基于地磁信息的高速自旋飛行體轉速測量法*
2022-10-19 02:54:44趙文江劉中戚文昊
傳感技術學報 2022年7期
趙文江劉 寧*蘇 中戚文昊
(1.北京信息科技大學高動態導航技術北京市重點實驗室,北京 100192;2.北京信息科技大學現代測控技術教育部重點實驗室,北京 100192)
高速自旋飛行體是在飛行過程中繞其中心軸高速旋轉的一類飛行體,例如炮彈、火箭彈和自旋導彈等,由于其高速自旋運動能夠消除飛行體自身的各種不對稱偏差、提高射擊精度,因而得到了廣泛應用[1]。
高速自旋飛行體的轉速測量對其研究具有重要意義。以制導炮彈為例,其轉速信息是實現制導與控制的基礎,同時其滾轉角速率的獲取也是其進行滾轉姿態角解算的重要條件[2]。在國內外有關轉速的研究中,常用的轉速測量方法有加速度計法、太陽方位角傳感器測試法、星光姿態定位法、高速攝影法、陀螺儀法以及磁通門式地磁姿態測量法[3]。考慮到高速自旋飛行體在轉速測量過程中所處的高振動、高沖擊等惡劣的測量環境,同時還需滿足測試器件體積小、可靠性高的設計要求,故本文選擇應用磁阻(MR)傳感器技術的地磁傳感器法。
目前,磁阻傳感器技術已經能夠生產出可以安裝在高速自旋飛行體上的設備,這些設備不僅滿足了小巧、堅固而且靈敏的特點,還能夠高速、高分辨率地測量數據[4-5]。與測量轉速的傳統傳感器相比,磁阻傳感器具有可無源傳感、體積小、可靠性高、靈敏度高、功耗低、成本低等優點,能夠實現高速、高分辨率的轉速測量[6-7]。
在應用地磁信息推導轉速的方法中,利用低成本磁阻傳感器進行轉速測量的方法雖然能實現轉速測量[8],但其方法局限于低轉速測量的范圍,無法實現變化范圍較大的轉速測量;中北大學的研究人員[9]提出的基于Hilbert算法的轉速信號瞬時頻率分析法,屬于事后處理方式,在工程實踐中難以保證轉速測量的實時性;南京理工大學的研究人員[10]提出的用可以在任意角度安裝的單軸地磁傳感器來測量轉速的方法,在高轉速情況下,其算法在每個周期采集數據較少,從而導致誤差較大;在低轉速情況下,其測量原理的不足則會導致解算精度較差。
考慮到各測試方法的不足之處,提出了一種基于地磁時域標量歸一信息的轉速在線測量方法。通過對飛行體內部地磁傳感器獲取的地磁信息進行處理計算,從而得出飛行體的實際轉速,可穩定地實現對高速自旋飛行體全程轉速的有效測量。
1 地磁傳感器測量原理
地磁傳感器的基本結構是由三個在三維空間中相互正交安裝的線圈組成(圖1),三個線圈X1、Y1、Z1稱為磁感應傳感器的敏感軸[11-12]。

圖1 磁感應線圈的分布
飛行體在飛行過程中,敏感軸高速旋轉切割磁感線,使傳感器磁通量發生變化,導致其內部的地磁傳感器受到地磁影響發生周期性變化,從而產生周期性變化的地磁信息[13]。地磁信息的變化反映了高速旋轉飛行體在飛行過程中的轉速變化過程[14]。
建立如圖2所示的東-北-天坐標系,XOY平面平行于大地水平面,三個坐標軸X軸指向東方,Y軸指向北方,Z軸與地表垂直指向空中。假設圖2中的地球磁場在地面附近且為均勻磁場,磁感應強度為B,其方向水平向右且平行于OY軸,地磁傳感器繞旋轉軸旋轉的角速度為ω,由電磁感應定律可知,當飛行體在磁場中旋轉,其內部地磁傳感器切割磁感線產生的磁通量為


圖2 地磁傳感器工作示意圖
產生的感應電動勢為

令Em=NBSω,代表地磁傳感器線圈平面與磁場方向保持平行時的感應電動勢,則

式中:S為線圈面積;B為磁感應強度;N為線圈匝數;ω為飛行體角速度;α為飛行體中心軸與XOY面的夾角;β為飛行體中心軸在XOY面的投影與OY軸的夾角。
由地磁傳感器的工作原理可知,其獲取的地磁信息的波形是周期性變化的正弦波。歸一化后的正弦波所經過的波峰、波谷和零點為正弦波的特征點,通過計算各個特征點的時間差,就可以推導出飛行體的轉速[15],最終實現全程轉速的測量。
2 轉速測量法具體實施步驟
2.1 初始地磁時域標量信息歸一化
首先接收初始地磁時域標量數據信息,在接收的數據集合m0中找到首個極大值和首個極小值,并劃定初始窗口w0的時間范圍為

