智慧化工園區刺激性氣體污染源定位技術
2022-10-21 14:01:28金周軍
科學技術創新 2022年30期
金周軍
(1.聚光科技(杭州)股份有限公司,浙江 杭州 310000;2.清本環保工程(杭州)有限公司,浙江 杭州 310000)
引言
智慧化工園區是一個匯集多個化工企業的重要聚集區域[1],但園區內分布著大量污染源[2],對周圍區域的環境造成嚴重的影響。隨著我國對環境保護的重視,人們對空氣質量的要求越來越高,減少其他污染排放已經成為目前的必然選擇[3]。受智慧化工園區內部組成復雜性的影響,其很難進行污染源定位[4],現存的氣體污染源定位技術也存在較高的定位偏差,因此急需設計一種新的氣體污染源定位技術。
早期相關研究人員主要使用傳感器網絡或使用粒子群算法構造污染物定位矩陣對氣體污染源進行定位,但上述方法往往定位精度較低,定位速度也相對較慢[5],經過多次分析發現,氣體污染源在進行傳播時存在多維擴散關系,因此本研究根據氣體污染源擴散現狀,構建了多維濃度擴散模型,設計了有效的刺激性氣體污染源多維定位技術,為后續智慧化工園區的環境保護提供一定的依據。
1 刺激性氣體污染源多維定位技術設計
1.1 采集刺激性污染源信息數據
為了提高刺激性污染源多維定位效果,降低定位偏差,首先需要采集準確的污染源信息數據,本研究使用上位機辨識法構建了刺激性污染氣體信息數據采集平臺[6],主要利用貝葉斯概率數學模型,可以實時驗證檢測到的信息樣本值,確定各個方位的后驗概率。本研究設計的刺激性污染源定位技術為快速地恢復傳感器靈敏度,使用陶瓷管、測量電極等敏感元件設計信息傳感電路,如圖1 所示。

圖1 信息傳感電路
由圖1 可知,該信息傳感電路可以實時監測傳感器的電導率,一旦其發生明顯變化需要立即使用內部加熱器進行處理,始終保證其獲得數據的有效性。
1.2 構建氣體污染源多維濃度擴散模型
為確定污染源方向,提高污染源定位的準確性,構建氣體污染源多維濃度擴散模型。首先,在空氣中構建一個二維坐標系,假設某時刻該坐標系中的某點釋放了一個質量為M的污染源,該污染源會持續進行擴散,此時該污染源在空氣中的二維擴散模型如式(1)所示。

公式(1)中,? 代表擴散參數,C 代表擴散初始位置,t代表擴散時間,DX、DY分別代表擴散后坐標點,x、y 分別代表擴散前污染源坐標,此時該模型必須滿足擴散初始條件V(x,y,t),如式(2)所示。

公式(2)中,δ (x)、δ (y)均代表擴散初始系數,此時可以將上述設計的擴散模型進一步優化,確定基礎擴散系數,并將擴散模型進行二次簡化,簡化后的擴散模型E 如式(3)所示。

公式(3)中,D 代表擴散系數,ξ 代表污染物排放速率,n 代表擴散效率。
由于污染物在一定的維度變化下具有一定的擴散穩定性,此時可以設計一個與該二維濃度分布圖相擬合的擴散函數erf(x),如式(4)所示。

公式(4)中,e 代表污染物擴散屬性,λ 代表擴散運動常數,d 代表擴散距離,上述污染物擴散模型屬于二維擴散模型,其只能定位一個平面中的污染源數據,但智慧化工園區屬于三維空間,因此需要構建三維濃度擴散模型提高其污染源定位的準確性,在污染源定位區域構建一個三維直角坐標系,假設某時刻投放了一個污染源,此時該污染源的三維擴散模型C0如式(5)所示。

公式(5)中,D X、DY、DZ分別代表污染源擴散前的三維坐標,x、y、z 分別代表擴散后的三維坐標,假設污染物存在擴散同向性,此時可以對該模型進行簡化處理,處理后的模型C1如式(6)所示。

