基于Azure Kinect虛擬裝配系統的研究與開發
2022-10-13 08:42:10張天洋范勁松
機床與液壓 2022年18期
張天洋,范勁松
(1.佛山科學技術學院機電工程與自動化學院,廣東佛山 528000;2.佛山科學技術學院工業設計與陶瓷藝術學院,廣東佛山 528000)
0 前言
虛擬裝配技術是解決產品設計、裝配及培訓等問題的一種高效、低成本的手段。隨著計算機技術、人機交互技術等的發展,虛擬裝配技術也取得了長足發展。在人機交互方面,目前主要可分為兩大類:一類是通過可穿戴式設備進行交互,例如數據手套、頭戴顯示設備等。這類設備價格昂貴,且大多是特定用途定制,穿戴設備會給用戶造成額外的身體負擔,交互時間不宜太久。何良莉等利用手握式設備Neowand和三維位置跟蹤器FOB,實現了對虛擬場景中物體的交互控制,可完成基本的裝配工作。另外一類則是通過計算機視覺對人體姿態進行識別的非接觸交互形式,例如LeapMotion、Kinect等。王文鋒、楊韜提出了一種汽車虛擬拆裝系統,通過Leap Motion實現人機交互,該系統添加了評分機制,能夠在對車輛拆裝的同時進行評分,便于開展拆裝虛擬實驗教學;不足之處在于Leap Motion的使用范圍非常有限,而且該系統手勢識別準確率不高,仍有錯誤識別現象產生。PLOUFFE、CRETU介紹了一個通過使用Kinect傳感器采集深度圖實現手勢識別的新系統。該系統可以根據手勢位置,采用DTW算法對手勢進行處理分析,并將其與預先錄制的參考手勢模板進行對比識別,對單手或多手靜態和動態手勢的平均識別率達到92.4%。廖宏建、曲哲通過Kinect獲取人體信息,結合Unity 3D構建了低成本的虛擬裝配系統;該系統提高了與三維對象的交互效率,增強了學習沉浸感。
2019年微軟發布了新一代Kinect——Azure Kinect。該設備一經發布就吸引了大量學者和業界的關注。與前兩代Kinect相比,Azure Kinect在運動傳感器以及深度相機像素等各方面有了較大提升,讓Azure Kinect在跟蹤精度和穩定性方面得到了改善,同時利用Microsoft Azure AI的人工智能技術,對動作的準確識別有更大提升。目前Azure Kinect應用在虛擬裝配領域的研究較少,這方面的研究文獻和研究成果也非常缺乏。