式中:t0max為數據首個極大值出現的時間點,t0min為首個極小值出現的時間點。由于飛行體在飛行過程中旋轉周期會逐漸變大,故在窗口w0時間范圍內歸一化后的數據曲線中至少包含有兩個零點。
然后對窗口w0內數據進行歸一化處理。在w0范圍內求出地磁信息的最大值w0max、最小值w0min以及平均值w0ave,通過計算得出窗口w0中歸一化處理后的數據,得出

其流程圖如圖3所示,其中m0(i)表示初始地磁時域標量信息m0中第i個數據。

圖3 初始地磁時域標量信息歸一化流程圖
歸一化后的地磁信息圖如圖4所示。
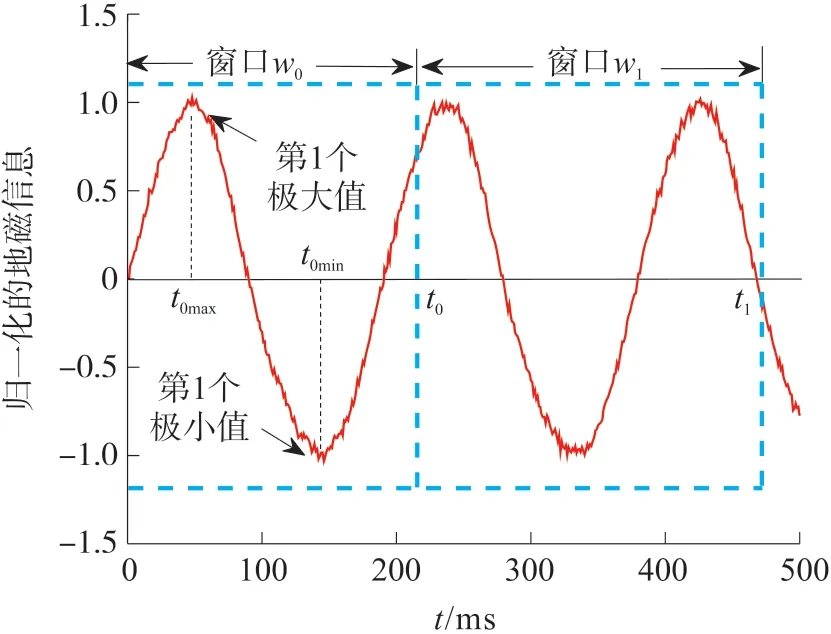
圖4 歸一化后的地磁信息圖
2.2 轉速動態測量原理
地磁時域標量歸一化后的正弦曲線如圖5所示,t0和t1分別為正弦曲線經過特征點的時間點。由于地磁信號的采樣頻率固定,因此正弦曲線是一條由許多離散點構成的曲線,且每個離散點之間的時間間隔是固定的。考慮到采樣到的點不一定是正弦曲線的特征點,而且相較于波峰、波谷附近的特征點,零點附近的特征點更容易被區分,因此選擇零點作為數據分析的特征點,從而減小采樣所帶來的誤差,更準確獲得高速自旋飛行體的轉速。
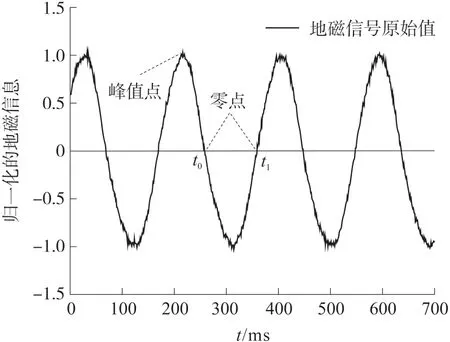
圖5 地磁信號正弦曲線
判斷點tn是否為零點的方式為:取tn左側和右側的相鄰時間間隔采樣點的數據值相乘,若得出的結果為負值,則tn為零點。
通過計算窗口wi中圖像經過相鄰兩個零點tin和ti(n+1)所經歷的時間,可以得出n時刻正弦波的周期:

彈體轉速Rin:

以此類推,即可計算出當前窗口wi內每一時刻的正弦波周期Tin和彈體轉速Rin。同時,考慮到零點附近會出現數據波形抖動,從而計算出異常轉速值的情況(正常情況下轉速區間為-30 r/s至300 r/s),當兩個零點距離過近,導致計算結果異常時,則將此組零點刪除以達到刪除異常值的目的。
由于彈體在飛行過程中轉速會逐漸變慢甚至反轉,因此將下一窗口wi+1的時間范圍設定為λ/Rin(λ取值由試驗需求決定),λ為比例系數,即下一窗口wi+1的時間設定范圍是當前窗口wi內的最后一組零點所計算出的相應周期的λ倍,以此確保當高速自旋飛行體轉速變化范圍較大時,在wi+1的時間范圍內至少包含有一個正弦周期,從而達到正常計算轉速的目的。再對wi+1范圍內的數據進行歸一化處理,由此得出:

