一種混流式機組的大軸中心調整方法
2022-10-25 05:27:34王佩,王超
水電站機電技術 2022年10期
關鍵詞:方向
王 佩,王 超
(1.五凌電力有限公司,湖南 長沙 410004;2.湖南省水電智慧化工程技術研究中心,湖南 長沙 410004)
1 概述
水輪發電機是一個由水能轉換為旋轉機械能,又由旋轉機械能轉換為電能的機器。在水輪機組的運轉過程中,如果水輪機轉軸中心不正,可能造成機組導軸承軸瓦局部間隙偏小,從而導致軸承瓦溫度過高、機組振動幅度過大、機組部件磨損等一系列問題,給機組的安全穩定運行帶來嚴重的威脅。在混流式水輪機組的檢修過程中,因為檢修作業等各種因素的影響,大軸中心的位置可能發生偏移,具體體現在迷宮環的間隙不合格,根據三板溪電廠機組設計規范,機組的迷宮環間隙應不超過平均間隙。因此,在檢修過程中,需要定時測量迷宮環的間隙,如果發現大軸中心發生偏移,必須對大軸中心位置重新調整,從而確保檢修質量。
2 傳統的大軸中心調整方法及其出現的問題
在檢修過程中,如果檢測時發現迷宮環間隙不合格,可以先基于測得的數據,判斷大軸的主要偏移方向及偏移量,再將相應位置的下導軸承瓦抱瓦的條件下,通過百分表的監測,敲擊下導軸承瓦的調整楔子板,將下導軸承瓦推動需要調整的量,其中,抱瓦指的是大軸與軸承瓦處于剛好接觸的狀態,具體操作為敲擊楔子板使軸承瓦靠近大軸,直到監測的百分表讀數為0.01 mm,表示軸承瓦與大軸恰好貼合。然后,再通過頂轉子油泵將大軸頂起,使大軸在重力的作用下自由落下,在下落的過程中,大軸在下導軸承瓦的限制下發生偏移,從而將大軸中心調整到合適的范圍內。