本文作者在深入了解Azure Kinect技術特點的基礎上,將之作為人機交互設備對虛擬裝配相關技術進行研究,主要研究虛擬裝配的手勢識別算法、虛擬裝配功能的設計與實現。
1 Azure Kinect的新特性
Azure Kinect新增的1MP深度傳感器擁有寬視野和窄視野兩種工作模式,支持開發人員針對自己的應用程序進行優化。同時12MP RGB視頻攝像機提供一個額外的彩色流信息,并且針對深度流進行了優化調整。附帶的七麥克風陣列實現了遠距離語音控制和聲音捕獲,使用加速計和陀螺儀 (IMU) 實現傳感器方向和空間跟蹤。另外新一代的Kinect還能通過Azure AI的認知服務增強系統工具來開發語言和視覺功能。表1為Azure Kinect在視覺方面的新特性參數。

表1 Azure Kinect相機參數
ANTICO等對Azure Kinect動作捕捉能力進行了研究,并將Azure Kinect的準確性與Vicon 3D系統比較,結果表明:該設備對大部分動作識別都有較高的準確率,意味著低成本、體積小、質量輕、易安裝,且不需要額外佩戴設備的Azure Kinect在監控、識別人體姿態方面有獨特的優勢。LEE等使用Azure Kinect開發了可在桌面全息顯示交互的實時手勢識別,用戶可以在不使用其他穿戴設備的情況下控制桌面全息顯示器的全息圖。
在制造與物流業領域,Azure Kinect能通過深度攝像頭和高清攝像頭對物體形狀、顏色及尺寸進行鑒別,同時具備人體追蹤功能,能夠根據員工的動作來判斷員工的操作狀態,來檢查相應的物體是否擺放得當,從而進行監控和培訓。此外,Azure Kinect在醫療康復領域也有著較好的應用前景,它可以通過人體追蹤和Azure的圖像識別等功能,預防人的跌倒、幫助病患進行實時康復訓練等。
