單體噴水推進船舶動力定位控制方法研究
2022-10-18 09:55:28李剛強諶棟梁周冠澤
海洋工程 2022年5期
李剛強,諶棟梁,葛 卓,周冠澤,熊 文
(1.中國船舶及海洋工程設計研究院,上海 200011; 2.噴水推進技術重點實驗室,上海 200011; 3.上海振華重工(集團)股份有限公司,上海 200125)
動力定位就是船舶或海上平臺不借助于錨泊系統的作用[1-2],而是利用自身裝備的各類傳感器測出船舶的運動狀態與位置變化,以及外界風力、波浪、海流等擾動力的大小與方向,再采用現代控制理論,建立船舶與推力器的數學模型,并采用多種控制方法,利用計算機進行復雜的實時計算,對船舶各主副推力器的推力進行分配[3-5],控制船舶推力器產生適當的推力與力矩,以抵消海洋擾動力和力矩,使得船舶或海洋平臺保持固定位置、艏向的控制技術。動力定位控制系統的基本原理如圖1所示。
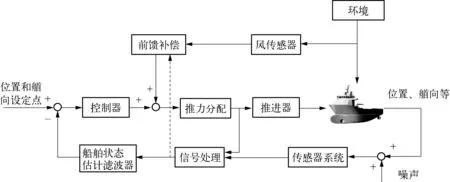
圖1 動力定位控制原理
上述動力定位控制系統原理中的各個環節,國內外均已經有了較為成熟的算法:在船舶運動估計方面,多采用Kalman濾波[6]、非線性無源濾波[7]、H正無窮濾波[8]等基于船舶模型的觀測器;在控制方面,主要是傳統的基于荷載前饋的PD控制算法、LQR控制算法、LQG控制算法[9-12]以及模型預測控制算法[13];在推力分配方面,主要有偽逆算法、(序列)二次規劃算法等[14-16]。可以說,對于裝配有較多全方位推進器、側推等的常規動力定位船舶,要實現定點控制、循跡、目標跟蹤已經基本有跡可循,不難實現控制目標[17]。但對于裝配噴水推進器作為主推的航行船舶的動力定位控制算法則不常見,而這類船舶盡管其主要功能是航行,但其需要定位功能的場景并不少見,如海上巡邏搜救、渡輪的自動靠泊等。Borrett和Birkinshaw[18]曾將國外Hamilton公司的噴水推進器用于動力定位控制,該噴水推進器采用了特殊的導流裝置,能夠產生全方位的推力,Borrett等在推力分配時將其簡化為全方位推進器,且因所涉及的船舶裝配了較多的噴水推進器,因此與上文所述常規動力定位船舶的控制并無本質上的區別。