式中:Qi+1為處理后的數據值;mi+1為wi+1范圍內數據的原始值;wiave、wimax和wimin分別為wi范圍內數據的平均值、極大值和極小值。
即通過wi內最后一組零點計算出的周期Tin和轉速Rin來設定wi+1的時間范圍,并在wi+1設定的時間范圍內用上一窗口內的數據極大值、極小值和平均值對在線接收到的地磁時域標量數據進行動態歸一化處理,并計算窗口內每兩個零點之間的周期T(i+1)n和轉速R(i+1)n,從而達到實時測量轉速的要求,同時以窗口內最后一組零點計算得出的周期和轉速來設定wi+2的時間范圍,依此類推,直至所有數據計算完畢,最終完成基于地磁時域標量歸一信息的轉速在線測量。轉速測量流程圖如圖6所示。
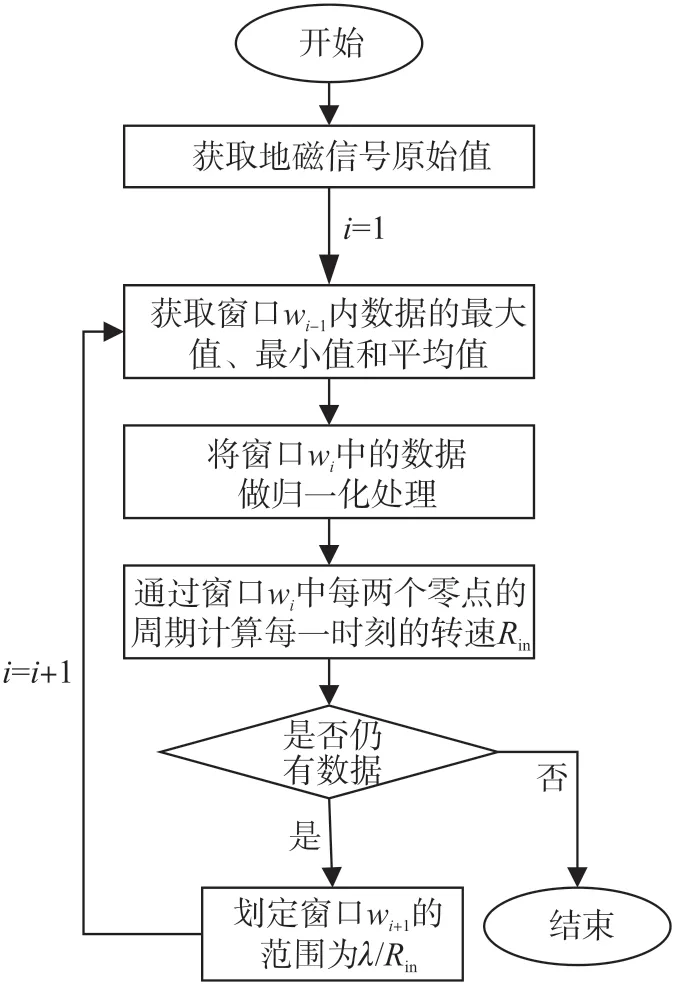
圖6 轉速測量流程圖
3 試驗驗證
3.1 地面模擬試驗
為驗證本文轉速測量法的精度,將地磁傳感器放置在三維轉臺上進行精度測量試驗(根據本試驗需求,λ=3)。在測試時間內,分別對轉臺設定三組不同的轉速值,采集地磁傳感器收集的數據。測量模塊包含地磁傳感器、信號調理電路模塊、AD轉換電路模塊、STM32控制電路模塊和儲存器模塊。
其中,信號調理電路模塊的作用是將地磁傳感器輸出的量程為mV級別的電壓信號進行放大處理,從而能夠正常進行A/D轉換;儲存器模塊則用于存放采集后的數據,以便后續在上位機中分析使用。轉速測量系統框圖如圖7所示。
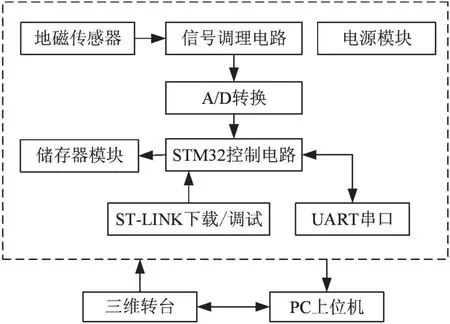
圖7 轉速測量系統框圖
將地磁傳感器固定在轉臺上,設定好轉臺轉速,并啟動轉臺。測試結束后將轉臺上地磁傳感器的測量數據通過本文所述的測量法進行轉速計算,并與轉臺設定值進行比較。測試過程一共為60 s,每經過20 s改變一次轉臺轉速。轉速設定值分別設定為5 r/s、10 r/s和20 r/s,通過計算出的轉速與設定值之間的對比,即可驗證轉速測量法的精度。本文所用的地磁傳感器和三維轉臺實物如圖8所示。