在三板溪水電廠1號機組檢修過程中,測得上、下迷宮環的間隙值如表1所示,其中,上、下迷宮環各測點的位置如圖1所示。對上、下迷宮環間隙測量值分析可知,大軸的中心發生了偏移,主要的偏移方向為6號測點方向,其中上迷宮環在2號測點方向與平均值的偏差為0.35 mm,在6號測點方向與平均值的偏差為-0.4 mm,即上迷宮環在2號~6號測點方向與平均值的總偏差為0.75 mm,同理,下迷宮環在2號~6號測點方向與平均值的總偏差為0.92mm,總偏差值的一半即為大軸中心的偏移量,綜合上、下迷宮環間隙數據可知,大軸中心向迷宮環6號測點方向的偏移量約為0.4 mm。調整過程為,通過百分表的監視,將6號測點對應的2號和3號下導軸承瓦在抱瓦狀態下推動40絲,即將大軸中心往2號測點方向回調0.4 mm,其中,三板溪電站下導軸承瓦的編號位置如圖2所示。調整后,測得上、下迷宮環間隙如表2所示。經計算可知,調整后的大軸各方向的偏差均在允許誤差范圍內,滿足機組安全運行的要求。
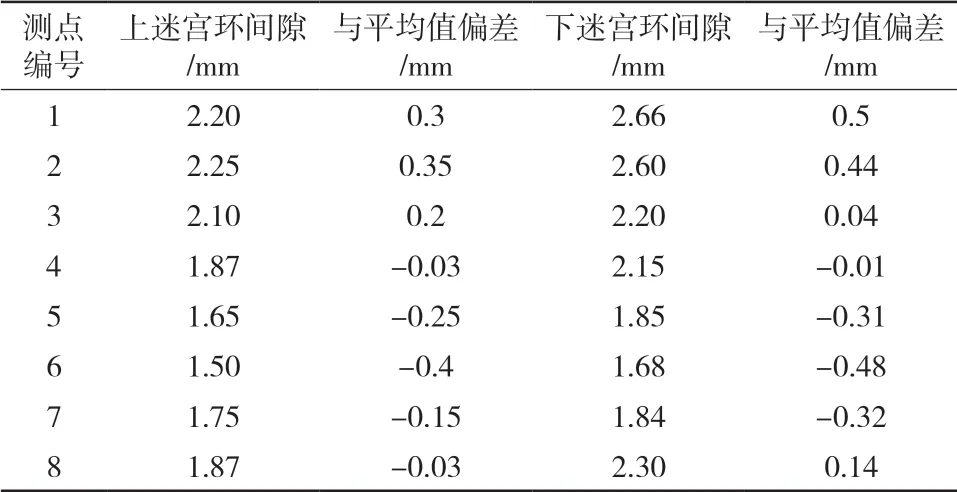
表1 迷宮環各測點間隙測量值
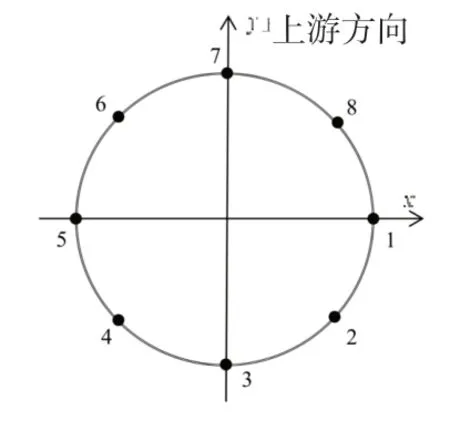
圖1 迷宮環測點編號位置
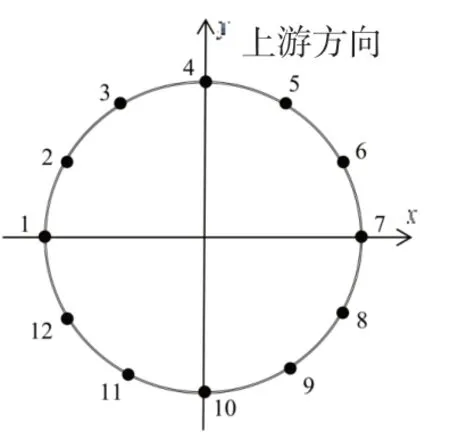
圖2 下導瓦編號位置
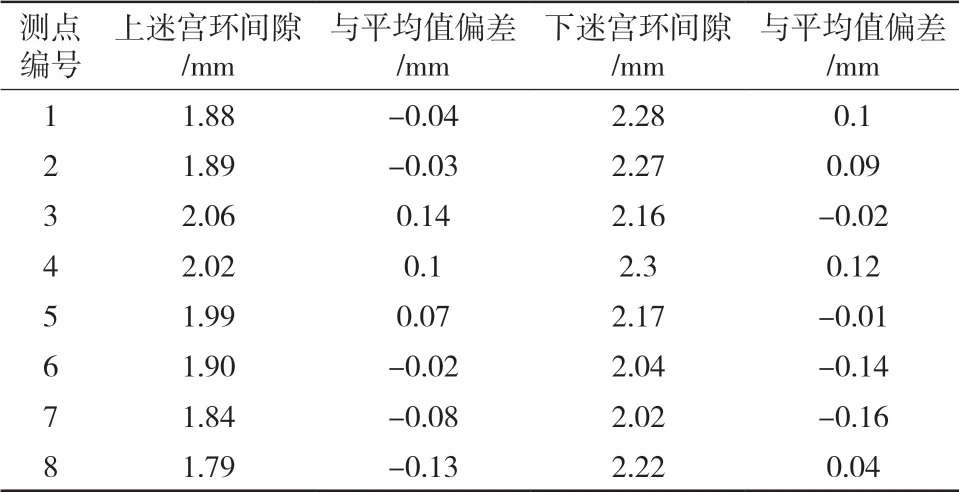
表2 調整后迷宮環各測點間隙測量值
但是,在未進行任何作業的前提下,第2 d復測時,卻發現大軸中心又出現了一定的偏移,超出了允許的偏差范圍,按照前文所述的方法重新調整合格后,在第3 d復測時發現,迷宮環間隙再次發生了變化,所測得的迷宮環間隙如表 3 所示,根據計算結果分析可知,第3 d的復測結果雖然勉強滿足了10%的允許偏差要求,但是大軸中心與調整后的數值相比出現了明顯的偏移。
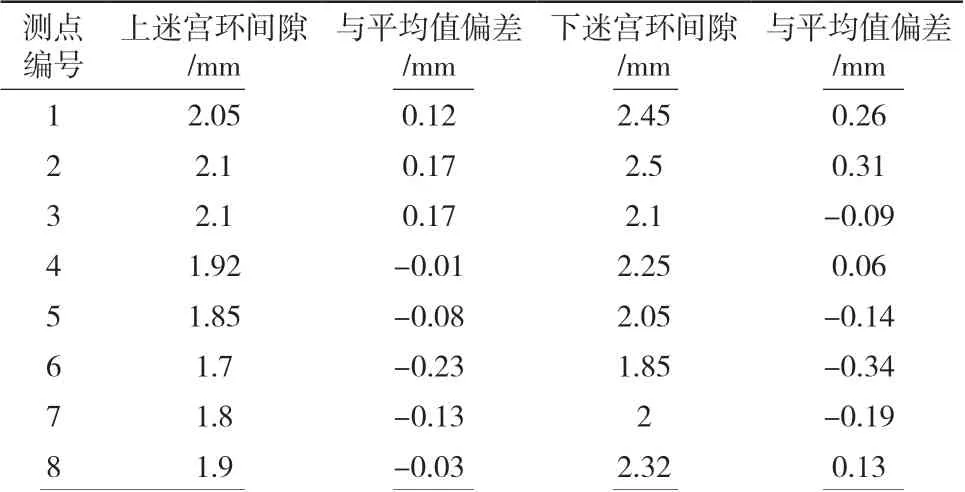