噴水推進是一種特殊的船舶推進方式[19],它將水流從船底吸入,經過推進泵增速后通過噴口向船后高速噴出,利用噴出水流的作用力來推動船舶航行。通過噴水推進器上的轉向和倒航裝置在水平方向和垂直方向分配和改變噴出水流的方向可以實現船舶的機動操縱[20],對于只在船艉兩側各裝備一個推力方向受限的噴水推進器單體船而言,要實現全方位的動力定位是比較困難的,針對此一類型的船舶,文中設計了一套算法并選擇了合適的參數,采用仿真模擬的方法,驗證了此類船舶實現動力定位的可行性。
1 仿真模型
1.1 緩變流作用下的船舶運動模型
船舶運動模型坐標系如圖2所示,O-ξηζ為空間固定坐標系,坐標原點位于靜水面上;G-xyz為固定于船舶的運動坐標系,坐標原點位于船舶重心;G-x′y′z′為水平隨船坐標系,其原點亦位于船舶重心,但Gx′y′平面始終與Oξη平面平行。在船舶縱向運動幅度較小的情況下,認為G-x′y′z′和G-xyz等同。

圖2 船舶運動模型坐標系
風浪流影響對動力定位控制而言是需要考慮的干擾項。當船體上層建筑受風面積較大和波浪級別較大時,開展動力定位算法研究需將風浪影響作為干擾項引入控制模型。而文中優先建立在緩變流作用下的船舶運動模型,在動力定位工況時的水平面3自由度運動方程可表示為:
(1)
(2)
式(1)為運動學方程,其中xOG、yOG為船舶重心在固定坐標系下的坐標,φ為船舶的艏向角,u、v、r分別為船舶的橫向速度、縱向速度及轉艏速度。式(2)為船舶運動的動力學方程,m為船舶質量,mx、my分別為船舶的縱向附加質量和橫向附加質量,Izz和Jzz分別為船舶繞通過重心的垂直軸的慣性矩及附加慣性矩。XH、YH、NH為由船體與海水相對運動引起的除開慣性力以外的作用于船體上的縱向力、橫向力及轉艏力矩,XP、YP、NP為螺旋槳所施加于船體上的縱向力、橫向力及轉艏力矩。船體的質量/慣量對具體船舶的具體加載工況可以認為是已知量,附加質量慣量則可以通過勢流理論計算得到。
黏性類流體動力XH、YH、NH的計算相對復雜,就船舶的動力定位工況而言,可以采用式(3)~(5)進行估算:
(3)
(4)
(5)
