兩相混合式步進電動機恒流細分驅(qū)動控制仿真研究
2022-10-15 02:36:52戚振亞秦倩倩王立英
微特電機 2022年9期
關(guān)鍵詞:模型
戚振亞,秦倩倩,王立英,呂 強
(中國電子科技集團公司第二十一研究所,上海 200233)
0 引 言
隨著數(shù)字控制技術(shù)的發(fā)展,兩相混合式步進電機的恒流細分驅(qū)動控制技術(shù)在航天步進電機上得到越來越多的應(yīng)用。恒流細分驅(qū)動不但可以使步進電機有更小的步距角、更高的定位精度,而且可以減小電機的振動與噪聲,使電機運行更加平穩(wěn)[1]。
本文從電機轉(zhuǎn)速和電磁轉(zhuǎn)矩角度出發(fā),建立了混合式步進電動機恒流細分控制Simulink仿真模型,重點仿真分析了在不同細分狀態(tài)下轉(zhuǎn)速和電磁轉(zhuǎn)矩幅值的變化情況,驗證了恒流細分驅(qū)動可以增加電機的運行平穩(wěn)性。
1 兩相混合式步進電動機恒流細分數(shù)學(xué)模型
1.1 混合式步進電動機數(shù)學(xué)模型
MATLAB/Simulink仿真軟件平臺提供了基于SimpowerSystem仿真引擎的混合式步進電機模型[2]。該電機模型主要包括電氣和機械兩部分,其中電氣部分根據(jù)混合式步進電動機電壓平衡方程搭建,機械部分由慣性轉(zhuǎn)矩、粘滯阻尼系數(shù)引起的阻力矩和負載轉(zhuǎn)矩組成的方程搭建,兩部分通過電磁轉(zhuǎn)矩結(jié)合起來,該數(shù)學(xué)模型假設(shè)磁路不飽和,忽略了互感、磁滯效應(yīng)以及各種損耗的影響。