表3 調整后迷宮環各測點間隙測量值
3 傳統調整方法缺陷分析
對大軸中心調整一段時間后,迷宮環間隙將發生變化的原因進行分析得知,傳統的大軸中心調整方法存在以下缺陷:在用下導軸承瓦推動大軸時,大軸的受力方向與其重心并不在同一水平線上,因此,大軸在力矩的作用下會存在一定量的傾斜,從而造成推力軸承受力不均,使得推力軸承的彈性油箱發生變形,而當大軸在自重的作用下落到最低點并在下導軸承瓦的限位下完成中心調整過程以后,作用在大軸上的力矩消失,彈性油箱開始恢復,然而,彈性油箱的恢復并不是即時的,因此,雖然在調整完成后測得迷宮環的間隙合格,但是,大軸中心在彈性油箱的恢復過程中將發生變化,從而導致第2 d復測時迷宮環間隙不合格。此外,在傳統的大軸中心調整過程中,只通過一個方向的軸承瓦來推動大軸,并沒有限制大軸向其他方向的移動,因此,調整方向具有不確定性。結合表3 中第二次調整后的復測數據可知,雖然迷宮環的間隙勉強滿足了設計規范的要求,但是在將大軸中心從6號測點往2 號測點方向調整的同時,也在4 號測點往8號測點的方向出現了偏移,如果偏移量再增加也可能導致調整后的迷宮環間隙超出允許的偏差范圍。
4 改進方法提出及應用
基于傳統大軸中心調整方法存在的不足,提出以下改進方法:主要的思路是通過在上導和水導處增加輔助限位配合進行大軸中心調整,通過上導、下導和水導同時限位,可以有效的減小調整時與重心的力矩。同時,在推軸方向的兩側也增加限位,保證大軸基本只能向調整方向運動,具體的操作過程如下:假設確定的推軸方向為+X軸方向,先使-X,+Y,-Y方向對應的上導軸承瓦和水導軸承瓦處于抱瓦狀態,其中+Y,-Y方向的抱瓦位置應選擇略小于直徑并靠近-X方向,既能限制大軸中心調整過程中大軸向+Y,-Y方向發生偏移,又不會因抱瓦阻礙大軸向+X軸方向移動;然后,再按照傳統的調整方法推動-X方向的下導軸承瓦,此時,大軸在上導和水導軸承瓦的限位下既不會發生傾斜,也不會往其它方向移動,其示意圖如圖3所示。