式中:XH的計算參考了船舶阻力計算公式,UC為相對海流速度,β為該流速與船舶縱向x之間的夾角,S為船舶濕表面面積,Re為雷諾數。
(6)
式中:L為船長,υ為海水的運動黏性系數,取1.05×10-6m2/s。YH、NH的計算采用了橫流公式,CD(x)為船體橫截面x處的阻力系數,D(x)為船體橫截面x處的吃水。
1.2 噴水推進器及其控制
如前所述,噴水推進器通過向船后噴水以產生推力[21],就動力定位工況而言,可以認為噴水推進器處于系柱狀態,在此狀態下,噴水推進器消耗的功率P與轉速n立方成正比,比值為CP。
P=CPn3
(7)
系柱狀態下噴水推進器的名義推力T(此處指不經過倒車裝置作用所發出的推力)與轉速n平方成正比,比值為CT。
T=CTn2
(8)
在這點上,噴水推進器與常規的用于動力定位的全方位導管槳是一致的。為改變噴水推進器推力的大小和方向,通常可以通過控制轉速、倒車斗、方向舵來實現。通常可以實現如圖3所示兩種推力曲線包絡圖,其中圖3(a)對應國內某研究所相關產品,圖3(b)為國外某噴水推進器的包絡圖。該推進器通過增加側向導流裝置的方式來實現全方位推力包絡圖,本文所用推進器為圖3(a)所示。
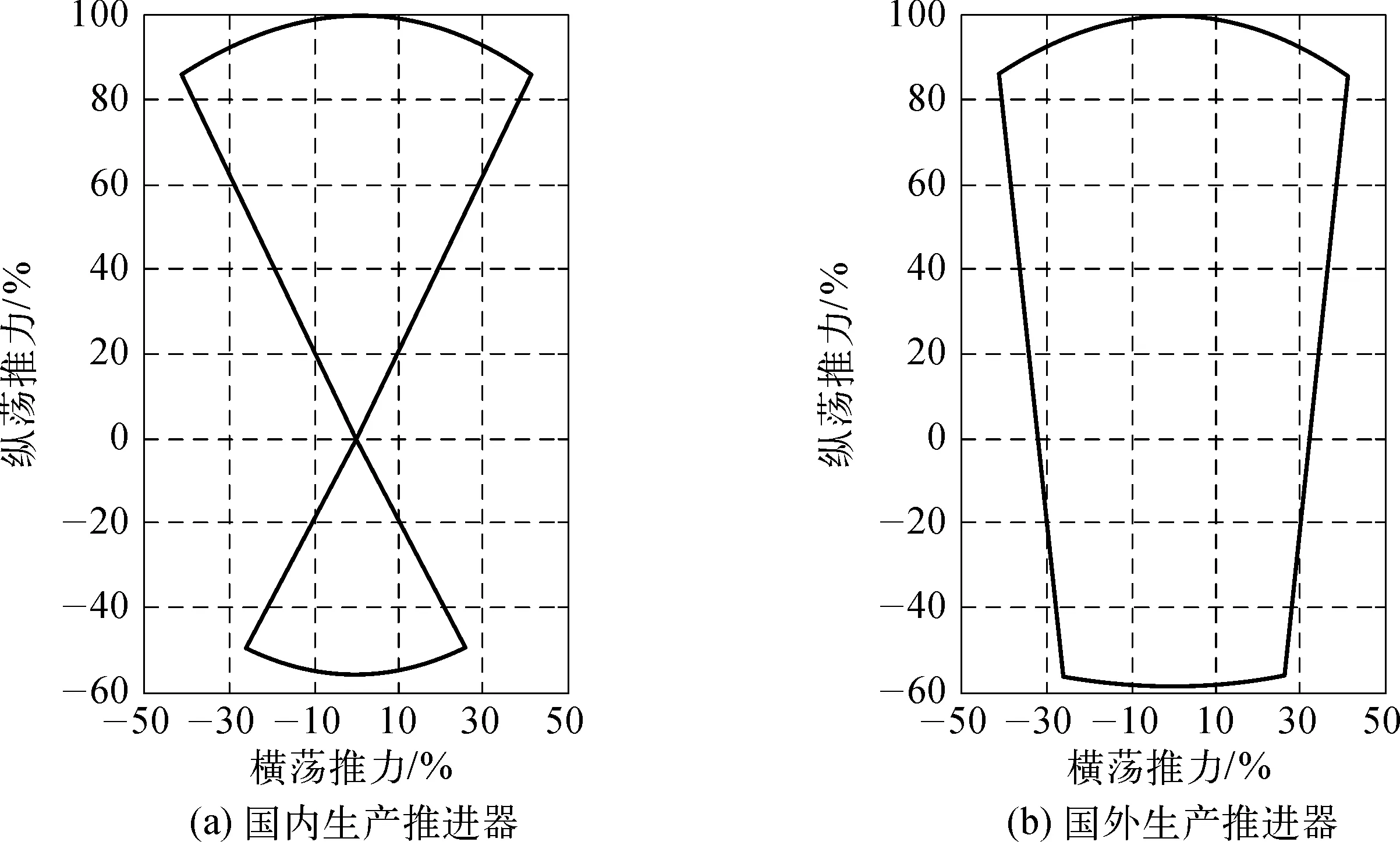
圖3 推進器推力包絡圖
噴水推進器的轉舵控制響應可以用式(9)模擬:
(9)
式中:TE為時間常數,δcom為舵角指令,δ為舵角。同樣,噴水推進器的倒航控制亦可以用類似的一階系統模擬。
2 船舶運動Kalman濾波
2.1 Kalman濾波原理簡介
對于如下所示的連續系統,
(10)
其中,x為狀態變量,u為控制變量,w為單位時間干擾強度為Q(t)的白噪聲。假設該系統在時刻t的狀態變量和協方差分別為xt、Pt,經歷較小的時間間隔Δt以后,假設在此過程中沒有對系統進行觀測且此一時間間隔內控制變量已知,則t+Δt時刻的系統狀態變量可由式(11)和(12)估計:
xt+Δt=Integ{f[x,u(t)],Δt,xt}
(11)
(12)
其中,Integ代表對式(10)所代表的常微分方程進行積分求解,Φt,t+Δt為一步轉移矩陣,通過式(13)進行計算:
(13)
不失一般性,對于在時刻t由式(10)所描述的狀態變量和協方差分別為xt、Pt的系統,對該系統進行如式(14)所示的觀測:
y(t)=h(x,t)+v(t)
(14)
其中,h(x,t)為測量方程,v(t)為測量誤差。假設v(t)為強度R(t)的白噪聲,那么經由觀測向量校正后的系統狀態變量及其協方差可由式(15)~(17)計算:
(15)
(16)
(17)
其中,Ht為測量方程對狀態變量x的偏微分,
(18)
2.2 用于濾波的船舶運動模型
如上文所示,Kalman濾波算法是一種基于模型的觀測算法[22],為了采用該算法,首先必須確定式(10)中的f[x,u(t)]。針對船舶在風、浪、流作用下的船舶運動,采用式(19)~(24)對船舶進行運動濾波。
1)船舶低頻運動模型:
(19)
(20)
其中,xL,yL,ψL為固定坐標系下船舶低頻運動的坐標和艏向;uL,vL,rL為運動坐標系下船舶低頻運動的縱向、橫向速度和轉艏角速度;τthru為推進器推力向量,τwind為風力向量;Xuu,Yvv,Nrr為船舶的縱向、橫向和艏向二階水動力系數;uc,vc,rc為流速在縱向、橫向和艏向的分量;wu,wv,wr為具有一定強度的白噪聲,表示船舶低頻運動模型的誤差;M為船舶慣性矩陣。
2)船舶波頻運動模型:
(21)
(22)
(23)
其中,xH,yH,ψH為船舶波頻運動的縱向、橫向坐標和艏向角;ξx,ξy,ξψ為船舶波頻運動的縱向、橫向坐標和艏向角的積分狀態變量;ζx,ζy,ζψ為相對阻尼系數;ω0x,ω0y,ω0ψ為波頻;wx,wy,wψ為零均值高斯白噪聲;Kwx,Kwy,Kwψ為高斯白噪聲增益(基于海況)。
3)流干擾模型:
(24)
其中,Vc,βc為流速和流向;wvc,wβc,wrc為零均值高斯白噪聲。
有了船舶運動的預測模型,尚需采用傳感器對其進行觀測方可得到船舶的運動狀態。一般而言,動力定位船舶均需配備用于測定位置的位置參考系統和測定艏向的羅經[23]。對于一般的位置參考系統,假設其所測得的位置均可轉化為固定坐標系下的位置,則觀測方程可表示為:
(25)