2 基于Azure Kinect的交互功能研究
2.1 語音交互功能
Azure Kinect中內嵌了七麥克風環形陣列,可以即時接收外部的聲音。同時可以利用微軟官方所提供的語音SDK訪問麥克風的輸入數據,這些數據可以通過Microsoft Azure所提供的語音識別功能,將音頻即時轉化為文字。Microsoft部署于云中的語言模型,能夠完成對基礎語言的識別任務。此系統將利用語言識別功能來實現部分的裝配任務,以實現輔助裝配的目的。
2.2 手勢交互功能及不足
在虛擬開發引擎Unity3D官方資源商店中的Azure Kinect Examples for Unity能夠較好地實現Azure Kinect與Unity3D之間的數據傳輸。作者利用上述資源來采集中指(HANDTIP_RIGHT)、拇指(THUMB_RIGHT)、手腕(WRIST_RIGHT)等的數據。所有關節的數據都包含位置和方向,其中每個關節坐標系的方向由四元數表示,所有關節坐標系都是深度攝像機的三維坐標系中的絕對坐標系,圖1為坐標系的方向,所有坐標系都為右手坐標系。
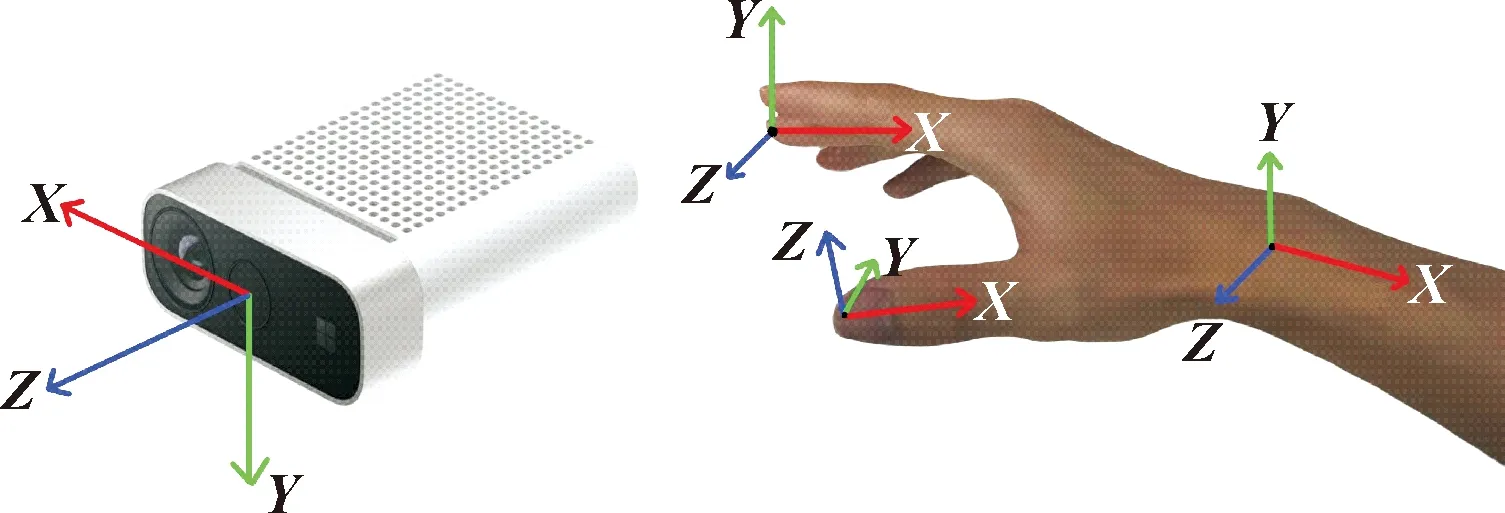
圖1 深度相機坐標系和手部關節坐標系
該資源中包含了一些實例,其中有抓取、釋放的手勢識別,但是這兩種手勢的識別還存在不足的地方,比如識別抓取、釋放的方法是判斷中指角度(HANDTIP_RIGHT與WRIST_RIGHT方向的夾角)是否大于50°,大于50°為抓取,小于50°則為釋放。但在作者研究發現其識別準確率不夠高,而且不穩定。主要原因是該方法采用的單一分割閾值,無法分割一直處于運動狀態下中指角度的變化,導致識別率偶爾高于90%,而有時達不到75%。作者利用Azure Kinect分別采集了兩組數據,在MATLAB中顯示結果(圖2)。如果想要獲得較高的識別準確率,第一組數據(圖2(a))的角度分割閾值應在50°左右,而第二組(圖2(b))則在70°左右。這會導致單一的分割閾值無法滿足穩定且準確的識別效果。為了提高這兩種基本手勢的識別率,作者基于SVM算法對兩種手勢進行分類識別。
