輕型機載激光雷達技術在公路勘測設計中的應用
2022-10-27 09:36:14張志敏許麗雯肖綺霞
大科技 2022年40期
何 巧,張志敏,許麗雯,肖綺霞
(廣州城市職業學院,廣東 廣州 510000)
0 引言
對于機載的激光雷達航測主要是能夠集激光掃描以及全球定位等系統融合的新時期高科技的采集技術為一體的重要航測技術。對比于以往的機載激光雷達航測技術來說,這種新型的雷達航測技術可以更有效地實現智能化趨勢,并且受到外界天氣因素的阻礙較小,最終測量出的數據精準程度也要更高一些。這也是該技術在三維空間方面的重要突破,這能夠為獲得更高分辨率的空間信息提取提供更加有效地幫助。而輕型的機載激光雷達航測主要是以恩斯特龍、貝爾407等為主要的飛行載體,在這樣的情況下就可以有效地降低大型機場停靠的經濟成本問題,同時對于降落場地的選擇也更加具有靈活性,這更能夠做好對于公路勘測設計工作的有效知識。
1 機載激光雷達測量的發展及現狀
美國在20 世紀70 年代登月計劃中就已經使用了激光雷達(LIDAR)這一技術。伴隨著時代的發展,人們對于GPS 等精準定位技術也應用更加普遍,因此在飛機上面應用的激光測高儀也能夠更好地推進數據采集準確性,并通過掃描方式來改變以往的激光束發射方向。同時聯合有機集成設備進行協作來構建一個較為健全的機載激光雷達測量相關系統,這樣也能為其他的工作提供更加有效的幫助。
在機載激光雷達系統的發展過程當中,該技術也日趨成熟,越來越多的國家對這一技術的使用也更加廣泛。美國、加拿大多個等國為潛在淺海地形的勘測過程中,都應用了機載激光雷達測量相關技術來完成相關工作,注意將飛行高度控制在為500~600m,直接測距與定位,最終得到DEM。從我國的角度來說,當前的機載激光雷達相關系統已經被應用在1:2000 甚至1:1000 大比例尺成圖并取得了很大的成就[1]。
還需要注意的是,要想做好公路相關的勘測設計工作,比例尺需要選擇1:2000,在此基礎上來保證橫斷面專題圖成果能夠更好地達到要求。本文當中以京滬高速公路改擴建勘察設計項目為例,在其中充分的介紹當前采用輕型機載激光,雷達航測相關技術如何合理地進行航線規劃。同另外工作人員的綜合實力也要全面的提升,根據現場所提供的重要數據支持,來合理地規劃好所有項目中的具體工作時間以及用到的技術。保證能夠高效的對數據進行提取并做好分析,進而為該項目的落實提供重要的基礎。
2 項目概況
2.1 測區介紹
與此同時,經過對該項目的深入了解,發現該項目的主要測區路段總長度大約有260km。但由于該路段當中被植被所覆蓋的區域比較大,因此也導致該項目執行過程中會存在較大難度。
2.2 項目任務
從我國的角度來說,當前的機載激光雷達相關系統已經被應用在以貝爾407 載人直升機為平臺。制作完成了1:2000 比例尺數字正射影像并根據業主提供的設計成果實現了中樁橫斷面專題圖的及時制作[2]。
2.3 機載激光雷達航測設備
(1)飛行平臺。這一技術主要應用在了貝爾407 載人直升機上面,此外在進行探測的過程當中選擇2 處平臺區域,以此來作為飛行過程中的臨時起點以及降落點。導航上面所使用的雷達相關導航系統,也需要根據實時的情況來及時糾正飛機在側滾以及仰俯等狀態下的速度和高度的維持。
(2)機載激光雷達航測設備。該技術設備所采用的主要系統是由加拿大所發明的OptechGemini 系統。這一系統當中所使用的脈沖頻率在16.6 萬Hz 左右,并且其平時的工作高度應當控制在150~400km 的范圍之內,這樣就能保證測量的精準程度有效提升。配置的數碼相機像素約在3900 萬左右,鏡頭焦距47mm[3]。
2.4 項目實施概況
