基于一種多功能清掃機器人結構設計
2022-10-17 08:24:42姬曼馬煒釗劉鐘遠劉瑞雪陳衍琪
科海故事博覽 2022年29期
姬曼 馬煒釗 劉鐘遠 劉瑞雪 陳衍琪
(煙臺科技學院,山東 煙臺 265699)
從1990 年掃地機器人的誕生到目前為止,一直是炙手可熱的機器人,從大商場到寫字樓再到家庭隨處可見,但是,第一代掃地機器人,工作效率低下、清潔效果差、無法識別周圍環境,智能程度低。直到2000 年初,智能清掃機器人的誕生,該機器人在清掃的工作效率上得到了提升,但智能水平仍不能到達理想中的效果,不能夠有效對房屋進行全面覆蓋式清掃。再到2010 年后,隨著科技技術的發展,智能清掃機器人在清掃效率得到了快速的發展,截至目前第五代清掃機器人已用到智能識別技術,能更好地為人們服務,因此也得到了人們的喜愛,所以在家庭中,各大商場應用非常廣泛。
但對于高校來說這種機器人不太適合,因為對于高校的大階梯教室來說,階梯教室大,有臺階,每排桌子都有桌面、桌洞,所以不太適合高校,如人工清掃階梯教室工作量大、繁瑣。因此,本文針對這種情況設計了一種多功能掃地機器人,它能完成清掃平地、爬樓梯、清掃樓梯、清掃桌面,自動吸塵、自動倒垃圾等工作。本文將對該機器人進行設計。
1 多功能清掃機器人總體方案的確定
多功能清掃機器人是集自動爬樓、自動倒垃圾、清掃吸塵、監控感應于一體的智能掃地機器人,與普通掃地機器人不同,多功能清掃機器人能夠從穩定的地面運動實現自主的上下爬樓運動,當清掃桌面垃圾時機器人的攝像頭裝置自動升起,對桌面進行掃描,當發現垃圾立即對其進行清掃。
2 清掃機器人爬行機構方案的確定
借鑒已經研制的機器人設計方案的優點,本文清掃機器人爬行機構主要由電機、前支撐裝置、后支撐裝置、麥克納姆輪、抬升機構、機架組成。動力系統由電機和導軌式升降機構組成,為整個機器人的爬行提供動力。爬行機構的整體結構前后具有高度差的支撐裝置能水平支撐在樓梯上,當機器人爬樓時前后支撐裝置交替支撐、驅動實現多級臺階連續攀爬。爬行機構是整個機器人的支撐載體,在滿足剛度和強度的條件下,其質量以輕便為主,機構設計越簡單越好,所以做成H 型結構。