混合式步進電動機相電壓平衡方程[3]:
Vi(t)=RIi(t)+d(LiiIi(t)+LijIi(t))/dt
(1)
式中:Vi(t)為相電壓;Ii(t)為相電流;R為相電阻;Lii和Lij分別為自感和相間互感,二者與轉(zhuǎn)子機械位置角θm有關(guān)。
忽略互感的影響,兩相混合式步進電機相電壓平衡方程:
(2)
由式(2)可見,相電壓由三部分組成,第一部分是相電阻引起的電勢,第二部分是相電流變化引起的感應(yīng)電勢,第三部分是轉(zhuǎn)子位置變化引起的反電動勢。
兩相混合式步進電動機反電動勢可近似表達為:
(3)
式中:Nr為轉(zhuǎn)子齒數(shù);Φm為最大磁通。
兩相混合式步進電機的電磁轉(zhuǎn)矩Te表達式:
Te=-NrΦm[Ia(t)sin(Nrθm)+Ib(t)cos(Nrθm)]-
Tdmsin(2Nrθm)
(4)
式中:Tdm為自定位轉(zhuǎn)矩。
兩相混合式步進電機的機械方程:
(5)
式中:J0為轉(zhuǎn)子轉(zhuǎn)動慣量;B0為粘滯阻尼系數(shù);TL為負載轉(zhuǎn)矩;ωr為機械角速度。
1.2 恒流細分驅(qū)動數(shù)學(xué)模型