項目從實際情況來看,對南方的植被覆蓋面積較大,所以在進行勘測的過程當中,一定要做好相應的計劃與準備,保證機載的高度與地面高度保持在良好的位置,同時將誤差減少到0.2m 左右。
3 項目實施關鍵技術
3.1 集成機載激光雷達航測點云和航片的大比例尺DLG 測圖方法
當將該技術使用到實處的過程當中,可以在第一時間獲得到第一密林區的地貌情況,同時根據區域位置建立TIN 網自行內插等高線。同時通過后期的一些剪輯方式來更加有效地獲取到等高線專題圖等相關元素。但需要注意的是,機載激光雷達航片在長時間的使用情況之下很容易出現變形的情況,工作人員則需要選用合適的方式來進行處理。目前,我國機載激光雷達航測設備大多是在自制的DOM 產品技術基礎上,采集道路、水系等的平面元素。然而,這種科技方式還面臨著DLG 道路、水體等建筑物平面要素的獲取準確度低下、建筑物外部輪廓形狀數據信息無法精確獲得等問題。本文章的項目在進行使用的過程當中應當使用通過TerraSolid 軟件方式對機上激光雷達飛行測試數字航片實施空三加密處理。通過StarModeler 對上述的空三加密成果實現了文件格式轉化,提供由Virtuoz、航天遠景等攝影測試與立體測圖軟件系統均提供技術支持的PAT-B 格式空三加密文檔,進而解答了機載激光雷達航空測量的大規模性與立體精密測圖問題[4]。本項目將充分發揮機載激光雷達飛行監測多主數據庫特性和技術資源優勢,通過利用獲得的高精度、高密集點云獲得等高度線、高程注記點等高度要素,從而開創性地實現了集成機載激光雷達航空測量點云與航空圖片的大規模性DLG 檢測圖工藝化制造技術過程。圖1 中是自主開發的軟件工具StarModeler 數據處理界面。
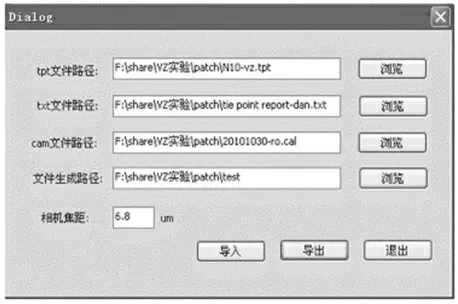
圖1 空三成果轉換軟件
3.2 LiDAR 技術
從目前的情況來看我國的機載相關機關雷達測量系統,涵蓋多種較為先進的相關技術,同時也包含了多種GPS 等技術的升級內容。在這樣的情況下應用在公路相關探測的設計工作當中,就能有效地獲得高精度的數據并作為數字相關模型的有效支持,進而提升當前的公路勘測相關質量。
從文章當中的項目了解情況來看,激光雷達測量系統采用SkvEve 天眼激光科技有限公司的SE-J500C系統。在使用當中集激光的掃描儀以及數碼相機等內融為一體,最終的采樣頻率大約在100Hz 左右,通過利用LIDAR 技術的,同時將多個載體進行系統的作業,就可以將定位坐標的精度精確到0.15~1m,對高度就可以精確到10~30cm,對地面的分辨率更是能夠達到厘米的程度,通過這些精確的信息數據,就可以清晰的掌握某一地區的地理位置和地理特點,提供更加精確的三維信息。所以這一技術的使用要比傳統技術更加具有先進性,同時掃描的范圍也要更大一些。飛機則使用北方天途飛機科技發展公司的M6FC6 旋翼無人機[5]。
3.3 LiDAR 航空攝影
在使用先進的技術進行航拍的過程當中,一定要嚴格遵循具體要求來執行,如果發現存在漏拍等問題,那么就要及時的補充拍攝。補拍的過程當中一定要在不影響后續業務的基礎之上來進行,并注意只需要補拍漏洞即可對于其他位置不應耗費過多時間。有學者孫嘉悅,張旭晴,牛雪峰等研究了區域位于吉林省西北部的白城地區,松嫩平原西部,科爾沁草原東部的某項目。其地勢由西北向東南依次為低山、丘陵和平原,西南略有抬升。白城市草原遼闊,可利用草場面積9064km2,適用于提取植被點試驗[6]。低矮植被為植高20~30cm 的不易與地面點分離的植被點。選取一塊寬1600 像素,長1200 像素,像素大小為0.05m 的區域,區域內包含1410 個激光點,其中包含地表點與低矮植被點兩種激光點。在數據處理過程中,通過對研究區域進行去噪工作、保持迭代角度為3°不變、距離為0.31m 不變且角度為2.5°~3°每隔0.1m 做一次實驗等流程后論出:在低矮植被較多或者地勢平坦的區域,迭代角度為最小值1 時,低矮植被點造成的小氣泡狀的等高線會被完全清除,此現象說明迭代角度值越小,低矮植被分離效果越好[7]。