3 清掃機器人整體機構方案的確定
本設計采用升降式爬樓梯結構作為基本載體,搭載前掃地清潔裝置和圖像識別感應裝置的基本方案[1]。如圖1 所示,1 為爬樓裝置,前后兩組弓形支撐結構可在自動化控制下交替抬升及前后平移,從而實現臺階的攀爬;2 為吸塵器,吸塵風機作用下灰塵可經垃圾導向殼進入垃圾收集裝置;3 為掃地裝置,掃地裝置中的旋轉滾刷將地面灰塵揚起配合吸塵器吸塵;4 為桌面清理裝置,旋轉清理刷配合圖像識別功能將桌面垃圾掃到地面;5 為電池,鋰電池高能量,使用壽命長,綠色環保為掃地機器人提供電源能量;6 為驅動裝置,采用全向驅動技術,加之麥克納姆輪的獨特運行方式,全向智能移動平臺能夠在任意方向上實現平移和原地旋轉;7 為垃圾收集裝置,通過絲杠帶動推板前進,推板達到最大極限時,將垃圾桶后蓋頂開,垃圾隨之倒掉。
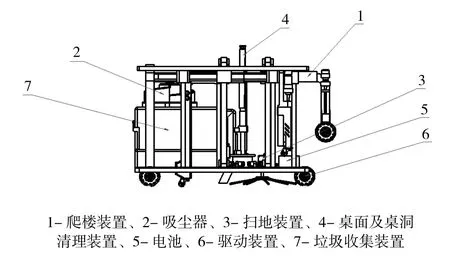
圖1 清掃機器人的整體機構
3.1 爬樓機構
機器人的爬樓機構采用的是弓形升降導軌機構,這種弓形升降導軌機構動作簡單,結構可靠,工作高效。這種弓形升降導軌機構左右各一組,一組兩個弓形機構,一組里面兩個弓形機構在運動的過程通過自動化控制交替抬起運行,實現前后平移,從而達到爬樓的目的[2]。
當機器人在平地清掃時可按規定路線進行平地上的平移與旋轉,在移動的過程中旋轉刷將地面垃圾以及灰塵揚起,通過吸塵機將垃圾以及灰塵導向垃圾倉,從而實現清掃,當清掃機器人運行到有階梯的樓道口時,弓形升降導軌機構交替抬起進行爬樓,每爬一階清掃的旋轉刷進行旋轉將塵土揚起,吸塵器將垃圾吸到垃圾倉,又因機器人的輪子選擇的是麥克納姆輪,任意方向上的平移與原地旋轉。該機器人的機構可實現多級臺階連續攀爬以及任意方向上的平移與原地旋轉。如圖2 清掃機器人的爬樓機構。