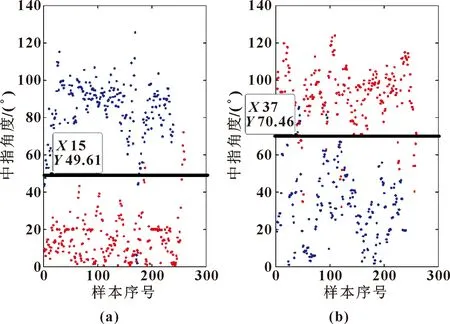
圖2 中指彎曲角度與分割閾值
3 手勢識別算法的優化
3.1 SVM算法
支持向量機(SVM)是一種在監督學習模式下的線性分類器,1995年由CORTES和VAPNIK提出。支持向量機的提出基于統計學習理論和結構風險最小化準則,在解決小樣本、非線性和高維模式識別問題中表現出許多特有的優勢。臺灣大學林智仁等開發設計的LIBSVM軟件包包含了線性、多項式、RBF和S形函數4種常用的核函數供選擇,能夠很高效地處理多類型問題、交叉驗證的參數選取、對不均勻樣本加權平均等。上述4個核函數中,使用得最為普遍的是RBF核函數[公式(1)],它具有較寬的收斂域,可以適用于任意分布的樣本,是較為理想的分類依據函數。以下實驗過程將選取RBF函數為核函數。

(1)
引入核函數方法后,在兩種類型線性不可分時,需要解決以下優化問題:
最小化:
(2)
限制條件:

公式(4)中()與核函數的關系為:(,)=()()
其中公式(2)中參數可以人為設定,其取值會直接影響模型的性能。越高,分類越嚴格,對誤差容忍度越低,容易過擬合;越小,就意味著有更大的錯誤容忍度,越容易欠擬合。無論過大還是過小,泛化能力都會變差。選擇RBF函數作為核函數后,該函數自帶一個參數,即公式(1)中的。該參數隱含地決定了數據映射到新的特征空間后的分布,其大小也會直接影響到模型的性能。合適的、參數組合能提升模型的準確率和魯棒性。
LIBSVM的分類任務通常將數據分成訓練樣本和測試樣本。訓練樣本和測試樣本中每個數據都有自身的“類型”和附帶的幾種“屬性”(即特征或觀察到的變量)。LIBSVM的目標是基于訓練樣本生成一個模型,然后根據該模型預測測試樣本的類型。
3.2 手勢基本特征的選取
虛擬裝配中常用的手勢主要有旋轉、抓取、釋放、點擊。其中抓取與釋放作為主要手勢,使用頻率遠遠高于其他手勢。下面將重點分析這兩種手勢的識別問題。
