一種桿類維修和清潔爬桿機器人設計
2022-10-26 07:06:38王偉WANGWei李雄LIXiong符國通FUGuotong
價值工程 2022年29期
王偉 WANG Wei;李雄 LI Xiong;符國通 FU Guo-tong
(湖南工業大學機械工程學院,株洲 412007)
1 研究背景及其意義
隨著現代城鎮經濟和建設現代化的進程步伐不斷地快速發展,城市建筑物中隨之出現了許多具有美觀性的如各種建筑路燈桿、電線桿、廣告牌立柱及各種鐵路大橋鋼索柱體等建筑桿件物體(圖1),它們常年地裸露在空氣中,因逐漸受到了大量強酸性物質的腐蝕,縮短了使用壽命,影響著其外表美觀,所以對于它們就需要人工進行定期檢查和清洗及維護。但在目前的高空維修作業領域普遍存在高空勞動強度系數偏大、效率又偏低、危險性還大、成本也太偏高等問題。

圖1 各種建筑桿件物體
目前,為了克服清洗維護桿件這一難點,多選擇的清洗方法,主要是采用水槍加壓去漬法、人搭坐車梯除污法和人坐吊籃除污法。盡管采用水槍加壓的方法對于桿上污漬的清洗有一定的成效,但是這一方法也存在不足之處,如水槍加壓清洗需要持續的水供應,造成水資源的浪費,產生的成本較高,同時由于水噴射中高度過高而導致速度大大減小,因此只能處理矮桿,對于高的桿件難以清洗。分析之后可以十分清楚地看出,這種利用在高空進行自動清掃作業的升降平臺進行自動的清洗、檢測及檢查和維修金屬桿件的方法也都有高成本,低效率,高風險三個主要缺點。研發這樣一款可以攀爬的高空桿件機器人來完成日常維護清潔相關工作便可以很好地來代替傳統的人工攀爬方式,從而實現了維護和清潔成本的大大節約,同時工作效率也有明顯提高。
2 爬桿機器人的整體結構說明
此機器人由上下兩組夾緊松開機構和蘇格蘭軛傳動機構組成,通過減速電機帶動曲柄及頂件進行運動,實現機器人的爬桿動作。整體結構如圖2所示。
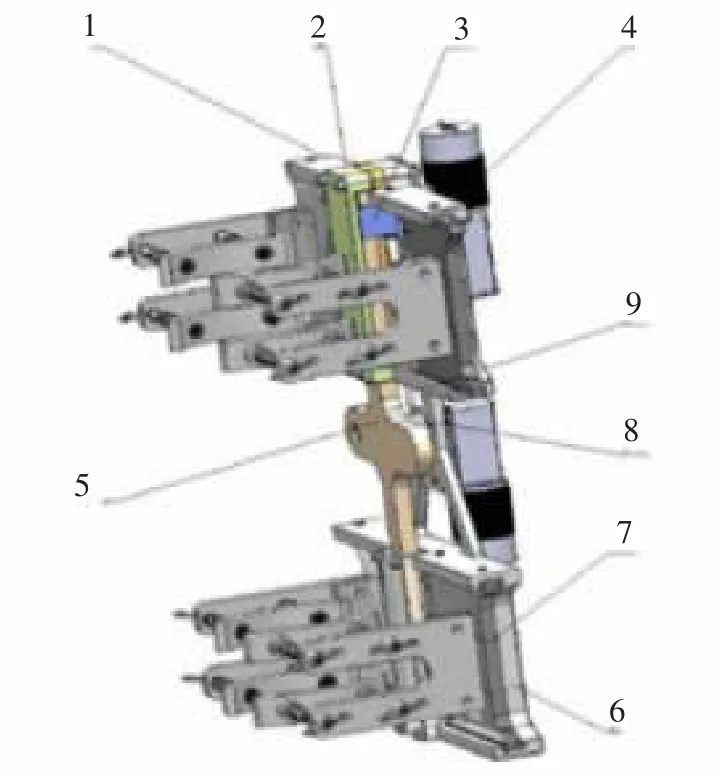
圖2 爬桿機器人總裝圖
3 運動方案的選擇
為了使機器人能夠靈活地在桿件上下運動,就必須有兩個功能,一是貼附功能,二是移動功能;而貼附的方式大多由吸附方式和夾持方式這兩種方法實現,移動方式有輪式移動、履帶式移動、蠕動式和腿式移動的方法。爬桿型機器人的整體外形的設計往往會因各種作業環境場景要求和實際操作活動對象特性有所不同,因此對于其的移動及固定放置方式設計選擇方面與機器人在貼附與安裝等方式的設計方式上進行的設計合理度選擇等方面同樣可能存在著與其他行業諸多技術因素差異。