其中,xins,yins為位置傳感器的安裝位置;vN,vE為位置測量誤差。為簡單起見,這里沒有考慮橫搖和縱搖的影響。
對于羅經類傳感器,其觀測方程可表示為:
hgyro=ψL+ψH+vHd
(26)
其中,vHd為位置測量誤差。
3 船舶動力定位控制
3.1 基于荷載前饋的PD控制算法
在定點定艏向等控制中,以觀測器——文中為Kalman濾波器所得到的船舶位置、速度以及除推進器以外的荷載信息為輸入,采用式(27)計算船舶動力定位控制中所需推力和力矩:
(27)
其中,Psurge,Psway,Pyaw為比例常數;Dsurge,Dsway,Dyaw為微分常數;δbias, surge,δbias, sway,δbias, yaw分別為橫向、縱向以及轉艏與目標的偏差,τext_1、τext_2、τext_3分別為已知的外界橫向、縱向和轉艏力矩。
3.2 進入自動模式時的控制策略
在動力定位的實際操作中,動力定位操作員按下操作指令后,控制系統會先將船舶速度降低,然后選定船舶的當前位置和當前艏向作為定位目標,這一過程中的控制策略為:
(28)
3.3 轉變目標位置和艏向時的控制策略
動力定位船舶轉變定位的目標位置點和艏向時,其控制可以分為兩個階段,第一階段以系統指定的移位速度為控制目標,沿當前目標位置與新的目標位置之間的連線進行控制:
(29)

船舶改變艏向時的控制策略與轉變目標位置點時的控制策略相似,此處不予贅敘。
4 推力分配
4.1 基于廣義推進器的二次規劃方法
(30)
所有r臺推進器的總推力可表示為:
(31)
推力分配的總目標是在能量消耗最小的情況下使得推進器所分配得到的推力盡可能等于目標推力[17],引入松弛變量s來表示二者之差,并假設推進器所消耗的能量與推力大小平方成正比,則推力分配可表示成如下極值問題:
(32)
式中:H和Q為權矩陣。滿足約束條件:
(33)
對用于動力定位的常規推進器如側推、全方位槳在以一個較小的時間步上,其推力約束均可以簡化為線性不等式的組合[16],因此推力分配問題就可以轉化為一個經典的帶圖約束的二次規劃問題求解。此問題已有較為成熟的解法,且局部最優解即為全局最優解。
4.2 針對噴水推進器的特殊處理