把釋放和抓取狀態定義為兩種類型,釋放狀態為類型Ⅰ,抓取狀態為類型Ⅱ;它們都有3種屬性:中指角度為屬性1、拇指角度(THUMB_RIGHT與WRIST_RIGHT方向的夾角)為屬性2以及拇指與中指的夾角(HANDTIP_RIGHT與THUMB_RIGHT方向的夾角)為屬性3。在手掌處于釋放狀態和抓取狀態下,分別采集這3種屬性的數據。利用這些數據在MATLAB下用LIBSVM訓練出最優的參數模型并進行預測實驗。
3.3 數據的選取與采集
文獻[13]研究中發現Azure Kinect在預熱50~60 min后,會獲得一個更穩定的輸出。文中有關Azure Kinect的數據均在預熱以后采集的。文獻[14-15]的研究都表明在距離1~2 m以內時,Azure Kinect對身體大部分關節的跟蹤誤差在很低的水平,在該范圍內隨著距離的增加,跟蹤誤差會略微增大。
作者選擇在1、1.5、2 m三個位置采集數據,經過不同距離的對比,找出較為合適的識別距離。實驗采集了屬性1的數據并通過MATLAB顯示處理,圖3為3組不同距離下采集的數據:在距離1、2 m時,手勢分割效果不佳;距離1.5 m時,分割效果優于其他兩組。因此,以下的實驗將在距離1.5 m處進行。
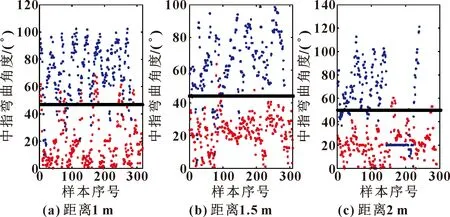
圖3 不同距離下中指彎曲角度
在實驗過程中作者發現中指角度對這兩種手勢類型分類的影響很大,因此將3種屬性分為3組(屬性1、2;屬性1、3;屬性1、2、3)來分別訓練出3種模型,然后比較3種模型對兩種對應手勢狀態的分類效果,最后選出分類效果最好的預測模型。
3.4 實驗對比
將對上述3種屬性組合下采集的數據通過LIBSVM在MATLAB下進行可視化分析。采集數據分為訓練樣本和測試樣本,通過LIBSVM將訓練樣本訓練成參數模型,再通過該參數模型對測試樣本進行預測分類,最后把預測結果通過MATLAB顯示出來(此階段中所用的參數組合為=1,=1)。