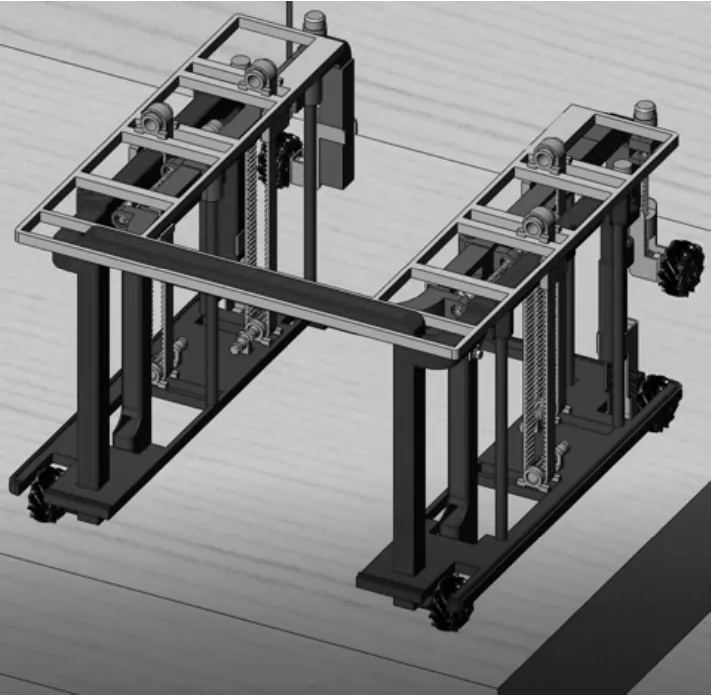
圖2 清掃機器人的爬樓機構
3.2 桌面清掃機構
桌面清掃機構安裝在清掃機器人的上方如圖3 桌面清掃機構所示,該機構清潔刷設計為折疊時,目的是為了節約空間,清潔刷與支撐桿有設計為升降模式,只有工作時,清潔刷與支撐桿才會升起。
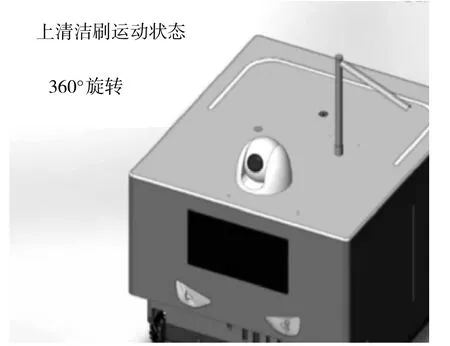
圖3 桌面清掃機構
該清潔機器人上清潔時的工作過程:當清掃桌面時,首先升降式攝像頭會伸出探頭進行桌面檢測,如檢測到垃圾,升降攝像頭會自動下降,桌面清掃機構自動升起,對桌面進行360°旋轉清掃,將垃圾清掃撥動至地面,掃地清潔裝置將垃圾導向到垃圾倉,從而對桌面進行清掃。
3.3 自動倒垃圾機構
該清掃機器人采用的是自動倒垃圾系統,當垃圾集滿箱體時,絲杠帶動推板前進,垃圾箱頂開垃圾倉門,垃圾隨之倒掉。如圖4 所示。
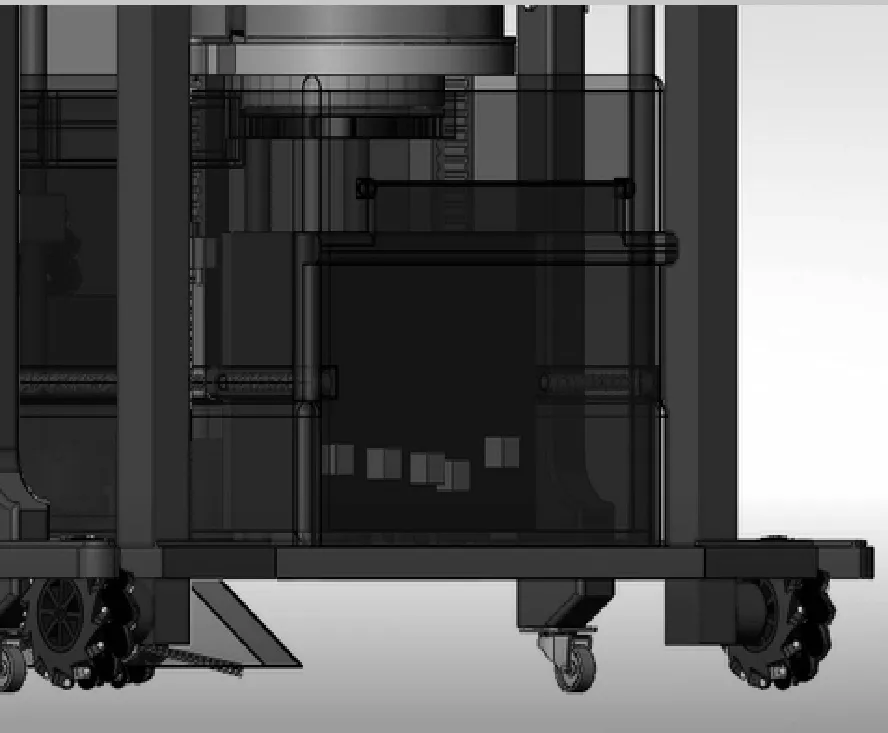
圖4 自動倒垃圾裝置
3.4 攝像頭裝置
本文多功能清掃機器人選擇的是升降式攝像頭,當清掃平面時該攝像頭保持原來高度,進行地面掃描;當多功能掃地機器人對桌面進行清掃時,該攝像頭升起,360°對桌面進行掃面。因此,該攝像頭的功能用來捕捉桌面、地面的垃圾,進行系統垃圾歸類,起到識別作用。如圖5 攝像頭所示。
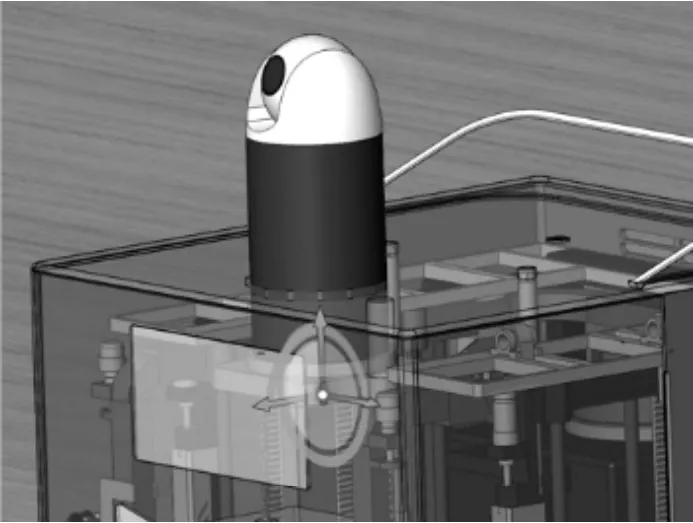
圖5 攝像頭裝置
3.5 清掃刷
本文多功能機器人采用的是雙排清潔刷,清潔刷旋轉過程中將垃圾與塵土揚起,之后通過導向口,將垃圾收集在垃圾倉,完成垃圾的清掃。
因此,清潔刷的功能是將地面垃圾聚集,吸塵器將垃圾吸入垃圾箱體內,起到清潔作用。如圖6 清掃刷所示。