通過改進的調整方法對表3所測得的迷宮環間隙進行調整,分析可知,大軸需要往2號測點方向調整15絲,因此,先抱住上導軸承的1號、3號、10號、12號軸承瓦以及水導軸承的5號、7號、8號、10號軸承瓦,然后將下導軸承的6號軸承瓦在抱瓦的狀態下推動15絲,其中,上導軸承和水導軸承的軸承瓦編號及位置如圖4 和圖5所示。
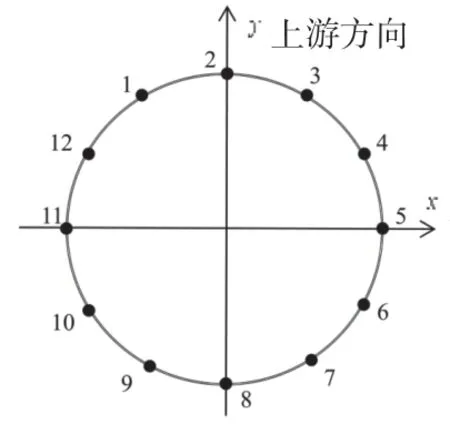
圖4 上導軸承瓦編號
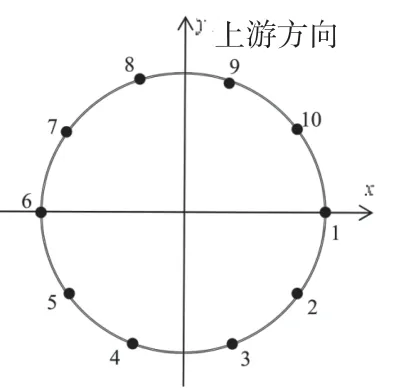
圖5 水導軸承瓦編號
經過改進的大軸中心調整方法實施后,測得數據如表4所示,分析可知,上、下迷宮環的間隙值均合格且在限制的4 號和8 號測點方向的變化量很小,同時,第2 d復測時間隙與調整后的數據基本一致,偏差僅在2絲以內,說明改進的大軸中心調整方向有效地解決了原始方法存在的問題,取得了良好的效果。
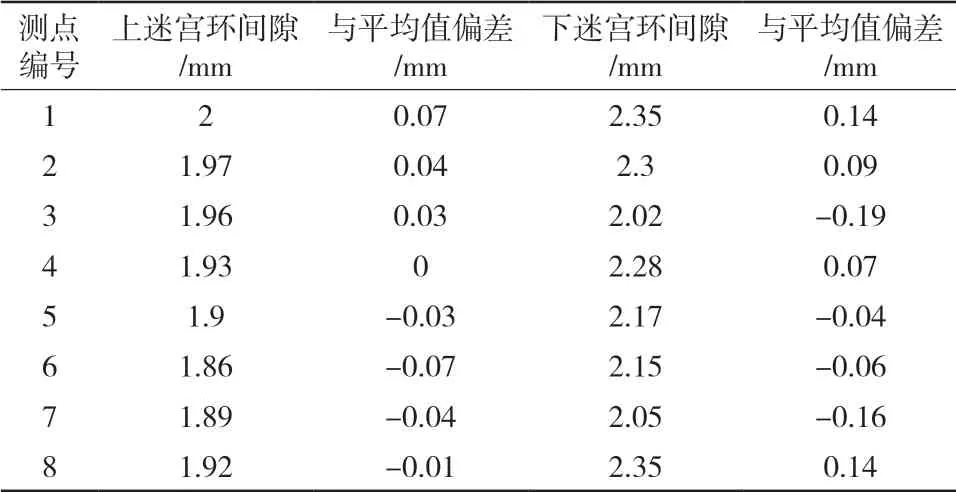
表4 最終調整后迷宮環各測點間隙測量值
5 結論
水輪機組轉軸的中心處于允許的范圍內,是水輪機安全運行的基本要求,也是確保檢修質量的前提,具有重要的意義。本文結合三板溪電廠檢修中遇到的實際問題,分析了原有的大軸中心調整方法的缺陷,并提出一種改進方法,應用結果表明,該方法避免了大軸在調整過程中可能發生傾斜以及調整方向不確定的缺陷,起到了良好的調整效果,對于縮短檢修時間,提高檢修質量具有重要的價值。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