結果顯示:在手移動的情形時,屬性1、3下訓練的模型在預測時準確度只有87%左右(圖4(a));屬性1、2下的準確度能達到97%(圖4(b));屬性1、2、3的情況下識別準確度在91%左右(圖4(c))。顯然,在手不斷移動的過程中,屬性1、2所訓練的模型,預測樣本的準確率最高。此外,在手靜止時,3組數據(圖5)都表現出很高的識別準確率(與圖4順序相同)。
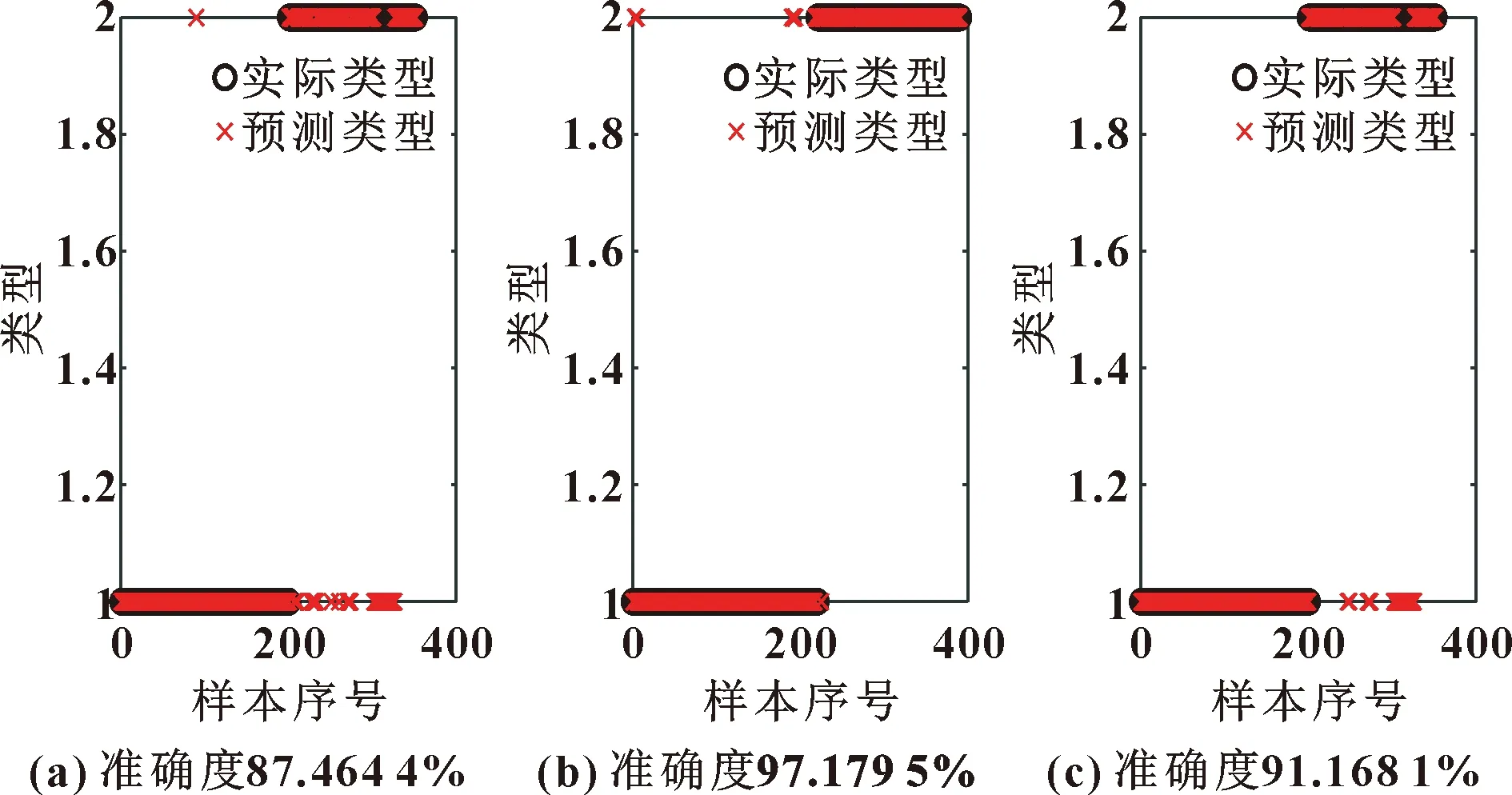
圖4 手移動時模型預測效果
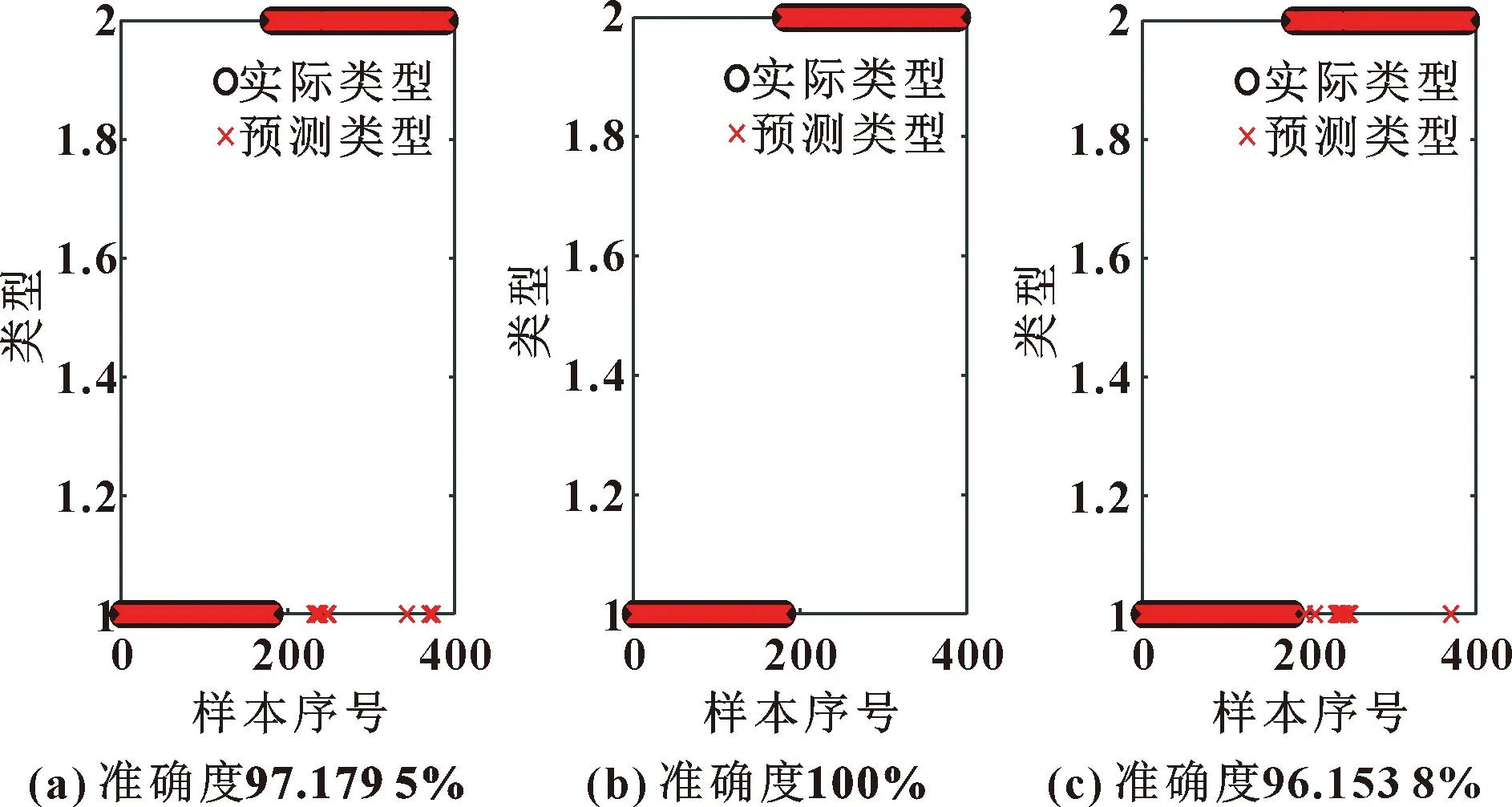
圖5 手靜止時模型預測效果
3.5 手勢識別算法的優化
對于LIBSVM算法,公式(2)中的參數和公式(1)中的參數()是可以人為設定的參數,它們對模型的預測效果有直接的影響。
利用網格搜索和交叉驗證,尋找更合適的、參數組合,提高該模型分類的準確性及魯棒性。交叉驗證是將給定樣本數據等分為組,選出其中-1組作為訓練樣本用于訓練模型,剩余1組為測試樣本,用于驗證上述模型性能,然后重復這個過程次,直到每組樣本都被用做一次測試樣本。作者將樣本分為10組進行交叉驗證。網格搜索是將所有給定的、參數組合窮舉遍歷,從所有的組合中選取最優組合(交叉驗證率最高的組合)。作者先用粗網格確定比較合適的參數組合區域,然后用更精細的網格在此區域搜索找到更優的、參數組合,粗網格所用、組合范圍為(、=2,2,…,2,2)。經過粗網格的篩選后將范圍定在=1~4,=64~256;再通過幾次更加精細的篩選后,最終獲得以下的、參數等高線(圖6)。最終確定的參數組合為=1.515 7、=119.428 2,交叉驗證率97.878 8%。再用該參數訓練的模型預測此前的測試樣本(屬性1、2),準確率為97.435 9%(此前預測率為97.179 5%)(圖7)。該模型有較好的魯棒性,在預測不同的樣本數據時,準確率也基本高于參數尋優之前的模型。因此,最終將該模型用作兩種手勢的分類模型(屬性1、2)。
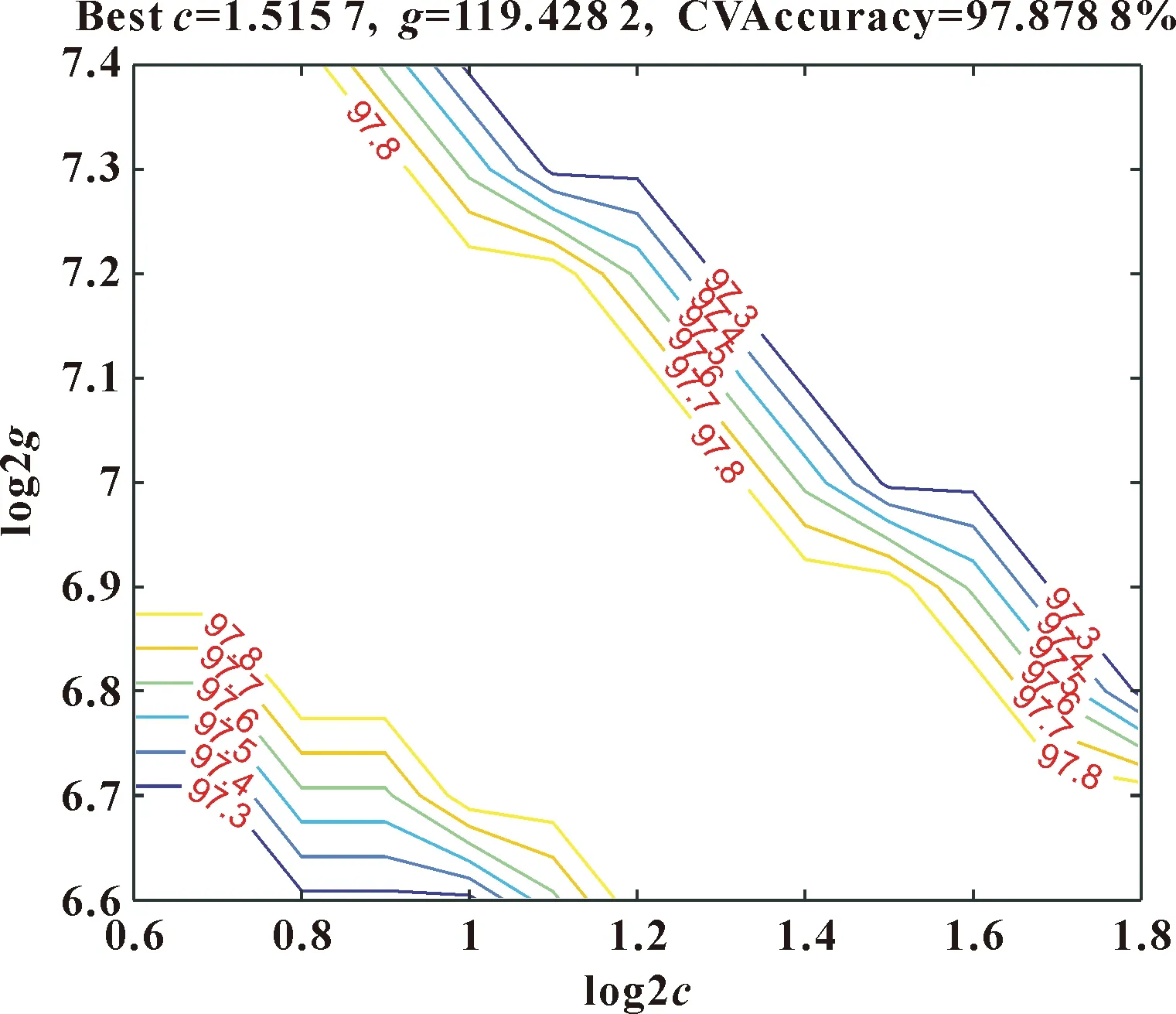
圖6 參數c、g等高線
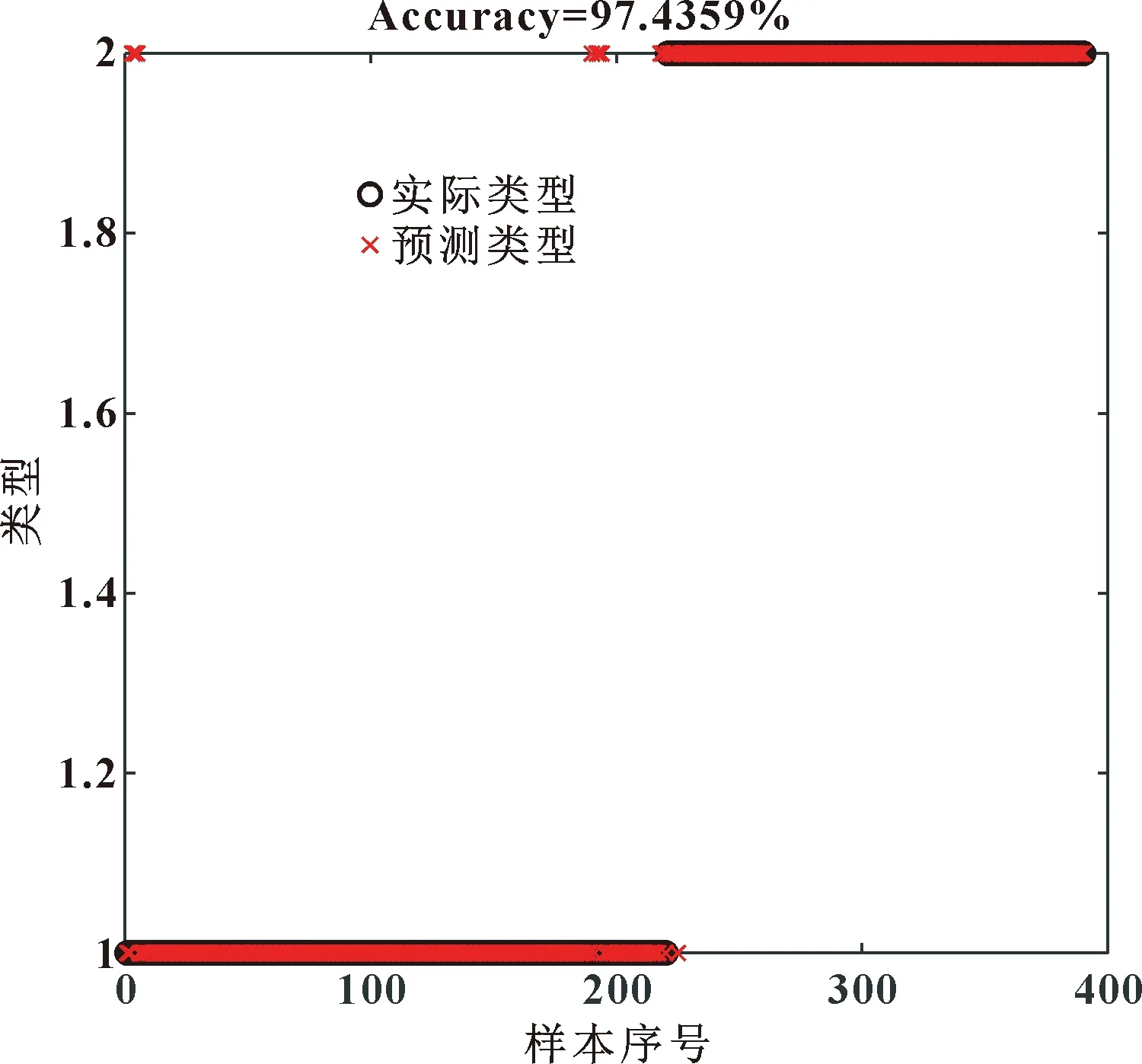