使用上述簡化的模型可以成功確定污染源的方向,提高污染源定位的準確性。
1.3 設計氣體污染源定位算法
本研究使用狀態觀測法,判斷各個變量之間的關系,設計污染源定位算法,如式(7)所示。

公式(7)中,xk代表待求狀態變量,zk代表實際擴散變量,f(xk-1)代表觀測噪聲,h(xk)代表高斯噪聲,Wk、Vk均代表定位方差。
使用上述定位算法定位后,還需要對原有的污染源坐標進行更新,此時可以對原有的污染源坐標進行變換處理,其變換式W0如式(8)所示。

公式(8)中,n 代表變換維數,變換完畢后,污染源的位置與實際定位位置偏差較低,但為了判斷污染源下一步擴散效果,保證定位的動態性,需要對定位位置進行預測,預測值L 如式(9)所示。

公式(9)中,XK-1代表預測更新向量。本研究設計的氣體污染源定位技術使用質心定位法提高定位的精準性,確定污染物的探測濃度信息,得到污染物定位式S,如式(10)所示。

公式(10)中,dD代表傳感器探測節點,σ 代表污染氣體濃度檢測信息,結合該污染物定位模式,可以對找到最早確定污染物的傳感器節點,計算區域定位質心,再使用結合解析法進行求解。
2 實驗測試
為了驗證本研究設計的刺激性污染源多維定位技術的定位效果,本研究搭建了相關的實驗平臺,將其與常規的污染源定位技術對比,進行實驗。
2.1 實驗準備
本研究選取A 智慧化工園區進行污染源分析,經過檢測發現,該智慧化工園區共存在54 種氣體污染類型,為了提高實驗的敏感性,降低實驗誤差,本研究選取LUGB 氣體傳感器進行實驗。
傳感器放置的位置需要與智慧化工園區內的空間特質相擬合,為了避免實驗的隨機性,可以將A 智慧化工園區劃分成若干個不同的區域,隨機向各個區域投放數量相等的測試傳感器,再根據各個區域的濃度規定氣體源特質,排除顫動干擾,此時各個測試區域的傳感器節點數量與收斂效果如圖2 所示。

圖2 收斂變化示意圖
由圖2 可知,隨著傳感器節點的增加,SOURCE和MLE 的變化趨勢不同,為了降低實驗偏差,本研究使用了AND 財務處理軟件,將采集到的處理信息利用Sink 點進行處理,直至誤差低于實驗允許誤差。
污染源數據處理完畢后,可以將其輸入到MP426數據儲存芯片中,再使用LabVIEW 平臺判斷氣體傳感陣列,此時可以根據污染源與測試節點的關系,規劃5 組不同方向的測試污染源,這些污染源的均值向量參數如表1 所示。
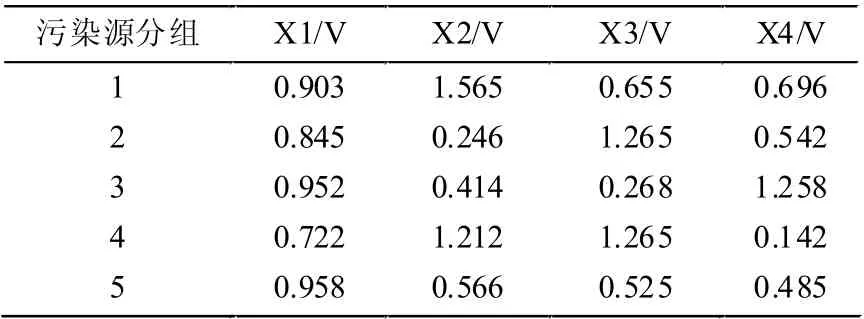
表1 污染源參數
結合表1 的污染源參數,可以設計污染源定位偏差計算式P,如式(11)所示。