文中所采用的噴水推進器的推力包絡圖如圖3(a)所示,可知在推力分配時其約束難以轉化為凸約束,為利用上述二次規劃方法求解,可以將每個推進器分成正推和倒推兩種情況,即對全部r臺推進器所組成的推力分配問題,可通過求解2r個子問題的方式得到其最優解。采用分正推和倒推情況進行處理后,噴水推進器推力分配的局部約束條件與全回轉推進器推力分配的局部約束條件類似,其推力約束詳見圖4。
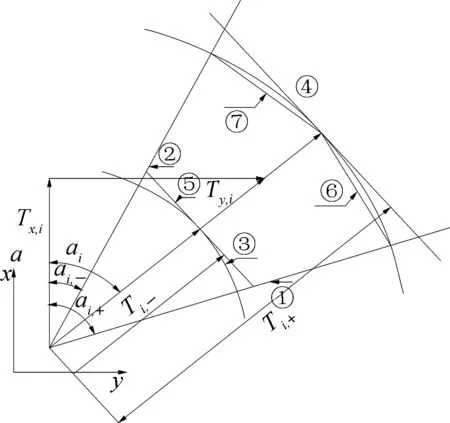
圖4 噴水推進器推力約束
Fx,i,Fy,i在分配時應當為圖中直線1、2與圓弧3、4所圍成的區域。在具體計算時圓弧3用直線5近似,圓弧4用直線6與直線7近似,因此由直線6、7、5、2、1圍成凸五邊形,該五邊形對編號為i的推進器的約束可表示為:
(34)
5 仿真模擬
5.1 目標船舶主要參數
為了驗證算法的可行性,以一艘單體噴水推進船舶作為目標對象,對動力定位工況下常規操作進行了模擬。目標船基本信息為:水線長11 m,型寬3.4 m,型深1.2 m,吃水0.48 m,排水量8.5 t。船艉左右兩側各裝備一臺噴水推進器,該型推進器可在±30°范圍內調整推力方向,其推力性能見表1。模擬過程中,所涉及的主要控制器PD參數見表2。
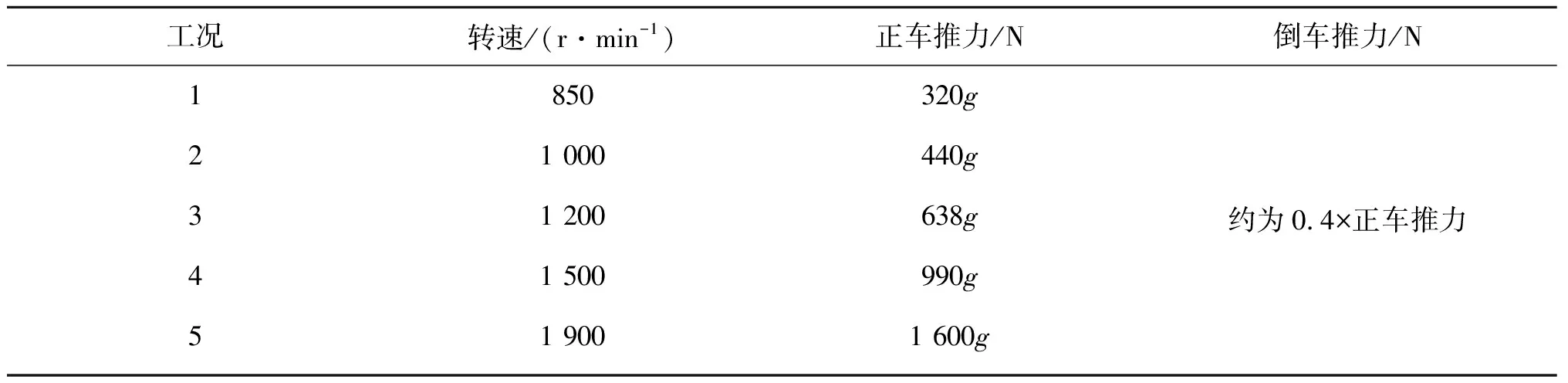
表1 目標船噴水推進器性能

表2 動力定位算法控制參數
5.2 無干擾條件下仿真結果
首先開展無干擾條件的仿真試驗,即模擬時不考慮風和浪,只添加緩變流,流的大小約為0.617 m/s,來流方向約為340°。
1)從自由漂浮狀態進入自動定位
開始時,船舶處于流作用下的自由漂浮狀態,模擬自動定位操作控制后船舶的運動狀態。圖5為此過程中船舶的北向位置、東向位置以及艏向的時間變化歷程。可以看出,系統在收到自動定位指令后,船舶迅速減速后選定當前位置和艏向(圖上目標位置北向、東向均為0 m,目標艏向角60.5°,之所以為0 m是數據處理過程中將原點選在此點)作為控制目標,然后一直保持該位置和艏向,定位效果非常好。圖6為此過程中的命令推力、分配推力與實際推力三者之間的對比,可以看出分配推力與命令推力符合得較好,證明推力分配算法工作正常,實際推力較命令推力有一定的滯后,此為執行機構存在滯后所引起。