圖7 參數尋優后的預測結果
4 虛擬裝配系統設計
Unity3D是一款強大的虛擬現實開發引擎,其三維圖形渲染能力強、動畫系統豐富,開發者可以便捷、快速、高效地開發三維和二維應用。
作者將Azure Kinect作為人機交互設備,利用Unity3D作為開發平臺,并且引入了前面研究的手勢識別優化算法,實現了一個初步的產品虛擬裝配交互系統。
4.1 基本框架及流程
開發的虛擬裝配系統包括虛擬環境、交互操作、模型管理等,系統框架及流程如圖8所示。進入系統首先會判斷是處于哪種模式,如果是移動裝配模式,用戶可以調取相應的零件,開始進行裝配,直到最后所有零件成功裝配,裝配任務結束;如果處于變換視角模式,則可以調整到合適的裝配視角后,繼續完成裝配流程。
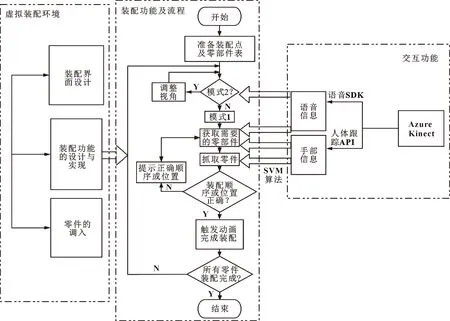
圖8 系統框架及流程
系統中零件的裝配是靠手勢交互完成,切換模式由語音交互控制,手勢交互和語音交互都可以完成零件的調入功能。
4.2 系統主要功能的設計與實現
(1)零件的調入
作者在虛擬裝配系統的界面上設置一塊面板(圖9左邊)用于從零件庫中調入零件。面板上面放置了所有零件對應的按鈕,點擊相應按鈕,系統就調入相應的零件。此外,還可以通過語音來獲取零件,只需要說出零件名稱,系統就會調入相應的零件。
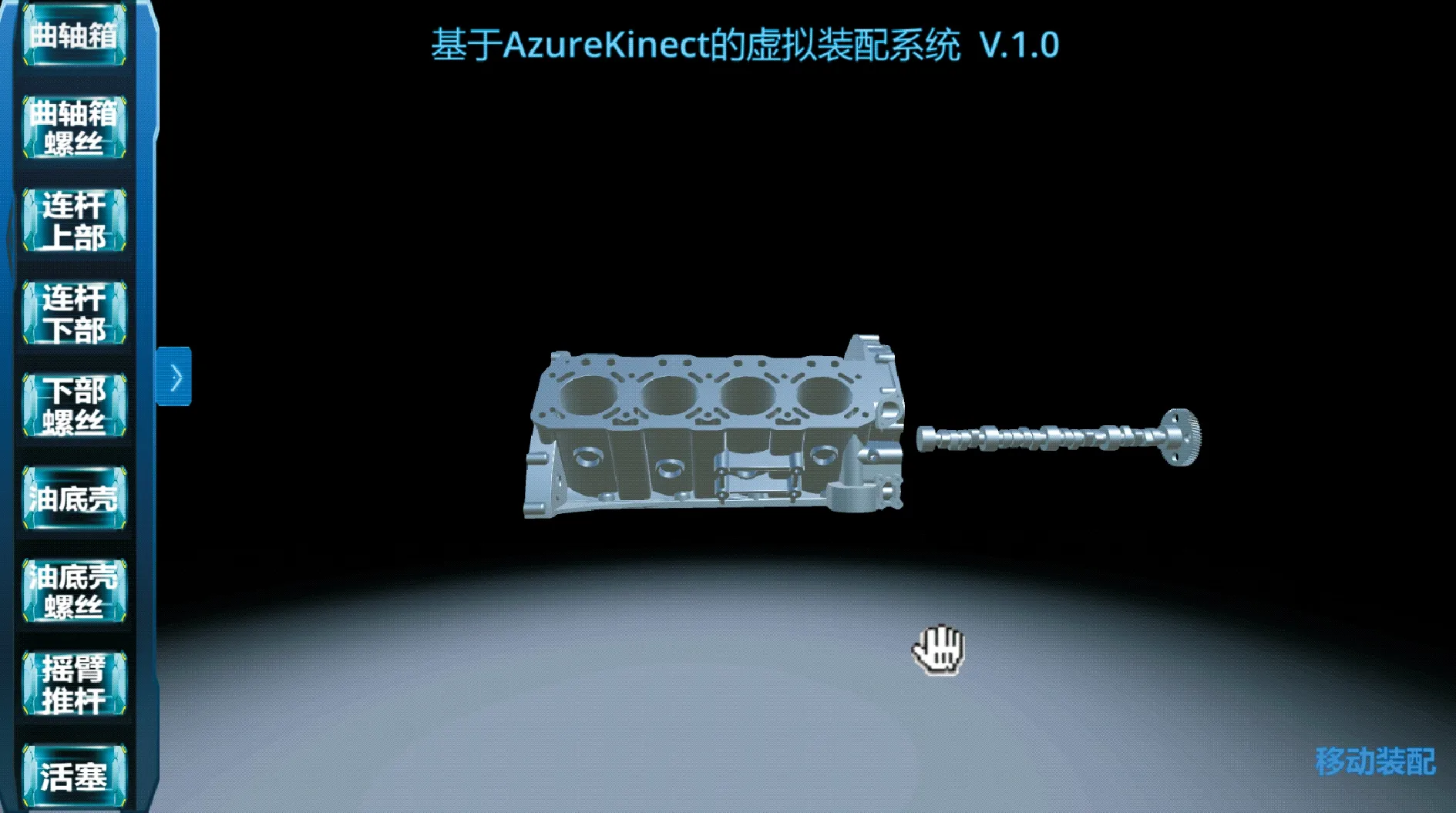
圖9 虛擬裝配系統界面
(2)零件的抓取與幾何約束
將上述經過SVM算法優化后的手勢識別模塊加入裝配系統中,用作識別抓取、釋放零件手勢。通過實際操作發現該方法能夠較好地完成對零件的抓取、釋放操作,并且零件會隨著手掌較為準確地移動到相應裝配點處。
為了進一步簡化操作提升裝配效率,每個零件約束在設定的區域,使零件不會過多地偏離正確路徑。此外,在可裝配點附近設置提示點,當用戶將零件往錯誤的裝配點進行裝配時,系統會給予限制并提示裝配警告。
(3)裝配視角與裝配模式設計