公式(11)中,D 代表定位范圍,D0代表實際定位點,G代表定位參數,若該定位偏差值低于0.5,則證明定位的污染源位置與實際污染源位置偏差較小,反之則證明偏差較高,按照上述規定的污染源參數可以得到定位污染源角度,將其與實際的污染源位置比照,判斷實驗的可行性,污染源角度比照結果如表2 所示。
由表2 可知,使用上述參數規劃的污染源角度與實際污染源角度相擬合,符合實驗需求,可以進行后續的污染源定位分析。
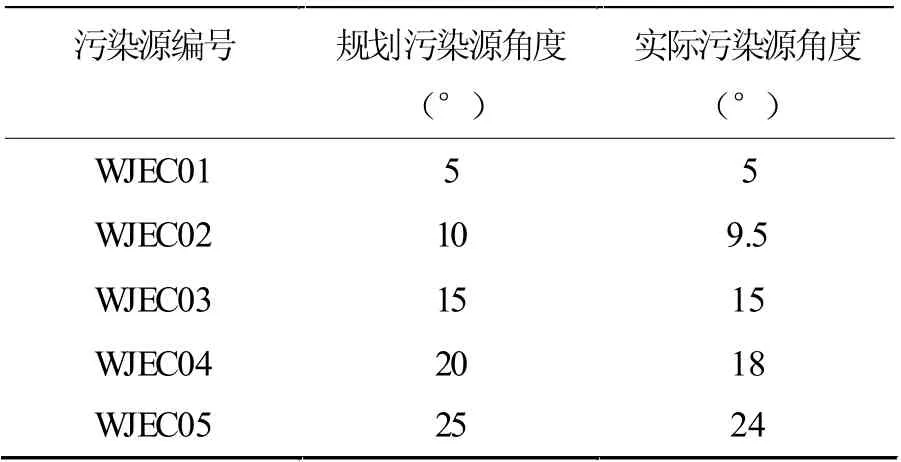
表2 污染源角度比照
2.2 實驗結果
結合上述的實驗架構及實驗環境,使用規劃的污染源進行污染源定位實驗,即分別使用本研究設計的刺激性氣體多維污染源定位技術及常規的氣體污染源定位技術進行定位,計算兩種技術的污染源定位定位偏差,實驗結果如表3 所示。
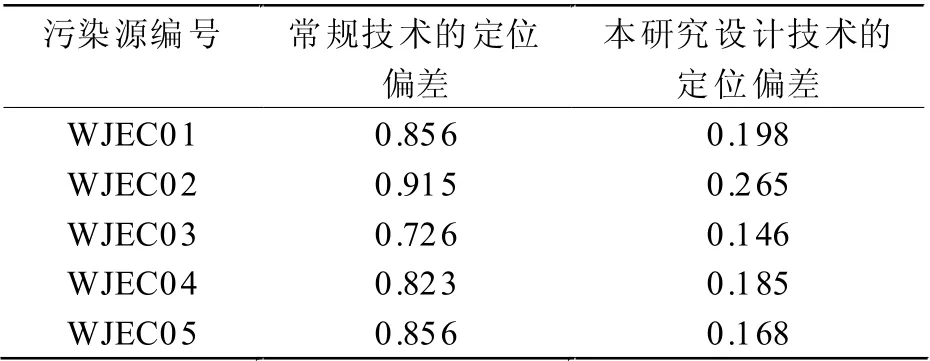
表3 實驗結果
由表3 可知,本研究設計的刺激性污染源多維定位技術的污染源定位偏差均低于標準定位偏差值0.5,證明其定位的位置與污染源實際的位置相近,定位偏差較小;常規的刺激性污染源定位技術的定位偏差值高于標準定位偏差值,其定位偏差較大;證明本研究設計的刺激性氣體污染源多維定位技術的定位精度較高,定位效果較好,符合智慧化工園區的污染源定位需求。
3 結論
綜上所述,智慧化工園區是一種集多種工業化進程為一體的特殊工業生產區域,其內部釋放污染氣體總量較高,嚴重影響了周邊的生態環境,因此急需進行氣體污染源定位。常規的氣體污染源定位技術的定位偏差較高,不滿足智慧化工園區需求,因此本研究設計了一種新的氣體污染源多維定位技術,實驗驗證可知,設計的氣體污染源技術的定位偏差較小,定位精度較高,具有一定的應用價值,可以為后續智慧化工園區生態環境建設作出一定的貢獻。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
小天使·一年級語數英綜合(2014年6期)2014-07-22 23:32:38
智慧與創想(2013年7期)2013-11-18 08:06:04