恒流細分驅(qū)動實際上是將通入步進電機繞組中的電流由矩形波變成階梯波,使步進電機內(nèi)部合成角度均勻分布的圓形旋轉(zhuǎn)磁場。以四細分為例,四細分是把每個控制周期(360°電角度)均分為16個不同的通電狀態(tài),每個狀態(tài)相差22.5°電角度(對應(yīng)機械角度0.45°),如圖1所示,16個不同的通電狀態(tài)下對應(yīng)的兩相相電流波形如圖2所示。
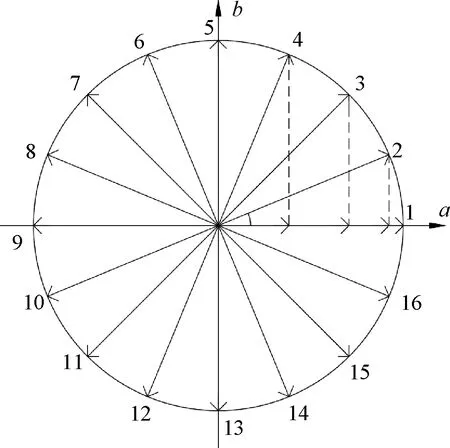
圖1 四細分單個控制周期合成磁場情況
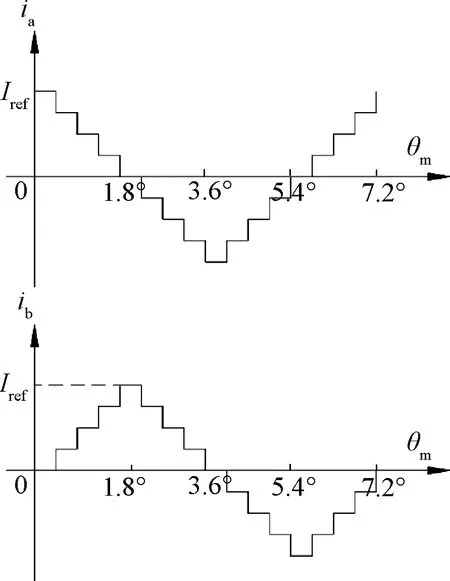
圖2 四細分兩相電機相電流情況
混合式步進電動機等步進角均勻細分控制時,相電流公式[4-5]為:
(6)
式中:Im為電機的額定相電流;α為電流實時電角度;N為細分數(shù);S為運行步數(shù)。
2 仿真模型的建立
2.1 步進電機仿真模型
本文選用MATLAB/simulink 軟件中自帶的混合式步進電動機仿真模型,該模型正是根據(jù)前文的數(shù)學(xué)模型搭建起來的,如圖3所示,模型主要包括Mechanical、Windings和FEM三個子模塊,Windings和FEM是電氣部分,Mechanical是機械部分,兩部分通過電磁轉(zhuǎn)矩連接起來。
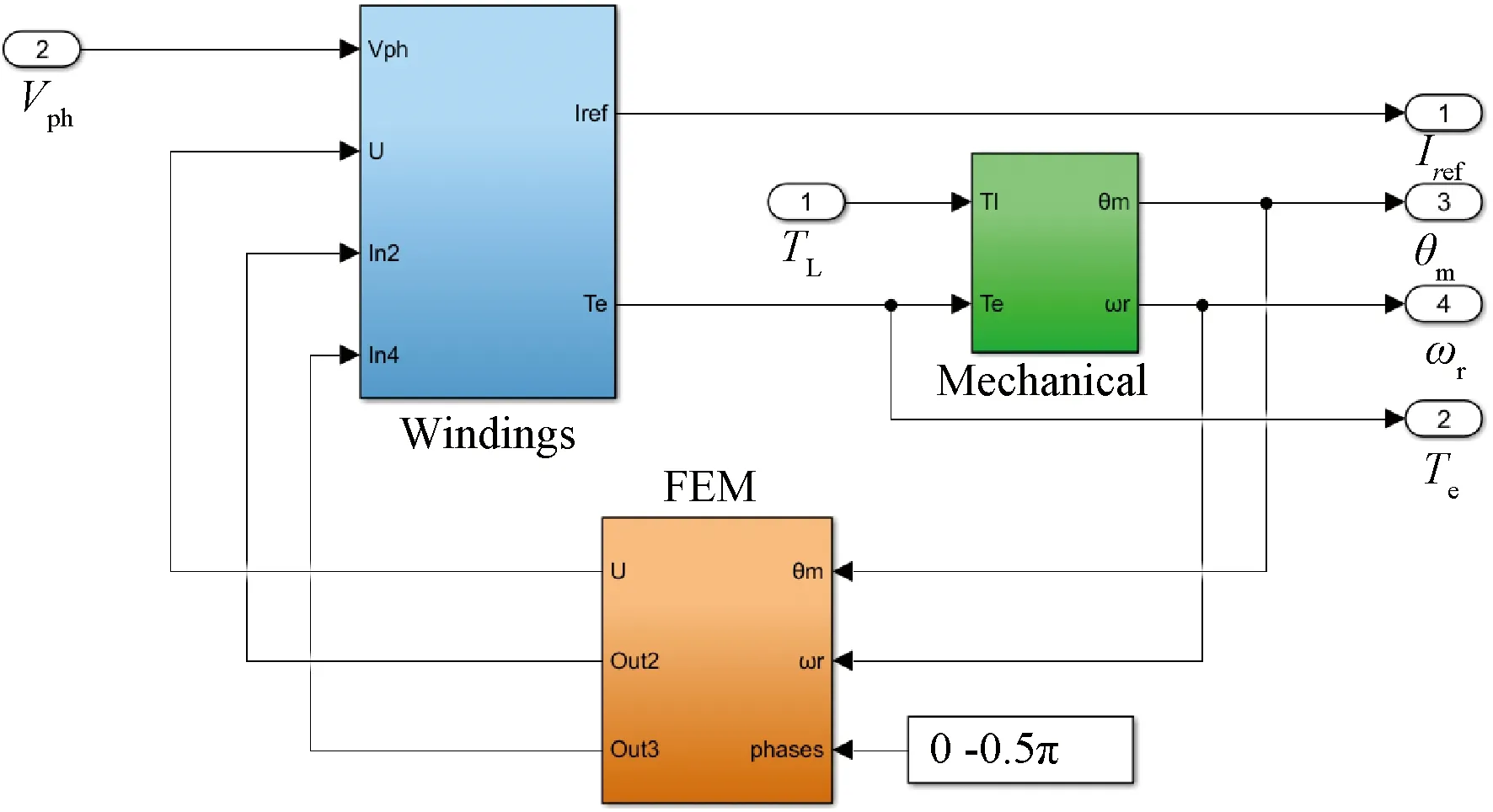
圖3 兩相混合式步進電動機模型
Mechanical子模塊如圖4所示,主要有負載轉(zhuǎn)矩TL和電磁轉(zhuǎn)矩Te兩個輸入端口,轉(zhuǎn)子機械位置角θm和機械角速度ωr兩個輸出端口。
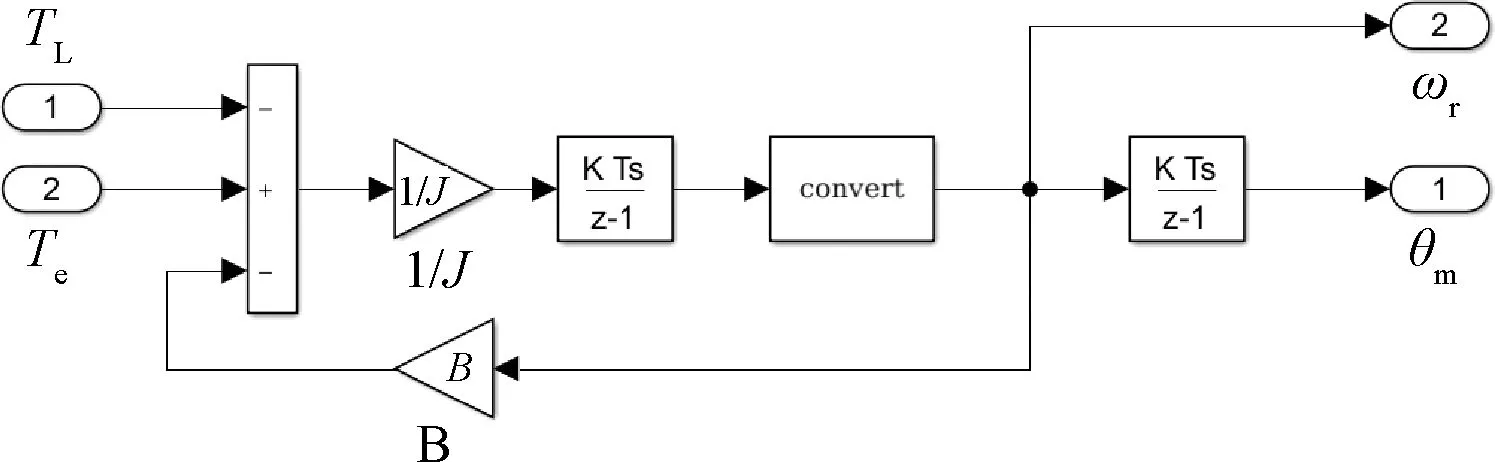