通過廣泛研究與對比分析現有機器人各類機械移動的方案和機器人的貼附式移動固定方案,本型機器人的設計和方法主要模仿尺蠖的爬行與運動的步態模型設計出發,結合現有機器人的夾持式機械的貼附移動固定的方式和與蠕動式的機械移動結合的固定方式,組合成具有結構緊湊、操縱容易、負載驅動能力強、穩定性能好、對不同大小立桿適應能力強的爬桿類機器人。
4 夾緊與松開方案分析
夾緊和松開機構是爬桿智能機器人附著在桿上的重要內部結構。爬桿智能機器人不僅要具有一定負載綜合能力,還應該滿足爬桿智能機器人對桿的一定適應能力。圖3顯示了攀爬機器人上部夾緊機構和抱爪結構的三維相關模型。上部夾緊機構和松開機構應由夾爪、上曲柄、上頂件、雙向移動滑軌等組成。兩個上夾緊板借助四個雙向移動滑軌與上安裝架連接,并且橫向可以左右相互移動。此外,上方左右兩塊夾緊板通過軸承連接可以變滑動摩擦為滾動摩擦,從而減輕上頂件與夾緊板移動槽的磨損。兩個滑軌間歇水平位置移動,以完成爬桿智能機器人的夾緊和松開動作。同時,為了適應不同范圍大小的直徑桿,采用半月抱爪,在半月抱爪上貼附一定摩擦系數的橡膠材料,使得有一定的防滑能力和保護桿件的作用。攀爬智能機器人夾緊和松開動作完成的機理如下:上部直流減速電機5號驅動曲柄在上頂件的凹槽中移動,上部蘇格蘭軛機構開始工作,上頂件在曲柄的驅動下沿直線上下運動。上頂件上部的滾針軸承在上夾板的凹槽中移動,將豎直運動轉化為上夾緊板在上安裝架上的橫向運動,完成爬桿機器人的夾緊與松開動作。
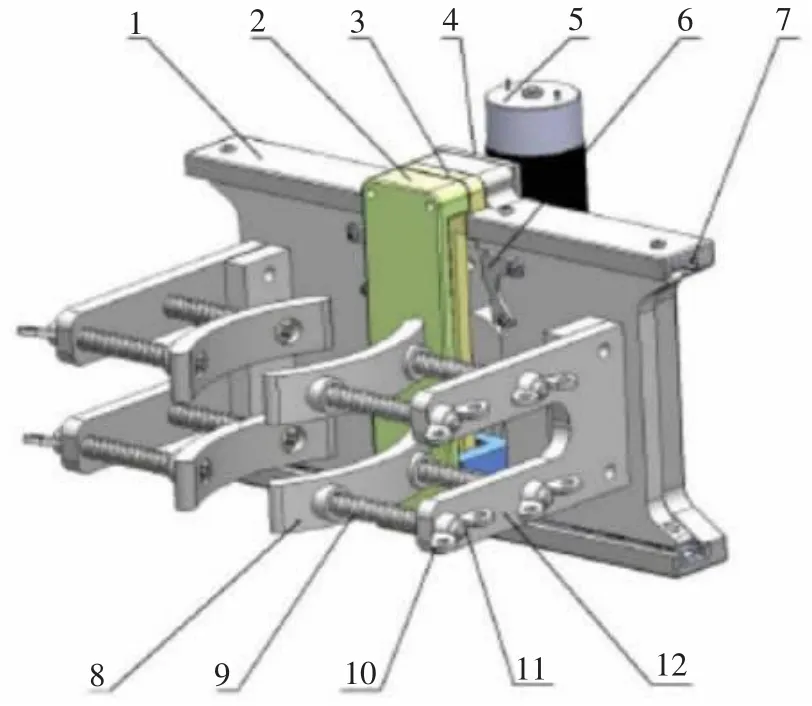
圖3 爬桿機器人上部夾緊機構和抱爪機構
5 傳動方案設計
傳動系統作為現代爬桿式機器人發展兩個重要的分支組成的關鍵之一,需要系統將來通過自旋逆轉使電機轉子發出強大的控制伺服機械力來直接通過傳動元件分配作用到構成整個的爬桿式機器人體系中的各個主要機械的執行系統構件。通過模仿尺蠖人的爬行步態而完成爬桿式機器人步態的設計,即尺蠖雙前足松開后雙足抱緊,上軀干前伸,然后前雙足抱緊,后雙足松開,后軀干向上伸,實現向上移動。根據對該步態機器人的初步設計研究和設計方案,采用了蘇格蘭共軛往復機構來設計作為爬桿式機器人的某一特定主要的機械及傳動或輔助控制構件。蘇格蘭軛機構可以將曲柄的旋轉運動轉換為軛的直線運動。如圖4為傳統的蘇格蘭軛機構圖和三維圖。