3.4 激光點云分類
(1)利用TerraSolid 軟件濾波(分離地面點和非地面點):該軟件基于不規則三角網原理,通過設定參數閾值進行濾波。其主要的參數設置項為:Maxbuildingsize Terrianangle Iterationangle 等,或值大小取決于測區的地形以及植被的高低、密度等。
(2)將分離出來的非地面點進行有效劃分可以根據點的高程、散布的形態、密度等情況進行落實。針對形態規律、空間結構特點突出的地物(如房屋、電力塔等),可利用參數設定,或利用軟件自動獲取。同時,可以通過人機交互方法輔助分析。也可以使用根據光反射強度、回波頻率、地物形態特征等的計算機算法組合,對節點云數據實現自主分析。
3.5 精度要求
DOM 在使用過程當中一定不能出現任何的劃痕以及噪聲等,點云數據密度應大于1 個點/m2。數字地形模型精度要求是:道路縱斷面數模采集精度應滿足平面精度10 個cm,高程精度≤5cm。被交路線應按規定抽取精度應滿足平面精度≤5cm,高程精度<3cm。
4 數據處理及成果制作
4.1 機載激光雷達航測數據處理流程
在通過對數據分析之后,還要進行預處理,利用GPS 等技術來將檢測的初始結果及資料提升原有的精準度。利用GPS 差劃分算POS 數據分析,經過檢測后分析航測的初始資料質量,并制定條帶點云、數碼航片、航跡線、航片GPS 時間搜索文件等機載激光雷達航測初始資料結果。最后將了解到的數據進行充分的分析之后再做處理,就能更好地保證精準程度更加符合現階段要求,再利用內插制作大規模性的DEM 結果。在上述得到的飛機航跡線和航片GPS 日期搜索文檔基本上得到了飛機照片外位置元素的日期搜索文檔,再利用同名點選擇和照相畸變擬合,從而做出大比例尺DOM 結果[8]。圖2 是測點機載激光雷達航空觀測數據和大比例尺測圖法的概略數據處理過程。
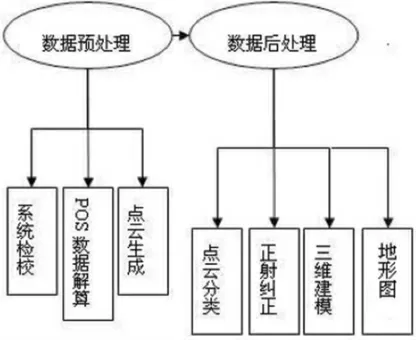
圖2 數據處理流程
4.2 LiDAR 數據處理流程
應用輕型機載激光雷達航測系統,針對數據處理層面,要按照LiDAR 數據處理流程進行。
(1)對文件的制作首先要針對導航情況并依據實際的區域位置做好數據的分析。最終要聯合地面的GPS 等基站內容進行充分的處理來實現導航數據的文件落實,從而為今后的發展提供有效幫助。
(2)還要注意對于文件的選擇,要保證所有準確性的數據都能控制在合理范圍之內,如果存在漏洞,要第一時間進行解決。
(3)最后使用的三維激光點相關技術來進行計算,對原始的激光束聚焦,更好地對數據分析,并為后期的判斷做好重要的基礎。根據數據所得到的高程控制點也要進行及時校正,保證三維空間坐標能正確的計算出來。
4.3 DEM 產品制作
DEM 是目前使用頻率較高的一種技術,它能夠有效地發揮自身價值并提升數據監測準確性。制作過程如下:①格網化。依據整體的點云位置值以及參照的節點之間距離,需要將兩者進行充分的結合,并保證位置能夠更加符合當前要求。然后分點云數據,將其分為多個較小的圖幅塊。②填充小縫隙。在進行信息化的技術使用時,可以結合有效技術來對縫隙進行填充保障周圍的圖像不會出現裂縫等情況,進而影響數值的分析。③產生浮雕映像。運用一定的手段,將已制作完成的大地資料產生浮雕影像,從而后續形成三維空間模式,以直觀反映地表現實。④過濾。過濾這一工作主要是對過濾的具體參數進行測試,選擇好這一內容之后才能更好地確保數據品質達到現階段要求,從而減輕手工人員的工作壓力。⑤手工編輯。濾波后影像上黑洞是濾波掉附近地物后留下的,只有需人工方法干涉的方式才能達到這一目的。⑥裁剪重疊區。內插完后,要修剪各幅畫面邊上的重疊部分,最后生成DEM 模式。