圖4 Mechanical子模塊
Windings子模塊如圖5所示,主要有相電壓Vph、反電動勢U等輸入端口,相電流Iref、電磁轉(zhuǎn)矩Te兩個輸出端口。FEM模型如圖6所示,主要有轉(zhuǎn)子機械位置角θm、機械角速度ωr等輸入端口,反電勢U(V)等輸出端口。

圖5 Windings子模塊
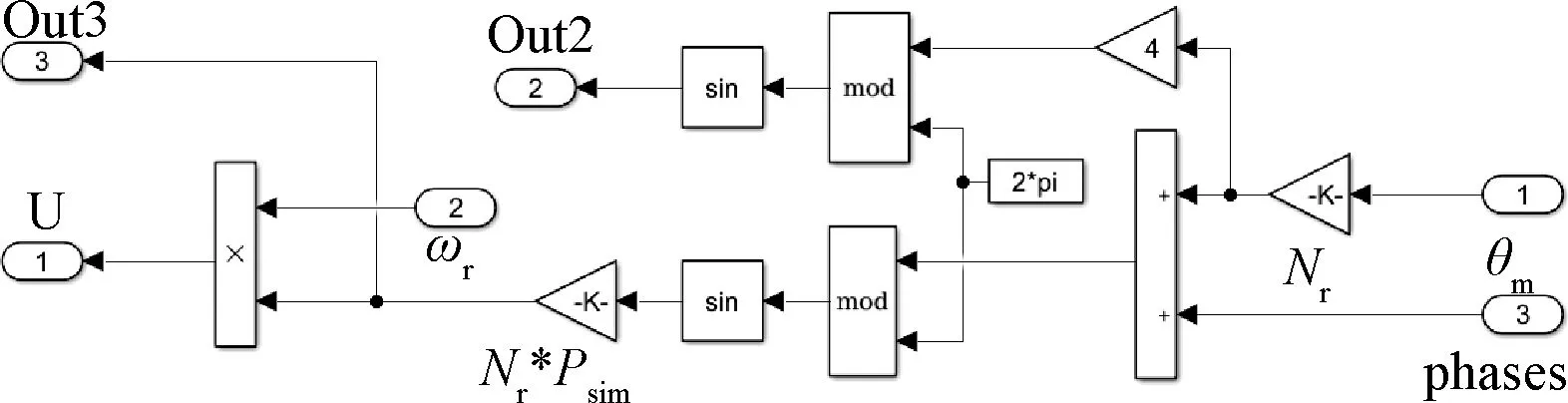
圖6 FEM子模塊
2.2 恒流細分驅(qū)動仿真模型
恒流細分驅(qū)動仿真模型如圖7所示,包括電流細分子模塊、PWM子模塊和功率驅(qū)動模塊三部分。
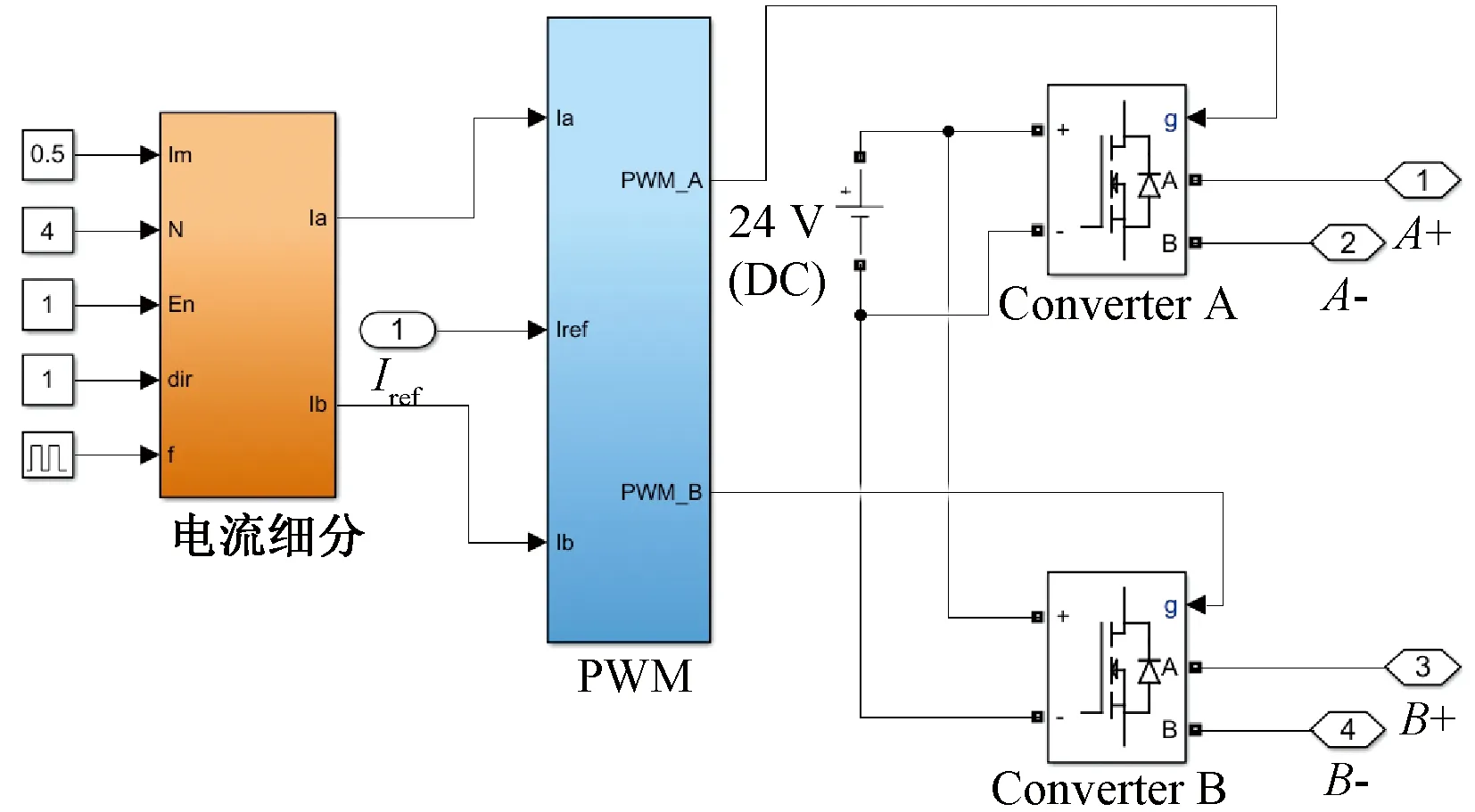
圖7 恒流細分驅(qū)動模型
根據(jù)式(6)的恒流細分數(shù)學(xué)模型,搭建了仿真模型,如圖8所示,主要有步數(shù)S、細分數(shù)N、額定相電流Im等輸入端口,擬合的細分階梯波ia、ib作為輸出端口。
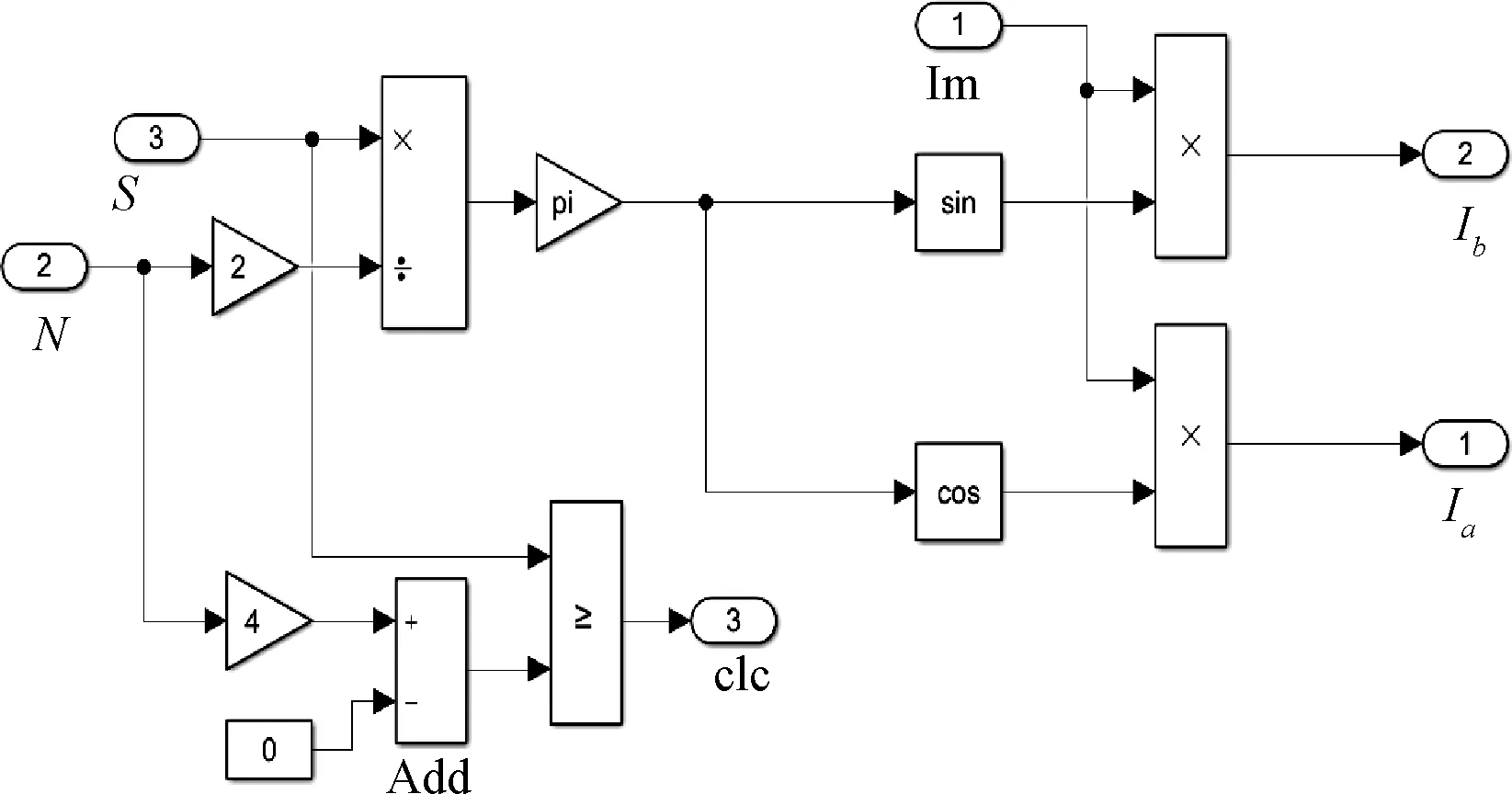
圖8 電流細分模型
PWM模型如圖9所示,擬合的細分階梯波ia、ib與繞組相電流Iref進行比較,通過電流滯環(huán)產(chǎn)生PWM信號,而PWM信號通過控制驅(qū)動芯片的開通和關(guān)斷,進而控制電機轉(zhuǎn)動。
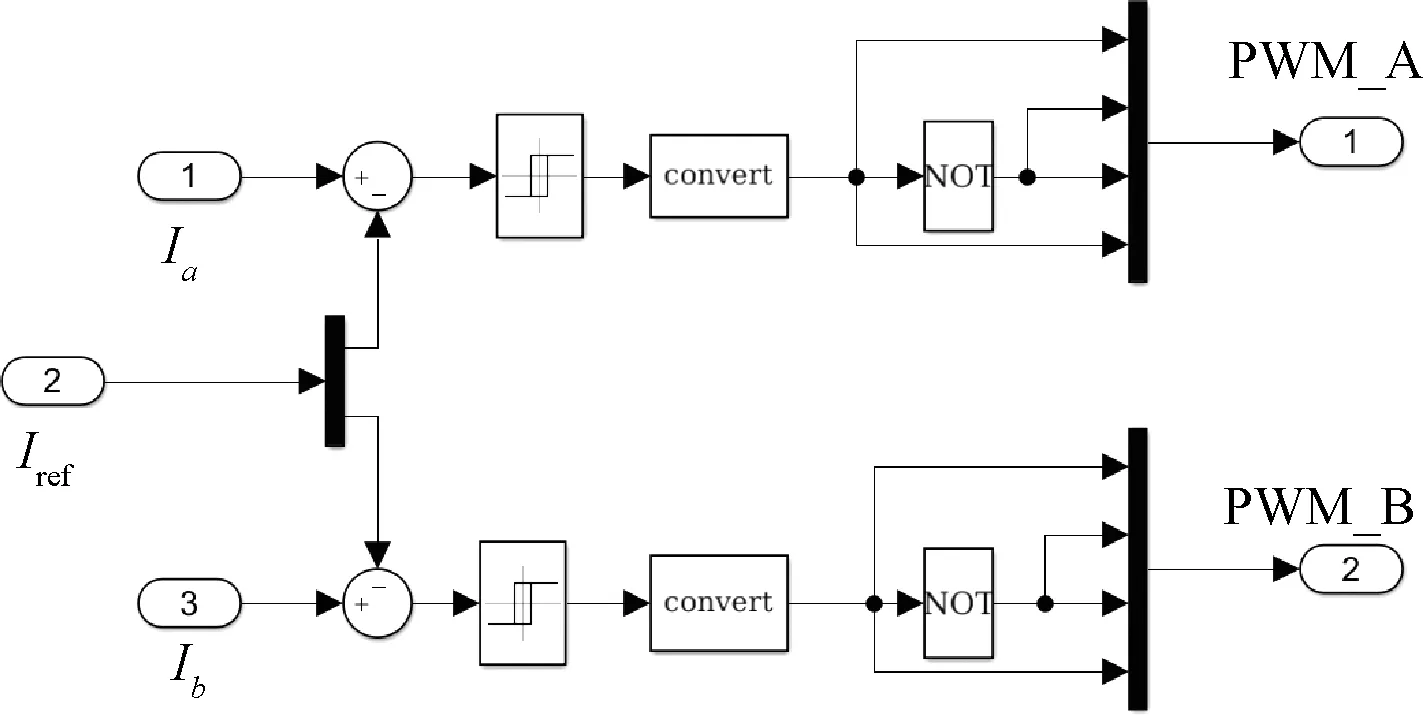
圖9 PWM模型
3 仿真結(jié)果與分析