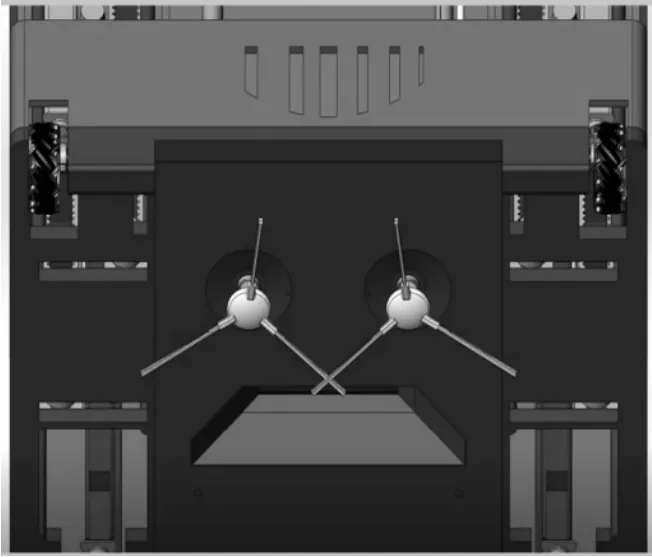
圖6 清掃刷
4 控制裝置
感知模塊到控制模塊再到移動、清潔模塊。感知模塊的功能準確定位,理論上不存在定位盲區,適合清掃任務復雜地形,遇到特殊情況及時感知并做出反應。控制模塊是掃地機器人的中心,控制模塊對其他各功能模塊進行控制。移動模塊負責行走,由驅動電機、驅動輪、麥克納姆輪以及前后裝置抬升機構組成[3],實現上下樓以及各個方向的行走。清潔模塊采用的是旋轉滾刷,由電機驅動,箱體用來存放紙屑、灰塵等固體垃圾。
5 機器人爬樓工作原理
機器人完成地面清潔抵達樓梯邊緣時,啟動樓梯清掃模式,機器人首先通過讀取傳感器反饋判斷機器人的位置,當機器位于樓梯頂端時,進行平移清潔,然后啟動變形復位模式,當判斷機器人不是位于樓梯頂端且滿足位于樓梯底端時,啟動自動清潔模式,通過傳感器識別的位置反饋依次進行平移清潔模式及單級樓梯攀爬模式,以實現臺階的攀爬及清潔。每完成一級臺階清潔后,返回程序,首先判斷是否位于樓梯頂端,如此循環,可實現連續多級臺階的自動清潔并抵達樓梯頂端[4]。
6 掃地機器人三維建模
利用SolidWorks 軟件對智能掃地機器人進行三維建模,并在SolidWorks 軟件中對智能掃地機器人運動軌跡進行了虛擬仿真。使該機器人與實際工作環境相似,通過結果顯示合理,三維建模如圖7 所示。通過結果確定了掃地機器人的機構,并與實際要求相符合。

圖7 掃地機器人的三維模型
本機器人外形類似龍貓,外觀可愛并帶有手把,便攜方便,整體似方形,可以最大限度地減小運動路徑所占面積,可以實現節省人力、高效率工作,保證能夠清潔一些狹窄的角落。
7 結論
本文主要對多 功能清掃機器人總體方案、爬行機構方案確定,又闡述了爬樓機構的工作原理,最后對多功能清掃機器人進行了三維建模。通過SolidWorks軟件對該多功能清掃機器人進行仿真,結果證明該方案合理。