文中所用的方法是基于手勢的識別控制,如右手向左邊揮動,則視角會向左旋轉一定角度。此系統具有兩種模式;模式1為移動裝配模式,手勢交互可以調入零件以及抓取零件進行裝配;模式2為變換視角模式,主要用來調整合適的視角。兩種模式的切換可以通過語音來控制,用戶只需說出“切換模式”,兩種模式就會發生切換,當前模式顯示在界面的右下角。
(4)裝配動畫
由于Azure Kinect的本質是基于計算機視覺的識別,在操作上無法像鼠標那樣精準。為了不影響裝配的體驗感以及效率,在零件裝配的最后一步制作了動畫。當零件移動到準確的裝配點就會觸發對應的動畫,引導完成該零件的裝配。
(5)零件的裝配
將手掌移動到相應零件的位置,對零件做出抓取手勢后,零件高亮代表被選中,零件會隨著手掌的移動而移動。圖10左為凸輪軸被手勢抓取后的狀態,零件被移動到相應位置后完成該零件的裝配。然后進行下一個零件的裝配,通過語音或手勢點擊按鈕來調入相應零件,再抓取裝配該零件。圖11為曲軸的裝配過程。重復上述步驟,直到所有零件裝配完成。圖12為某發動機零部件裝配完成圖。
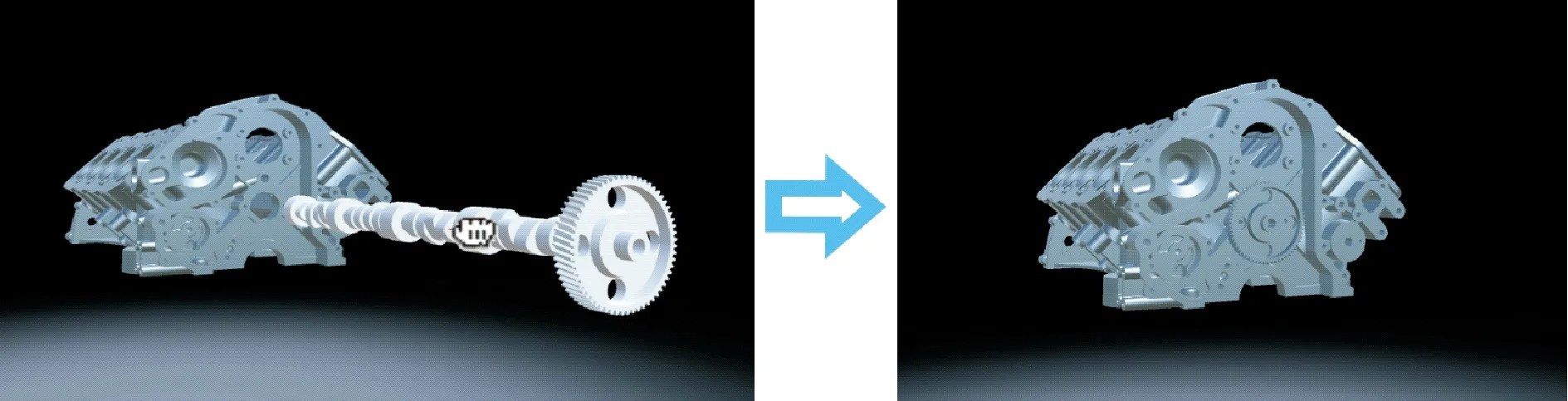
圖10 凸輪軸裝配完成

圖11 曲軸裝配完成

圖12 裝配完成
5 結論
對Azure Kinect應用開發時手勢識別不穩定的問題,提出了基于優化SVM算法的手勢分類識別方法,提高了兩種高頻手勢識別的準確性及魯棒性。同時將其應用在虛擬裝配系統的開發中,驗證了該方法的應用效果和在系統中完成基本裝配任務的實用性。同時加入語音輔助裝配,增強了用戶的沉浸體驗感。作者在研究中也發現對于復雜度很高的裝配任務實現效果不夠理想,主要是因為手勢交互無法完成對某些特殊裝配角度的精準把控。在后續的研究中,將嘗試通過微軟云服務中的Azure AI的認知服務,進一步加深系統對人的行為的理解能力和準確性,如理解人說話的語義、理解圖像中的特定信息等,從而幫助用戶完成一些僅依靠手勢操作難以完成的任務。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