3.1 電機仿真參數(shù)
仿真電機選用外徑28 mm的混合式步進電動機,電機詳細參數(shù)如表1所示。

表1 電機主要參數(shù)
最終得到的仿真模型如圖10所示。

圖10 兩相混合式步進電動機恒流細分驅(qū)動模型
3.2 仿真結(jié)果分析
保持電機額定電壓24 V(DC)、額定相電流0.5 A和轉(zhuǎn)速150 r/min不變,改變電流細分數(shù),仿真得到電機在整步、二細分、四細分、八細分和十六細分5種情況下的相電流與轉(zhuǎn)速波形,如圖11~圖15所示;相電流與電磁轉(zhuǎn)矩波形,如圖17~圖21所示。
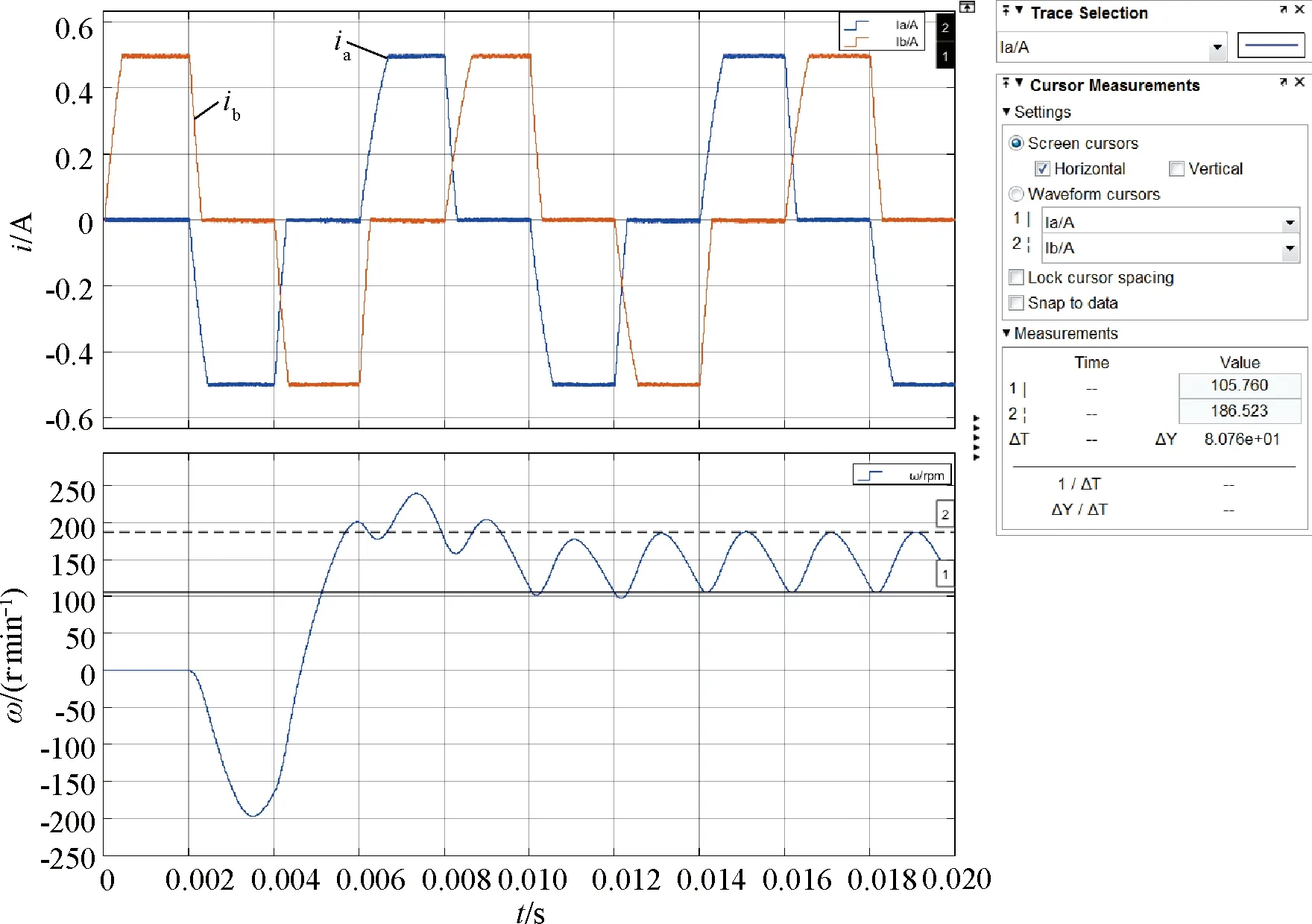
圖11 整步相電流和轉(zhuǎn)速波形

圖12 二細分相電流和轉(zhuǎn)速波形
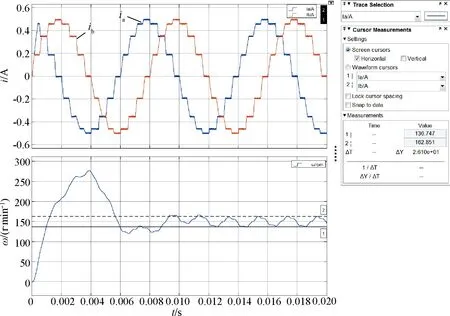
圖13 四細分相電流和轉(zhuǎn)速波形
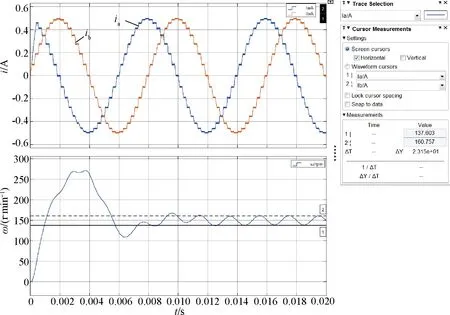
圖14 八細分相電流和轉(zhuǎn)速波形
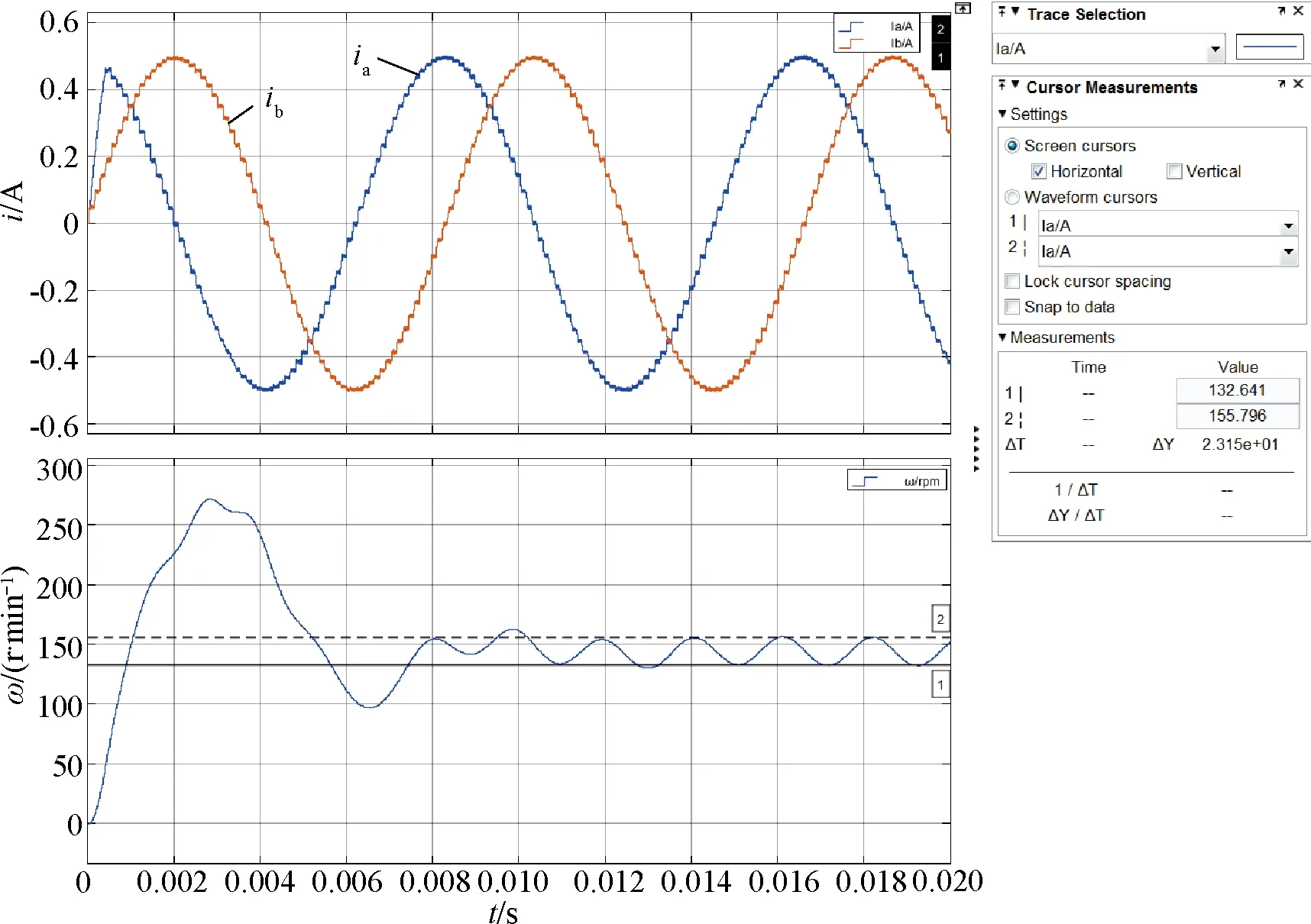
圖15 十六細分相電流和轉(zhuǎn)速波形
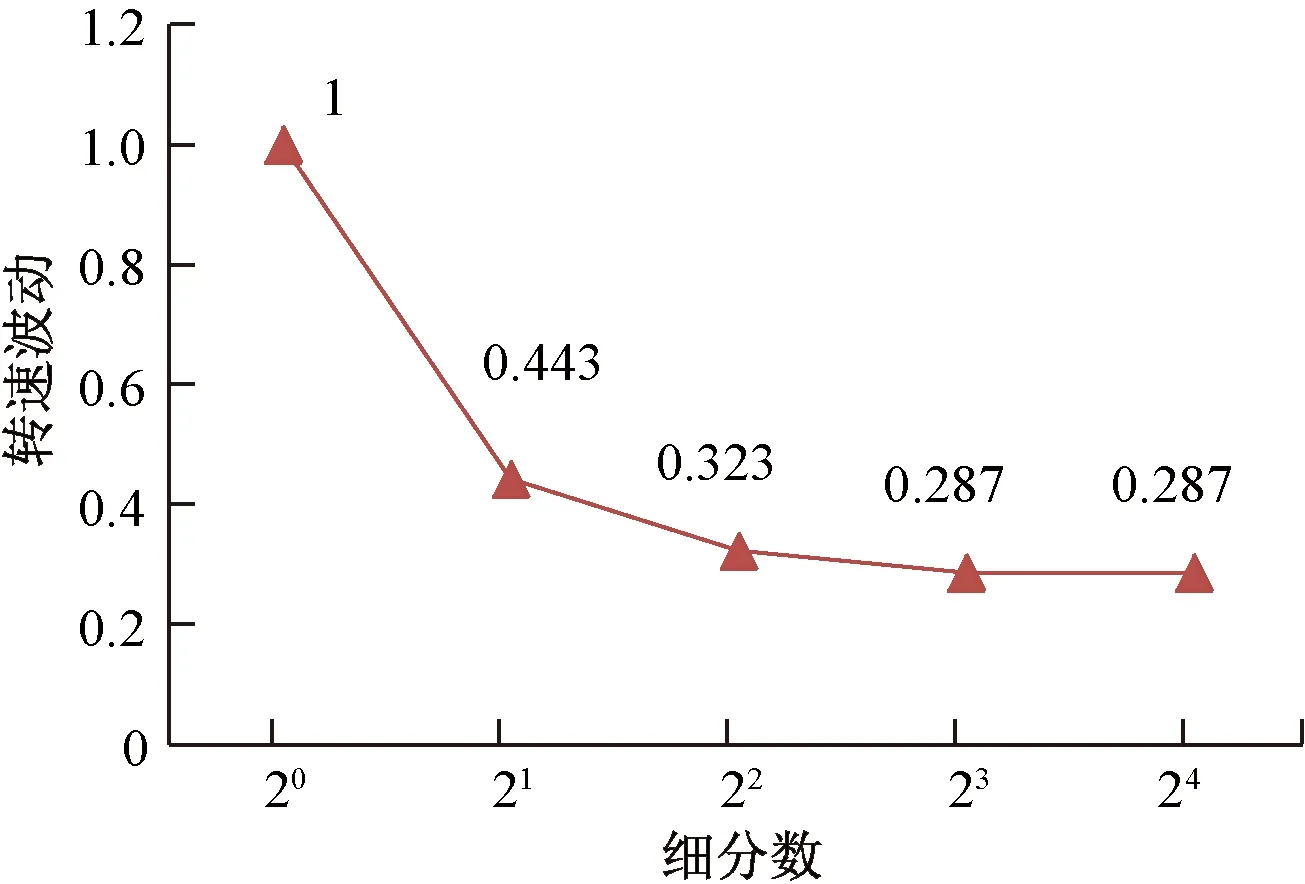
圖16 轉(zhuǎn)速波動與細分數(shù)的關(guān)系
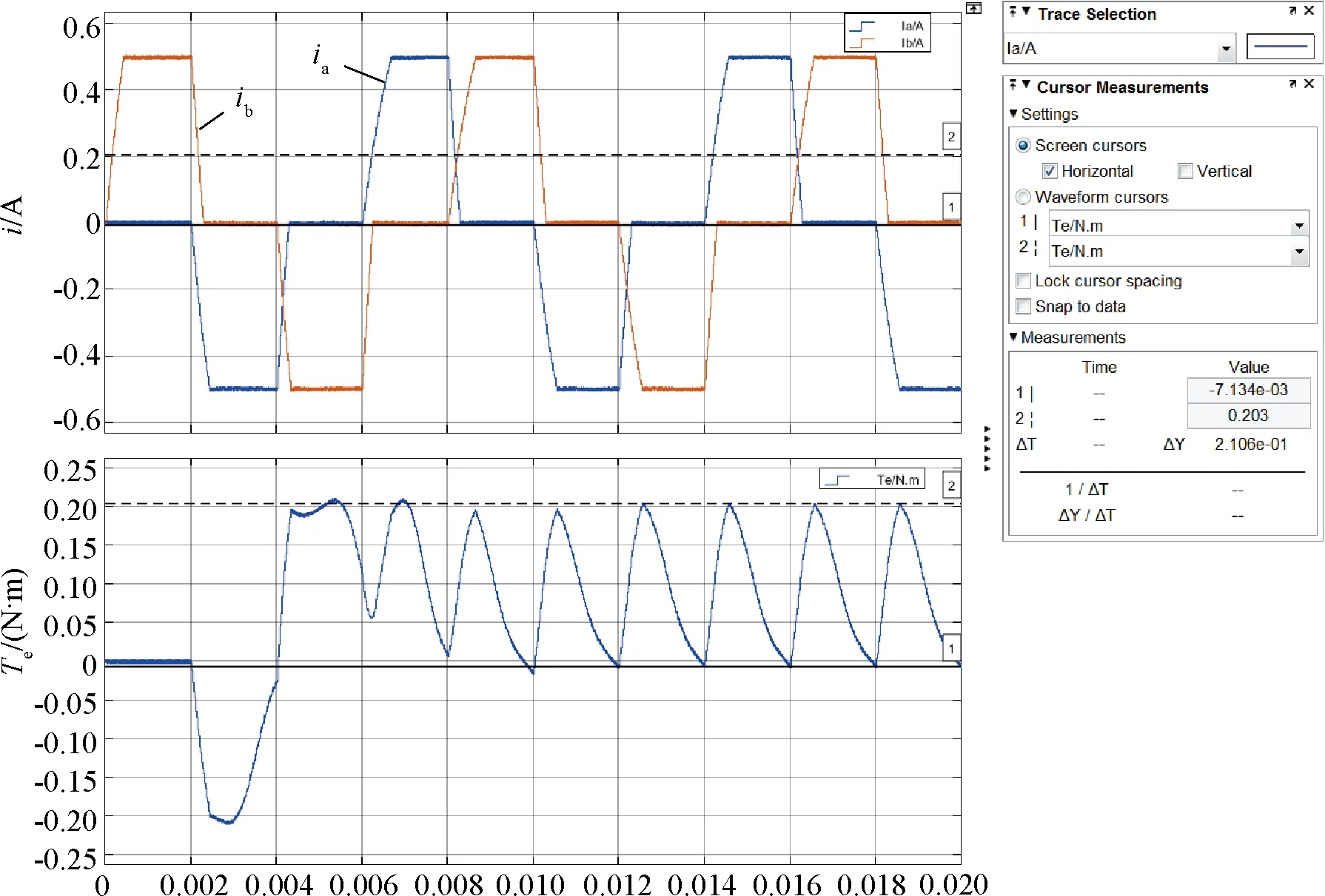