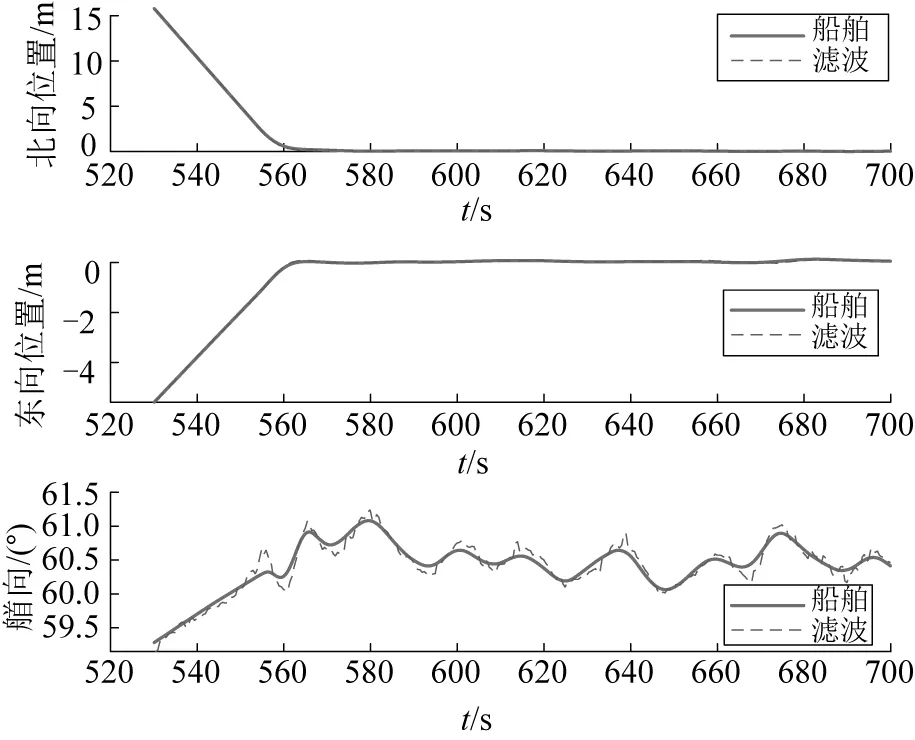
圖5 船舶位置、艏向時歷—進入自動定位
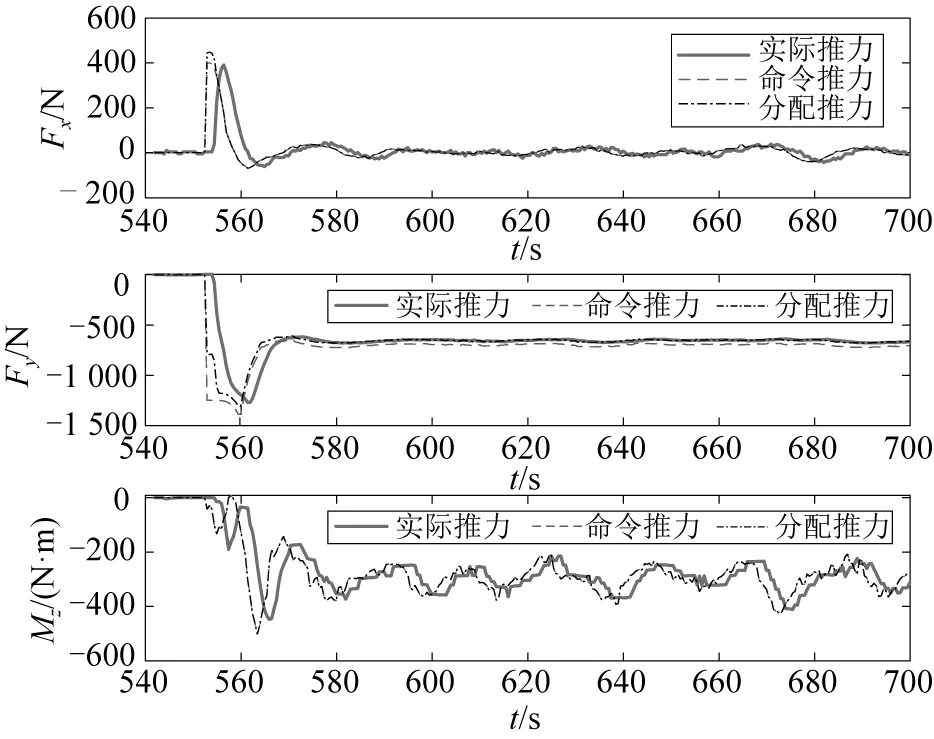
圖6 命令、分配及實際推力對比—進入自動定位
2)變換目標艏向
在穩定定位的基礎上,將目標艏向角調整至0°,圖7為此過程中船舶的位置及艏向變化時歷,圖8為命令推力、分配推力與實際推力的對比。從模擬結果可以看出,改變目標艏向的過程中,船舶位置穩定,推力分配算法亦運行良好,船舶轉艏至新的目標艏向后,亦能穩定的定位在該新目標艏向。
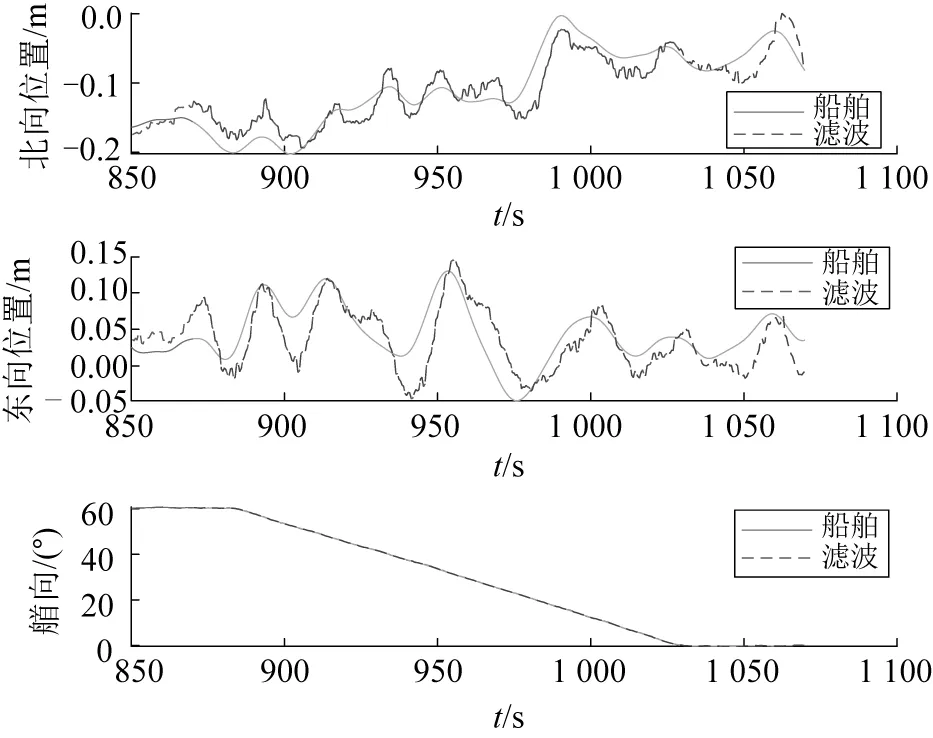
圖7 船舶位置、艏向時歷—轉換目標艏向
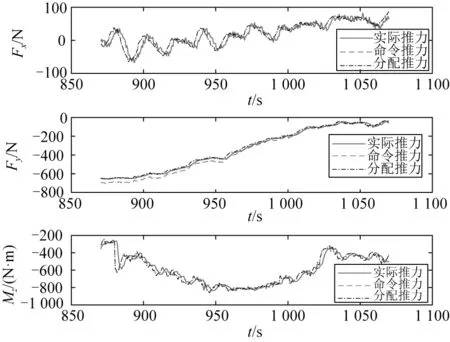
圖8 命令、分配及實際推力對比—轉換目標艏向
3)轉變目標位置
在穩定定位的基礎上,轉變目標位置至(-40,-40),圖9為此過程中船舶的位置及艏向變化時歷,圖10為命令推力、分配推力與實際推力的對比。
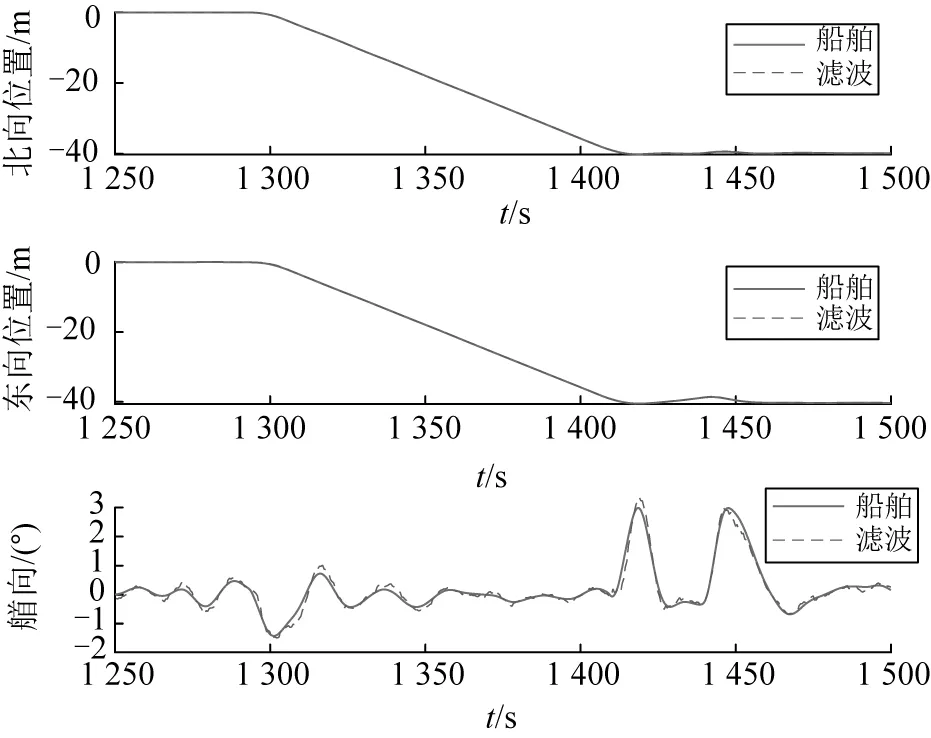
圖9 船舶位置、艏向時歷—轉變目標位置
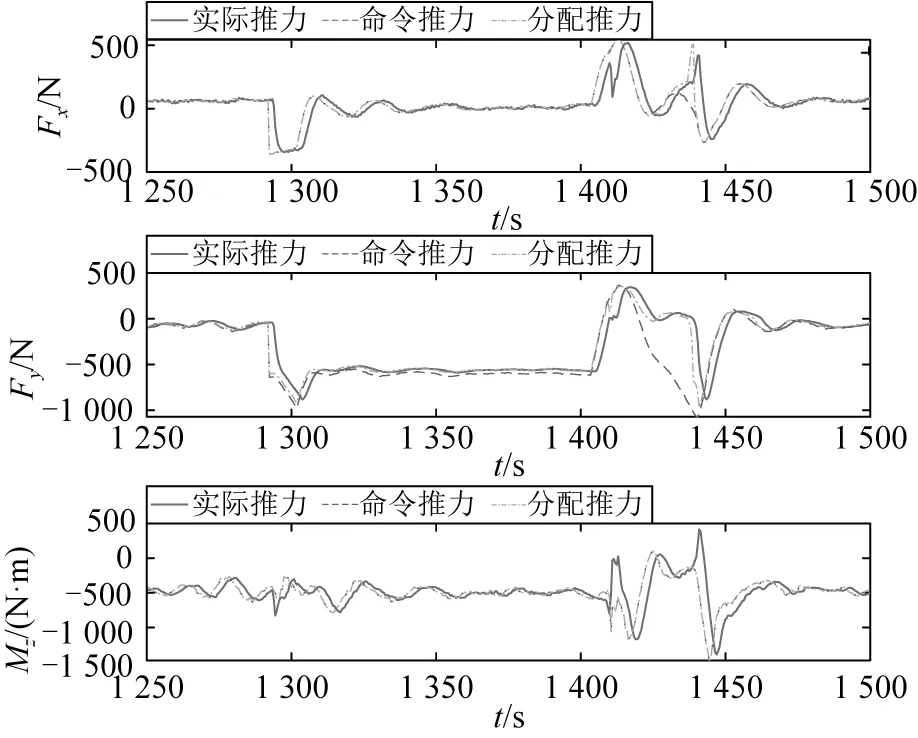
圖10 命令、分配及實際推力對比—轉變目標位置
從圖9中可以看出除在船舶從原目標位置加速以及達到新的目標位置減速這兩個階段中船舶艏向出現較大——約3°的波動外,整個移位過程中,船舶艏向控制良好,船舶移位至新的目標位置后亦能穩定的定位在新的目標位置。從圖10可以看出,造成此艏向波動的原因在于在船舶加、減速的過程中分配推力與命令推力之間出現了較大的偏差。造成分配的推力跟不上命令推力的原因在于系統推力不足,此種情況下可通過減小移位目標速度改善。
4)轉艏至艉部來流失位模擬