在通過上述的處理工作之后,最終得到的點云數據也要根據點云的相關剖面圖進行參考,了解周圍區域的建筑和植被稠密程度。通過有效的了解并充分的劃分來保證所有的劃分質量更能在原有基礎上有效地提升,并為數量以及技術的落實提供有效幫助[2]。
4.4 DOM 產品制作
DOM 制作要充分地根據影像來進行校正工作,這樣可以確保外部的采集影像能夠更符合現階段的標準,并注重在短時間內形成正射的相關影像。然后,必須完成勻色。首先將所獲得的影片輸入INPHO 軟件,并完成了對正滿射像的勻色處理,使得影片總體色彩更加和諧、均勻。再一步,必須對編輯鑲嵌線完成合理制造。終于,完成影片分幅制造,終于得到正滿射像DOM。以點云設計的數字地面模式為依據,使用從POS操作系統中提取的外方位元件直接實現了全自動空三加密,整套生產的制造過程無須外業像控點。僅要求透過計算公共加密點的較差值,對基本定向點技術指標加以分析與評估而已。生產過程中發現,加密點的數量分布和成果精度之間有密切關聯。
從另一個角度來說,在進行大范圍的相關制作過程當中為使DOM 影像能夠更加均勻地呈現出來并且過渡更加自然,這也需要工作人員對原始航片調色與DOM 后期進行綜合處理。
4.5 DLG 制作
從目前的情況來看,DLG 制作主要分為平面要素和高程要素。DLG 高度基本要素使用4.2 得到的地面高度點自動制造.與此同時,注重高線的平滑度,在國家的相關標準范圍之內落實,如果沒有達到規范,那么就要不斷進行調整處理。圖3 為疊加DOM 影像圖后的DLG圖成果。

圖3 疊加DOM 后的DLG
4.6 中樁橫斷面專題圖提取
機載激光雷達的成果主要用于公路勘察設的以下幾個專業:中樁、橫斷面地面高程,拆遷建筑物調查、不良調查、高壓線。該項目設計過程當中相關的測區測量的方式并采用了2000 多個精度檢測點來將其均勻的進行分布。通過此種方式,能夠更好地提升數據的精準程度。在業主提交的工程線路數據基礎上,以網上生成的地面點云為基礎,建立了TIN 三角網,并編制出了中樁縱向斷裂的專題圖結果。圖4 為中樁橫斷面專題圖成果。傳統測量方法是采用全站儀和GPS-RTK 測量。對于這種山區高速公路,地勢陡峭、地形復雜,進度和精度都無法保障,同時測量過程中安全隱患大。機載激光雷達技術則是通過激光穿透植被,獲得高密度的激光點云,生成高精度的數字高程模型,最后通過相關專業軟件提取中樁、橫斷面地面高程,如圖5 所示。

圖4 中樁橫斷面專題圖成果

圖5 通過數字高程模型提取中鮊、橫斷面高程
5 結語
綜上所述,機載激光雷達采用激光主動測量,克服植被陰影的影響,對天氣條件相對寬松,數據成果直接滿足公路詳測與施工圖設計要求,不僅保證了工程數量的準確性,更加保證了工程造價可控,從而減少變更設計。文章當中的項目主要說明了輕型機載激光雷達航測技術在我國公路勘測過程中的案例分析。這一新型的技術與傳統的勘測技術相比具有較強的優勢,并且能夠在南方森林較為濃密的地區,更好地了解當地地形,。對以往所不能勘測到的區域都能更好地進行建模了解。獲取到的數據準確性也要更高一些,同時最終的施工圖紙設計斷面成果也能得到有效提取,通過這樣的方式進而實現了勘測一體化的工作要求,為我國公路勘測行業的發展奠定重要基礎。