圖17 整步相電流和電磁轉(zhuǎn)矩波形
圖18 二細分相電流和電磁轉(zhuǎn)矩波形
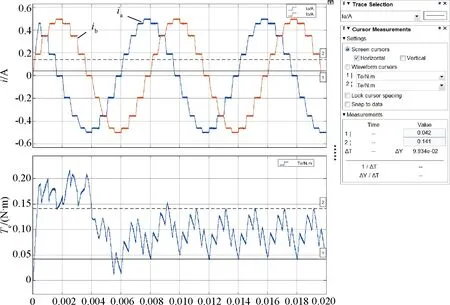
圖19 四細分相電流和電磁轉(zhuǎn)矩波形
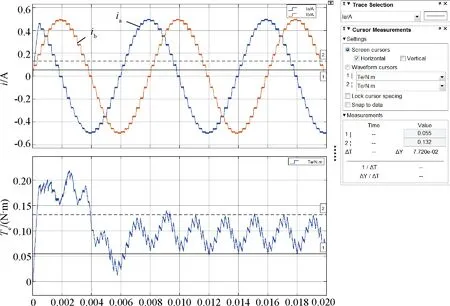
圖20 八細分相電流和電磁轉(zhuǎn)矩波形
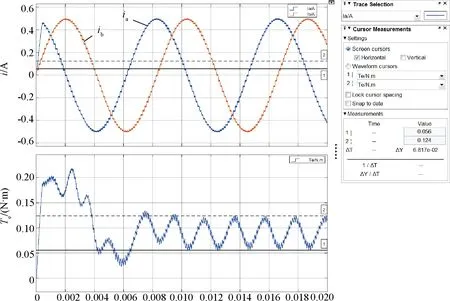
圖21 十六細分相電流和電磁轉(zhuǎn)矩波形
從圖11~圖15中可以看出,在整步、二細分、四細分、八細分和十六細分5種情況下轉(zhuǎn)速峰峰值分別為80.76 r/min、35.82 r/min、26.1 r/min、23.15 r/min和23.15 r/min。仿真結(jié)果顯示,隨著細分數(shù)的增加,轉(zhuǎn)速峰峰值在逐漸減小,如果將整步時電機轉(zhuǎn)速峰峰值作為基準(zhǔn),那么二細分、四細分、八細分和十六細的轉(zhuǎn)速峰峰值分別為整步時的44.3%、32.3%、28.7%和28.7%,如圖16所示,隨著細分數(shù)的增加,轉(zhuǎn)速波動逐漸降低,細分數(shù)越大轉(zhuǎn)速越平穩(wěn),二細分時轉(zhuǎn)速波動下降最快,隨著細分數(shù)的增加轉(zhuǎn)速波動趨于穩(wěn)定。