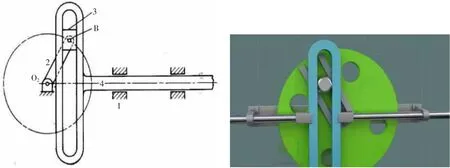
圖4 傳動方案設計
由圖可知,在曲柄旋轉的過程中,頂桿4的總行程是曲柄2長度的二倍,因此針對蘇格蘭軛的傳動方式和結構特性,來設計爬桿機器人的關鍵傳動機構,采用的這種蘇格蘭傳動軛機構除能更有效可靠地實現對爬桿型機器人更為平穩且更加有效和可靠的傳動設計外,更能夠真正實現將垂直且平行于桿件方向上移動方向的機械結構進行優化處理并避免使位于該運動方向上移動的機械結構顯得過于龐大臃腫。
6 爬行桿件及變直徑桿分析
目前國內大部分小區和繁華街道的附近多采用下邊大上邊小這種分段式的圓柱桿,桿件的長度也多半低于10m,下部桿直徑大約為150mm,下桿安裝的總高度大多在約1.4m或以下,連接著頂部安裝的法蘭盤。上桿則是采用直徑約為75mm的等直徑桿,其中在頂部安裝監控。對于等直徑桿,研究對象為直徑大小為150mm和75mm的桿件。然而變直徑桿件,比如以路燈桿的錐形桿為例,考察知道變徑路燈的整體錐度要求在1:100以內,若爬桿工業機器人要在上述類型桿件自由上下爬行,則必須突破爬行變長直徑桿件搭設上的障礙,以增強爬竿自動化機器人對該類型桿件搭設的適應性,方可在該類型桿件搭設上正常完成作業。故對于變直徑桿取桿的長度為5m,小端直徑為60mm,大端直徑為140mm。
關于變直徑桿件進行夾緊的這一技術問題,使用柔性的夾緊機構可以有效地解決。爬桿夾機器人中的半月抱爪夾緊模塊結構如圖5中所示。由于對于小徑處會導致抱爪片與爬桿件的有效接觸面積減小,故要在半月抱爪和抱爪安裝板座之間另加裝一個預緊彈簧,用于支撐和位置調整,同時在半月抱爪與桿座接觸部的外表面處加裝用于增加與安裝桿件表面摩擦量的橡膠片,加大彈簧摩擦系數,橡膠材質柔軟,還起到保護桿件不受損害的作用。在爬桿機器人第一次在桿件上安裝時,可以通過調節預緊螺栓彈簧初始變形,從而使得半月抱爪和桿的位置可以調節,來增強爬桿機器人在變直徑桿件表面的爬行和適應安裝的工作能力。
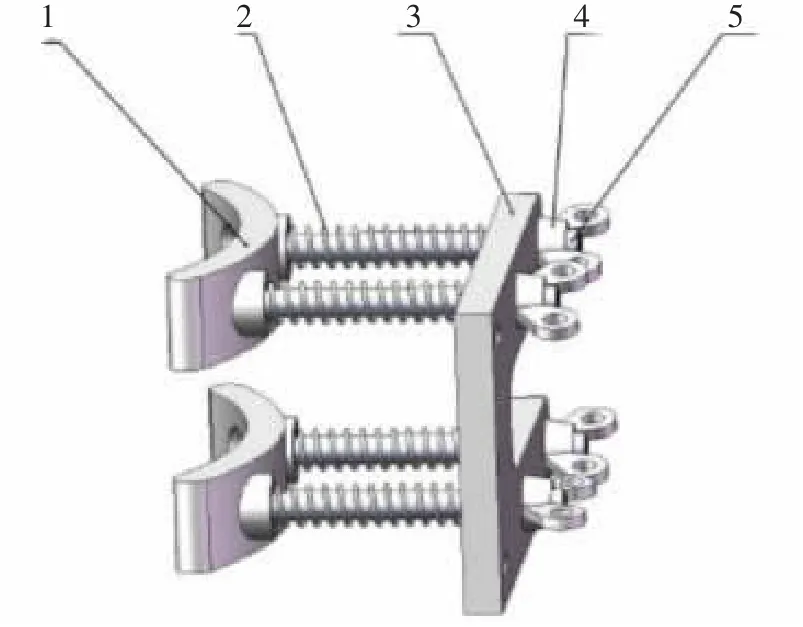
圖5 半抱爪夾緊模塊結構
7 結論
爬桿機器人采用夾持式貼附方式與蠕動式移動方式并通過蘇格蘭軛機構作為傳動機構,完成爬桿機器人上下抱爪交替夾緊-松開,以蘇格蘭軛機構曲柄兩倍長度為一個行程向上攀爬。同時,對于變直徑桿問題,采用柔性抱爪解決這一問題,通過預緊彈簧調節抱爪與桿之間的接觸,從而來提高爬桿機器人的適應能力。
