(duì)問題描述
考慮由(≥2)個(gè)智能體組成的系統(tǒng),每個(gè)智能體都是相互獨(dú)立的個(gè)體。所有智能體的初始位置都隨機(jī)分布在一個(gè)圓上且不發(fā)生重合。規(guī)定每個(gè)智能體只能與其逆時(shí)針方向的鄰居進(jìn)行信息交互。
如圖1所示,為了更易于解釋環(huán)形編隊(duì)的編隊(duì)運(yùn)動(dòng)過程,將按照逆時(shí)針方向?qū)λ械闹悄荏w從1到(≥2)進(jìn)行編號(hào),即()=[(),(),…,x()],其中(t)表示智能體在時(shí)刻的角度位置狀態(tài)。所有智能體初始位置均滿足如下條件:

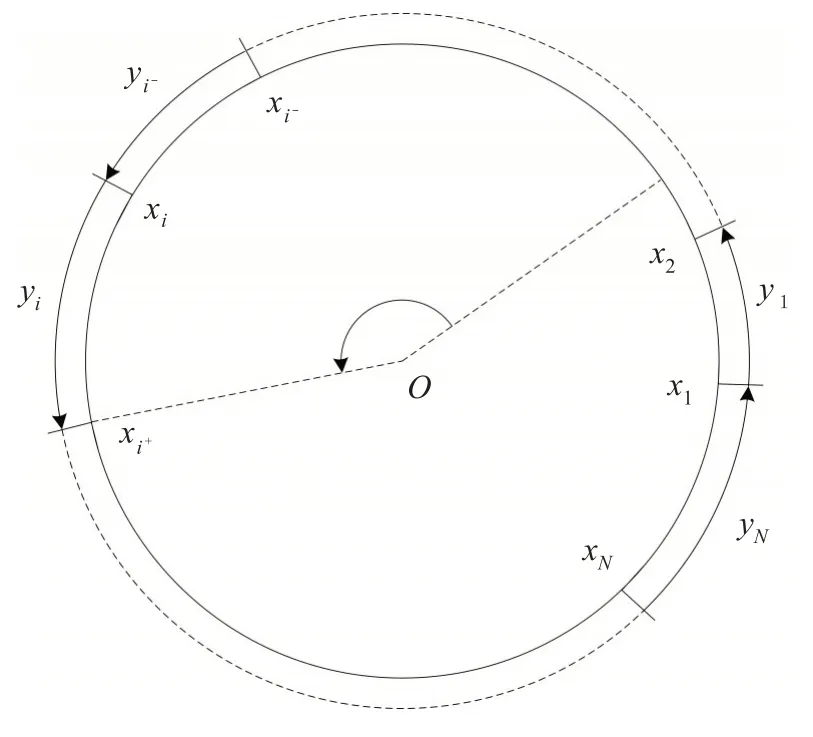
圖1 智能體在環(huán)上分布圖
如圖1所示,所有的智能體始終都在固定的圓環(huán)上運(yùn)動(dòng),且每個(gè)智能體僅能感知到逆時(shí)針方向鄰居的信息;因此,為不失一般性,作如下定義:
其中,為智能體逆時(shí)針方向緊鄰的智能體,為智能體順時(shí)針方向緊鄰的智能體。令d表示智能體與其鄰居智能體之間的期望角度間距;因此,期望的環(huán)形編隊(duì)相對(duì)間距可以由式(2)的向量確定:
2 系統(tǒng)動(dòng)力學(xué)模型
考慮一個(gè)具有輸入限制的個(gè)智能體組成的多智能體系統(tǒng),其一階動(dòng)力學(xué)模型描述如下:

其中,x()為智能體的當(dāng)前狀態(tài),u()為智能體的控制輸入。sat(*)為非線性的對(duì)稱輸入飽和函數(shù),其函數(shù)表達(dá)式為:

令y∈(0,2π)表示智能體與其逆時(shí)針方向鄰居之間的實(shí)際角度距離,其表達(dá)式如下:
環(huán)形編隊(duì)定義:對(duì)于一個(gè)給定的可容許的期望環(huán)形編隊(duì),通過設(shè)計(jì)分布式控制協(xié)議u()=u(y,d),=1,2,…,,使得在滿足式(1)的初始條件下,系統(tǒng)(3)的解始終收斂到某個(gè)平衡點(diǎn),且滿足=,即可實(shí)現(xiàn)環(huán)形編隊(duì)。

其中()表示矩陣I-去掉第一行第一列的一個(gè)子矩陣,則有如下關(guān)系成立:
3 基于事件觸發(fā)與量化通信的控制律設(shè)計(jì)
首先,借助環(huán)形編隊(duì)控制問題的相關(guān)做法,基于事件觸發(fā)的環(huán)形編隊(duì)控制協(xié)議設(shè)計(jì)如下:




其次,將介紹在有限通信帶寬下,多智能體系統(tǒng)中任意2個(gè)相鄰的智能體間的量化通信的實(shí)現(xiàn)過程。對(duì)于每個(gè)智能體,其中∈{1,2,…,},其對(duì)應(yīng)的基于事件觸發(fā)編碼器φ設(shè)計(jì)如下:
其中:ξ()∈R 為編碼器φ的內(nèi)部狀態(tài);s()為智能體傳輸給其鄰居的當(dāng)前信息;(-1) >0是一個(gè)衰減函數(shù);q()表示具有有限量化級(jí)數(shù)的均勻量化器,其作用是把智能體當(dāng)前狀態(tài)的偏差值映射為離散的量化器所對(duì)應(yīng)的量化層級(jí)。q()如下所示:
式中:為量化器的量化間隔;≥1 為量化層級(jí)。在每次智能體進(jìn)行信息傳遞時(shí),其通信信道的傳輸比特?cái)?shù)為log(2+1)比特。此外,在智能體之間進(jìn)行信息交換時(shí)必須保證量化器始終處于不飽和狀態(tài)。
當(dāng)智能體接收到智能體傳遞過來的當(dāng)前狀態(tài)信息s()時(shí),需要通過對(duì)應(yīng)的解碼器ψ將智能體的狀態(tài)值估計(jì)出來。解碼器ψ數(shù)學(xué)表達(dá)式如下:


為便于分析,在分布式控制協(xié)議(6)的基礎(chǔ)上,引入中間變量以簡(jiǎn)化后續(xù)的理論證明,其變換如下:

綜上設(shè)計(jì)與分析,聯(lián)合式(11)、編碼器(8)、解碼器(10),對(duì)控制協(xié)議(6)進(jìn)行設(shè)計(jì),可以得到基于事件觸發(fā)與量化通信機(jī)制的分布式控制協(xié)議,具體如下:

4 環(huán)形編隊(duì)可實(shí)現(xiàn)性與量化器設(shè)計(jì)合理性分析
4.1 環(huán)形編隊(duì)可實(shí)現(xiàn)性理論證明
證明系統(tǒng)在所設(shè)計(jì)的控制協(xié)議(12)的作用下,可以實(shí)現(xiàn)期望的環(huán)形編隊(duì)。具體包括2個(gè)方面:一是系統(tǒng)在事件觸發(fā)條件(7)下是穩(wěn)定的;二是證明系統(tǒng)在前述條件作用下,環(huán)形編隊(duì)可以實(shí)現(xiàn)。具體如下:
將式(12)代入式(3),可以得到如下結(jié)果:
根據(jù)式(13)可以將個(gè)智能的系統(tǒng)模型寫成緊湊形式,具體如下:
考慮如下合適的Lyapunov函數(shù):

沿著時(shí)間變量對(duì)Lyapunov函數(shù)求導(dǎo),得到:

令Δ<0,可以得到如下不等式:
根據(jù)范數(shù)的運(yùn)算法則可以將式(15)改寫為:

綜上,證明了系統(tǒng)在事件觸發(fā)條件(7)和控制協(xié)議(12)下是穩(wěn)定的。根據(jù)文獻(xiàn)[15]中的定理1 可知,當(dāng)時(shí)間步長(zhǎng)≤1 時(shí),在所給出的控制協(xié)議(12)下,可以實(shí)現(xiàn)任意一個(gè)期望的環(huán)形編隊(duì)。
4.2 量化器設(shè)計(jì)合理性分析
由于量化器一旦出現(xiàn)飽和則無法確定此時(shí)傳遞的信息是否為智能體的真實(shí)狀態(tài)信息,因此,如何通過合理設(shè)計(jì)相應(yīng)參數(shù),保證所設(shè)計(jì)的量化器在任意時(shí)刻都不會(huì)飽和是十分必要的。


則基于量化通信的環(huán)形編隊(duì)可以實(shí)現(xiàn),且智能體之間進(jìn)行信息交互時(shí),量化器始終不會(huì)出現(xiàn)飽和。
證明:結(jié)合編碼-解碼器對(duì)表達(dá)式可以得到:
定義矩陣J= Iξ,其中向量為引理1 中矩陣的第一行,則JL= LJ=0 成立。結(jié)合式(18)可得:
為了使證明過程更加清晰明了,將分2個(gè)步驟來證明系統(tǒng)工作過程中所有的量化器不會(huì)飽和:
由式(23)中的結(jié)果可知,當(dāng)=0 時(shí),系統(tǒng)中所有量化器均不飽和。
2)當(dāng)≥1,對(duì)任意的非負(fù)整數(shù)=0,1,…,,假定如下關(guān)系成立:
在式(26)中,可將復(fù)雜關(guān)系式分三部分進(jìn)行整理,具體如下:

結(jié)合給出的的存在條件以及式(24)與式(30)可得:
根據(jù)式(31)的結(jié)果可知,如果存在(2+1)量化電平數(shù)的量化器滿足式(17)與式(31)的條件時(shí),那么在系統(tǒng)運(yùn)行的整個(gè)過程中,所有智能體對(duì)應(yīng)的量化器都不會(huì)出現(xiàn)飽和現(xiàn)象。至此,量化器合理性得證。
5 數(shù)值仿真與驗(yàn)證
為驗(yàn)證所提出算法的有效性,本節(jié)將給出基于Matlab的數(shù)值仿真驗(yàn)證。考慮由6個(gè)智能體組成多智能體系統(tǒng),智能體初始狀態(tài)為滿足條件(1)的任意位置,智能體之間的期望環(huán)形編隊(duì)的角度差由滿足條件(2)的向量確定,具體如下:
設(shè)定量化器的相關(guān)參數(shù)為=0.05,=10,=0.982 88。仿真結(jié)果如圖2、圖3所示。
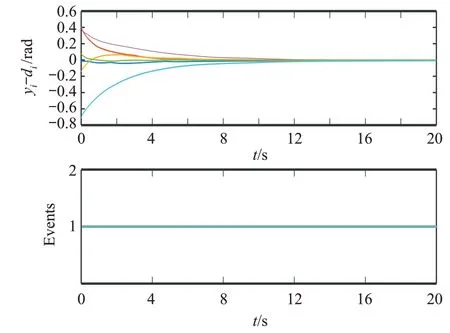
圖2 (網(wǎng)絡(luò)版彩圖)連續(xù)時(shí)間觸發(fā)下各智能體的狀態(tài)信息
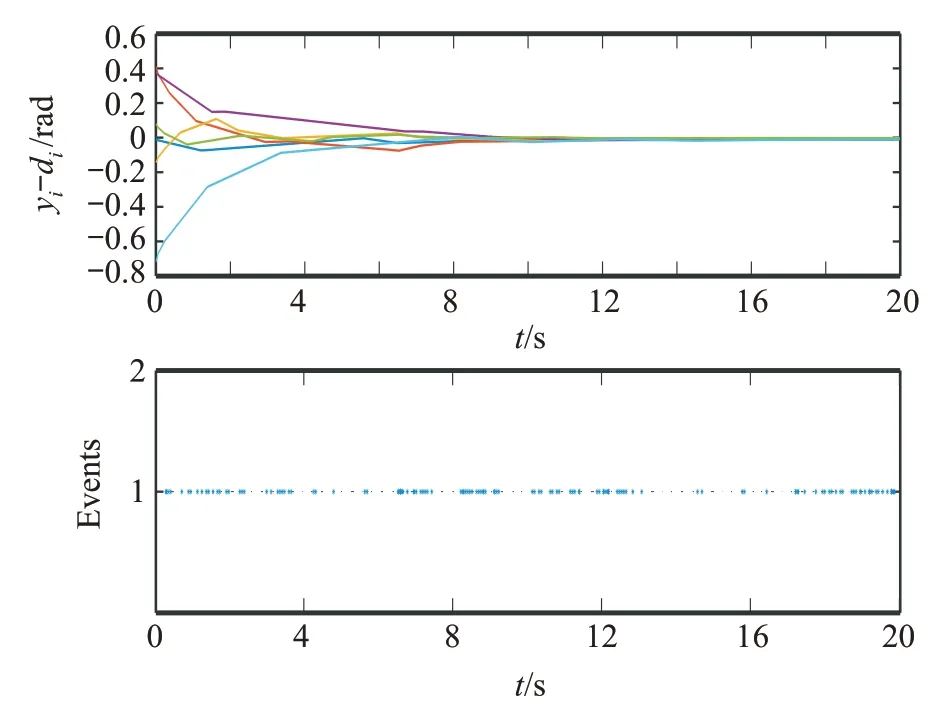
圖3 (網(wǎng)絡(luò)版彩圖)事件觸發(fā)下各智能體的狀態(tài)信息
通過觀察圖2 和圖3 中的仿真結(jié)果可知,在系統(tǒng)允許的誤差范圍內(nèi),事件觸發(fā)控制策略能有效地降低智能體之間的通信頻率,達(dá)到節(jié)省系統(tǒng)有限通信資源的目的。
本文在文獻(xiàn)[16]的研究基礎(chǔ)上進(jìn)一步考慮系統(tǒng)中存在輸入飽和限制,結(jié)果如圖4、圖5所示。對(duì)比圖4 和圖5 可以看出,雖然系統(tǒng)中控制器的調(diào)節(jié)時(shí)間會(huì)受到輸入飽和限制的影響而增加,但系統(tǒng)中的每個(gè)智能體都能在所設(shè)計(jì)的控制協(xié)議下使自身狀態(tài)保持在一個(gè)很小的誤差范圍內(nèi),使得多智能體運(yùn)動(dòng)至期望編隊(duì)位置。