圖8 地磁傳感器和三維轉臺實物圖
轉速設定值與計算結果對比曲線如圖9所示,轉速精度誤差曲線如圖10所示。

圖9 轉速設定值與計算結果對比曲線
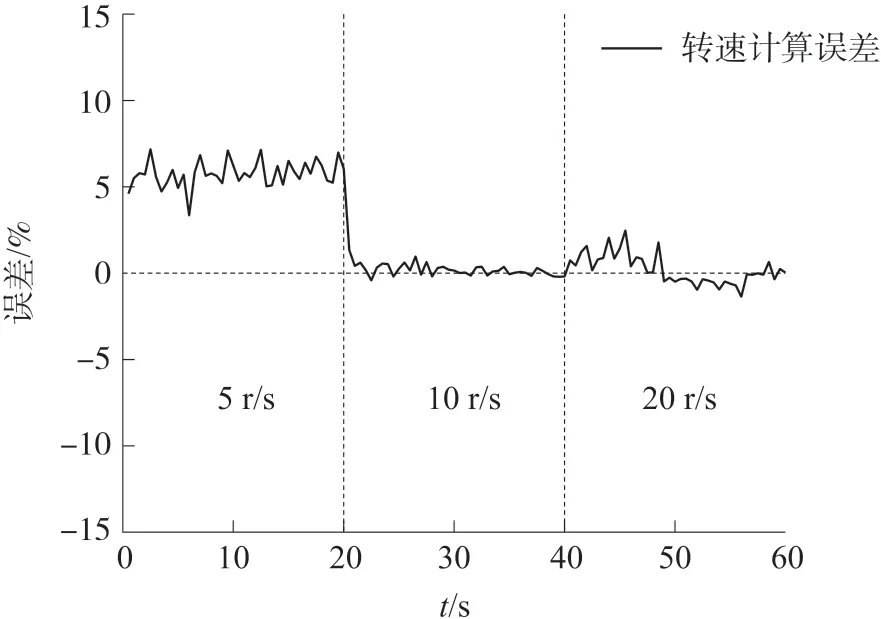
圖10 轉速精度誤差曲線
表1給出了A、B兩套裝置的轉速考核數據,為了降低地磁傳感器帶來的誤差,A、B兩套裝置分別選用了不同型號、相同精度的地磁傳感器。在三維轉臺上分別對每套裝置設定了三組轉速值:5 r/s、10 r/s、20 r/s,并計算出其中的均方根誤差(RMSE)和最大誤差。

表1 系統轉速測量數據對比
由表1可以看出,這兩套裝置經過計算得出的轉速最大誤差在8.2%內,與轉臺實際轉速值基本一致。在低轉速時,相較于最大誤差超過10%的用可以在任意角度安裝的單軸地磁傳感器來測量轉速的方法,本文提出的轉速測量法的精度更高。同時,由于地磁測量結果受裝置精度影響,且轉臺本身也存在一定誤差,這些因素都會影響計算結果。因此可以得出,實際轉速測量法的誤差要低于驗證仿真試驗的誤差。
3.2 實物飛行試驗
以某小型高速自旋飛行體為例,其飛行過程中最高轉速在100 r/s~200 r/s之間。采集安裝有地磁傳感器的飛行體飛行數據后,按本文所示方式進行解算,其從發射到落地的部分地磁信息原始測量值如圖11所示,轉速計算結果如圖12所示。由圖12可以看出,該小型高速自旋飛行體飛行過程中最大轉速為156 r/s,且由最高轉速到最低轉速的時間為13 s,所得結果基本符合飛行體實際轉速值。

圖11 高速自旋飛行體部分地磁信息原始值

圖12 轉速計算結果示意圖
4 結論
本文針對高速自旋飛行體轉速變化范圍大,且難以有效測量的問題,在分析了當前轉速測量法的不足和地磁傳感器工作原理的基礎上,提出了一種基于地磁時域標量歸一信息的轉速在線測量方法,并通過對算法的測量對照試驗的數據分析,驗證了本算法精度的可靠性。經過實地飛行體轉速測量試驗驗證,根據試驗所獲得的實測數據經過計算得出的轉速,與飛行體實際轉速值誤差在8.2%以內,實現了對高速自旋飛行體全程轉速的有效測量。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中華手工(2017年2期)2017-06-06 23:00:31
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28