從圖17~圖21中可以看出,在整步、二細分、四細分、八細分和十六細分5種情況下,電磁轉(zhuǎn)矩峰峰值分別為0.2 N·m、0.128 N·m、0.099 N·m、0.077 N·m和0.068 N·m。仿真結(jié)果顯示,隨著細分數(shù)的增加,電磁轉(zhuǎn)矩峰峰值在逐漸減小,如果將整步時電機電磁轉(zhuǎn)矩峰峰值作為基準(zhǔn),那么二細分、四細分、八細分和十六細分別為整步時的60%、49.5%、38.5%和34%,如圖22所示,隨著細分數(shù)的增加,電磁轉(zhuǎn)矩波動逐漸降低,細分數(shù)越大電磁轉(zhuǎn)矩也越平穩(wěn),二細分時電磁轉(zhuǎn)矩波動下降最快,隨著細分數(shù)的增加電磁轉(zhuǎn)矩波動趨于穩(wěn)定。
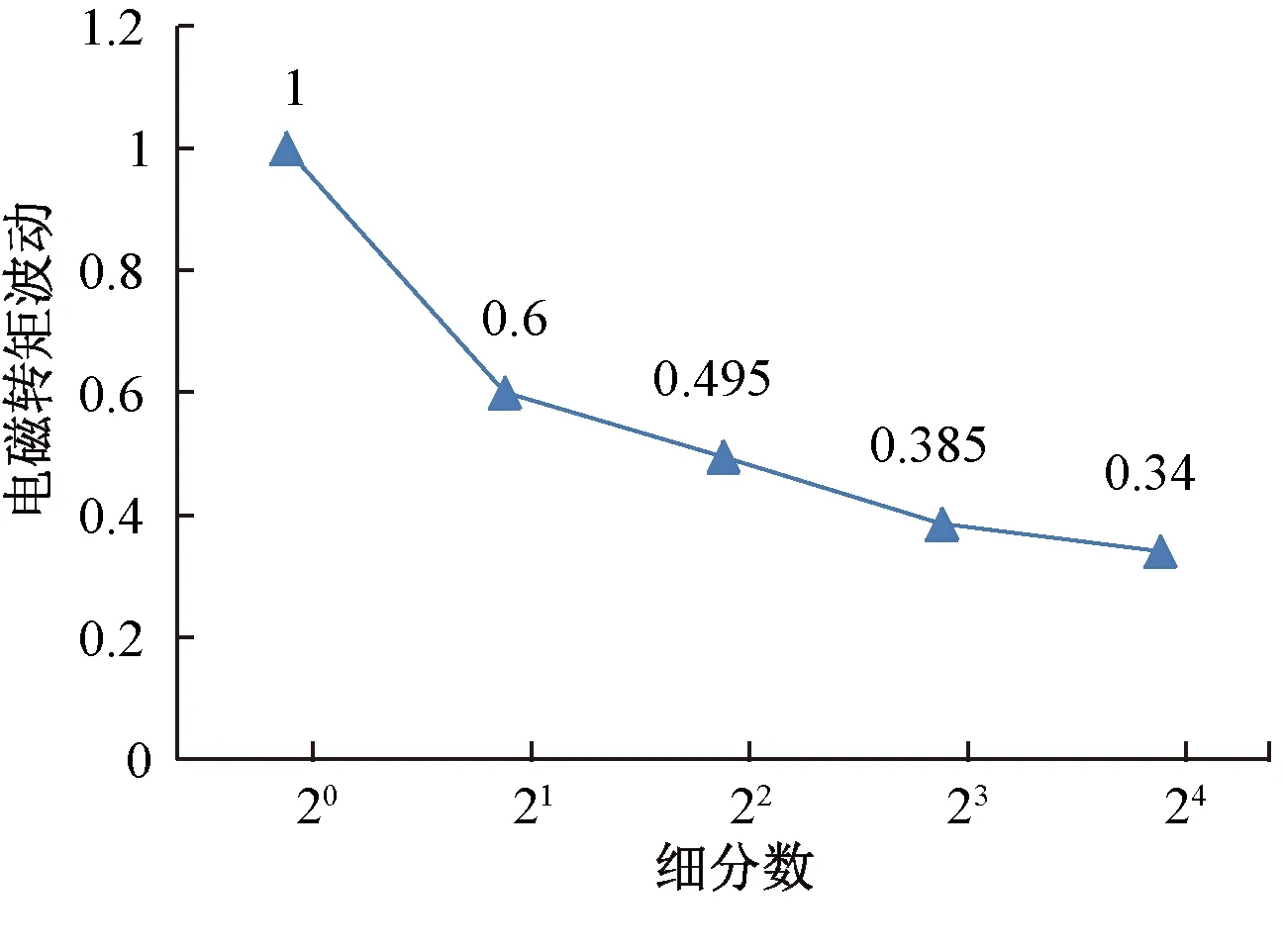
圖22 電磁轉(zhuǎn)矩波動與細分數(shù)的關(guān)系
4 試驗情況
步進電機轉(zhuǎn)矩波動測試不能像其它永磁電機一樣采用堵轉(zhuǎn)等方式進行,并且目前也暫未發(fā)現(xiàn)有更適合的測試方法。而轉(zhuǎn)速波動雖然可以直接測試,但是市場上測試系統(tǒng)的最小采樣間隔為0.1 s,在不同細分情況下測出的平均轉(zhuǎn)速基本相同,偏差為±3 r/min,因此也不具有實際參考意義。
對步進電機來講,細分的不同最終體現(xiàn)在電機的振動和噪聲上,因此本文從細分與電機振動的角度出發(fā),搭建了步進電機振動測試平臺,如圖23所示。