圖4 (網(wǎng)絡(luò)版彩圖)輸入不受限時(shí)各智能體的狀態(tài)信息(詳見文獻(xiàn)[16])
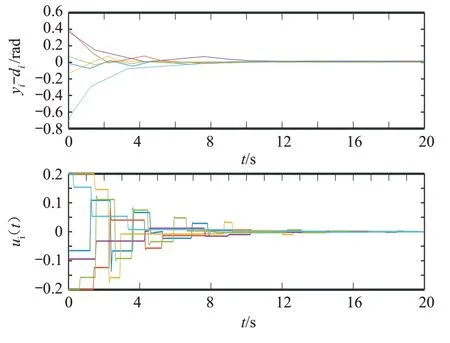
圖5 (網(wǎng)絡(luò)版彩圖)輸入受限時(shí)各智能體的狀態(tài)信息
文中設(shè)定的量化器量化間隔=0.05。從圖6中可以清晰地看到,在系統(tǒng)運(yùn)行過程中的任意一個(gè)時(shí)間點(diǎn)上,各個(gè)智能體的量化器都沒有出現(xiàn)飽和現(xiàn)象,證實(shí)了本文所設(shè)計(jì)的量化通信方案可行。
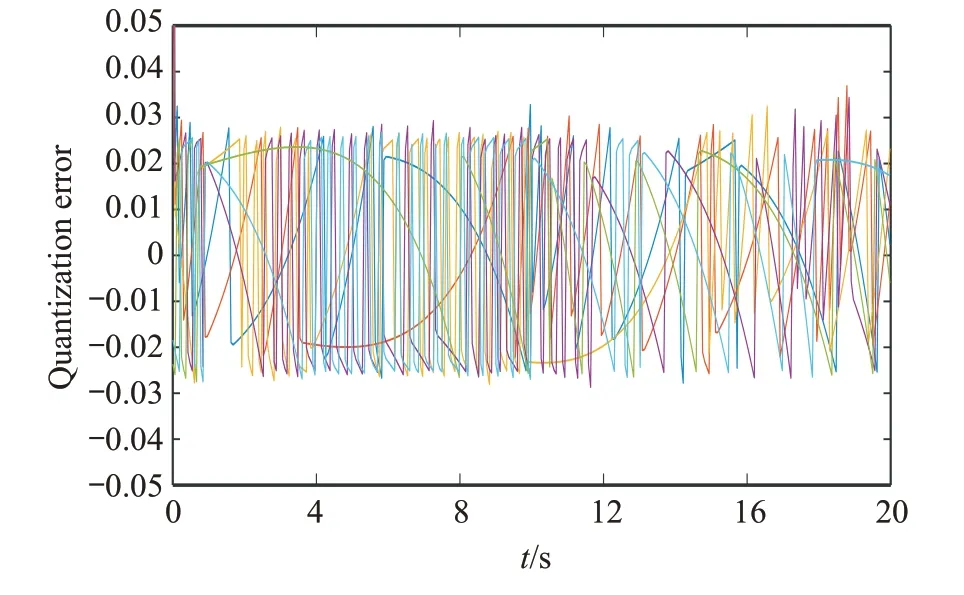
圖6 (網(wǎng)絡(luò)版彩圖)各智能體的量化誤差(β=0.05)
6 結(jié)束語
本文研究了一階帶有輸入飽和限制的多智能體系統(tǒng)事件觸發(fā)量化通信環(huán)形編隊(duì)問題,其中智能體與其鄰居之間的通信和狀態(tài)更新由事件觸發(fā)機(jī)制控制。考慮實(shí)際工程中存在輸入飽和、系統(tǒng)資源受限和通信帶寬受限等問題,設(shè)計(jì)了帶有輸入飽和的事件觸發(fā)機(jī)制與量化通信方式相結(jié)合的控制策略,在保證任意一個(gè)時(shí)間點(diǎn)上所有量化器均不飽和的前提下使系統(tǒng)達(dá)到期望的環(huán)形編隊(duì)。最后通過仿真驗(yàn)證了所提出控制策略的有效性。未來的工作將更加關(guān)注實(shí)際系統(tǒng)中的問題,例如將量化通信與輸入飽和限制推廣到一般線性或者異構(gòu)系統(tǒng)中。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