由于噴水推進器倒推的推力要遠小于正推力,經控位能力分析表明艉部來流時,船舶不具備穩定定位的能力,文中通過位置自動控制下的持續轉艏對此情況進行了模擬。圖11為此過程中船舶的位置及艏向變化時歷,圖12為響應時歷上命令推力、分配推力與實際推力的對比。
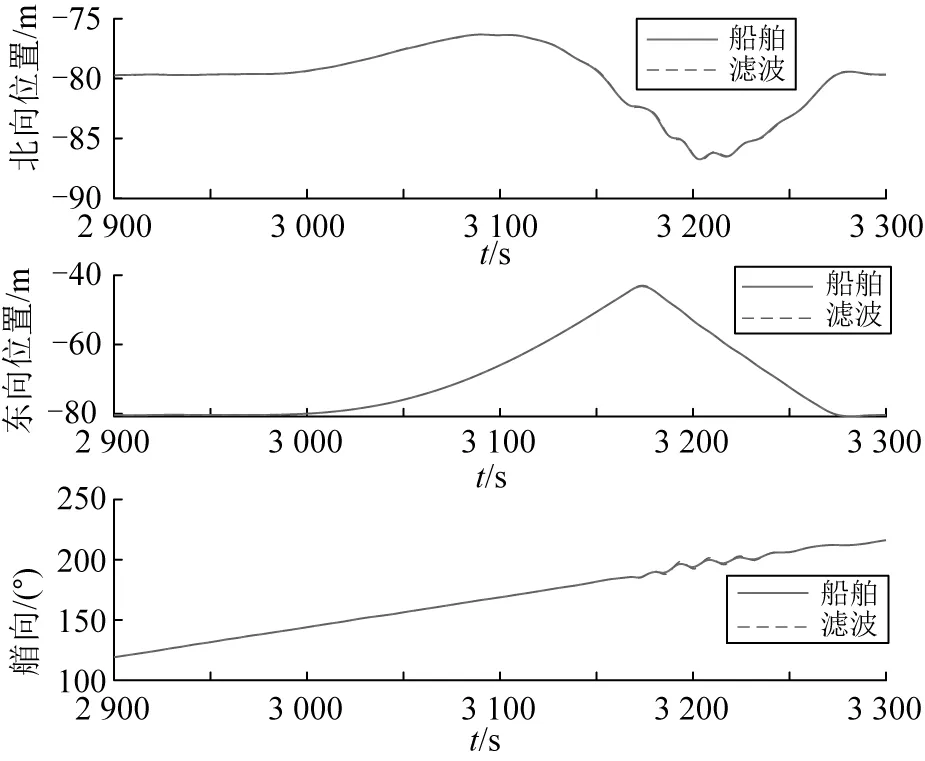
圖11 船舶位置、艏向時歷—持續轉艏
從圖12中可以看出,當船舶轉艏至140°、相對來流為158°時分配推力中的橫向力明顯跟不上命令的橫向力,此亦因系統推進能力不足所致,與之對應,船舶開始失位。當船舶轉過來流對應的對稱角度即轉至約190°后,分配的推力開始跟上命令推力,船舶開始減小定位誤差,直至定位至原來的目標位置。
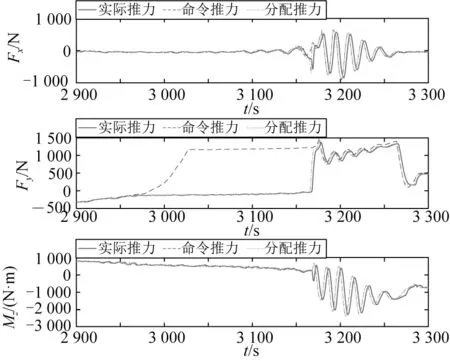
圖12 命令、分配及實際推力對比—持續轉艏
5.3 風浪干擾條件下仿真結果
進一步基于前述針對船舶在風、浪、流作用下的運動濾波模型,對其在有風浪干擾下開展了定位控制仿真試驗。試驗條件設置為風速10 m/s,有效波高1 m,流的大小約為0.617 m/s,來流方向約為340°。試驗結果如圖13和圖14所示,圖中可以看出,在存在外界干擾條件下,雖然船舶位置和艏向在擾動下會產生偏離,但通過所設計的控制算法能在較短時間內恢復原位置,取得較好的定位效果。
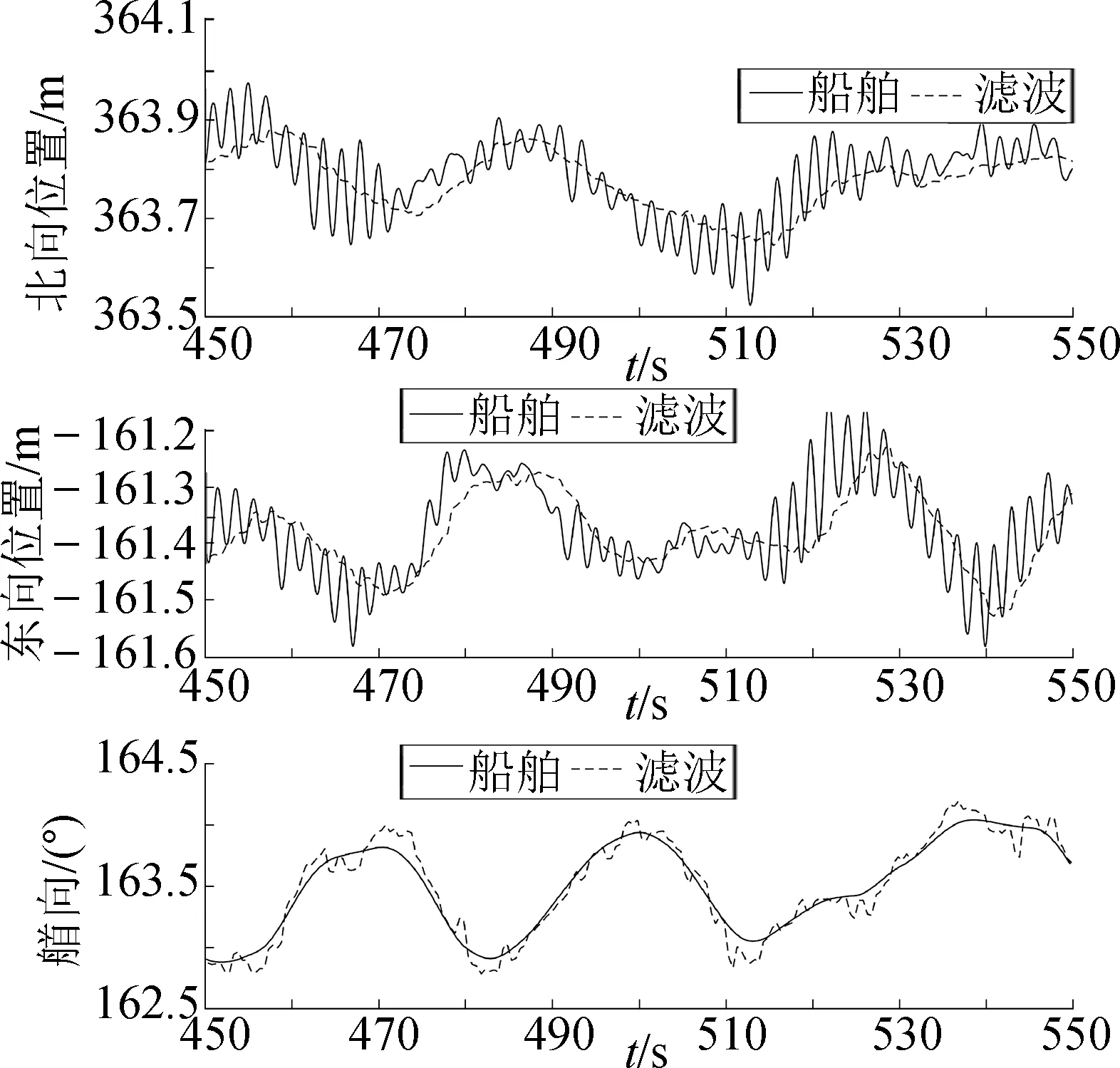
圖13 船舶位置、艏向時歷—定位(有干擾條件)
6 結 語
以一型單體噴水推進船舶為研究對象開展了動力定位算法設計及仿真試驗研究。文中以Kalman濾波器所得到的船舶位置、速度以及除推進器以外的荷載信息為輸入,基于荷載前饋的PD控制算法并綜合考慮噴水推進器特殊的推力分配原理,設計出可用于單體噴水推進船舶動力定位的控制算法,實現了定位、移位及改變目標艏向等基本的動力定位操作,并通過仿真試驗進行了驗證。可以認為對于單體噴水推進這類并非設計用于動力定位作業的船舶,在外荷載較小的情況下,只需避開特定的外部荷載方向而使得外加縱向荷載補位較大正值,則可以實現動力定位的基本功能。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24