對不同細分下的電機振動情況進行了測試,整步、二細分、四細分、八細分和十六細分情況下電機振動總量分別為45.8 mm/s,38.7 mm/s,34.3 mm/s,30.5 mm/s和28.2 mm/s。從試驗結(jié)果可以看出,隨著細分數(shù)的增加電機振動逐漸減小,電機運行逐漸平穩(wěn),與仿真結(jié)論一致。
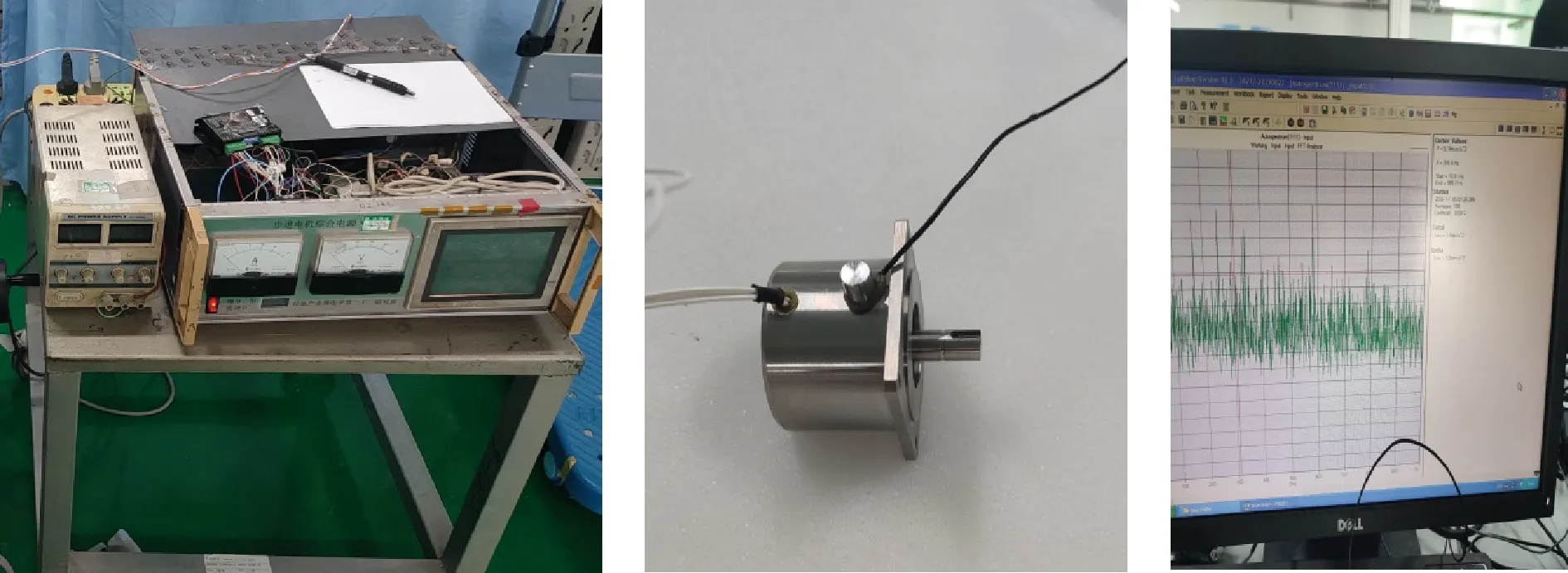
圖23 步進電機振動測試平臺
5 結(jié) 語
本文對兩相混合式步進電動機恒流細分驅(qū)動技術(shù)進行了研究,搭建了基于MATLAB/Simulink的恒流細分驅(qū)動仿真模型,仿真分析了不同細分數(shù)下的轉(zhuǎn)速和電磁轉(zhuǎn)矩,最后搭建了電機振動測試平臺,對步進電機在不同細分下的自身振動情況進行了測試,得出如下結(jié)論:
1)仿真結(jié)果顯示,隨著細分數(shù)的增加,轉(zhuǎn)速波動和電磁轉(zhuǎn)矩波動逐漸減小,即恒流細分驅(qū)動可以有效地降低轉(zhuǎn)速和電磁轉(zhuǎn)矩波動,進而降低電機振動與噪聲,使電機運行更加平穩(wěn)。
2)搭建了步進電機振動測試平臺,對步進電機在不同細分情況下的振動進行了測試,試驗結(jié)果顯示隨著細分數(shù)的增加電機振動逐漸減小,電機運行越平穩(wěn),與仿真結(jié)論一致。
3)對步進電機轉(zhuǎn)速和轉(zhuǎn)矩波動的測試方法還有待進一步的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19